基于機器視覺的蘋果分級方法研究
2018-10-24 06:24:48方紀昊王太良蔡永清
機電信息 2018年30期
關鍵詞:系統
陳 卓 方紀昊 王太良 李 強 蔡永清
(海南大學機電工程學院,海南海口570228)
0 引言
機器視覺技術對于蘋果分級意義重大,它使得對蘋果進行非人工分級時不僅僅只能根據大小,而可將蘋果表面是否有缺陷、果體是否完整等多項因素都考慮進來。機器視覺技術比人工分級準確性更高且更為高效。
Yang等人[1-3]開發的圖像采集系統有效處理了將蘋果從三維立體轉為二維圖像時的視覺誤差,還將拍照過程中光照不均、電信號、噪聲等產生的影響考慮了進來,有效還原了蘋果現實中的實際情況,然后直接對缺陷進行分析來完成缺陷分級。
籍保平和吳文才[4]提出了將蘋果影像進行預處理,進行閾值分割轉化為二值圖像,進而對蘋果外部缺陷進行檢測。
劉新庭等[5]提出了基于最大果寬法的最小外接圓法,用近似圖像來代替最大果寬法需要的固定圖像,雖然有一定的誤差,但有效解決了生產困難。
1 圖像采集系統的搭建
1.1 各部件的選定
相機:本系統采用了可達480 Mb/s的200萬像素工業相機RS-200A,采用大面陣CMOS圖像傳感器。
照明光源:選擇了PDOK可聚光LED燈珠環形光源OK65。光箱:采用301 mm×301 mm×357 mm的密閉光箱。背景:使用統一顏色的背景,選擇黑色的背景布。計算機:用基于MATLAB開發的圖像處理系統來進行圖像處理及后期運算。
1.2 采集系統的搭建
根據實驗目的,我們的采集系統需要達到以下要求:
(1)采集室為一個密閉光箱,這樣做是為了防止外部自然光的照射不同而產生不同的圖像,因此我們需要自己提供一個穩定的光源。
(2)獲取到的半徑與比例系數K的乘積為待測物體的半徑,因此在K值確定后,相機的位置、焦距以及光源的位置、亮度都需要固定,蘋果也需要放置在相機鏡頭的垂直位置上。
