基于高精度相頻同步的節點端無損切換技術研究
2018-10-18 10:31:38,,,
計算機測量與控制 2018年10期
,, ,
(1.中國電子科技集團公司第五十四研究所,石家莊 050081; 2.中國人民解放軍63771部隊,陜西 渭南 714000)
0 引言
基于光纖的高精度時頻同步在雷達、測控、通信、導航等領域已得到廣泛應用,傳統點對點光纖時頻同步由于設備復雜、價格昂貴、復用性差等原因,已無法滿足分布式、網絡化的裝備發展需求,因此現階段需要開展網絡化、高精度、高抗毀的光纖時頻同步技術研究[1-2]。對于層次化多節點時頻同步系統,簇節點具有多輸入多輸出的特征,其接收到的信號來自同一個信號源,但是由于傳輸環境、傳輸距離、中繼節點等方面的差異,其不同路徑所接收到的時頻信號質量不盡相同,而如何對其甄別、分析、融合,實現簇節點高精度時頻信號的相位同步和無損切換是系統的關鍵技術。
以往的研究集中于源端的信號無損切換[3-4],相比源端,簇節點端信號不具有高精度時頻基準,且由于信號來源的不確定性,其誤差因素更大更為復雜,本文提出了一種基于相位漂移的簇節點單源多路徑無損切換方法,在保證重要節點時頻同步精度的前提下提高了系統穩健性,并最終通過仿真實驗驗證了該方法的可行性。
1 簇節點端信號的分析甄別
相比源端,簇節點端多輸入信號的處理甄別以及切換的難度更大,這是由于簇節點端接收到的信號數目更多,信號質量更加難以保證。如何在有限的條件下對簇節點端所有的輸入信號進行分析甄別,從而選取主備路信號就變得尤為復雜。
1.1 節點端信號甄別限制因素
表1列出相應簇節點端與源端信號分析甄別限制因素對比[5-7]。
信號的質量通過其頻率準確度和穩定度來體現,信號頻率準確度指的是信號輸出值偏離標稱值的程度[2],定義式為:
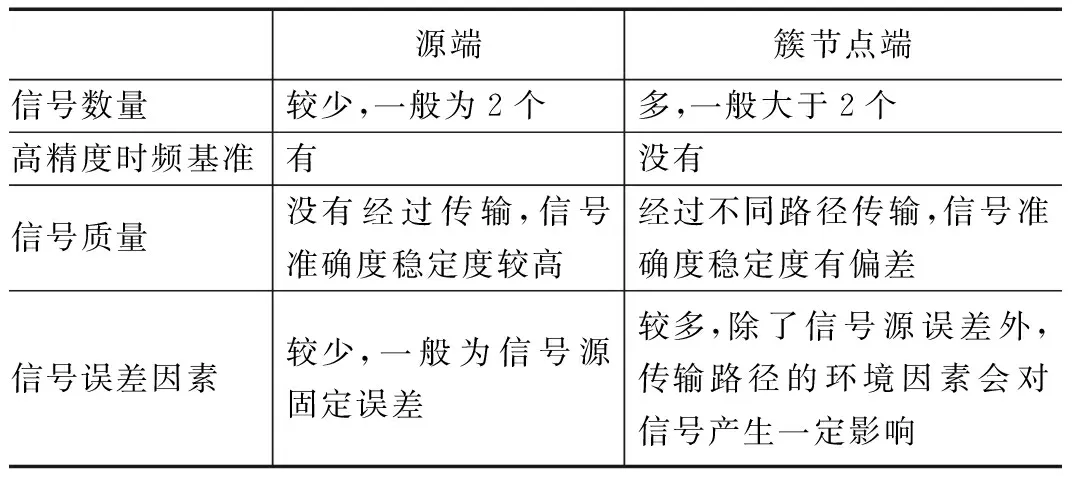
表1 限制因素對比
(1)
其中:f0表示信號頻率標稱值,f表示信號頻率實際輸出值。
信號頻率穩定度表示信號一定時間內平均頻率隨時間的變化量[1],與系統隨機噪聲及采樣時間相關,用阿倫方差表示,
(2)
其中:τ為采樣時間,M為采樣時間內采集的數據數目,yi表示頻率測量值。
