基于超寬帶的溫室農用車輛定位信息采集與優化
2018-10-20 06:43:26林相澤林彩鑫薛金林鄭恩來
農業機械學報 2018年10期
關鍵詞:測量
林相澤 王 祥 林彩鑫 耿 晶 薛金林 鄭恩來
(南京農業大學工學院, 南京 210031)
0 引言
全球衛星定位系統(Global positioning system,GPS)的衛星信號經過室內層層障礙之后衰減嚴重,不能應用于室內定位[1-2]。隨著溫室大棚的逐年增加,溫室內農用車輛機械化、智能化需求增長迅速,室內定位技術成為滿足上述需求的關鍵[3-6],溫室精細農業的發展也亟需一種無線定位應用系統[7-8]。
相比傳統定位技術,室內定位技術起步較晚。自美國聯邦通訊委員會(Federal communications commission,FCC)在1996年制定了E-911定位標準以來,室內定位技術得到了快速發展,國內外學者相繼提出了多領域的室內無線定位應用,如無人機對農田的實時監測、智能可視化作業[9-11],移動機器人的自主導航、路徑規劃[12-15],工業中的過程控制、工業監測等[16]。隨著溫室精細農業的迅猛發展,眾多學者開始了溫室內的定位研究。文獻[17-19]在溫室中利用無線RSSI測距技術,使用加權質心算法獲得定位測量結果后,利用卡爾曼濾波算法進行定位信息最優化計算;WIDODO等[20]在溫室中設計了基于聲波的定位系統自校準方法;LUO等[21]利用RSSI測距技術進行了溫室內的定位研究以及王俊等[22]利用BP算法進行溫室內的定位研究。目前,由于溫室復雜的環境,溫室內定位技術的研究主要針對靜態物體的坐標測量,且精度在幾米之內。在實際測量過程中,測量數據主要受3方面的影響:試驗設備的制造誤差、安裝誤差以及室內環境內部對信號的遮擋等影響;傳感器偏差、靈敏度誤差、噪聲等其他隨機誤差等影響;信號傳播特性和測距方式的影響[23-25]。因此,提高定位精度必須提高抗干擾能力,解決信號衰減、多徑效應、視距傳播和信號振蕩校準等傳統問題。除了溫室內無線定位技術的精度問題,能耗和成本是目前無線定位技術的一個重要考慮因素。目前大部分的定位技術都需要在環境中安裝輔助節點,用于測距位置信息,為提高精度,就必須安裝大量的輔助節點,但增大了系統建設的成本和能耗。在測量誤差和能源消耗不可避免的情況下,減小測量誤差和控制能耗顯得尤為重要。
