改進量子神經網絡高壓斷路器故障診斷方法研究
2018-10-17 01:45:18禹紅良左興喜楊森淋
重慶理工大學學報(自然科學) 2018年9期
張 蓮,王 磊,禹紅良,左興喜,楊森淋
(重慶理工大學 電氣與電子工程學院, 重慶 400054)
高壓斷路器是電力系統中重要的設備之一,廣泛安裝在電網中的各個部分,用于發電、輸電、配電,以控制和保護電力設備。高壓斷路器故障診斷的研究有益于電力系統的安全穩定運行。可以及時發現并排除故障,對增強高壓斷路器的工作安全性、提高使用壽命、降低維護成本、避免電網重大事故發生有重要作用。根據對高壓斷路器長期運行統計,其中機械故障占全部故障的70%~80%,因此,高壓斷路器故障診斷主要研究其機械故障[1]。隨著對高壓斷路器機械故障研究的深入,已經產生了多種診斷方法,如模糊理論、專家系統、支持向量機、BP神經網絡等[2-3]。目前普遍采用的是BP神經網絡算法,但由于BP神經網絡本身具有的缺陷,在故障診斷時會有收斂速度慢、易陷入局部極小值等問題。而量子神經網絡泛化能力、收斂速度快、分類能力較強、不存在陷入局部極小值的問題,是一種較好的故障診斷方法。
本文在量子神經網絡的基礎上,用量子進化對量子神經網絡做出改進,建立改進的量子神經網絡(improved quantum neural network, IQNN)高壓斷路器故障診斷模型,并用Matlab軟件進行仿真,仿真表明該方法較BP網絡具有更好的性能。
1 量子比特和量子門