由以上分析可得:信號頻率準確度的測量需要高精度時頻基準提供頻率標稱值,而簇節點端并沒有高精度時頻基準,這也就導致了簇節點端信號準確度無法直接測量;信號頻率穩定度與系統隨機噪聲及采樣時間相關,相比源端,簇節點端由于信號傳輸的原因會引入隨機噪聲,這些因素的存在會導致相比源端簇節點端信號穩定度偏差,同時采樣時間的存在會導致穩定度測量無法實時達成,且穩定度測量分短穩和長穩,短穩的采樣時間都是秒量級的,直接進行穩定度分析無法滿足系統實時性的要求。
1.2 節點端光路徑誤差分析
分析信號的傳輸過程,光纖傳輸鏈路中引入的光路時延可以表示為:
(3)
其中:n為光纖材料折射率,c為真空光速,L為光纖長度,可以看出,光纖長度確定的情況下,不考慮其他誤差因素,光纖傳輸鏈路中引入的光路時延為一個確定值。信號傳輸過程中誤差因素的存在會使光路時延產生抖動,引入時延誤差Δt0,以相位誤差Δφ0的形式體現在傳輸信號上。
Δφ0=2πf0Δt0
(4)
1)溫度
溫度主要是對光纖長度和折射率產生影響,這種影響是近似線性的,故而這里引入光纖溫度系數的概念,它是指溫度變化1℃的情況下,光線折射率與其長度乘積的線性變化率,具體到石英單模光纖,其溫度系數為7×10-6左右[8],故而溫度因素對于系統相位的影響可以表示為:
(5)
其中:T(t)表示溫度變化,Q表示溫度系數。
2)激光器和色散因素
激光器的作用是產生載波光信號,受環境因素影響,激光器產生的光信號會有微小的隨機抖動,產生相位噪聲;色散的存在導致光纖中不同頻率光信號傳播速度不同,產生時延抖動,進而發展成為相位噪聲。
激光器產生的載波光信號瞬時時延抖動[9]可以表示為:
dX(t)=HLdλ
(6)
其中:H指光纖色散系數,L指信號傳輸的距離,λ指的是載波光信號的波長。
由于:
φ(t)=2πf0X(t)
(7)
c=f0λ0
(8)
可得相位抖動:
(9)
其他比如由于遠距離光纖傳輸引入的摻鉺光纖放大器(EDFA)中繼、外部強度噪聲等因素[10-11]的影響不再一一論述,通過分析上述因素的影響,可以看到無論是溫度還是激光器和色散等因素,都與傳輸的距離相關。在不考慮中繼節點的情況下,本文進行了10 m,20 m和50 m光纖的光載微波信號傳輸實驗,實驗結果顯示相同條件下傳輸穩定度與傳輸距離正相關。故而本文采取的主備路選取方式是首先選取傳輸距離短,中繼節點少的傳輸路徑作為主路信號,傳輸過程中不斷對主備路信號積累的傳輸數據進行分析整合,計算其相應的阿倫方差,當數據數量增多之后,根據其阿倫方差的大小判斷主備路信號實時性能,作為無損切換的依據。
