基于自抗擾理論的PMSM 電流環(huán)控制算法
2018-10-20 06:56:58王福欣郜世杰
關(guān)鍵詞:模型設(shè)計(jì)
王福欣, 郜世杰
(1.上海船舶運(yùn)輸科學(xué)研究所航運(yùn)技術(shù)與安全國(guó)家重點(diǎn)實(shí)驗(yàn)室,上海200135;2.海軍駐廣州地區(qū)軍事局,廣州510000)
0 引 言
永磁同步電機(jī)(Permanent Magnet Synchronous Motor,PMSM)伺服控制系統(tǒng)一般采用三閉環(huán)結(jié)構(gòu)(即速度環(huán)、位置環(huán)和電流環(huán)),其中電流環(huán)作為最內(nèi)環(huán)結(jié)構(gòu),用來(lái)保證定子電流對(duì)電流指令的快速準(zhǔn)確跟蹤,其控制性能直接影響著位置環(huán)和速度環(huán)的控制性能,對(duì)于整個(gè)電機(jī)的控制而言具有重要作用。目前在PMSM的磁場(chǎng)定向控制中,通常采用比例-積分-微分(Proportion-Integral-Derivative,PID)控制器分別對(duì)旋轉(zhuǎn)坐標(biāo)系的d軸和q軸進(jìn)行控制,控制過(guò)程簡(jiǎn)單,容易得到實(shí)踐[1]。
隨著電路電子技術(shù)的發(fā)展,PID控制器在控制電流方面逐漸暴露出電流波動(dòng)性較大、抵抗擾動(dòng)的能力較差和穩(wěn)定性不足等問(wèn)題。近年來(lái),越來(lái)越多的電流控制算法被提出。例如:文獻(xiàn)[1]提出雙PI解耦控制的方法,可提高控制器的魯棒性,但雙PI參數(shù)眾多,很難調(diào)節(jié)到最優(yōu);文獻(xiàn)[2]提出用前饋解耦控制代替電流反饋解耦控制,可消除電流誤差,提高跟蹤性能,但受電機(jī)參數(shù)的準(zhǔn)確度影響,魯棒性較差;文獻(xiàn)[3]提出用模糊PID控制器代替?zhèn)鹘y(tǒng)的電流環(huán)PID控制器,可解決參數(shù)實(shí)時(shí)整定的問