考慮上述原因,脈沖超寬帶(Impulse radio-ultra wide band,UWB)技術因其較強的穿透力、較高的傳輸速率和較小的功耗而引起廣泛的重視[26]。通過發送納秒級或者納秒級以下的超窄脈沖來傳輸數據,可以獲得吉赫級的數據帶寬,具有很強的時間分辨率,可獲得厘米級測距精度。UWB定位技術因其精度高、能耗低、設計簡單、成本低、網絡節點布置方便,對場地環境無苛刻要求,適合于溫室等室內環境中使用。目前,UWB測距技術主要包括:接收信號強度(Received signal strength indication,RSSI)[27-28]、信 號 到 達 時 間 (Time of arrival,TOA)、信號到達時間差(Time difference of arrival,TDOA)和信號到達角度(Angel of arrival,AOA)。其中TDOA有以下優點[29]:不存在相位模糊的問題,因此測向基線可以不受限制,系統復雜度低和系統定位的精度較高。
基于UWB技術的上述特點,本文選擇UWB技術作為無線載波通信技術,構建基于TDOA測距技術的超寬帶室內定位試驗平臺,并針對單一測距技術以及環境因素等各種影響帶來的測量誤差,分別采用K-means聚類與截段處理的方法處理靜態、動態精確定位問題,實現被測目標位置信息的優化求解。最后,利用相應的硬件設備,在實際溫室生產環境中進行試驗驗證。
1 定位試驗平臺設計
1.1 硬件設計
采用Ubisense公司生產的射頻芯片作為系統硬件基礎單元。該芯片符合IEEE802.15.4—2011超寬帶標準。超寬帶為6~8 GHz、傳輸通道為2.4 GHz、刷新率為0.01~20 Hz。標簽刷新率根據標簽運動速度和狀態從0.004 5~40 Hz自動分配,每個傳感器均支持持續達160 Hz的刷新速率,能夠以6.25 ms的時間間隔對標簽進行定位同時采用常規雙向2.4 GHz信號進行控制與測算信息傳輸。