(3)背景布為統一的黑色,使待測物體與背景布差距巨大且無干擾。
根據以上要求,搭建采集系統如圖1所示。
2 實驗過程與結果分析
2.1 果徑分級標準
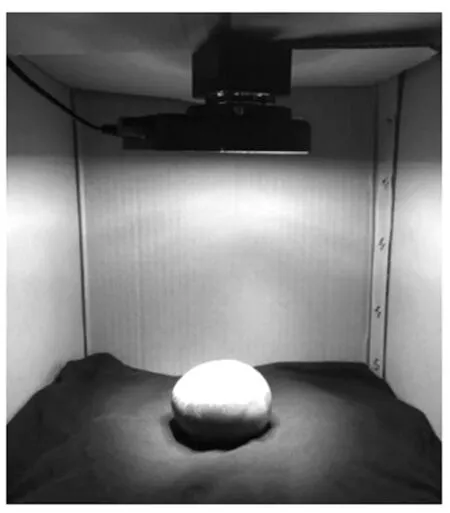
圖1 采集系統實物圖
根據GB/T 10651—2008《鮮蘋果》提供的標準,直徑≥75 mm為優等果,直徑≥70 mm為一等果,直徑≥65 mm為二等果,其余為等外果,如表1所示[6]。
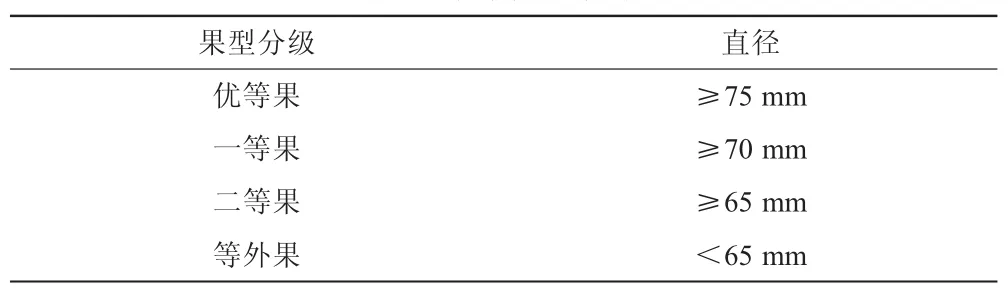
表1 蘋果分級標準
2.2 實驗步驟
(1)挑選30個果實完整、外表無缺陷、大小不均的紅富士,對其依次編號為1~30。
(2)通過游標卡尺測量果體最大橫徑,也就是實際果徑RS。
(3)通過圖像采集系統獲取測量直徑RC,將其進行果型分級。
(4)比較出兩者的差值為絕對誤差J。
(5)絕對誤差J與實際果徑RS的比值為相對誤差X。
(6)將果型分級結果與實際相比對,計算分級正確率。
如表2所示,數據表明,該圖像處理系統對于直徑測量的平均相對誤差為1.31%,其中4、14、19號蘋果分級判斷錯誤,即本圖像處理系統分級成功率有90%。
3 結語
通過在實驗室搭建的機器視覺系統,結合MATLAB所建立的圖像處理體系,能非常有效地實現蘋果的分級,機器視覺系統的測量相對平均誤差僅為1.31%,蘋果分級的成功率有90%。該系統存在的一個凸顯的問題是蘋果圖像的獲取還需要手動擺放,因此需進一步完善蘋果的擺放和運輸裝置。
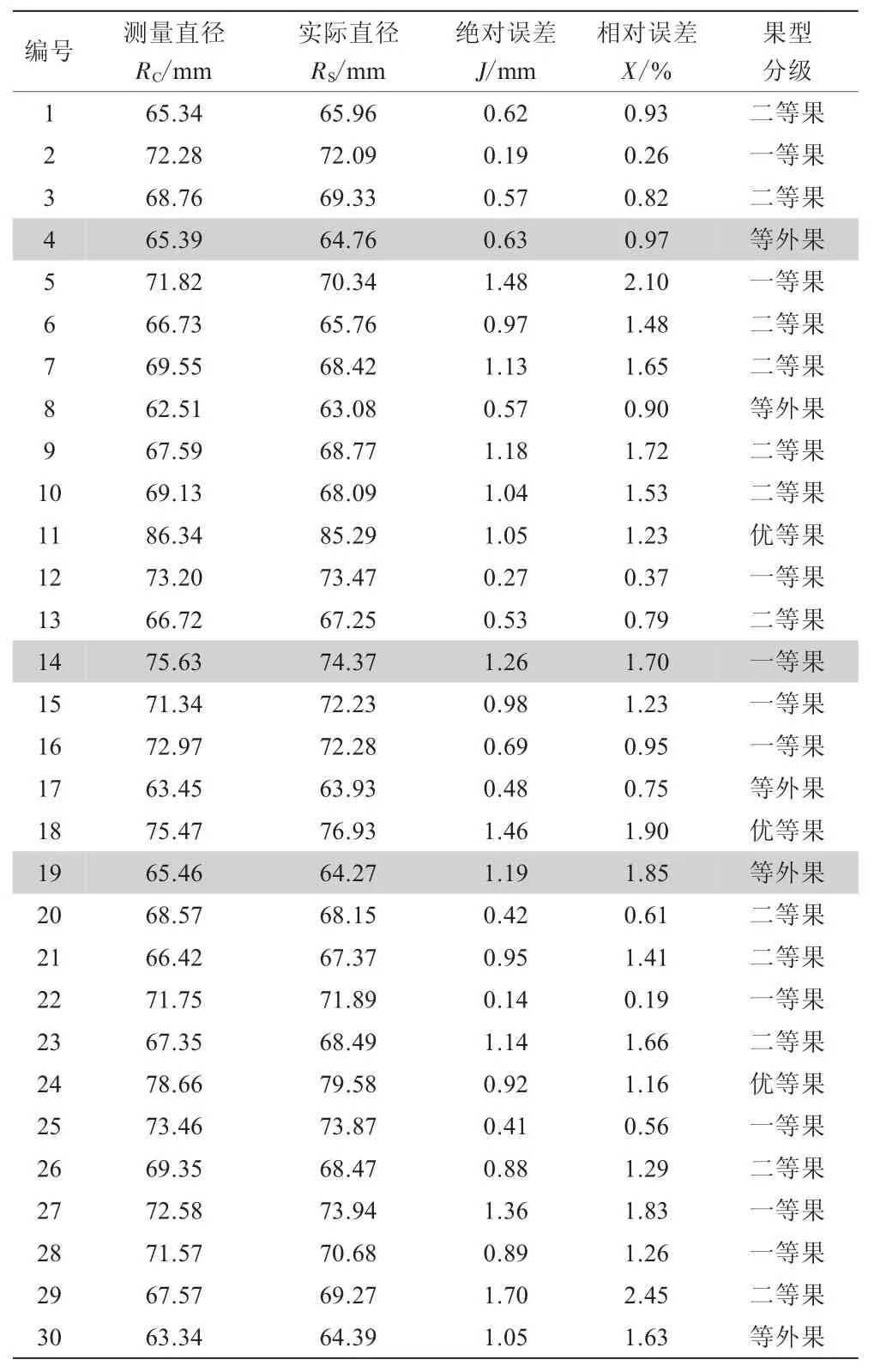
表2 實驗數據及誤差分析
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