(wèn)題,但模糊PID控制器的參數(shù)主要是靠經(jīng)驗(yàn)獲得的,且運(yùn)算量太大;文獻(xiàn)[4]提出電壓前饋解耦與模糊PI相結(jié)合的方法,使得控制器具有自適應(yīng)參數(shù)調(diào)節(jié)能力,但參數(shù)同樣依賴于經(jīng)驗(yàn),控制效果很大程度上取決于經(jīng)驗(yàn)水平;文獻(xiàn)[5]和文獻(xiàn)[6]提出采用內(nèi)模和滑模的結(jié)構(gòu)進(jìn)行電流控制,可提高系統(tǒng)的響應(yīng)速度和穩(wěn)態(tài)性,但也存在穩(wěn)態(tài)誤差;文獻(xiàn)[7]提出基于模型預(yù)測(cè)控制的電流控制策略,可有效提高電流的動(dòng)態(tài)性能,但控制器的實(shí)現(xiàn)比較復(fù)雜。
本文以PID控制的PMSM模型為基礎(chǔ),提出一種基于自抗擾理論的PMSM電流環(huán)控制算法,采用自抗擾控制器(Active Disturbances Rejection Controller,ADRC)[8-11]取代PMSM q軸電流環(huán)的PID控制器,減小超調(diào),增強(qiáng)抵抗擾動(dòng)的能力,提高穩(wěn)定性。通過(guò)仿真試驗(yàn)驗(yàn)證該算法的正確性。
1 ADRC的設(shè)計(jì)及分析
ADRC的設(shè)計(jì)主要包括安排過(guò)渡過(guò)程部分的設(shè)計(jì)、擴(kuò)張狀態(tài)觀測(cè)器部分的設(shè)計(jì)和誤差反饋部分的設(shè)計(jì)等3部分。由此,ADRC主要由跟蹤微分器、擴(kuò)張狀態(tài)觀測(cè)器和非線性誤差反饋等3部分組成。為降低系統(tǒng)的復(fù)雜度,減少計(jì)算量,控制器一般采用簡(jiǎn)單的一階ADRC,可建立ADRC模型為
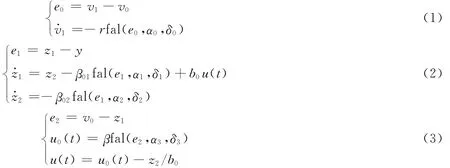
