基于復合電源的電動船能量管理策略
2018-10-16 05:57:38張澤輝高海波林治國宮文峰
中國航海 2018年3期
張澤輝, 高海波, 陳 輝, 林治國, 宮文峰
(武漢理工大學 a. 高性能艦船技術教育部重點實驗室; b. 能源與動力工程學院, 武漢 430063)
隨著電力電子技術和新能源技術不斷發展,越來越多的船舶使用電力推進系統[1],而頻繁的負載波動會對船舶電力推進系統造成惡劣影響[2]。使用儲能裝置可使船舶的電網柔性化,降低負載波動對電網的影響。近年來,儲能技術快速發展,以復合電源為動力源的電動船逐步得到應用,對推進綠色水運的發展具有重要意義。[3]
2010年東京海洋大學研發出采用速充鋰電池的電池推進船“雷鳥1”號[4];2015年西門子公司與挪威造船廠合作建造世界第一艘以動力電池為能量源的電動渡船[5];2017年湖州市港航管理局、上海瑞華(集團)有限公司和武漢理工大學等聯合研發出全國首艘500噸級新能源電動貨船;當前廣州發展瑞華新能源電動船有限公司正在建設世界上第一艘千噸級電動船。

本文以基于復合電源的電動船為研究對象,設計能量管理策略,創新性地將支持向量機(Support Vector Machine,SVM)與濾波器功率控制相結合,建立能量管理策略評價模型,對濾波器時間常數進行優化。
1 純電動船電力推進系統
將超級電容和動力電池組合成復合電源,結合兩者的優勢,以滿足船舶運營的能量需求和船舶瞬時功率需求。超級電容在高負載時迅速釋放能量,從而延長電池使用壽命并提高電能質量。復合電源拓撲結構主要分為被動式、主動式和半主動式等3種。被動式為超級電容與電池直接并聯,主動式為超級電容與電池經直流-直流(DC/DC)變換器之后并聯。被動式不可控,能量效率高;主動式控制設計復雜,能量效率較低。半主動式為超級電容經DC/DC升壓之后與電池并聯,該結構結合前兩種復合電源拓撲結構的優點,能提高超級電容的使用率,對負載波動的響應能力好,系統成本較低。[13]
“Alsterwasser”號是一艘燃料電池客船,設計參數:船長25.5 m,船寬5 m,吃水1.3 m,額定載客100名,最高時速15 km/h,每天運營約8 h。分析該船在阿爾斯特湖上的典型工況可知,該船平均功率需求為41.6 kW,峰值功率為112 kW。[14]圖1為電動船動力系統,將該船的燃料電池系統模擬改裝為半主動式復合電源動力系統,采用該船的典型工況數據進行能量管理策略設計,并對該策略進行仿真驗證。
2 能量管理策略的設計與實現
能量管理策略由支持向量機、低通濾波器和閾值規則等3部分構成。能量管理策略控制見圖2,功率需求Pload先通過低通濾波器得到低頻功率需求PLload,PLload通過規則控制器分解出動力電池承擔的功率Pbat,總的功率需求Pload減去電池承擔的功率得到超級電容承擔的功率Puc。
2.1 基于支持向量機的船舶工況識別
支持向量機最早由VAPNIK等依據統計學習理論提出,該技術依靠嚴謹的數學理論,使用少量的樣本訓練便可獲得優異的性能[15]。船舶航行主要有定速航行和機動航行2種工況。在定速航行工況下,功率需求較為穩定,但存在輔機設備啟動造成的脈沖性負載。在機動航行工況下,功率需求有較大波動。采用一個固定的濾波器難以滿足全工況需求,故采用支持向量機選擇相應的濾波器控制。