在此硬件的基礎上,開發了UWB定位試驗平臺,如圖1所示。基站通過與標簽之間的信號傳輸,測得UWB信號在標簽與基站的傳輸時間,計算機讀取標簽接收的時間數據之后利用 TDOA定位算法,以確定標簽的位置信息。
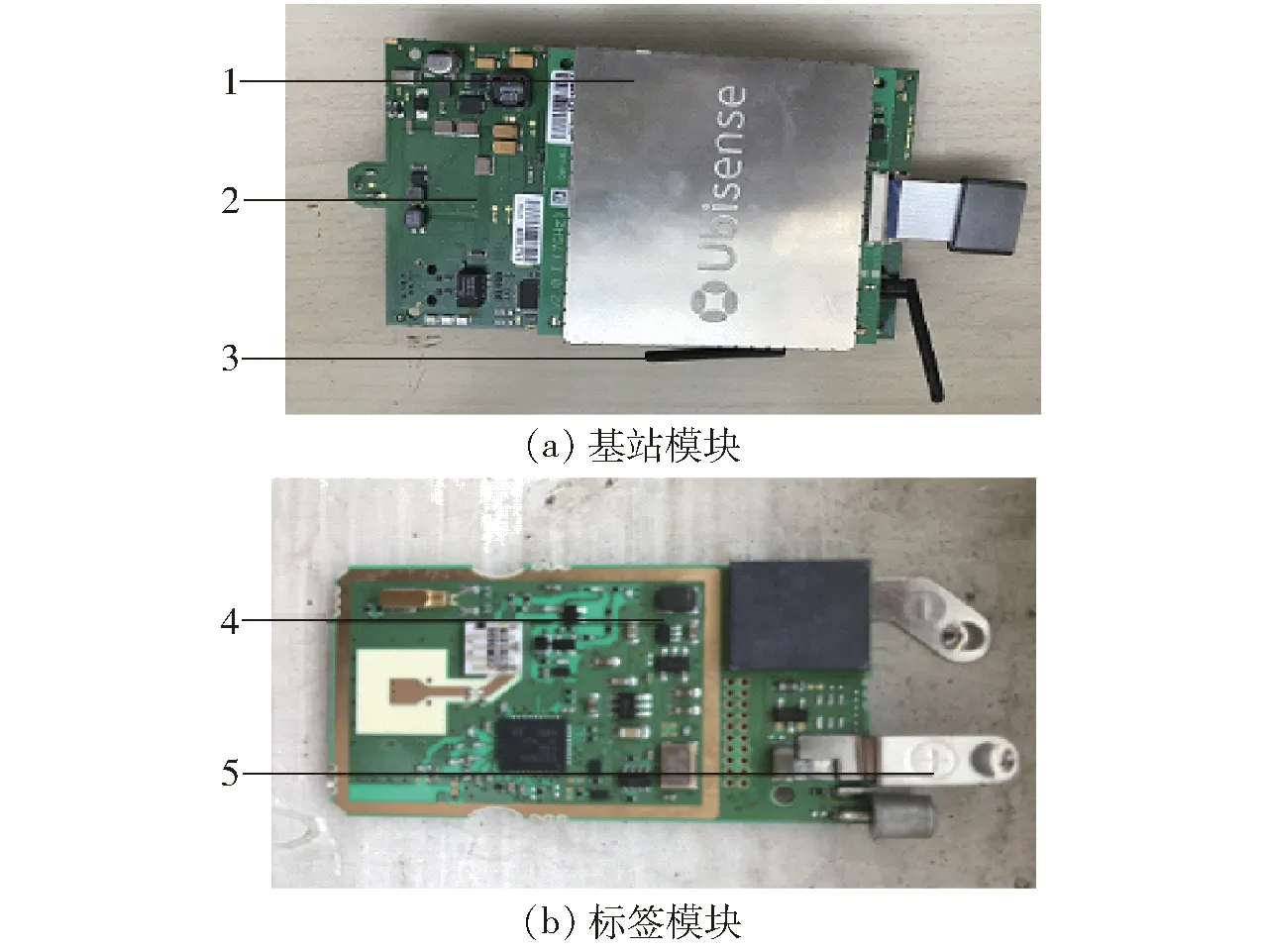
圖1 試驗系統模塊圖Fig.1 Test system module diagrams1.基站芯片核心板 2.基站芯片底板 3.基站接收天線 4.標簽芯片 5.標簽電池
1.2 TDOA測距算法
1.2.1定位坐標的獲取
TDOA定位問題中,通過測量2個基站到達待定位物體的傳播時間可以得到TOA測量值,進而可以得到TDOA的測量值。通過兩個及兩個以上的TDOA測量值可以得到待定位物體的二維位置坐標。假定待定位物體的位置坐標為(x,y),距離待定位物體最近的基站,即服務基站BS1的位置坐標為(x1,y1),其他參與定位的基站位置坐標為(xi,yi)(i=2,3,…,M;M為參與定位的基站數)。由TOA的測量值可以得到
(1)
其中式(1)左右兩邊平方可得
(2)
其中
式中Ri——基站BSi與待定位物體之間的傳播距離
待定位物體到基站BS1與基站BSi的傳播距離差Ri,1為

(3)
其中傳播速度C為3×108m/s,ti,1為待定位物體到BSi與BS1的傳播時間差值,由于
Ri=R1+Ri,1
(4)
所以聯立式(1),可以得到
(5)
其中
xi,1=xi-x1yi,1=yi-y1
可以把x、y、R1作為未知數,此時式(2)為關于這3個變量的三元一次方程,聯立方程組可以求得待定位物體的位置坐標。
1.2.2TDOA測距原理
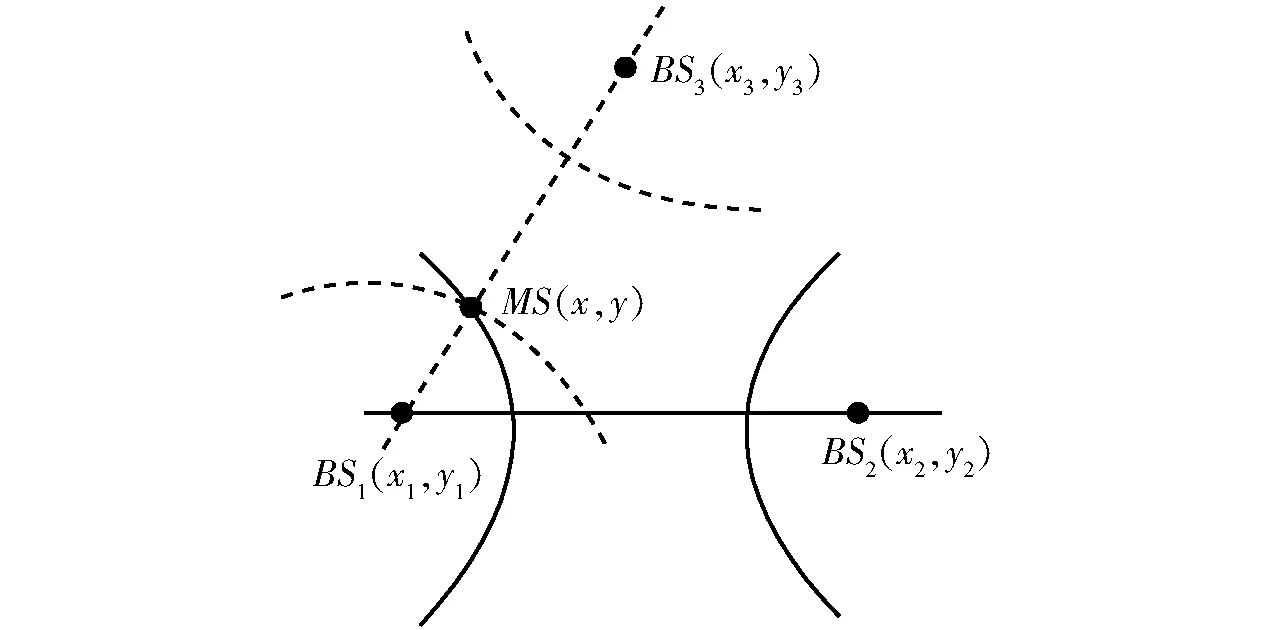
圖2 TDOA測距雙曲線Fig.2 TDOA ranging hyperbola