1995年,美國Kak博士發表的一篇名為“On Quantum Neural Computing”的論文中[4],首次提出量子神經計算,確定神經網絡和量子計算兩種方法可以結合,形成一種新的計算方法,為量子神經網絡的發展奠定了基礎。量子神經網絡具有量子計算的一些特性,如:并行性、態疊加性和態糾纏性等,能使經典神經網絡并行處理能力規模更大,效率更高[5]。
1.1 量子比特
傳統計算的比特用“0”和“1”表示,相應地,在量子計算中量子比特用|0〉、|1〉表示,記號“| 〉”稱為Dirac記號,用以描述量子線路的狀態[6-7]。量子比特的狀態不僅包括|0〉、|1〉,還包括這兩種狀態的線性組合,稱為疊加態,即
|φ〉=α|0〉+β|1〉
(1)
其中α和β是一對復數,稱為量子態的概率幅,即量子態|φ〉是以概率|α|2坍縮到|0〉,或者以概率|β|2坍縮到|1〉,且

(2)
因此,量子態也可以用概率幅表示:|φ〉=[α,β]T。
1.2 受控量子旋轉門
量子門是量子計算的基礎。通過執行量子位狀態的酉變換,可以實現邏輯功能[8]。
1.2.1 量子旋轉門
量子旋轉門的定義為
(3)
若 |φ〉=[cosφ,sinφ]T,那么經過變換U(θ) |φ〉=[cos(θ+φ),sin(θ+φ)]T。這里U(θ)起到相位變換的作用,故稱為量子旋轉門。
1.2.2 受控量子旋轉門
該門有2個輸入比特,分別為控制比特和目標比特。若控制比特置0,則目標比特保持不變;若控制比特置1,則目標比特相位旋轉[9]。因此,受控旋轉門描述為:
(4)
其受控參數k取值可分為以下情況:
1) 當k=1時,使|φ〉的相位發生θ角旋轉,即C(k,θ)=[cos(θ+φ),sin(θ+φ)]T。
2) 當k=0時,此時|φ〉的相位保持不變。即C(k,θ)=[cos(θ+φ),sin(θ+φ)]T。
