采煤機(jī)模糊自適應(yīng)PID控制分析
2018-10-23 11:32:10李志慶
機(jī)械管理開發(fā) 2018年10期
李志慶
(山西汾西礦業(yè)集團(tuán)宜興煤業(yè), 山西 孝義 032302)
引言
計(jì)算機(jī)技術(shù)的應(yīng)用已經(jīng)延伸到各個(gè)領(lǐng)域,為采煤機(jī)控制提供了新的思路[1-2],并且可以把技術(shù)人員的經(jīng)驗(yàn)與智能算法綜合起來。工控計(jì)算機(jī)在被運(yùn)用之前就已經(jīng)設(shè)置好各種算法,這些算法將對(duì)參數(shù)進(jìn)行比照并得出一組最優(yōu)參數(shù),從而可以實(shí)現(xiàn)自動(dòng)調(diào)整PID參數(shù)[3]。這種控制方法最大優(yōu)點(diǎn)在于不需要建立精確的數(shù)學(xué)模型,通過把運(yùn)行的數(shù)據(jù)采用數(shù)學(xué)方法模型化控制規(guī)則,經(jīng)過在線推理完成PID參數(shù)的修改過程,整個(gè)過程就是模糊自適應(yīng)PID控制,可靠性較高、修改參數(shù)簡單等優(yōu)點(diǎn)[4-5]。
1 系統(tǒng)控制方法
滾筒高度的調(diào)整是通過使用液壓閥對(duì)油缸中的活塞桿伸縮驅(qū)動(dòng)采煤機(jī)搖臂實(shí)現(xiàn)的。其中,調(diào)高機(jī)構(gòu)、采煤機(jī)液壓系統(tǒng)是非線性的,同時(shí)煤層結(jié)構(gòu)復(fù)雜多變具有不穩(wěn)定性。從以上幾個(gè)方面可以看出,采煤機(jī)在進(jìn)行記憶調(diào)高時(shí)的調(diào)高負(fù)載是非線性的,因此需要及時(shí)對(duì)PID控制器參數(shù)進(jìn)行調(diào)節(jié),否則就會(huì)出現(xiàn)失控的情況。傳統(tǒng)的PID控制器參數(shù)的整定方法通常是由操作人員進(jìn)行試湊方法完成,存在反饋過慢的問題,使參數(shù)設(shè)置不能實(shí)時(shí)調(diào)整。在此過程中需要連續(xù)進(jìn)行生產(chǎn)就需要對(duì)參數(shù)進(jìn)行實(shí)時(shí)調(diào)節(jié),常規(guī)的PID無法達(dá)到其效果。
2 組成及原理
從模糊PID控制器原理圖看出,輸入量是輸入信號(hào)與輸出信號(hào)的偏差e,同時(shí)記偏差變化率Ce,輸出量為 ΔkP、ΔkI、ΔkD。其中,Ge和 GCe作為量化因子,而GkP、GkI和GkD則作為比例因子,依照對(duì)象輸入量、輸出量選取取值范圍。對(duì)控制對(duì)象進(jìn)行模糊推理得到 ΔkP、ΔkI、ΔkD分別作為 kP、kI、kD參數(shù)增量,PID 參數(shù)在線調(diào)節(jié)完成,基本原理圖如1所示。PID參數(shù)調(diào)整計(jì)算公式如下:

式中:kP、kI、kD為比例、積分、微分系數(shù);kP0、kI0、kD0為各個(gè)參數(shù)的初始值;模糊推理結(jié)果是{e,Ce}P、{e,Ce}I、{e,Ce}D。
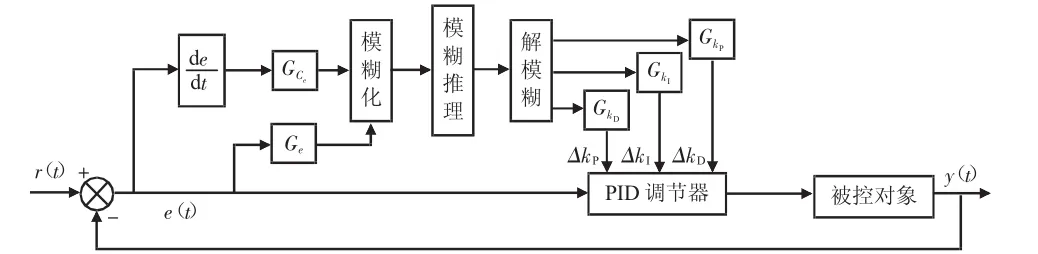
圖1 模糊PID控制原理框圖
3 模糊自適應(yīng)PID控制器的設(shè)計(jì)