到達時間差TDOA是根據多個TDOA 數據對應的多條雙曲線的交點來估計目標發信機的位置。由于通過2個監測站的 TDOA 計算,只能得到一條目標信號源可能位置的雙曲線,準確定位目標信號源位置,至少在此設定3個基站和1個標簽組成定位系統。如圖2假設標簽MS的位置為(x,y),基站的位置分別為BS1(x1,y1)、BS2(x2,y2)、BS3(x3,y3),利用TDOA測距方法測量到的標簽與基站的距離分別是ct1、ct2、ct3,其中ti(i=1,2,3)為對應信號到達時間。標簽坐標為
(6)
(7)
式中c——光速
1.2.3TDOA誤差分析
雖然,超寬帶脈沖信號具有高達納秒級別的時間分辨能力,結合基于TDOA的測距算法在理論上可獲得厘米級別的定位精度[30],但是,在復雜室內環境下,UWB信號傳播過程中的多徑和非視距(Non-line-of-sight,NLOS)現象會影響TDOA測距誤差,是造成定位精度下降的主要原因[31-33]。造成多徑誤差的原因是由于接收機不能區分直達徑和多徑信號,使得相干TDOA估計中相關波形峰值偏移,導致距離估計誤差。NLOS誤差則是由于收發機之間直達路徑DP被障礙物阻擋,僅有反射或透射信號到達接收機,對非直達徑的TDOA估計導致恒正的距離偏差。由于在測量過程中的誤差影響不可避免,因此,定位信息的優化計算顯得尤為重要。
2 定位信息優化
2.1 靜態精確定位算法
2.1.1算法設計
當靜態測量坐標值時,UWB定位是利用納秒至微秒級的非正弦波窄脈沖不斷發射脈沖信號傳輸數據的。因此,由于測量時誤差來源的干擾,對同一位置,在一段時間內,測得的坐標數據會以一定的測量誤差分布在真實點的周圍。利用算法使得處理后的點接近真實點,便能提高定位的精度。由于溫室環境的操作往往需要進行多個點的同時定位,聚類方法可以解決求已知分類個數的中心的問題,因此本文采用K-means聚類算法處理靜態定位問題。
2.1.2K-means工作原理及流程
K-means屬于無監督學習,樣本所屬的類別是未知的,根據特征將樣本分類[34]。K-means核心思想為最小化所有樣本到所屬類別中心的歐氏距離和,采用迭代的方式實現收斂[35]。
(1)工作原理
輸入:聚類個數k,以及包含n個數據對象的數據庫。輸出:滿足方差最小標準的k個聚類。
(2)算法流程[36]