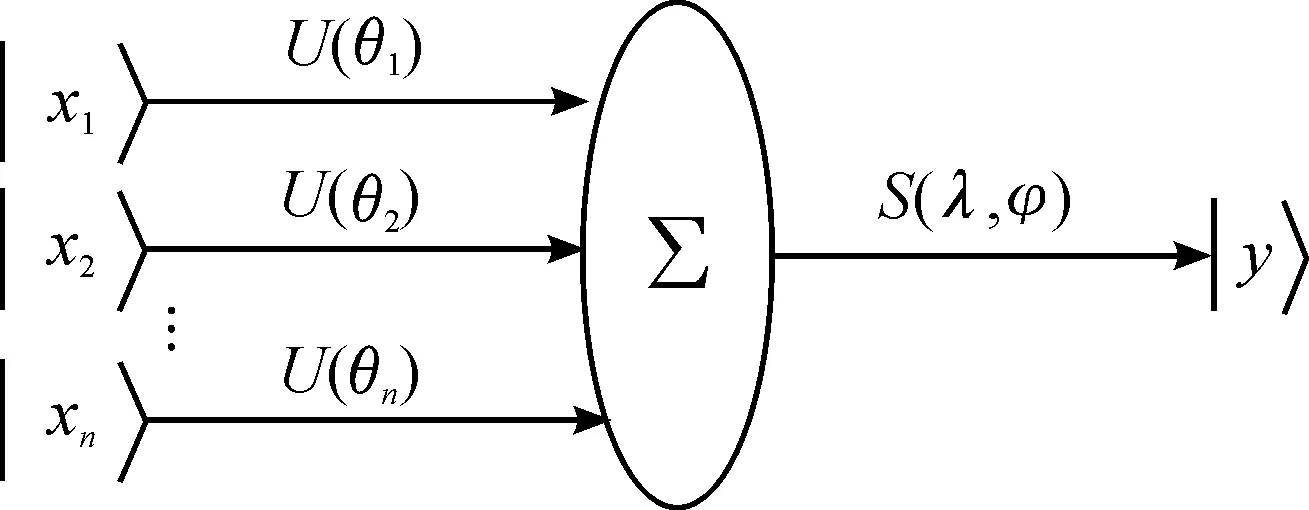
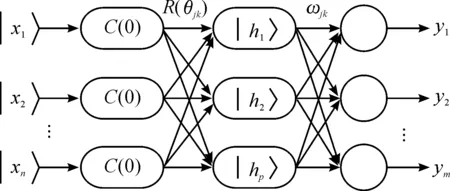
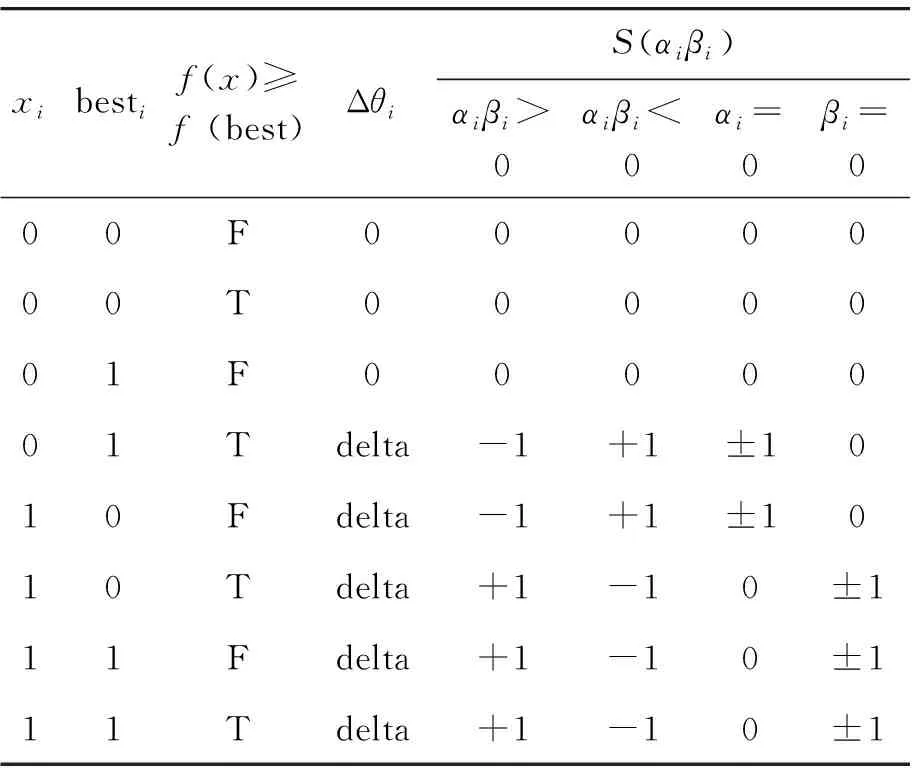
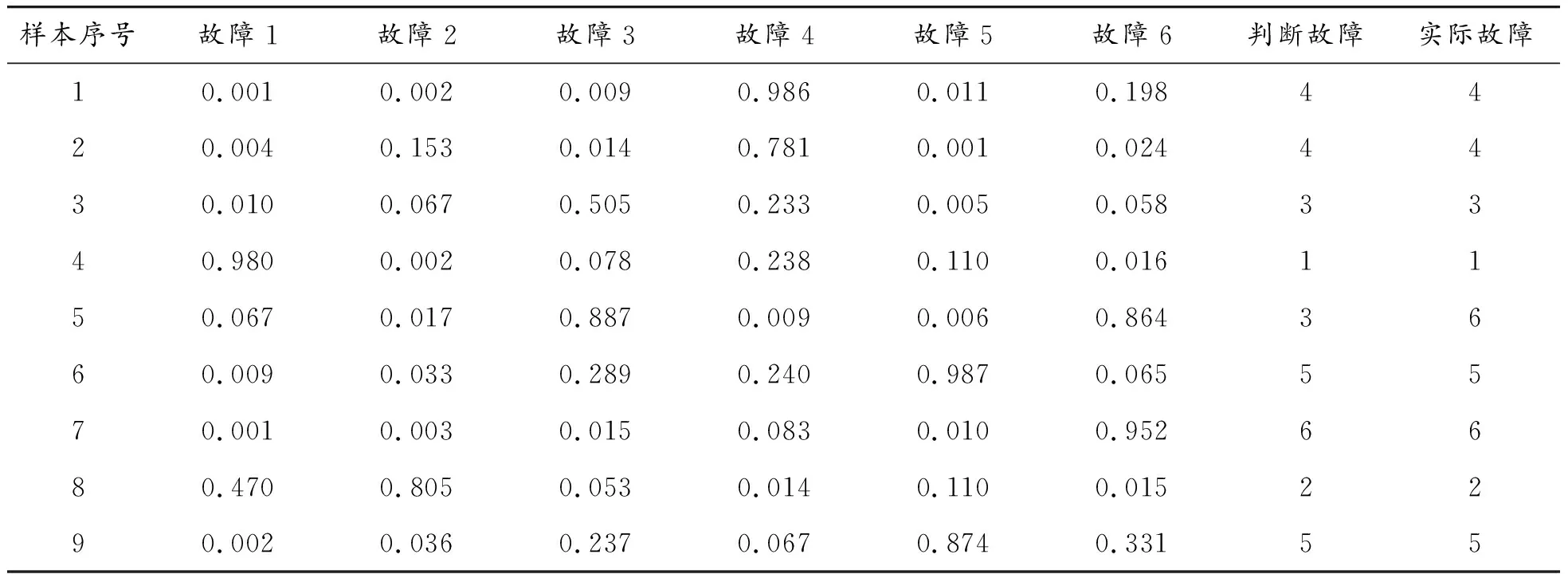
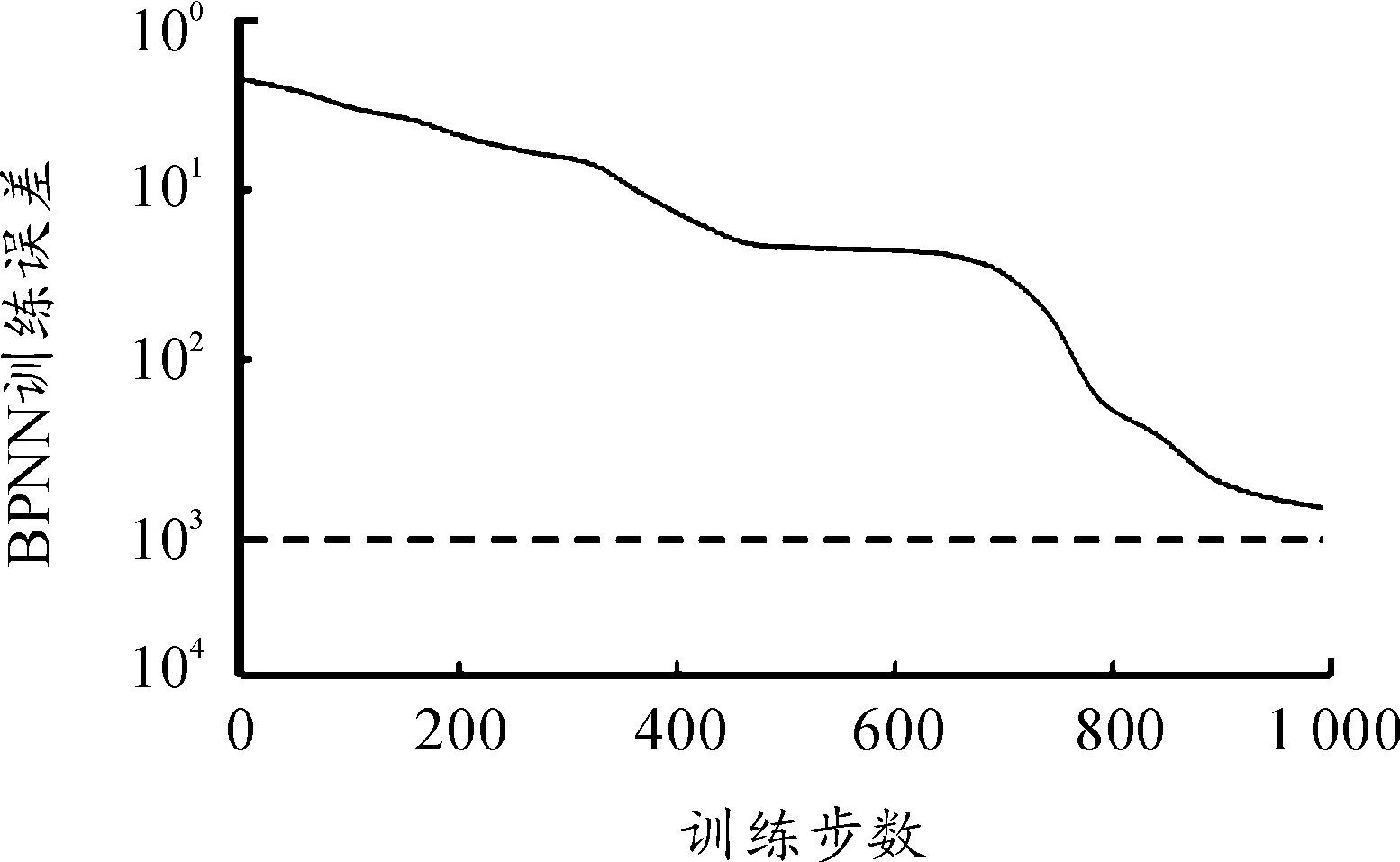
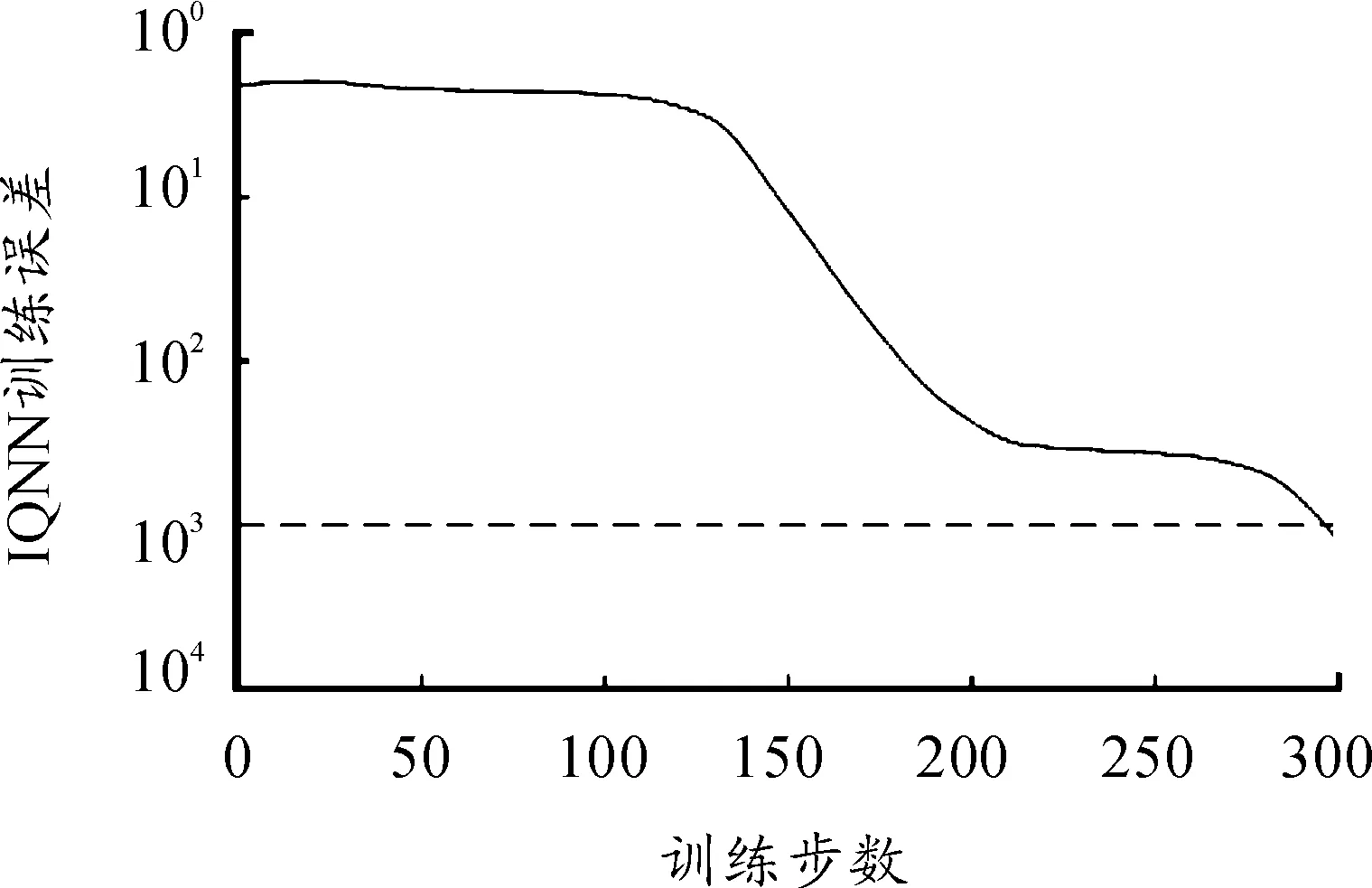
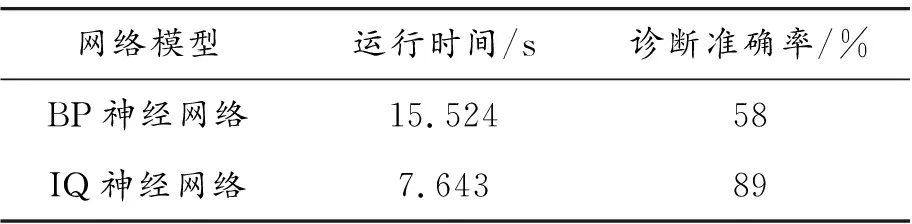
3) 當0 傳統的神經網絡神經元由兩級激勵函數(如常用的sigmoid函數)組成,借用量子理論中的量子旋轉門,構建旋轉門和受控旋轉門的量子神經元模型[10]。其輸入和輸出用量子比特表示。移相、旋轉分別用量子旋轉門U(θi)和受控旋轉門S(λ,φ)實現,其中S(λ,φ)的定義為: S(λ,φ)=C(f(λ),φ) (5) 其中:λ為受控參數;φ為相位變換大小;f(·)為sigmoid函數;函數C(·)和式(4)相同。量子神經元的模型如圖1所示。 圖1 量子神經元模型 |xi〉為輸入樣本的量子態描述,記輸入樣本向量為|X〉,則|X〉表示為: |X〉=[|x1〉, |x2〉,…,|xn〉]T (6) 其中|xi〉為 (7) 量子神經元的輸出為 [cos(θ+f(λ)φ),sin(θ+f(λ)φ)]T (8) 本文提出的受控量子旋轉門神經網絡模型由3層組成,n個輸入單元,p個隱層單元,m個輸出單元。