式(1)~式(3)中:v0為目標(biāo)信號(hào);v1為系統(tǒng)的跟蹤信號(hào);y為實(shí)際的測(cè)得的信號(hào);e0為系統(tǒng)實(shí)際行為與期望目標(biāo)之間的差值;e1和e2為擴(kuò)張狀態(tài)觀測(cè)器估計(jì)的變量誤差;r為非線性函數(shù)的時(shí)間尺度;z1和z2為擴(kuò)張狀態(tài)觀測(cè)器擴(kuò)張生成的狀態(tài)變量;β01、β02和β為擴(kuò)張狀態(tài)觀測(cè)器的參數(shù);u0(t)為擴(kuò)張狀態(tài)觀測(cè)器輸出的中間變量;u(t)為最終輸出的控制變量;b0為放大系數(shù)。
上述函數(shù)fe=fal(e(t),α,δ)的表達(dá)式為

式(4)中:δ為該函數(shù)的線性段的區(qū)間長(zhǎng)度;α為該非線性函數(shù)的參數(shù),0<α<1;sign為符號(hào)函數(shù)。
在MATLAB/Simulink中設(shè)計(jì)一階ADRC模型(見(jiàn)圖1)。
給定初始信號(hào)值為0、階躍時(shí)間為1、階躍值為1.0的信號(hào)進(jìn)行仿真運(yùn)算,結(jié)果見(jiàn)圖2。
從圖2中可看出:在0~1 s內(nèi)階躍值一直為0;在給定階躍值1.0處出現(xiàn)約9%的超調(diào);在2.7 s時(shí)達(dá)到穩(wěn)定的階躍值1.0。
佳能PowerShot D30在這組對(duì)比中并不起眼,但是它25米的下潛深度擊敗了除尼康W300之外的所有對(duì)手。2米防摔以及零下10攝氏度的防凍能力也相當(dāng)可觀,不過(guò)不像同組中的奧林巴斯TG-5以及理光WG-50,D30完全沒(méi)有防沖擊設(shè)計(jì)。佳能PowerShot D30還擁有全高清視頻拍攝以及GPS定位能力。D30在頗具圓滑線條的機(jī)身前后加上了兩片增加摩擦力的膠皮以保證足夠的握持穩(wěn)定性,邏輯合理的操控布局以及足夠大的按鍵尺寸使得這臺(tái)相機(jī)成為這次測(cè)試中操作效率方面最優(yōu)秀的機(jī)型。考慮到水下攝影師往往需要隔著厚厚的手套進(jìn)行操作,佳能的操控設(shè)計(jì)為它贏得了更高的分?jǐn)?shù)。
