基于階層標識的無人機自主精準降落系統
2018-10-30 11:54:02張咪趙勇布樹輝張臻煒楊君
航空學報 2018年10期
關鍵詞:系統
張咪,趙勇,布樹輝,張臻煒,楊君
西北工業大學 航空學院,西安 710072
近年來,隨著具有體積小、重量輕、隱蔽性好等特點的無人飛行器被廣泛應用,迎來了無人機(UAV)技術大爆炸時代。其中多旋翼無人機系統更是因為結構簡單、穩定性好、起飛降落方式靈活、自身占用空間小、轉向性能良好等優點,成為民/商用及研究領域的熱門。面對越來越多的無人機民用新需求,比如動態追蹤拍攝[1]、快遞行業定點投送物品[2]等,對微型無人機的自主精準降落技術[3]提出了新的挑戰。
基于全球定位系統(GPS)導航[4]的自動降落是目前最常用的方法,但GPS引導自動降落有一定的不足。首先,不做特殊處理的GPS定位精度僅能達到10 m,對于地形復雜的區域,比如建筑群密集的城市,無人機很可能因為導航誤差在低空進近區域墜毀;其次,GPS信號受非空氣介質干擾大,在遮擋物較多的區域,比如森林,會造成誤差增大甚至信號丟失;專業級高精度GPS設備成本昂貴,不具備經濟實用性。
鑒于GPS的精度不高,有學者陸續提出了基于視覺的自動降落技術。其中,2014年上海理工大學的夏云龍等提出基于聲源時延和氣壓高度傳感器的無人機精確降落技術[5],該項技術在降落點安置聲源,在無人機上構造基于全向性駐極體麥克風的正四面體麥克風接收陣列[6],利用聲源時延技術計算無人機的俯仰角和偏航角,再通過無人機上安裝的氣壓高度傳感器感知無人機的高度,從而精確引導無人機降落。2016年南京航空航天大學吳賽飛等提出基于紅外視覺的無人機自動著陸引導系統[7],通過在無人機上設計紅外視覺識別標志,利用停機坪上的紅外相機對無人機目標進行識別和定位并完成自主降落。同年,哈爾濱工業大學樊瓏提出一種在無人機上完成所有計算的視覺定位方法[8],但此方法也需要借助超聲波測距儀測量高度,再通過機載相機尋找停機坪上黑白相間的圓環降落標志的圓心計算出無人機的位置,完成自動降落控制。
然而以上方法存在一些共同的不足:
1) 僅支持無人機和停機坪一對一關系,無法支持多無人機同時降落。但在快遞運輸定點投送物品等實際應用中,需要多架無人機同時進行配送任務,以提高工作效率。
2) 易受降落環境干擾,對降落環境要求較高,很難完成精準降落。比如紅外視覺識別標志在強光下很容易被干擾,或產生錯誤的識別。氣壓高度計極易受到溫度影響,而超聲波測距對氣溫變化和噪聲很敏感,環境因素的影響都可能導致精度不高。
3) 在完成整個自主降落的過程中,需要其他設備(比如紅外激光探測儀、氣壓高度傳感器和超聲波測距儀等[9-10])輔助完成定位、測高等任務。
為了解決上述問題,我們設計了一種多層嵌套Marker的階層降落標識,并針對該標識提出了有針對性的快速檢測識別及定位算法,實現了一套自主精準降落系統。經電腦仿真試驗和無人機自主降落試驗驗證了系統的可行性和實效性。與現有系統相比,此系統具備以下特點:
1) 無須依賴其他設備就可以完成精確的相對定位、定高、定姿態等工作。
2) 抗干擾能力強、計算效率高,可在低成本計算平臺上快速實現圖像處理、無人機位姿計算等任務。
3) 所設計的算法可以為多無人機提供定位和降落信息。
1 系統總體框架