隱含層由若干個量子神經元組成。輸出層為普通神經元,如圖2所示。 圖2 量子神經網絡模型 |x1〉,|x2〉,…,|xn〉為輸入序列,|h1〉,|h2〉,…,|hp〉為隱含層輸出,wjk為輸出層連接權,y1,y2,…,ym為網絡輸出,輸出層采用sigmoid函數作為激勵函數。 運用量子進化理論確定量子旋轉門的旋轉角度的方法如表1所示。表1中f(x)為代價函數旋轉角θi的取值: θi=S(αi,βi)Δθi 表中Δθi和S(αi,βi)表示旋轉角的步長和旋轉方向。參數delta的取值與算法收斂度有關。采用動態量子旋轉門的思想,delta的取值用式(10)確定: (10) 其中:n為迭代步數,MAXGEN為終止代數;k為[0,1]之間的常數。 (11) 代價函數越小,其模型的擬合度越好。 改進的量子神經網絡參數調整步驟如下: 3) 評估觀測態P(x)的適應度。 4) 將最佳個體保留,并判斷迭代步數是否達到最大步數,若達到,則轉至步驟 8),否則,執行下一步。 5) 根據式(9)計算量子旋轉門的旋轉角,并用式(10)中的量子旋轉門作用于種群中所有個體的概率幅并更新Q(t)。 6) 執行量子交叉操作。把種群中的所有個體隨機排序;然后對排序后所有個體循環移位,即第i位循環移位i-1次,獲得交叉操作之后的新種群。 7)進化代數加1,進行量子變異,生成Q(t+1),判斷進化代數是否未達到最大迭代次數,若不滿足則轉至步驟2),否則轉至步驟8)。 8) 用梯度下降法繼續訓練網絡,精確調整神經網絡的權值和閾值,直到滿足訓練精度。 不同的特征信號反映高壓斷路器不同的故障信息,故特征信號的選擇直接影響故障診斷的準確性。