2 無損切換原理
H0=hcos(2πf0t+φ0)
(10)
經過不同鏈路傳輸,其最終輸入該節點的信號為:
Hn=(h+Δhn)cos(2πf0t+φ0+φn(t))
(11)
式中,Δhn表示第n條傳輸鏈路引入的幅度變化,由于幅度改變并不影響時頻傳輸特性,故而可以忽略不計。φn(t)表示第n條傳輸鏈路引入的相位變化。傳輸鏈路φn(t)的引入會導致信號頻率發生一定的改變。
(12)
由于其相頻變化是時間的函數,所以當時間確定時,第n條傳輸鏈路引入的相位變化φn(t)就會是一個確定值,而其相位變化率同樣也是一個確定值。時間確定時,兩條傳輸鏈路會有一個確定的相位差和一個確定的相位變化率差。而在這個確定的時間進行信號切換,相位和相位變化率會產生跳變,進而引入相應的頻率、相位跳變誤差,影響傳輸信號性能。不同于一般系統,網絡化高精度時頻同步系統的傳輸精度較高,對于頻率、相位跳變指標要求較高,其要求切換前后相位跳變維持在皮秒量級,相應的頻率跳變應維持在10-13量級。以10 M傳輸信號為例,若相位跳為1°,則兩者相應的時間差維持在:
(13)
可以看出,即使兩者的相位差只有1°,其相應的時間差也有接近300 ps的差距。為了保證系統較高的精度要求,必須保證切換時主備路相頻差足夠小,也就是說,必須保證主備路相位頻率的同步精度。
3 無損切換技術基礎
3.1 主備路相頻精確同步
由上述分析可知,對于同源傳輸信號,其源端可以用公式(10)表示,經過不同傳輸鏈路,受到不同的干擾,其主備路信號可以用下式表示:
H1=(h+Δh1)cos(2πf0t+φ0+φ1(t))
(14)
H2=(h+Δh2)cos(2πf0t+φ0+φ2(t))
(15)
式中,H1表示主路信號,H2表示備份路信號。主備路信號之間的差別集中體現在引入的相位噪聲φ1(t)和φ2(t)的差別,也就是主備路信號的相差和頻差上。