實(shí)現(xiàn)采煤機(jī)記憶截割的重要因素是模糊自適應(yīng)PID控制器設(shè)計(jì)是否合理,它決定了最后的控制效果。人工示范刀作為基準(zhǔn)數(shù)據(jù)存儲(chǔ)在計(jì)算機(jī)中并在計(jì)算機(jī)程序和算法下形成軌跡,此后在每一次截割循環(huán)過程進(jìn)行跟蹤,算出滾筒的高度誤差及其誤差變化率,采取模糊自適應(yīng)控制器的控制規(guī)則將得到輸出量在線對(duì)PID參數(shù)進(jìn)行修改,最后將得到的參數(shù)以采用電液比例方向閥控制液壓缸動(dòng)作來完成對(duì)采高的控制[6]。
3.1 模糊控制器結(jié)構(gòu)
在模糊控制器輸入端的數(shù)目表示模糊控制器的維數(shù)。維數(shù)的高低是控制精度的決定因子,提高維數(shù)雖然提高了控制精度,但同時(shí)使控制規(guī)則變得復(fù)雜,最后導(dǎo)致算法難以實(shí)現(xiàn)。本設(shè)計(jì)選取二輸入三輸出結(jié)構(gòu)形式的模糊控制器,這樣可以同時(shí)在滿足足夠高精度的前提下算法簡單,其中輸入量為誤差e和誤差變化率Ce。另外三個(gè)輸出量分別為PID控制參數(shù) kP、kI、kD的增量 ΔkP、ΔkI、ΔkD。
3.2 輸入、輸出變量和模糊化語言
在采煤機(jī)截割煤層人工示范下,輸入變量誤差e是基準(zhǔn)截割循環(huán)j0的相鄰采樣差值,設(shè)第i個(gè)高度是和第 i-1個(gè)高度是(L/Δx)),工作面的長度L,采樣間隔 Δx=1.0 m。則輸入變量誤差為:

誤差變化率為:

結(jié)合記憶截割的顯著特征和專家的豐富實(shí)踐,輸入變量誤差e和誤差變化率Ce及輸出變量ΔkP、ΔkI、ΔkD量化后為 E、CE、ΔkP、ΔkI、ΔkD。其中 E、CE、ΔkP、ΔkI、ΔkD的模糊子集均取為:
E、CE、ΔkP、ΔkI、ΔkD={NB,NM,NS,ZO,PS,PM,PB}.
論域均取為:
E、CE、ΔkP={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},ΔkI、ΔkD={-0.06,-0.05,-0.04,-0.03,-0.02,-0.01,0
0.01,0.02,0.03,0.04,0.05,0.06}.
其中{NB,NM,NS,ZO,PS,PM,PB}分別代表負(fù)大,負(fù)中,負(fù)小,零,正小,正中,正大。
3.3 模糊化精確量
模糊變量賦值的含義是指用確定論域內(nèi)元素所對(duì)應(yīng)模糊語言變量的隸屬度。通常我們采用隸屬度函數(shù)確定模糊分布。常用的有三角型、高斯型、梯型三種。在實(shí)際應(yīng)用過程中,鑒于計(jì)算三角形或梯形隸屬函數(shù)使用起來較為簡單,且與其他類型的隸屬函數(shù)相比較而言輸入值的靈敏性更大,所以只要可在滿足精度要求的情況下,通常都可使用三角形或者梯形作為模糊集合的隸屬函數(shù)。綜合以上分析結(jié)果,本文 E、CE、ΔkP、ΔkI、ΔkD都采用三角型隸屬函數(shù)。
三角型:用三個(gè)參數(shù)表示(a,b,c),如公式(4)所示:

3.4 模糊控制規(guī)則
在采煤機(jī)進(jìn)行調(diào)高的過程中,模糊自適應(yīng)PID控制規(guī)則確定時(shí)不僅需要遵循PID參數(shù)自整定原則還要截割技術(shù)人員的實(shí)際工作經(jīng)驗(yàn),調(diào)高系統(tǒng)模糊控制規(guī)則表設(shè)計(jì)情況在表1列出。
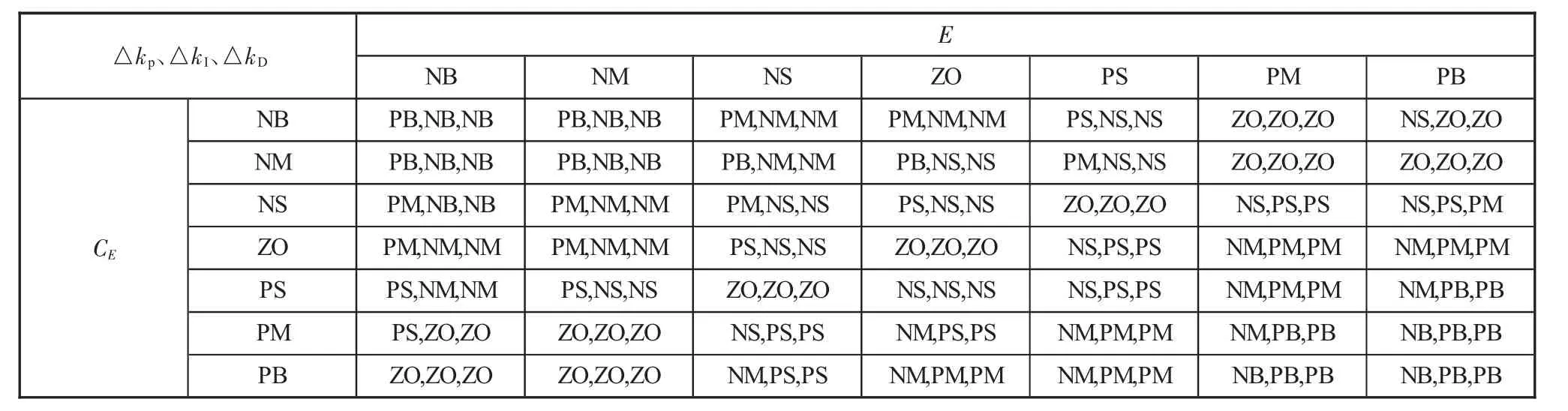