①給定訓練樣本{x(1),x(2),…,x(m)},x(i)∈Rn,隨機選取k個訓練值分別為μ1,μ2,…,μk∈Rn。
②計算每一個樣本i的所屬類別
(8)
式中c(i)——樣本到類別中心歐氏距離最小類別
③更新每一類的中心μj
(9)
式中Q——類別j中所有樣本特征和
q——類別j中的樣本個數
④不斷重復步驟②、③,直到畸變函數J(c,μ)收斂
(10)
式中J(c,μ)——所有樣本到其類別中心的歐氏距離平方和
2.2 動態精確定位算法
2.2.1算法設計
標簽運動過程中,在某一特定時刻t,設備測得的數據是唯一的,所以不能使用聚類算法來實現動態精確定位。當設備在一個時刻t測出一個數據(x,y)時,由于UWB設備測數據的隨機性和無規律性,很難找出一個固定的算法進行改進。因此,本文使用截段處理的方法,利用轉向角隨時間變化的特性來實現動態的精確定位。
2.2.2算法工作原理及流程
以農用車輛的圓運動為例,標簽從起點到終點移動了一段距離,截取其中一段極短時間間隔[t1,t2],如圖3所示,t1為起始時刻;t2為測量時刻;θ為t1時刻轉向角;y=k1x+b為t1時刻坐標與轉向角構成的直線;m為設備測取點;n為動態算法處理的點。
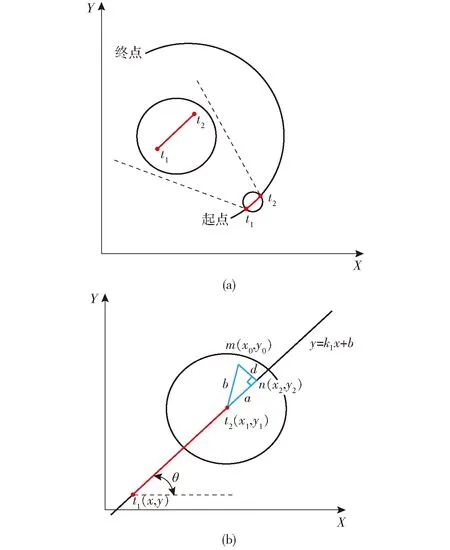
圖3 農用車輛作業仿真路線圖Fig.3 Diagrams of agricultural vehicle operation simulation routes
由于選取時間短,可將標簽從t1到t2時刻運動的路線看作一條直線,如圖3a放大部分所示。具體算法如圖3b所示,如果t1時刻坐標(x,y)已知,再測得t1時刻的轉向角θ,即可求得直線y=k1x+b。這時,用UWB定位設備在t2時刻測出一個數據點m為(x0,y0),則點m到直線y=k1x+b的距離為
(11)
根據m點與直線y=k1x+b的位置關系,求得點n(x2,y2)。分如下兩種情況:
情況1:點m在直線y=k1x+b下,則
(12)
情況2:點m在直線y=k1x+b上,則
(13)