此外,設計人員還要加強室內通風,提升建筑通風效果。在實際設計工作當中,設計人員要加強對衛生間與廚房的通風設計,保證廚房與衛生間的通風效果得到全面提高。在建筑室內通風設計過程之中,設計人員還要綜合考慮到室內通風效果,盡可能的減少室內裝飾對通風系統產生的遮擋,在保證建筑室內通風效果的基礎之上,保證建筑室內通風結構得到全面優化,保證建筑室內通風能夠滿足通風換氣要求。
由于主備路信號同源,其初始頻率相同,忽略幅度影響,將上式主備路信號混頻,得到混頻信號:
T=cos(2πf0t+φ0+φ1(t))×
cos(2πf0t+φ0+φ2(t))
(16)
積化和差處理以上混頻信號,整理得:
(17)
觀察上式,混頻信號可以整理為一個高頻信號和一個低頻信號之和的形式,而低頻信號的相位,即為要測量的相差,其頻率即為要測量的頻差,可以表示為:
(18)
換言之,混頻信號中的高頻項是無用的,將該混頻信號通過一個低通濾波器,濾去混頻信號中的高頻分量,得到只含有cos(φ1(t)-φ2(t))項的信號量,也就可以得到相應時間點對應的頻差相差。
精確測量主備路信號相位誤差的目的就是以主路信號為參考,將備份路信號進行相位同步,有效減小切換過程中產生的跳變。主備路相位同步簡單框圖如圖1所示。
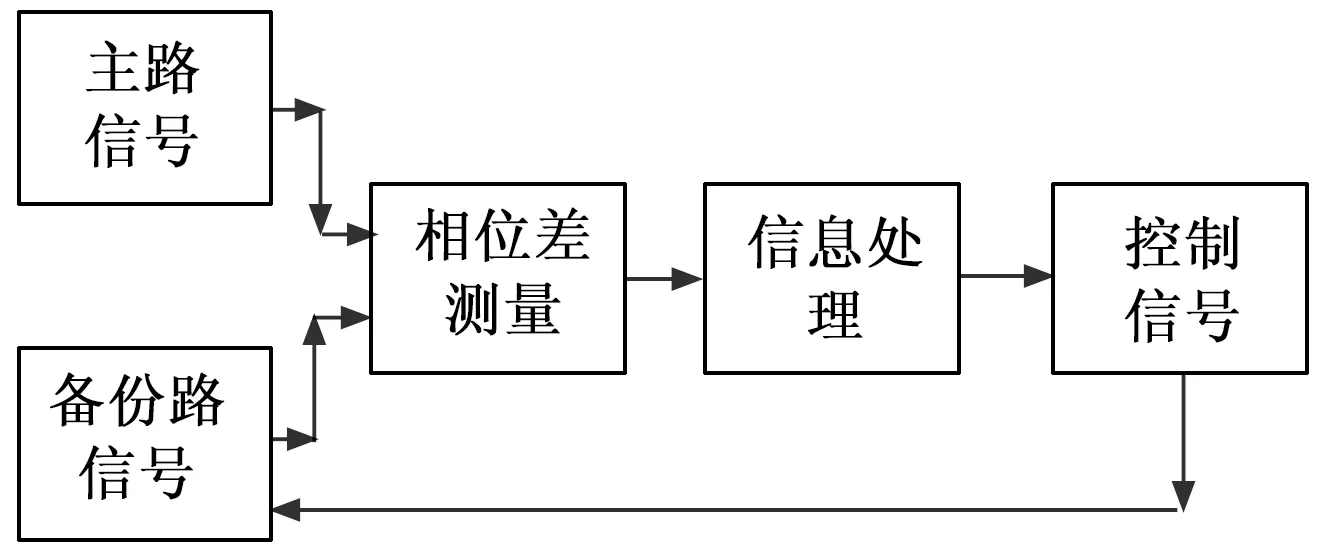
圖1 主備路相位同步原理圖
很明顯,控制信號控制的是備份路信號,目的是改變備份路信號的相位信息,使其頻率相位最大程度上與主路信號保持一致。本文中,備份路相位信息的調制通過引入壓控移相器來完成,其控制電壓與相差信息成正比。理論上這種方法可以將備份路信號相位與主路信號相位頻率精確同步,然而包括測量誤差、系統誤差等各種因素的存在難免會影響同步結果。本文通過調節壓控移相器參數、預留誤差余量、加入恒溫壓控振蕩器(VCXO)等方式有效減小了誤差因素的影響,提升了系統整體性能。
3.2 切換開關的設置
主備路相位的精確測量與同步的目的是減小切換過程中相位跳變產生的沖擊,然而這只是在信號處理層面的處理,操作層面的誤差并沒有得到有效地抑制。
具體到操作層面,無損切換的具體操作是由開關完成的,而切換時間和隔離度是開關的兩個重要指標,顯而易見,為了減小由于切換引入的誤差,開關的切換時間越短越符合系統對精度的要求;隔離度越高越能滿足系統穩健性的需求。然而在實際應用中,以高速電子開關為代表的開關切換速度快隔離度差,而以繼電器為代表的開關隔離度高切換速度慢,這直接導致了無損切換開關的隔離度與切換時間無法兼顧。而如何權衡切換時間和隔離度設計切換開關,也是信號無損切換需要考慮的問題。