表1 模糊控制表
3.5 模糊推理與反模糊化
模糊推理首先需要知道控制規(guī)則的同時(shí),還需要有能夠通過輸入量的模糊集合推導(dǎo)出輸出量的模糊集合。模糊推理規(guī)則常用有這兩種方法分別為Mamdani操作法和Larsen乘積操作法。Larsen推理法特點(diǎn)是以所有輸入變量帶來的影響為考慮對(duì)象,不是以主要的輸入變量帶來的影響為對(duì)象,沒有必要通過復(fù)雜數(shù)學(xué)計(jì)算來完成合成推導(dǎo),因此本文將采取Mamdani推理法。Mamdani推理法是通過最大、最小之間的關(guān)系合成來進(jìn)行推理。
經(jīng)過模糊推理算法得到的模糊矢量輸出量,是無法直接對(duì)被控對(duì)象進(jìn)行控制的,只有當(dāng)獲取精確量的轉(zhuǎn)化后才能為執(zhí)行機(jī)構(gòu)所用,這個(gè)過程就是反模糊化過程。反模糊化與模糊化相背,求出模糊量能體現(xiàn)其精確值的過程,這就是精確化。解模糊算法中最常用的算法包括重心法、最大隸屬度法以及取中位數(shù)法等等。
因?yàn)橹匦姆紤]了全部的模糊量的信息,容易執(zhí)行運(yùn)算、使用方便,與最大隸屬度法做比較的話,重前者具有更好的平滑性。故本論文的模糊化方法選重心法,由式(5)逐一計(jì)算出模糊自適應(yīng)控制器對(duì)應(yīng)在采煤機(jī)記憶調(diào)高系統(tǒng)中的輸出的精確值ΔkP、ΔkI、ΔkD,去計(jì)算結(jié)果 ΔkP、ΔkI、ΔkD代入公式(1)進(jìn)行在線參數(shù)調(diào)整,獲得 PID 參數(shù)值 kP、kI、kD,滾筒高度實(shí)時(shí)控制得以實(shí)現(xiàn)。
重心法:以橫坐標(biāo)與模糊隸屬度函數(shù)曲線圍成圖形的面積的重心當(dāng)作最終輸出值,如公式(5)所示。
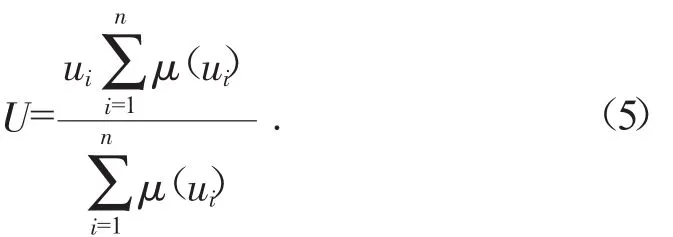
式(5)中:μi(ui)為代表輸出模糊集中的第i個(gè)元素隸屬度值;μi為輸出模糊集中的第i個(gè)隸屬度函數(shù)的權(quán)重值。
4 結(jié)論
1)以采煤機(jī)的滾筒高度為控制目標(biāo),以液壓油缸調(diào)節(jié)作為主要控制方法來完成采煤機(jī)的自動(dòng)截割;
2)結(jié)合采煤機(jī)記憶截割系統(tǒng)的工作方式和特點(diǎn),選擇使用非線性控制的方法來實(shí)現(xiàn)自適應(yīng)截割控制;
3)結(jié)合PID控制和模糊控制的原則,采取在線修改PID參數(shù)的策略進(jìn)行設(shè)計(jì)。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
防爆電機(jī)(2022年1期)2022-02-16 01:14:06
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
河北畫報(bào)(2021年2期)2021-05-25 02:07:50
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
山西大同大學(xué)學(xué)報(bào)(自然科學(xué)版)(2016年2期)2016-12-12 03:19:28
中國科技信息(2016年14期)2016-07-31 21:16:32
河南科技(2014年18期)2014-02-27 14:14:58