高壓斷路器的分合閘線圈是用來驅動斷路器分合閘的,直接反映斷路器的動作狀態,加之流經分合閘線圈的電流是直流電,所以一般選擇分合閘線圈電流為特征信號之一。分合閘線圈電流波形中包含了許多信息,其操作時分閘線圈電流波形圖如圖3所示。 圖3 分閘線圈波形 根據鐵芯的運動過程,分閘線圈電流一般分為5個階段[11]:t0~t1階段,鐵芯保持靜止,電流從t0呈指數增長;t1~t2階段,鐵芯開始加速,電磁力做功,線圈電流減小;t2~t3階段,在t2時刻,鐵芯停止運動,線圈電流又呈指數增大,該階段是傳動系統的帶動下分斷和閉合斷路器觸點的過程;t3~t4階段,電流接近穩態;t4~t5階段,電流斷開,但輔助開關的觸頭間會產生電弧,電流下降,直至電弧熄滅。 (12) 對斷路器的溫度T進行檢測以確定是否存在不良接觸。測量線圈兩端的電壓可以反映電磁鐵和操作回路的工作狀態。因此,本文將提取斷路器的分合閘線圈電流有效值、電流時間、線圈兩端的電壓、動觸頭的平均速度、控制箱內的溫度等5個特征作為模型的輸入向量。 基于改進量子神經網絡對斷路器故障診斷主要分為訓練和診斷2個階段,其主要步驟如下: 1) 將樣本歸一化,量子描述后形成訓練樣本集和測試樣本集,輸入故障診斷模型。 2) 設置相應的參數,用量子進化算法對網絡進行訓練,得到故障診斷模型。 3) 利用得到的故障診斷模型,對待測試的樣本進行診斷。 4) 得到診斷結果。 本模型的特征輸入信號的選取如表2所示。 表2 特征信號 將特征輸入量對應的故障類型作為診斷模型的輸出量,選取的輸出量為機構正常、操作電源故障、合閘鐵芯開始階段有卡澀、分合閘線圈短路、鐵芯空行程過大和輔助開關動作接觸不良等,對應的輸出編碼分別為(100000)(010000)(001000)(000100)(000010)和(000001),如表3所示。 