由幾何定理可知,如圖3b所示,點n即為改進后的坐標,(x1,y1)為t2時刻標簽的實際坐標,易知改進后的坐標優于TDOA測距方式測得的坐標值。
3 試驗驗證
3.1 試驗設備
試驗在江蘇省農業科學院番茄玻璃溫室進行,試驗田壟壟長10.2 m,壟寬0.6 m,番茄株高約1.8 m,試驗條件為無自然風,溫度約為31℃,濕度為58%。首先,根據觀察試驗實際場地并結合TDOA測距算法布置基站節點。本文選定3個基站,節點排布如圖4所示,分別記作BS1(x1,y1)、BS2(x2,y2)、BS3(x3,y3),1個標簽記作MS,進行固定坐標系下的定位試驗,測取標簽的位置信息(x,y);其次,根據圖4所示的基站節點,將基站安裝在溫室大棚相應節點位置的鐵架上(基站高為2.4 m),完成室內定位試驗平臺的搭建;最后,將標簽固定在南京農業大學研制的溫室自行走施藥機器人上,如圖5所示。使用計算機分別讀取標簽到各個基站的時間信息并利用TDOA算法進行農用車輛的定位。具體步驟為:建立坐標系,選取坐標原點;對基站進行供電;進行基站之間的時間同步;將標簽固定在農用車輛上;利用計算機讀取標簽到基站的時間信息;在計算機上使用TDOA算法進行農用車輛的定位。
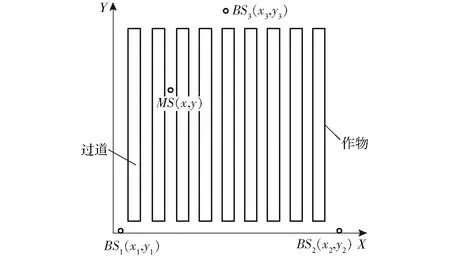
圖4 定位試驗節點排布示意圖Fig.4 Sketch of location test node

圖5 試驗實景圖Fig.5 Experimental scene diagram
3.2 試驗結果及分析
3.2.1靜態定位試驗
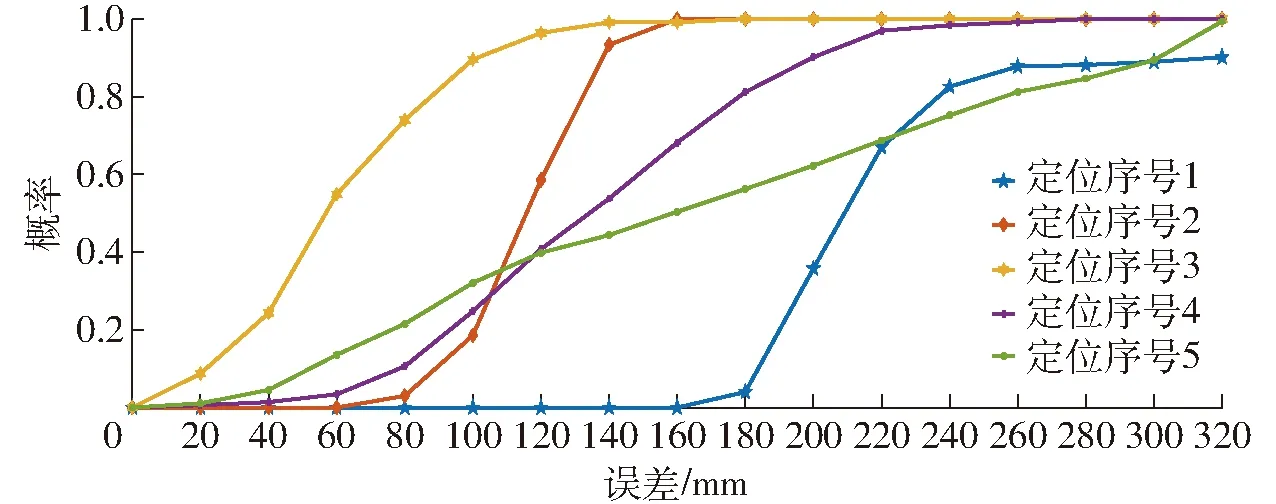
圖6 不同測量距離的誤差累積分布函數Fig.6 Cumulative distribution function of error of different measurement distances
試驗根據TDOA測距算法,利用車輛在溫室中的不同的靜態位置分別采集3 min,500 組數據,測量值與實際值的距離差即為誤差距離。圖6分別給出了在5次不同靜態位置進行試驗的誤差累積分布函數,即在不同靜態點下測量數據的誤差小于或等于某個數值的概率。由圖6可知,當用TDOA測距算法測量車輛位置時,誤差距離都在120 mm以外,有些甚至達到了260 mm。