本文以前的源端無損切換研究多是犧牲系統隔離度選擇切換速度高的高速電子開關[3-4],這種選擇優勢明顯:減小了開關的響應時間,保證了系統的切換精度。然而這種選擇依然存在無法忽視的缺陷,那就是其隔離度較低,并不適合切換后系統的傳輸保持。為了解決這一問題,本文采用高速電子開關與繼電器開關并聯的方式保證開關系統的切換速度與隔離度。具體切換時,高速電子開關率先進行切換保證切換系統的切換速度,高速電子開關切換完成后,與之并聯的繼電器開關開始切換,在其切換完成后作為高速電子開關的備份保證整個系統的隔離度。
4 系統設計與仿真
基于上文原理分析,本文設計的簇節點端單源多路徑系統無損切換簡單原理如圖2所示。
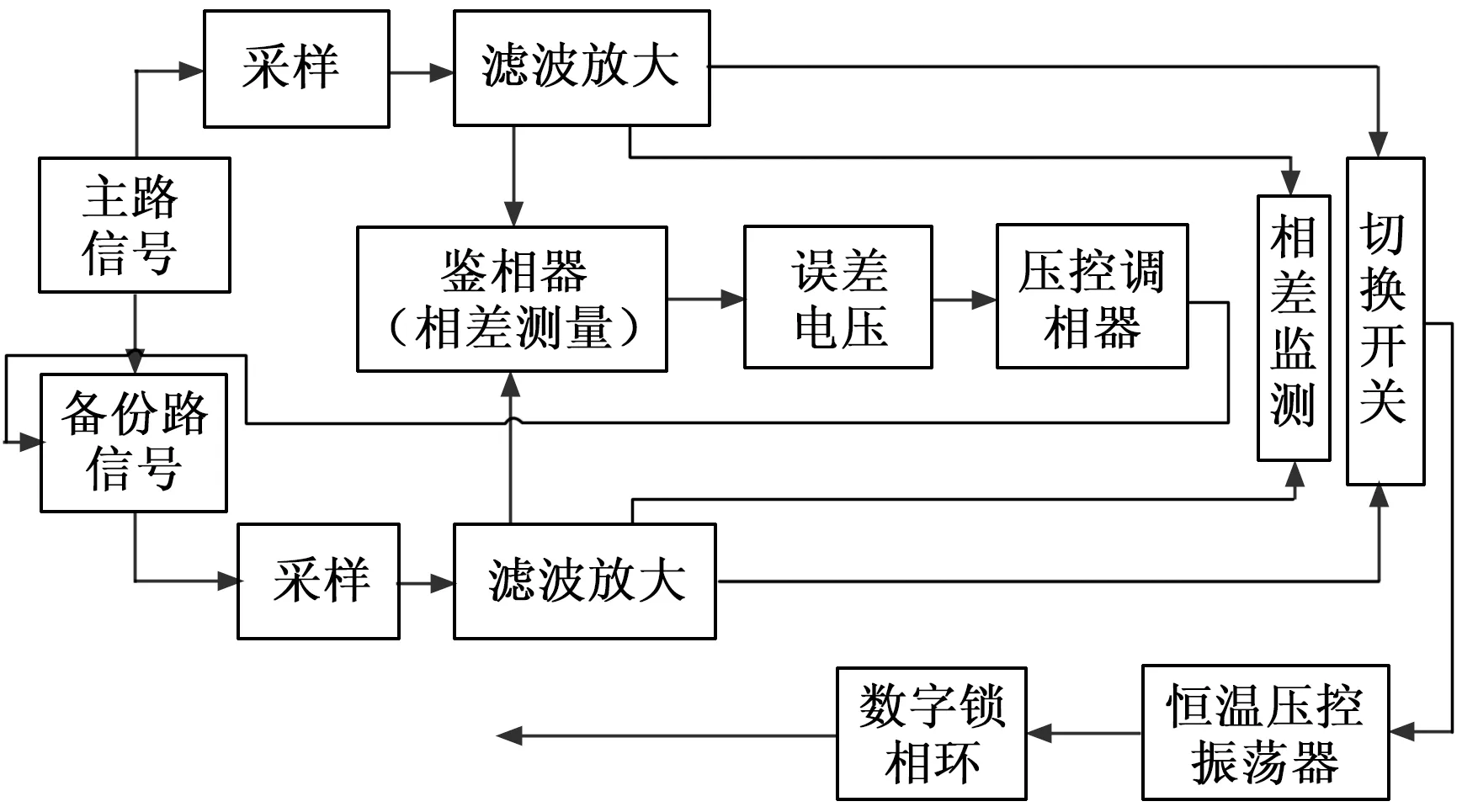
圖2 系統整體原理簡圖
4.1 仿真系統設計
根據上文原理簡圖設計相應的仿真方案,不同于以往理論性單一研究,本文充分考慮光纖時頻傳輸特性,做了不同條件下的簇節點無損切換仿真。以傳輸信號信噪比為例,由于本文時頻信號的傳輸介質是光纖,誤差因素較小,故而仿真所選取的信號信噪比都較高。固定條件方面,選取源信號頻率為10 MHz,高速電子開關響應時間在ns量級,為了更加直觀地觀測系統對于主備路頻率相位同步的精確度,這里選取的主備路初始頻差相差較大,如選取的主備路信號初始頻差在量級,初始相差不小于pi/6。綜上,本文設計了以下四組仿真實驗。
1)信噪比為70 db,主備路初始頻差+10 μHz,初始相差pi/6。
2)信噪比為50 db,主備路初始頻差+10 μHz,初始相差pi/6。
3)信噪比為70 db,主備路初始頻差-10 μHz,初始相差pi/6。
4)信噪比為70 db,主備路初始頻差+10 μHz,初始相差pi/3。
以上設計的四組仿真實驗中,明顯可以看出,第一組是整體實驗的標尺,后三組仿真實驗是參照第一組實驗數據采用控制變量的方法設計的,其與第一組實驗對比,分別觀察信噪比、主備路初始頻差、初始相位差對無損切換系統的影響。
4.2 仿真結果分析
