商用車電子穩定系統研發及運用研究
2018-10-22 08:39:26陳海淼
汽車實用技術 2018年19期
陳海淼
(浙江正飛科技有限公司,浙江 紹興 312366)
前言
隨著高速公路的發展和汽車性能的提高,汽車行駛速度不斷加快,道路行車密度不斷增大。在行駛過程中,因外界干擾,駕駛員在緊急狀況下采取一些避讓措施,但由于商用車重心高、重量大,往往致汽車進入不穩定行駛狀態,即出現車輛折疊或完全滑出跑道等危險狀態,極易引起交通事故。根據AUDI公司的統計數據,在所有發生的交通事故中,車速在80km/h到100km/h中有40%的交通事故與車輛失去穩定性有關,車速越高,比例越大。如何提高商用車制動穩定性、安全性和高效性正在成為公眾和行業關注的焦點。與此相應,能夠有效提升商用車安全和效率的控制技術和產品陸續被研發出來,如防抱死制動系統(ABS)、驅動防滑系統(ASR)、電控制動系統(EBS)、電子穩定系統(ESC)等。
1 電子穩定系統定義及組成
商用車電子穩定系統ESC(Electronic Stability Control)是電子穩定控制系統和行駛安全性補充系統,幫助避免發生危險。在快速轉彎或變道時,通過車身傳感器測量車身的實際狀態(如偏移量,滑移量),控制車輪制動器或控制發動機扭矩,補償車輛的穩定性。當車輛處于極不穩定狀況時,ESC系統自動起作用。
ESC系統由電子控制單元模塊、執行機構模塊和傳感器模塊三大主要部分組成,ESC系統整車布置如圖1所示。
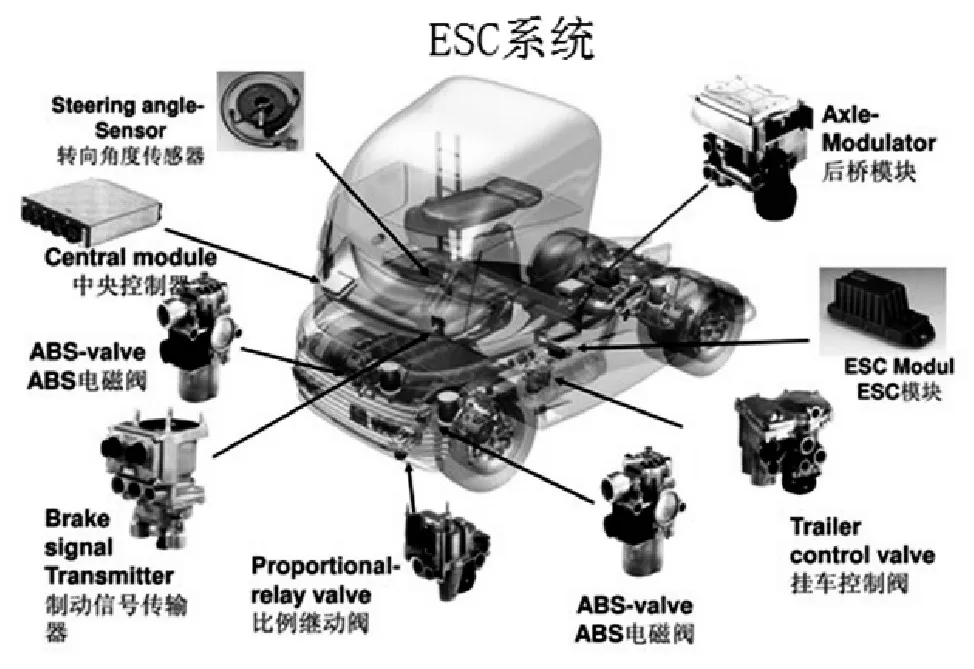
圖1 ESC 系統整車布置圖
1.1 電子控制單元
電子控制單元(ECU)通過 CAN接口與傳感器連接起來,接收處理傳理感器信號、識別駕駛員的駕駛意圖、控制和監視整個制動系統。ECU通過制動信號發送器接收到的信號和外部減速需求確定車輛減速,通過速度輪數傳感器測量的減速作為控制系統輸入信號,通過壓力傳感器測得壓力計算前后橋閥等執行機構制動力,產生相應的制動減速度。其他汽車部件如發動機ECU,傳動軸ECU 可以通過SAEJ1939定義地址來實現CAN 通訊。
ECU模塊應安裝在車輛重心附近。
1.2 執行機構
前后橋閥自帶控制模塊,其中前橋閥采用修正的獨立控制,控制前橋左右輪制動壓力;后橋閥控制模塊與ECU連接,共同控制后橋左右輪的制動壓力。當系統監測到車輛有側傾或轉向不足、過度的危險時,ESC系統通過前后橋閥模塊對相應的車輪進行制動,改變車輛的制動力、驅動力、側向力,保證車輛具有穩定的行駛狀態。
1.3 轉向角傳感器
轉向角傳感器用來檢測方向盤的轉向角度和轉向方向。轉向角傳感器會根據已知的轉向傳動比,換算成車輪轉向角,為ESC系統提供絕對的轉向角度。
轉向角傳感器需做防水防塵處理,應安裝在方向盤下面。
1.4 橫擺角速度/橫向加速度傳感器
