一種基于Harris角點(diǎn)檢測(cè)的表格文檔直線交叉點(diǎn)提取優(yōu)化算法
2018-10-17 08:57:40
福建質(zhì)量管理 2018年18期
關(guān)鍵詞:實(shí)驗(yàn)檢測(cè)
(廣東工業(yè)大學(xué) 廣東 廣州 510006)
角點(diǎn)被普遍認(rèn)為是二維圖像亮度變化劇烈或者圖像邊緣曲線上曲率極大值的點(diǎn)[1]。角點(diǎn)檢測(cè)廣泛應(yīng)用于特征提取、圖像拼接、形狀分析、圖像匹配(FPM特征點(diǎn)匹配)、相機(jī)標(biāo)定等領(lǐng)域。目前,角點(diǎn)檢測(cè)技術(shù)可以分為兩類:一種是基于圖像灰度的方法,如Susan算法[2],Harris算法[1]等;另一種基于輪廓的方法,如Kitchen算法[3]。第一類算法對(duì)噪聲比較敏感,存在檢測(cè)精度和準(zhǔn)確率的缺點(diǎn)。第二類算法比較依賴邊緣線,魯棒性不高。
本文針對(duì)表格文檔的交叉點(diǎn)特征提取,對(duì)Harris角點(diǎn)檢測(cè)算法進(jìn)行優(yōu)化,將計(jì)算灰度變化的矩形窗口函數(shù)改為十字形窗口函數(shù),減少了計(jì)算量,提高了交叉點(diǎn)的檢測(cè)精度和準(zhǔn)確率。通過實(shí)驗(yàn)對(duì)改進(jìn)后算法進(jìn)行驗(yàn)證。
一、Harris角點(diǎn)檢測(cè)算法