根據上文4組仿真實驗設計進行相應仿真,得到仿真實驗如圖3所示。
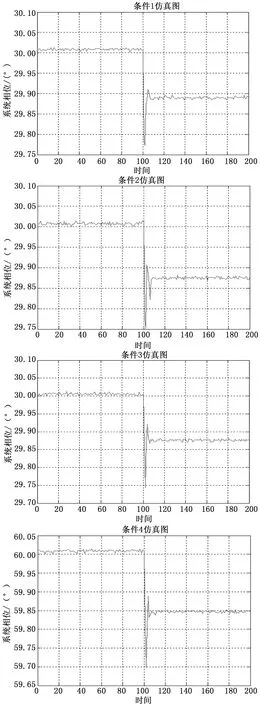
圖3 仿真結果圖
圖3中的仿真圖的切換時刻均為100。由于本次試驗目的是觀測信噪比、主備路初始頻差、初始相位差對無損切換系統的影響,故而4組實驗初始時刻主備路相位已基本同步,備份路信號基本穩定。從仿真結果圖可以看出4組仿真主備路相位同步精度均在0.11~0.15°左右,折合到時間兩者時差約在30~40 ps之間,考慮到本文為了更好地觀測實驗結果,人為選取了較大的主備路初始相差和初始頻差,對相位同步精度造成了一定的影響,30 ps的同步精度是可以接受的。
觀察以上仿真結果,運用控制變量法可以得出以下實驗結論:
1)比較條件1和條件2的仿真圖,可得在主備路初始頻差相差相同的情況下,信噪比不同并不能明顯影響相位同步精度,但總體來說信噪比高的條件1同步精度略高于條件2。信噪比主要影響系統的相位穩定度,從圖中可以明顯看出,信噪比較低的條件2信號穩定度低,產生沖擊信號后恢復較困難。
2)比較條件1和條件3仿真圖,可以看出主備路初始頻差對相位同步精度影響不大,這是因為頻率偏差量經過時間的積累會以相位差的形式顯現,而系統鑒相、調相功能時刻進行,加之主備路頻差本身只在量級,有限時間內積累的相差有限,并不會對主備路相位同步造成明顯影響,也就不會對切換過程造成明顯誤差。
3)比較條件1和條件4仿真圖,可以看出初始相差加大對系統同步精度影響較大,從數據即可看出,條件1的相位同步精度為左右,而條件4的相位同步精度卻只有左右,相位同步精度的降低一定程度上也影響了無損切換的性能,比較兩圖的切換過程,條件4切換過程產生的沖擊誤差較大,恢復時間較長。
5 結束語
本文設計了一種簇節點端單源多路徑無損切換方案并進行了相應的仿真實驗,對比不同條件下的仿真數據得出了不同條件對單源多路徑無損切換的影響。主備路相位同步方面,傳輸信號頻率選取10 MHz,初始相差頻差選取較大的前提下,相位同步精度達到以下,達到ps量級的要求,有效抑制了無損切換過程中產生的相位躍變,對節點端無損切換乃至信號融合方面具有很大的借鑒意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25