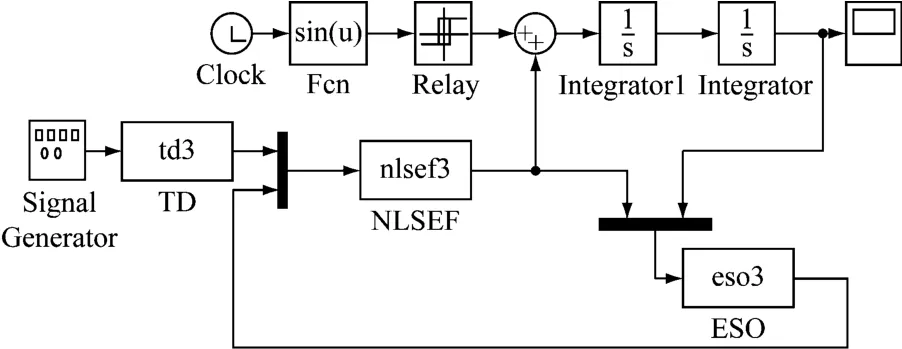
圖1 一階ADRC模型
作為對(duì)比,給定相同的階躍信號(hào),用PID控制器進(jìn)行處理,結(jié)果見(jiàn)圖3。
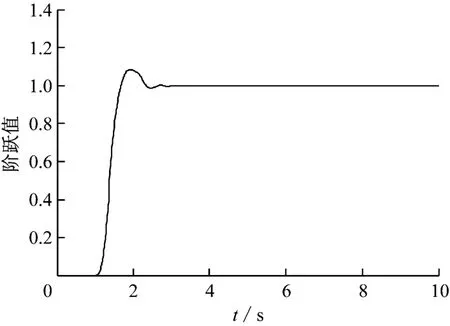
圖2 經(jīng)ADRC處理后的階躍信號(hào)響應(yīng)圖
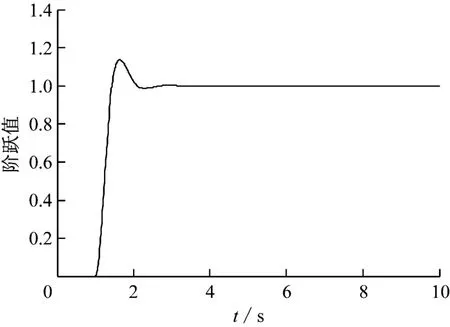
圖3 經(jīng)PID處理后的階躍信號(hào)響應(yīng)圖
從圖3中可看出:在0~1 s內(nèi)階躍值一直為0;在給定階躍值1.0處出現(xiàn)約12%的超調(diào);在2.7 s時(shí)達(dá)到穩(wěn)定的階躍值1.0。
通過(guò)對(duì)比圖2和圖3可知,經(jīng)過(guò)ADRC處理后的圖形比經(jīng)過(guò)PID處理后的圖形更加穩(wěn)定,超調(diào)優(yōu)化效果尤為明顯。
2 PMSM電流環(huán)的ADRC模型設(shè)計(jì)
2.1 基于PID的PMSM矢量控制模型設(shè)計(jì)
以PMSM的矢量控制[12-16]為基礎(chǔ),在MATLAB/Simulink中建立仿真模型,該模型主要由位置和速度檢測(cè)模塊,軸、速度環(huán)PI檢測(cè)器,坐標(biāo)變換模塊,SVPWM模塊和逆變模塊等4部分組成(見(jiàn)圖4)。
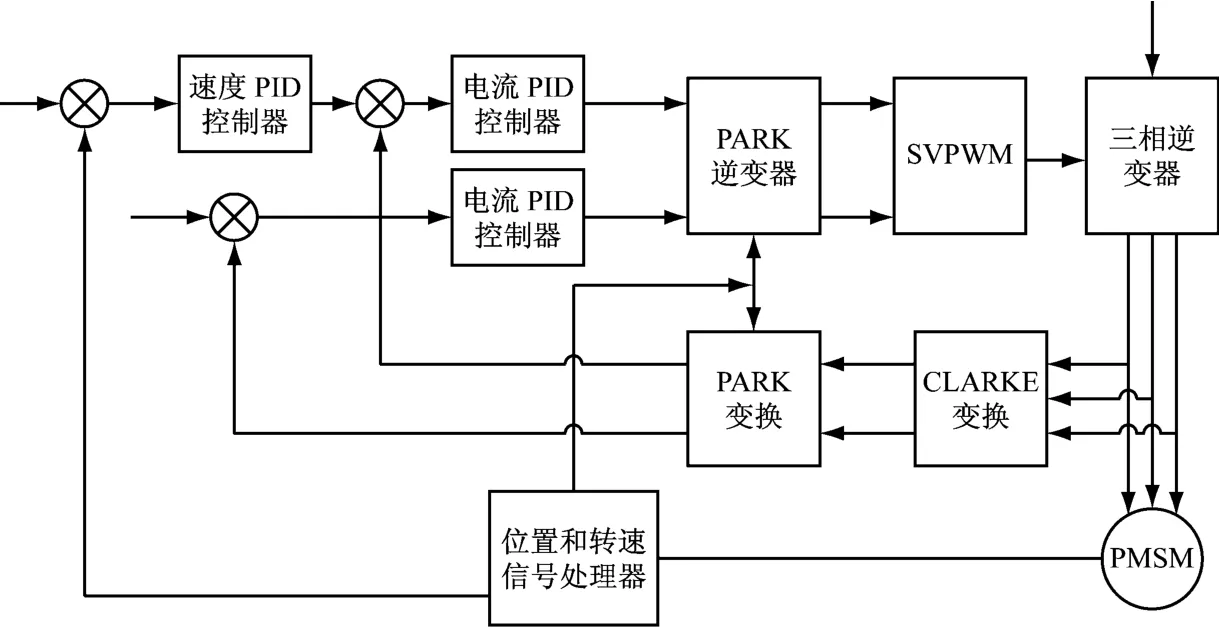
圖4 PMSM的矢量控制圖
PMSM模塊[17-19]的定子繞組共包括A相、B相、C相的輸入和負(fù)載轉(zhuǎn)矩輸入Tm等4個(gè)輸入端,大體上按照星形連接。輸出參數(shù)包括:定子三相電流iA、iB、iC,A;轉(zhuǎn)子機(jī)械位置角θThetam,rad;電磁轉(zhuǎn)矩Tm,N·m;轉(zhuǎn)子角速度ωr,rad/s。
2.2 基于ADRC的PMSM矢量控制模型設(shè)計(jì)