從表1可以看出,將K-means算法應用到靜態點的優化時,使用K-means聚類算法處理后的最大誤差為0.100 3 m,最小誤差為0.022 1 m,平均誤差為0.063 4 m,驗證了該聚類算法對優化靜態定位的有效性。通過上述分析可知,使用K-means聚類可以使得設備測取的數據接近真實點,以達到提高定位精度的效果。

表1 K-means算法優化下TDOA算法的測量值與實際值對比Tab.1 Comparison of measured and actual values of TDOA algorithm with K-means optimization m
由此可見,當用TDOA測距算法測量標簽位置信息時,驗證了K-means聚類算法對優化靜態定位信息的有效性。通過上述分析可知,使用K-means聚類可以使得設備測取的數據接近真實點,以達到提高定位精度的效果。
3.2.2動態定位試驗
試驗采用了TDOA算法作為測距方法,并且在圖4所示的基站節點的排布方式基礎上,進行動態定位試驗。在溫室中分別選擇其中1條或多條貨道,從起點開始,分別以0.1、0.2、0.3 m/s的速度勻速行進,圖7顯示的是沿著其中一條貨道行駛的路徑,同時采集相應的數據。將采集的數據和實際行走軌跡進行比較,其中1次貨道的行走測量路徑信息如圖8所示。

圖7 系統定位試驗路線圖Fig.7 System positioning test route
通過表2~4可知,在車輛運動過程中,利用TDOA測距方法測量的點難以達到8 cm以內的精度,大部分的誤差距離都在15 cm以上。通過動態精確算法改進后達到8 cm精度的平均概率為31.348%,優于設備本身的平均概率8.34%。該動態改進算法使設備原有概率提升了3.7倍以上,驗證了算法優化的有效性。

圖8 動態試驗結果Fig.8 Dynamic test result