橫擺角速度/橫向加速度傳感器用于監測商用車質心處的橫向加速度,判斷車輛是否處于側翻等不穩定狀態,提前采取預防側翻的措施。
橫擺角速度/橫向加速度傳感器應安裝在車架質心附近。
1.5 壓力傳感器
壓力傳感器用于監測控制管道的制動壓力大小,并將相關數據傳送給 ECU并計算出作用在車輪上的制動力和整車的縱向力大小。
1.6 輪速傳感器
ESC 系統使用輪速傳感器獲取車輛速度。當車輪轉動時,電磁式/數字式輪速傳感器輸出前后軸相應的脈沖信號,ECU通過脈沖數計算當前的車速。當兩軸的車速不同,滑差不同時,ESC系統應用滑移控制調節每個軸上的動力以獲得最佳制動力分布。
2 電子穩定系統工作原理
商用車電子控制單元通過傳感器和運算邏輯來識別駕駛員期望的車輛運動狀態,同時測量和估計出車輛的實際運動狀態。當車輛的行駛軌跡與駕駛員輸入不統一時,ESC系統通過智能化的電子控制方案找出汽車行駛狀態不穩定的具體原因。在極短時間內,按一定的控制邏輯對車輪的縱向力大小進行相應的控制和調節,使車輛穩定減速,保證車輛安全,阻止潛在的危險情況的發生。
為計算駕駛員期待的車輛行駛狀態,電子控制單元依靠簡化的物理——數字模型(單車轍車輛模型),獲得牽引車的設定橫擺速度,在車輛裝配最后,或在車輛行駛中利用專門的匹配算法(如卡爾曼濾波器或最小二乘法遞歸評估器)將車輛特征相適應的參數(特征車輛速度、橋距和轉向傳動比)輸入到技術模型中。由于商用車的各種變形車和裝載的變化遠大于轎車的各種變形車和裝載的變化,在線匹配車輛參數顯得特別重要。同時,ESC 系統可從可用的測量參數:橫擺率、橫向加速度和車輪轉速獲得當前車輛的運動狀態。當前的汽車運動和由駕駛員期待的運動明顯偏差導致控制誤差。控制誤差由ECU本身的誤差轉換為修正的設定橫擺力矩。商用車設定橫擺力矩大小除了與調節誤差有關外,還與當前的汽車配置(車橋距離、車橋數、有沒有掛車等)和載荷狀況(重量、在縱向方向的重心位置)有關。ESC系統要連續適應這些動態變化的參數,通過估算算法,得到載荷狀況。估算算法可以從發動機控制信號(發動機轉速和扭矩)和車輛的縱向運動(車輪轉速)而不斷識別當前車輛質量。
3 電子穩定系統工作過程
3.1 躲避前方突然出現的障礙物
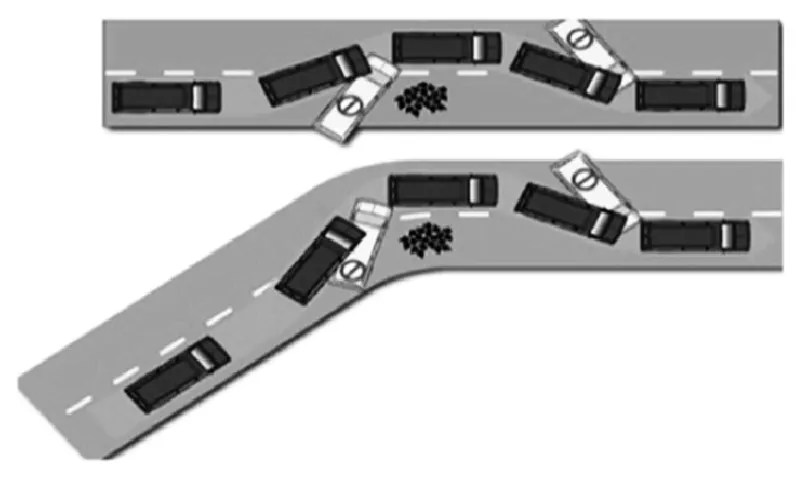
圖2 ESC對車輛運動的控制效應圖
圖2是配備ESC系統和未配備ESC系統的兩車在避讓障礙物時行駛動力學比較。車輛在行駛過程中避讓前方突然出現的障礙物而突然變道時,駕駛員試圖緊急制動,猛打方向盤,車輛會有轉向不足傾向,即車輛不再跟隨駕駛員期望的行駛方向。ESC系統識別出汽車不穩定的行駛趨勢,自動介入油門與制動的操作,控制發動機功率輸出,增加左后輪制動壓力,使作用在車輛上的橫擺力矩發生變化,修正車輛的動態。在恢復到原行駛路線時,車輛又會有轉向過度的傾向,ESC系統通過在左前輪施加制動力保證車輛穩定,順利通過障礙物。
3.2 轉向不足或過度