Harris算法原理是計(jì)算圖像窗口W沿任意方向移動(dòng)后的計(jì)算灰度變化。設(shè)以像素點(diǎn)(x,y)為中心的小窗口在X和Y方向上移動(dòng)分別u和v,則灰度變化量解析式為:
將Ex,y化為二次型:Ex,y=[u,v]M[u,v]T
定義角點(diǎn)響應(yīng)函數(shù)R(x,y)=det(M)-k(trace(M))2
其中,det(M)為矩陣M的行列式,trace(M)為矩陣的跡,k為經(jīng)驗(yàn)值,一般取0.04。當(dāng)目標(biāo)像素點(diǎn)的R值大于給定閾值時(shí),則該店像素點(diǎn)為角點(diǎn)。
二、優(yōu)化的Harris角點(diǎn)檢測(cè)算法
為了提高Harris算法對(duì)表格交叉點(diǎn)的檢測(cè)精度和效率,本文對(duì)計(jì)算像素點(diǎn)矩形鄰域用到的窗口函數(shù)wx,y改進(jìn)為十字形窗口函數(shù)wx,y。如圖1所示,原始算法使用9*9的矩形窗口函數(shù),改進(jìn)后算法使用同等規(guī)格的十字形窗口函數(shù)。圖中每個(gè)小格代表一個(gè)像素點(diǎn),黑色格子表示目標(biāo)像素點(diǎn),白色格子代表鄰域像素點(diǎn)。
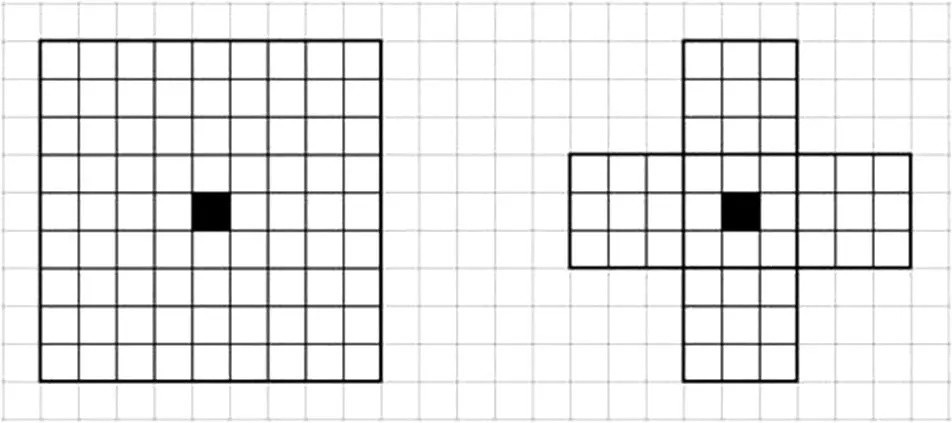
圖1
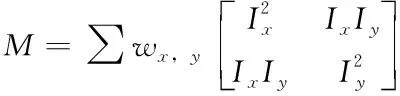
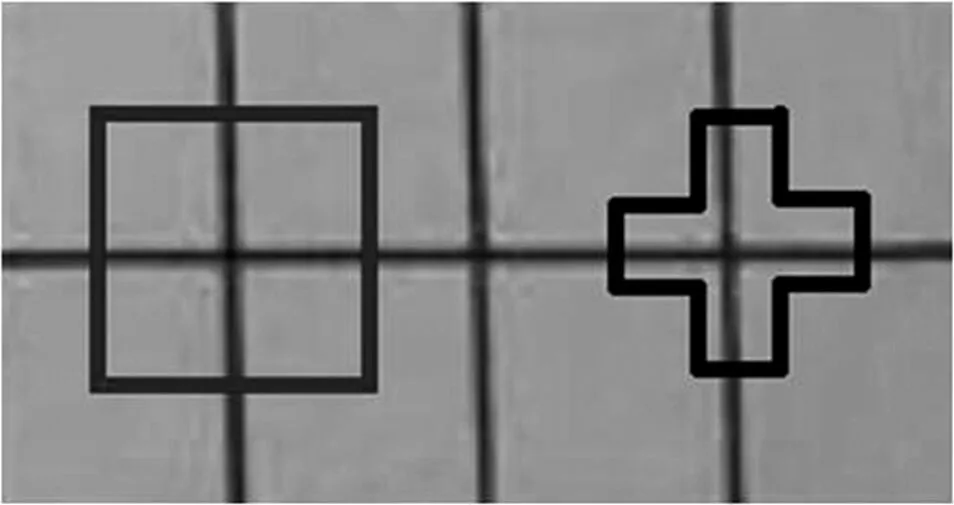
圖2