支持向量機輸入參數為Pload(t-1),Pload(t),(Pload(t)-Pload(t-1))/Ts,輸出參數Gt={1,2}(1為定速航行,2為機動航行)。從標記的典型工況點中隨機選取80%作為訓練集,剩下的20%作為驗證集。在標準化處理之后,采用RBF核函數進行訓練。對向量機進行驗證,訓練集錯誤率為0.011 8,驗證集錯誤率為0.012 5。2個集合的錯誤率結果相近,可知該算法具有良好的泛化能力。引入隨機噪聲(均值為0,方差為0.01),支持向量機在隨機噪聲干擾下的識別結果見圖3。由圖3可知,支持向量機對船舶工況的判別有很高的準確性。
2.2 低通濾波器設計
濾波器時間常數T可控制船舶動力系統的功率分配。在定速航行和機動航行工況下選擇的低通濾波器分別為
(1)
式(1)中:T1和T2為濾波器時間常數。
2.2.1評價模型的建立
在滿足工況要求的前提下,Ibat的波動越小越好,VDC的波動越小越好,復合電源的能量損失JE越小越好,設計的評價公式如下。
(1) 動力電池損耗評價公式為
(2)
(2) 母線電壓波動評價公式為
(3)
(3) 系統能量損失評價公式為
(1-ηDC)PDC(i)]}
(4)
式(2)~式(4)中:Ibat(i)為i時刻的電池電流;VDC(i)為i時刻的直流母線電壓;t為仿真時間步長;Ruc為超級電容內阻;Iuc(i)為i時刻的超級電容電流;Rbat為電池內阻;ηDC為DC/DC變換器效率;PDC(i)為DC/DC變換器i時刻功率。
對式(2)~式(4)進行組合,得到評價函數為
minJ=αJbat+βJDC+λJE
(5)
該函數的目標是減小電池的電流波動,從而延長其使用壽命,提升電網電能質量,提高復合電源的能量效率。該能量管理策略為純電動船設計,電池損傷權重α與電網波動權重β為最重要的因素,采用半主動式拓撲結構,系統能量效率較高,因此經濟型權重λ取值最小,故設權重系數依次為0.5、0.4、0.1。約束條件為
(6)
式(6)中:第1個約束條件為超級電容與動力電池的輸出功率等于船舶需求功率;第2個約束條件為超級電容的電壓不得低于最大電壓的1/2,若超級電容電壓太低,電壓變換器便不能穩定工作;第3個約束條件和第4個約束條件為超級電容與電池都不能過電流充放電。
2.2.2濾波器時間常數優化
優化過程分為參數設定、仿真運行、計算性能函數和選取最優值等4部分,流程說明:
(1) 設定電動船的動力系統模型的低通濾波器參數;
(2) 進行仿真,若仿真結果不滿足邊界條件,則退出,重新設定低通濾波器參數;
(3) 使仿真結果數據無量綱化,用式(5)計算;
(4) 設定低通濾波器的時間范圍和時間步長,依次代入模型進行計算,選取最優時間常數值。
針對機動航行工況,優化結果為T2=16.8 s。船舶在定速航行中,設定較小的時間常數既能滿足船舶工況需求,又可減少使用超級電容,提高能量效率,同時動力電池的輸出電流有細微的波動,有助于活化電池,延長電池的使用壽命。考慮到小型船舶副機啟動時間為數秒,經過反復調試,T1=5 s能較好地滿足定速工況要求。