汽車在轉彎時,轉向角傳感器檢測預定行駛方向,橫擺角速度/橫向加速度傳感器檢測轉向過程中產生的橫向加速度,ESC系統接收信號后對比分析計算兩者航偏力矩,當兩者出現偏差,如拐彎不足時(如圖3所示),ESC系統對汽車的每個輪子施加一個合適制動力,并對后內輪額外施加一個制動力,汽車會產生一個橫擺回正力矩,作用在此車輪上的側向力也相應減小,產生另一個橫擺回正力矩,汽車在兩個回正力矩的作用下回到駕駛員所期望的軌道上來。此外,ESC系統減小發動機輸出轉矩,汽車作減速運動,此時前軸的法向力和側向力增大,后軸的法向力和側向力減小,加劇汽車的橫擺運動,使汽車的實際運動狀態更接近駕駛員的期望值,提高了汽車的方向穩定性。
當汽車出現轉向過度時,通過上述方法,對外弧線前部車輪施加相應的制動,對發動機系統施加控制,阻止車輛向內滑移,轉向過度的實例見圖3。
4 電子穩定系統特點
(1)實時監控:ESC系統實時監控駕駛員的操作(轉向、制動和油門等)、路面信息、汽車運動狀態,并不斷向發動機和制動系統發出指令;
(2)主動干預:ABS/EBS等系統在起作用時,系統對駕駛員的操控起一定干預作用,但它不能調控發動機,而ESC則是主動調控發動機的轉速并可調整每個車輪的制動力,以修正汽車的過度轉向和轉向不足;
(3)事先提醒:ESC系統具有實時警示功能,當駕駛者操作不當或路面異常時,它會在主動干預的同時用警告燈警示駕駛者。
5 電子穩定系統不足
電子穩定系統是車輛新型的主動安全系統,它替駕駛員完成很多不可能的動作,讓車能夠更易于控制。但是任何東西都不是萬能的,ESC系統也逃脫不了物理定律的束縛。當車身出現輕微失控時,ESC系統可以通過制動系統修正車身姿態,但當車輛過彎速度太快,輪胎的抓地力抵不過離心力時,再高級的ESC 系統也無法挽回車輛側翻的結局。
6 電子穩定系統發展方向
ESC系統通過車載網絡與其他控制單元實現數據信號共享,集成其它先進的系統功能,比如ABS系統、ASR系統。在 ESC 系統的基礎上,也可以拓展其它的主動安全技術,如:自適應性巡航控制系統(ACC),自動緊急制動系統(AEB),先進的駕駛系統(ADAS)等。商用車主動安全技術未來的發展趨勢朝著智能網聯汽車方向發展,最終實現自動駕駛。
7 結論
隨著汽車電子制動產品的快速發展,消費者對安全性、舒適性要求的提高及市場的認同,ESC市場前景廣闊。而商用車ESC 系統在國外已批量生產,在國內尚處于研究階段,要達到產業化的程度,還有大量的工作要做。但我國也在適應時代要求,逐步對ESC 系統提出要求,GB 7258-2017《機動車運行安全技術條件》已經將ESC、AEBS等主動安全技術作為某些商用車型的標準配置。因此,我國必須抓住市場發展時機,用最快的速度研發、掌握和應用ESC技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