貨道數量誤差/cmTDOA測量個數/占比/%動態優化改進個數/占比/%0~815/3.061111/22.65318~15100/20.408165/33.673>15375/76.530214/43.6730~831/6.200149/29.80028~15285/57.000208/41.600>15184/36.800143/28.6000~858/11.600169/33.80038~15157/31.400278/55.600>15285/57.00053/10.6000~847/9.958177/37.50048~15152/32.203214/45.339>15273/57.83981/17.161
4 結論
(1)利用TDOA測距技術,根據標簽與基站的信號接收時間,進行溫室環境下標簽位置的測量。再分別利用K-means聚類與截段處理的方法進行靜態、動態定位信息優化計算,以消除脈沖信號傳播特性和單一測距方法導致的測量誤差,獲得準確的定位信息,為溫室農用車輛精確作業提供了技術支撐。
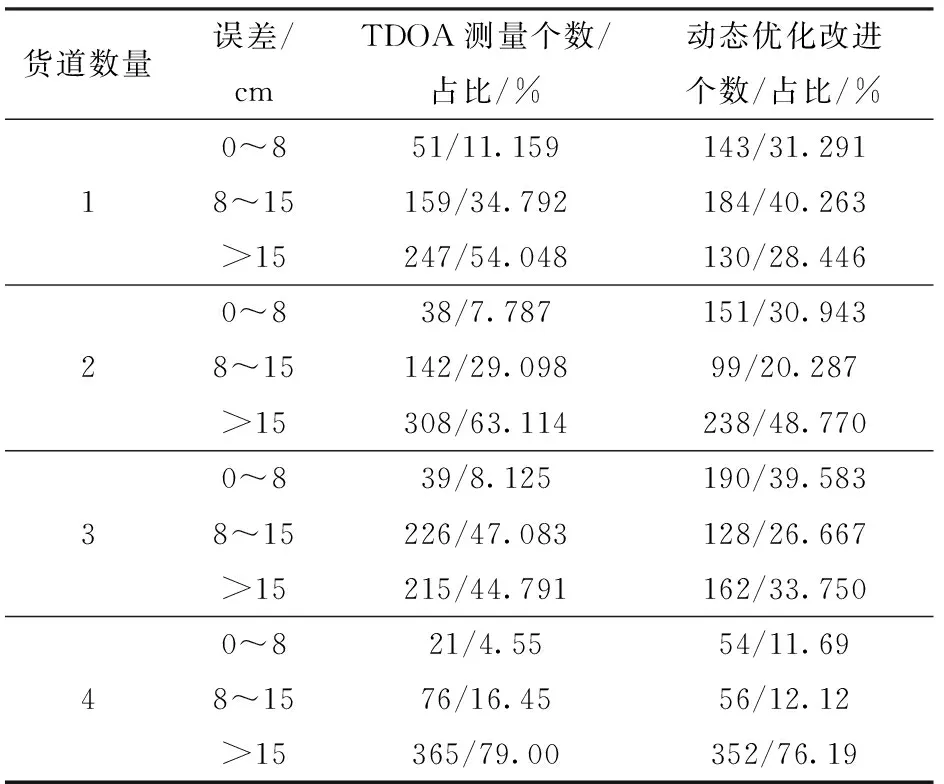
表3 動態優化對比(0.2 m/s)Tab.3 Dynamic optimization contrast(0.2 m/s)
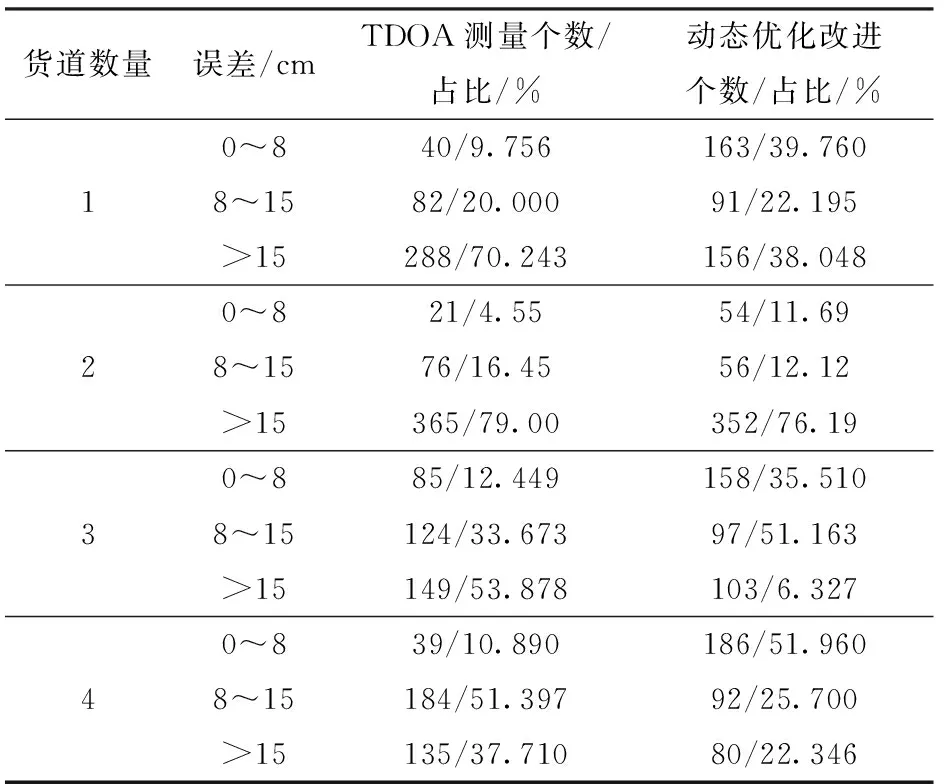
表4 動態優化對比(0.3 m/s)Tab.4 Dynamic optimization contrast(0.3 m/s)
(2)利用射頻芯片 Ubisense作為脈沖超寬帶技術的硬件基礎搭建定位試驗平臺,并在溫室環境下進行靜態以及動態定位試驗。將TDOA算法得出的定位信息與優化后的定位信息進行對比得出比較結果。
(3)試驗結果表明,在溫室環境下僅僅利用TDOA測距算法的定位精度并不理想,利用動靜態優化算法可以獲得較高的定位精度。靜態定位精度平均值為0.063 4 m,動態定位精度在8 cm的概率提升至原來的3.7倍,可以為溫室環境下農用車輛的精細作業提供定位基礎。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00