2.3 閾值規則
規則的輸入是功率需求的低頻部分,輸出為動力電池設定功率和超級電容設定功率。該規則設計的目的:控制超級電容的荷電狀態(State Of Charge,SOC)在合理范圍內,并防止動力電池瞬時大功率充放電。控制規則見表1,其中:PLload為低頻負載功率;Pbmin為電池輸出功率最低值;Pbmax為電池輸出功率最大值;Pbat為電池輸出功率;Puc2為超級電容在規則控制部分的輸出功率;Pcharge_uc1為超級電容在充電模式1下的充電功率;Pcharge_uc2為超級電容在充電模式(2)下的充電功率。
1)當超級電容SOC>90%,PLload
2)當超級電容70%≤SOC≤90%,PLload
3)當超級電容SOC<70%,PLload
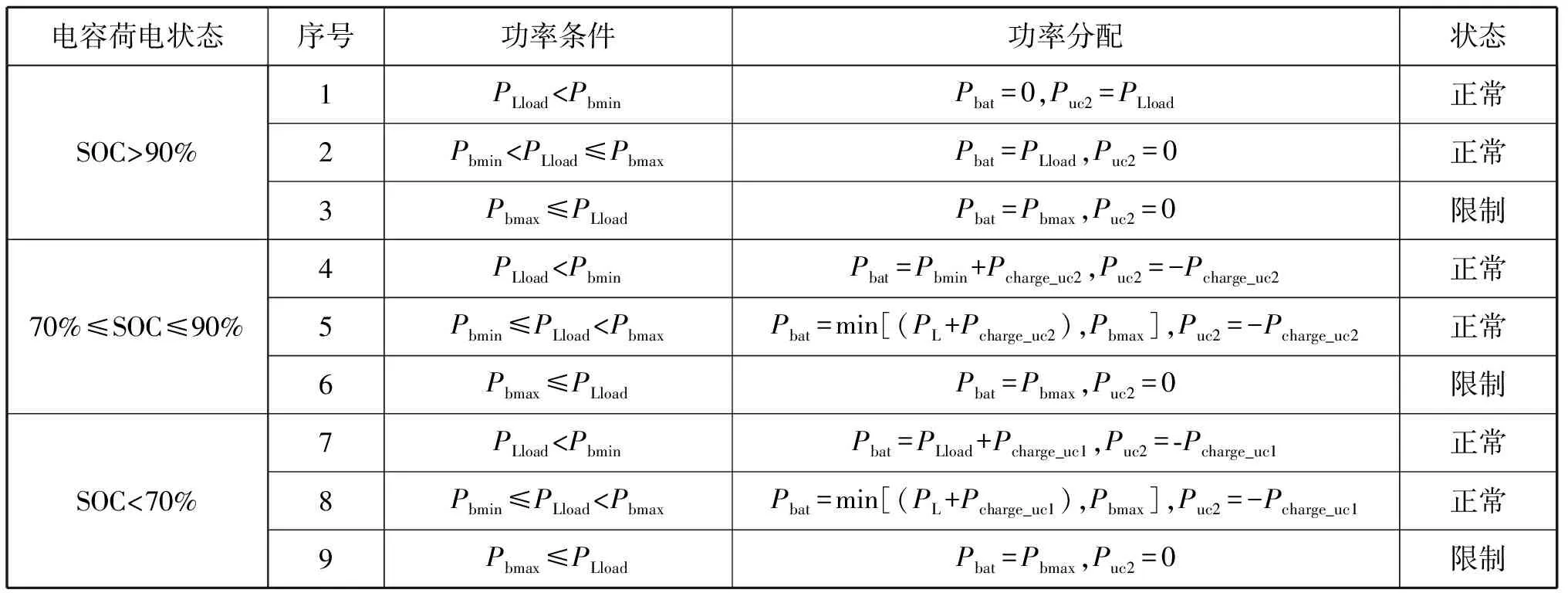
表1 閾值規則
3 仿真試驗分析
3.1 電動船仿真模型
圖4為電動船仿真模型,在SIMULINK環境下建立電動船動力系統仿真模型。系統包括復合電源模塊、負載模塊和能量管理模塊等3部分,其中:動力電池容量為500 A·h,額定電壓為600 V;超級電容容量為23.6 F,額定電壓為336 V。
3.2 脈沖負載仿真
在0.5 s時,對半主動式和被動式復合電源模型施加10 kW負載,持續時間為0.5 s。被動式的電池參數設置與半主動式的相同,超級電容容量為11.8 F。圖5脈沖負載下的功率分配,在施加負載期間,被動式的電池輸出功率為6~7 kW,超級電容輸出功率為3~4 kW,電壓瞬間下降近0.9 V。半主動式復合電源的超級電容近乎承擔全部負載,電壓略微下降,有效減輕瞬態負載對電池和電網的沖擊,延長電池的使用壽命,提高電網的穩定性。
3.3 船舶典型工況仿真
對電動船模型進行典型工況仿真,與被動式拓撲結構復合電源相對比,船舶典型工況負載如圖5所示,仿真結果見圖6。
由圖6a)和圖6b)可知:在90~140 s期間,半主動式復合電池的超級電容有效抑制了電池的功率輸出波動;在140~260 s期間,被動式復合電源的電池輸出功率為103.8 kW,而半主動式復合電源的電池最大輸出功率僅為73.88 kW,降低29%。由圖6c)可知:在90~140 s期間,被動式結構的母線電壓劇烈波動,波動幅度最大達到14 V;半主動式結構的最大電壓波動僅為被動式結構的15.7%。
仿真結果表明,在能量管理策略控制下,半主動式復合電源中的超級電容承擔較大的功率波動,減小動力電池的電流變化,從而延長電池的使用壽命,同時抑制船舶機動航行工況下母線電壓的波動,提高電網的供電品質。
4 結束語
本文對某型采用燃料電池和動力電池做動力源的游船進行模擬改裝,采用以動力電池、超級電容和DC/DC變換器為核心設備的半主動式復合電源做動力源。針對其典型工況負載,設計能量管理系統。仿真結果表明:所提出的半主動式復合電源拓撲結構,匹配以支持向量機、濾波器和閾值規則控制為核心的能量管理策略,能很好地適應脈沖性負載和典型工況負載,能有效減緩動力電池電流突變、延長其使用壽命;同時,能降低直流母線電壓波動,提高供電品質。