表3 故障類型 本文選取34組故障數據,隨機抽取25組作為模型的訓練學習樣本,剩余的9組作為測試樣本。選擇的特征向量長度為5,因此對應的輸入神經元個數n為5。有6種故障狀態輸出,所以對應的輸出神經元數m為6。經過多次實驗對比IQNN的隱含層節點數p選擇10。 經過訓練樣本對改進的量子神經網絡訓練之后,用測試集驗證診斷模型的精度,得到的故障診斷結果如表4所示。 表4 實驗結果和期望結果 從表4中可以看出:該診斷模型能對測試樣本做出比較準確的判斷。其中除了樣本2、3、6外,判斷故障的輸出值都大于0.8,能很明確地判斷出故障類型。樣本3故障輸出值中最大值為0.505,雖然相對于0.8比較小,但是該值遠大于其他值,所以能判斷故障類型為3號。對樣本6的判斷出現錯誤。 為了驗證該模型的性能,同時采用原始的BP神經網絡與之對比。采用這2種方法對同一樣本集訓練,得到的仿真結果如圖4、5所示。圖4為BPNN 訓練誤差曲線,圖5為IQNN訓練誤差曲線。從圖4中可以看出:BP神經網絡的訓練步數達到1 000步時,還沒有達到所要求的誤差精度。圖5中IQNN的訓練步數為300時,達到訓練所要求的精度。可以看出:改進的量子神經網絡在相同的訓練精度下,訓練步數大幅減少。 圖4 BPNN訓練誤差曲線 圖5 IQNN訓練誤差曲線 用BP神經網絡和改進的量子神經網絡對高壓斷路器進行故障診斷,得到兩種模型的運行時間和診斷準確率的對照表,如表5所示。 