三、實(shí)驗(yàn)結(jié)果及分析
為了驗(yàn)證本文改進(jìn)算法的有效性,利用表格圖片進(jìn)行驗(yàn)證。本實(shí)驗(yàn)中,在PC(Intel(R)Core(TM)i5-4200M CPU @ 2.50GHz、4.0GB內(nèi)存)機(jī)上用Visual Studio 2012進(jìn)行實(shí)驗(yàn)。窗口分別取9*9矩形窗口和與之對(duì)應(yīng)的十字形窗口。實(shí)驗(yàn)結(jié)果如下:
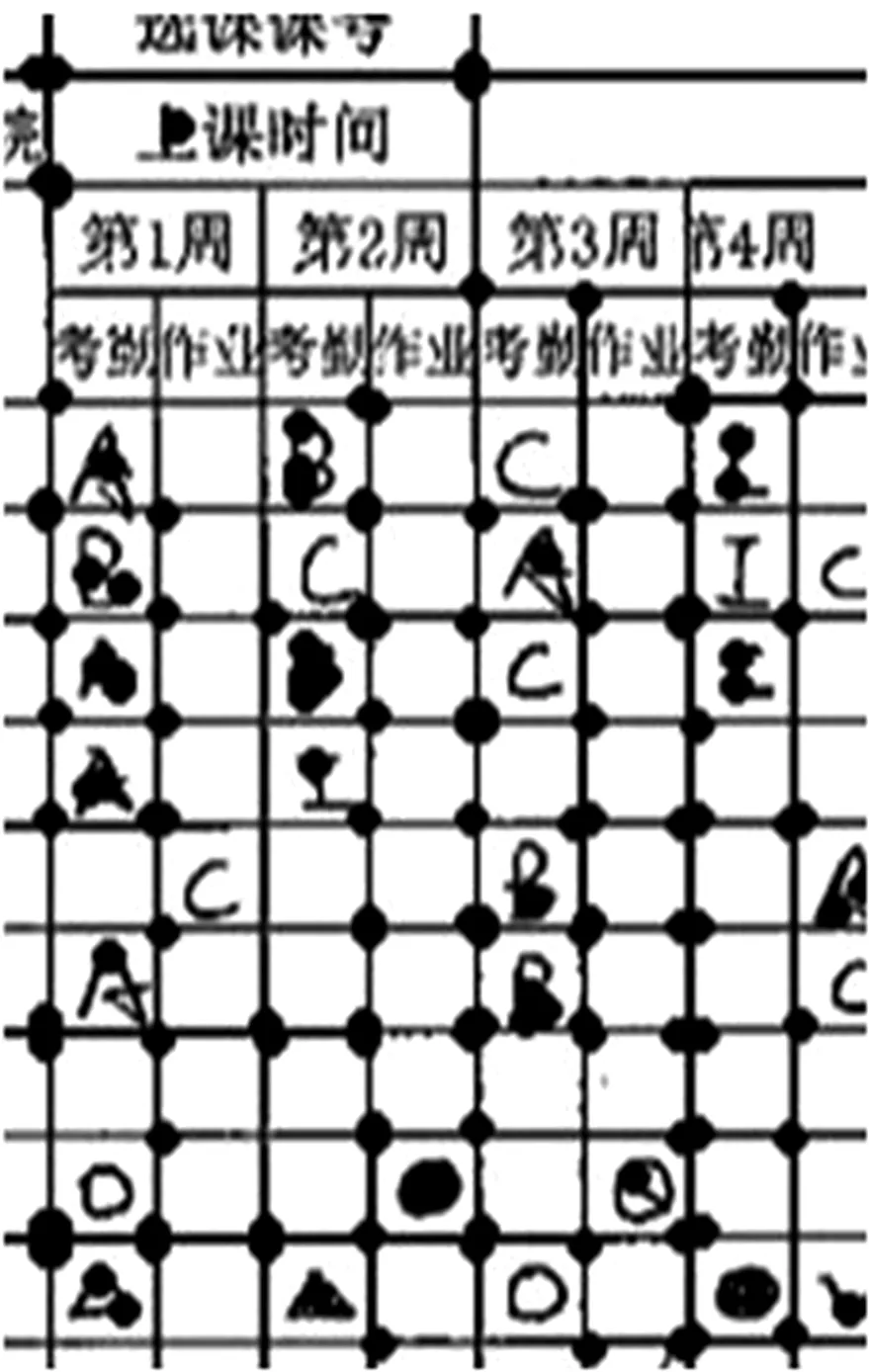
圖3 矩形窗口

圖4 十字形窗口
由實(shí)驗(yàn)結(jié)果統(tǒng)計(jì)可得下表1:

表1 實(shí)驗(yàn)結(jié)果對(duì)比
由表可知,改進(jìn)后的Harris算法有更高的精度和更高的準(zhǔn)確度。原始算法易受表格文字的干擾而出現(xiàn)很高的誤檢率,而改進(jìn)后的算法魯棒性更強(qiáng)。
四、結(jié)論
原始的Harris算法易受表格文字等干擾而存在誤檢率高的缺陷。通過將窗口函數(shù)修改為十字形窗口,更好地?cái)M合表格直線交叉點(diǎn)的特征,提高了表格交點(diǎn)的檢測(cè)精度和準(zhǔn)確率,并且降低了文字等噪聲的干擾,具有更好的魯棒性。實(shí)驗(yàn)證明了本文方法的有效性和準(zhǔn)確性。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