用一個(gè)一階ADRC控制器替換PMSM矢量控制圖中q軸的PID控制器,進(jìn)行PMSM q軸的ADRC伺服控制設(shè)計(jì),在MATLAB/Simulink中建立模型圖見(jiàn)圖5。
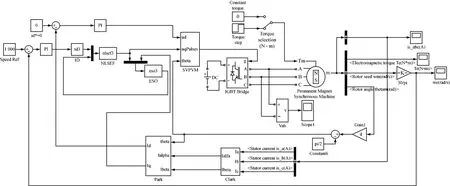
圖5 PMSM q軸的ADRC伺服控制設(shè)計(jì)模型圖
3 與PID控制結(jié)果對(duì)比分析
仿真試驗(yàn)的參數(shù)設(shè)置為:電壓U=300 V;電動(dòng)機(jī)功率P=1.1 k W;定子繞組電阻R=2.875Ω;d相繞組自感與q相繞組自感相等,Ld=Lq=8.5×10-3;轉(zhuǎn)子磁通量Ψf=0.175 Wb;轉(zhuǎn)動(dòng)慣量J=8.0×10-4kg·m2;黏滯摩擦因數(shù)F=1.0×10-3;極對(duì)數(shù)Pm=4。
給定轉(zhuǎn)速1 000 r/min,在t=0時(shí)啟動(dòng)PMSM,初始負(fù)載為3 N·m;在t=0.04 s時(shí),負(fù)載由3 N·m突變?yōu)? N·m;系統(tǒng)仿真運(yùn)行時(shí)間為0.16 s,得到電流曲線、轉(zhuǎn)矩曲線和轉(zhuǎn)速曲線對(duì)比見(jiàn)圖6~圖8。

圖6 P M S M仿真電流圖對(duì)比
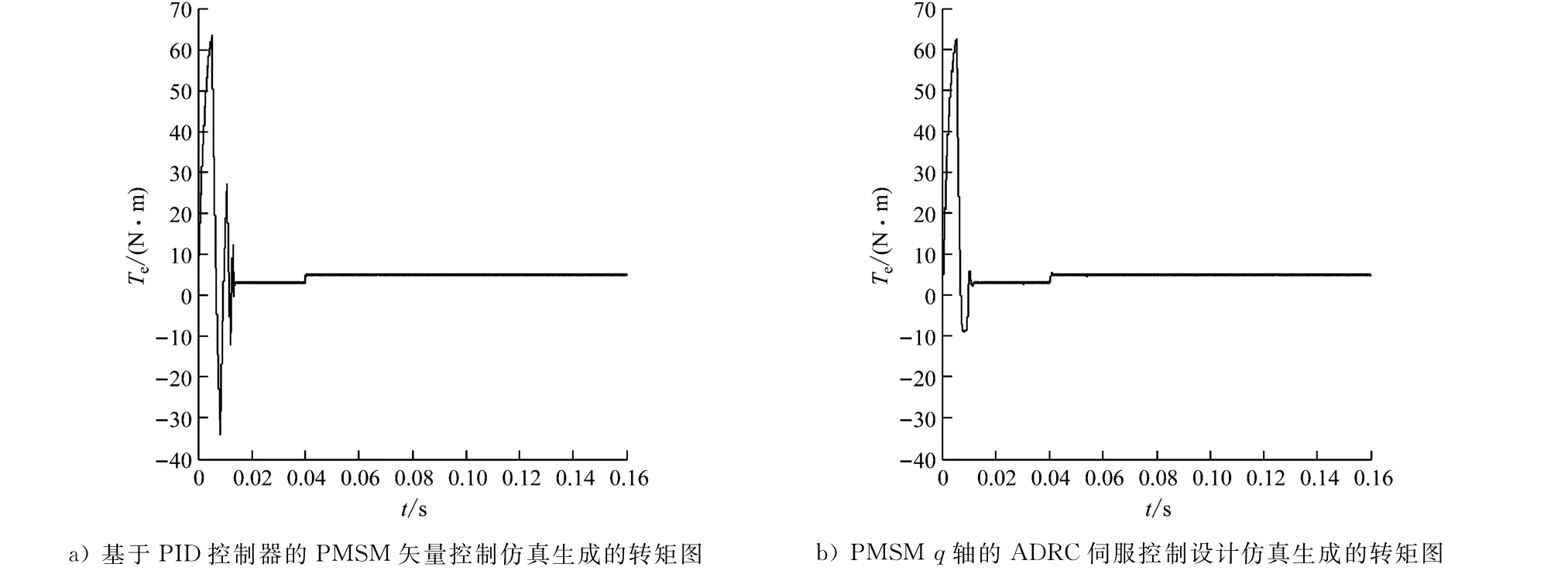
圖7 P M S M仿真轉(zhuǎn)矩圖對(duì)比
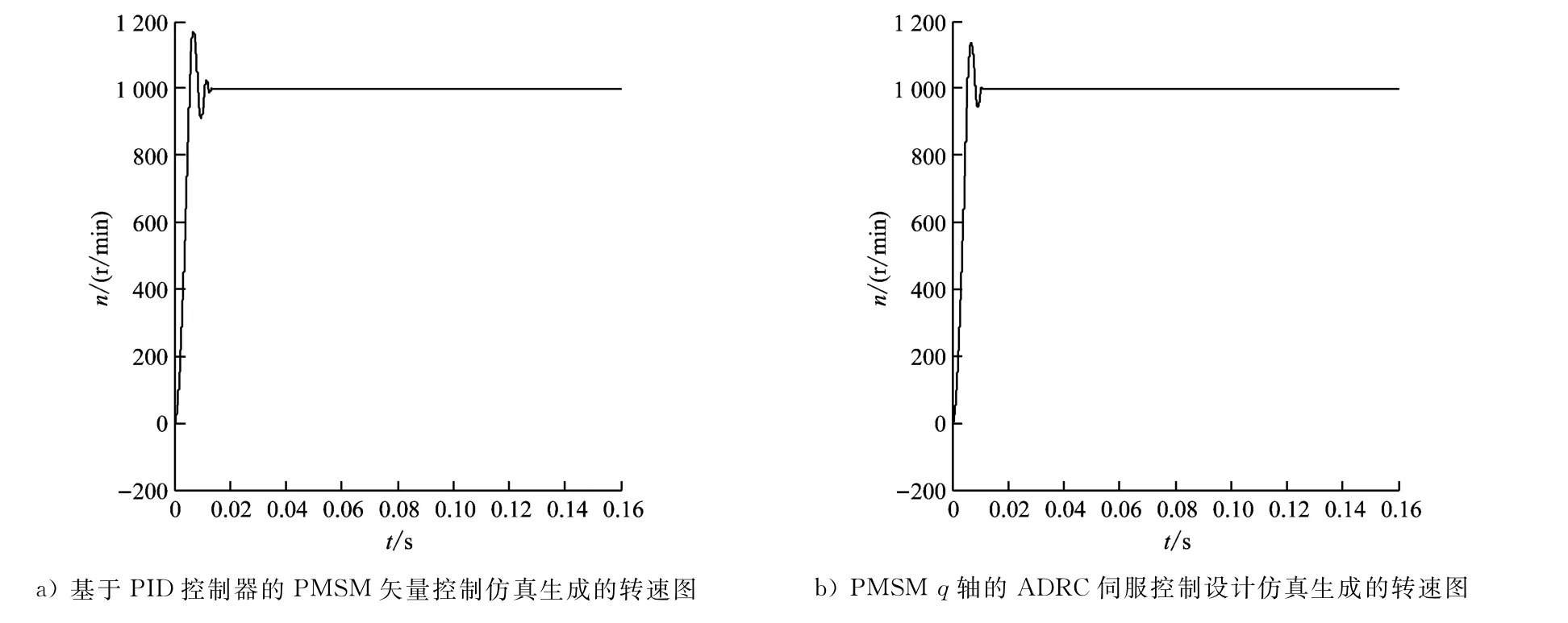
圖8 PMSM仿真轉(zhuǎn)速圖對(duì)比
從圖7中可看出,PMSM q軸的ADRC伺服控制設(shè)計(jì)仿真生成的轉(zhuǎn)矩圖與基于PID控制器的PMSM矢量控制仿真生成的轉(zhuǎn)矩圖相比,波動(dòng)幅度更小,波動(dòng)時(shí)間和達(dá)到穩(wěn)定值的時(shí)間更短,二次波動(dòng)幅值更小,穩(wěn)定性和抗干擾性能更好。