表5 BP網絡和IQNN診斷結果 從仿真實驗結果可以看出:改進的量子神經網絡高壓斷路器故障診斷模型在運行時間和診斷準確率上均優于傳統的BP神經網絡。 通過采用基于量子優化的量子神經網絡對高壓斷路器進行故障診斷,利用分合閘線圈電流曲線和箱內溫度等特征信號對模型訓練后,可以準確判斷出高壓斷路器操作機構的運行情況。仿真結果表明,改進的量子神經網絡與目前傳統的BP神經網絡相比具有明顯的優越性:訓練步數短、故障診斷準確率高、很少陷入局部極小值,可以有效診斷高壓斷路器的機械故障。2 量子神經網絡
2.1 量子神經元
2.2 量子神經網絡模型
2.3 改進的量子神經網絡參數調整步驟

3 基于量子神經網絡的高壓斷路器故障診斷模型
3.1 特征信號的提取
3.2 故障診斷的步驟
3.3 高壓斷路器故障診斷模型的輸入和輸出
4 實驗仿真與分析
5 結束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
裝備制造技術(2020年3期)2020-12-25 05:22:30
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2016年6期)2016-11-16 01:50:43
光學精密工程(2016年6期)2016-11-07 09:07:19
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
核科學與工程(2015年4期)2015-09-26 11:59:03
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