從圖8中可看出,PMSM q軸的ADRC伺服控制設(shè)計(jì)仿真生成的轉(zhuǎn)速圖與基于PID控制器的PMSM矢量控制仿真生成的轉(zhuǎn)速圖相比,波動(dòng)時(shí)間更短,響應(yīng)速度更快,兩者抵抗負(fù)載變化的能力都比較好,轉(zhuǎn)速變化可忽略不計(jì)。
4 結(jié) 語(yǔ)
本文在PID控制PMSM的基礎(chǔ)上,提出將自抗擾理論應(yīng)用到PMSM電流環(huán)的控制算法中,可優(yōu)化PMSM的性能,為解決工程實(shí)踐中的問(wèn)題提供參考。仿真結(jié)果表明,該控制算法具有以下優(yōu)點(diǎn):
1)研究是基于ADRC控制理論開(kāi)展的,安排有過(guò)渡過(guò)程,能減少超調(diào)量,提高穩(wěn)定性;
2)用到的ADRC可成功替代PMSM q軸電流環(huán)的PID控制器,優(yōu)化控制性能;
3)電流波動(dòng)更小,能提高電機(jī)的穩(wěn)定性;
4)設(shè)計(jì)簡(jiǎn)單,可應(yīng)用到復(fù)雜的環(huán)境中。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
 上海船舶運(yùn)輸科學(xué)研究所學(xué)報(bào)2018年3期
上海船舶運(yùn)輸科學(xué)研究所學(xué)報(bào)2018年3期
- 上海船舶運(yùn)輸科學(xué)研究所學(xué)報(bào)的其它文章
- 傳統(tǒng)企業(yè)改進(jìn)倉(cāng)儲(chǔ)管理的對(duì)策
- 上海長(zhǎng)興島典型農(nóng)用地土壤重金屬特征分析與生態(tài)風(fēng)險(xiǎn)預(yù)警評(píng)估
- 城市高架路全影型聲屏障的設(shè)計(jì)優(yōu)化與施工
- 基于動(dòng)態(tài)二進(jìn)制翻譯的關(guān)鍵內(nèi)存防護(hù)
- 經(jīng)典數(shù)據(jù)管理能力成熟度模型比較及戰(zhàn)略管控型集團(tuán)應(yīng)用路線建議
- 汽車融資租賃業(yè)務(wù)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)