本系統由硬件和軟件兩部分構成,系統的整體框架與流程如圖1所示。硬件部分主要包括機載攝像機、機載CPU處理器和機載飛行控制器。
對于本系統,在降落過程中將機載攝像機拍攝的實時圖像傳給機載CPU處理器進行處理,檢測并校驗停機坪上的降落標識估計無人機的位置和姿態;將相對位置、姿態信息發送給飛行控制器,從而控制無人機逐步逼近停機坪,最終實現無人機全自主降落。

圖1 系統總體框架Fig.1 Overall framework of system
2 降落標識設計
無人機降落標識為用于輔助無人機視覺定位的基礎,其設計需要滿足以下要求:
1) 特征鮮明突出,容易被識別且識別應該盡可能魯棒準確。
2) 為了能夠在不同高度,或者多尺度成功定位,其應具有多尺度識別能力。
3) 該特征能夠較好地輔助無人機進行相對定位。
為了使降落標識符合以上3點要求,提出了多層嵌套Marker的階層降落標識設計,能夠很好地解決一般情況下無人機對降落標識的需求。
Marker設計規則:每個Marker由N×N的黑白方格組成(根據編碼的容量來選擇N的大小,一般情況下N為5~7);每個Marker最外側方格顏色一致,并根據內側(N-2)×(N-2)的區域進行編碼,組成獨一無二的無符號整型編碼值(ID)。根據最外側顏色可將Marker分為白邊和黑邊兩種,對于黑邊Marker中的每個方格,白色多的是1,黑色多的是0,對于白邊Marker則相反。無人機降落標識示例如圖2所示。
如圖2(a)所示的單個Marker設計,其ID對應二進制011 101 111,即239。由于識別此Marker在4個方向上觀察不一致,為保證其唯一性,一般不允許Marker存在對稱性,同時選擇4個解析結果中的最小值作為Marker的ID,并記錄獲得最小值所在的方向,從而確定唯一的頂點順序。雖然為了滿足通用性,Marker采用了最簡單的編碼規則,但這樣的設計同樣可以滿足利用冗余信息來使得ID檢測更魯棒的需求。
為了能在多尺度上提供定位信息,停機坪上設計的降落標識由單個或多個Marker鑲嵌而成。在降落標識(本身為Marker)內嵌套設計規則相同但規格較小的Marker,所有的Marker采用統一的方格數目。嵌套Marker有很多規格,分布在階層降落標識的內部。這里的多種規格是指嵌套Marker的大小不一樣,即邊長不一樣,并且每個嵌套Marker內部的黑色、白色區域分布也是不同的,這樣每個嵌套Marker的ID互不相同。雖然多個Marker之間可以相互嵌套,但嵌套不能影響對父Marker的ID判斷,為滿足這個要求,對于父Marker的每個單元格改動不能超過三分之一。針對停機坪上設計的降落標識的中心GPS位置、各停機位Marker的ID和頂點位置已知。
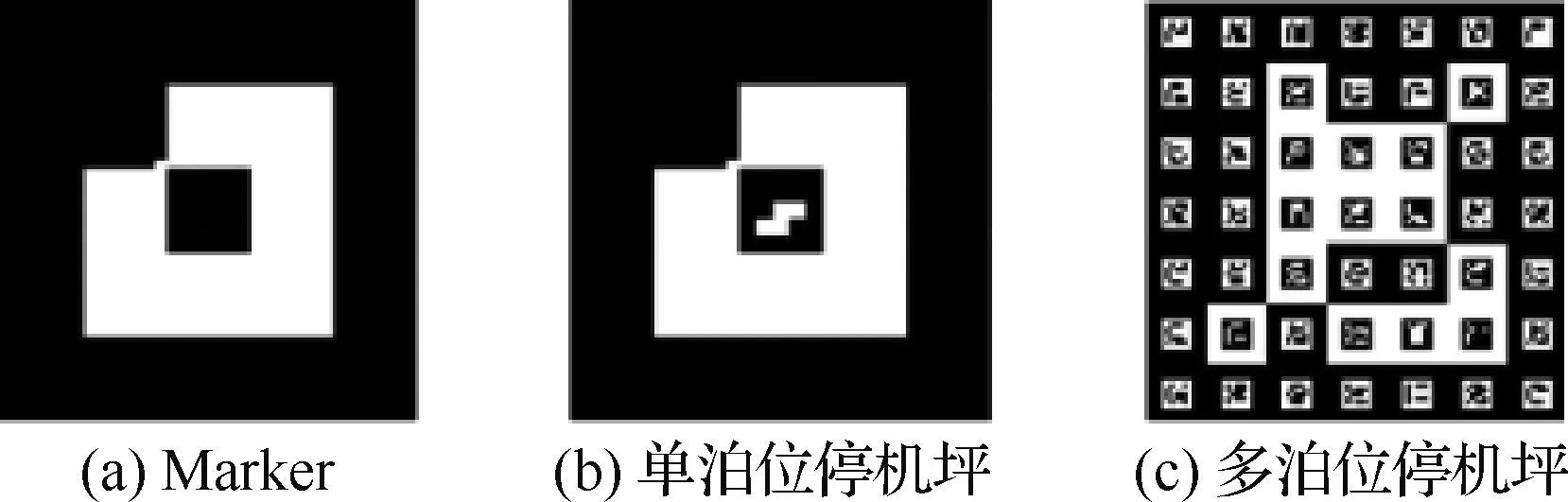
圖2 無人機降落標識示例Fig.2 Landing markers of UAVs
如圖2(b)和圖2(c)分別是為單個無人機和多個無人機泊位停機坪上設計的階層降落標識示例。圖2(b)的單泊位停機坪中,停機位采用5×5的Marker作為階層降落標識,編碼為9位。其外側大Marker的ID對應數字為239,內側Marker對應二進制000 011 110,即30。對于圖2(c) 的多泊位停機坪,每個停機位采用7×7的Marker作為階層降落標識,編碼為25位。多泊位停機坪采用漢明編碼[11],可以保證在每行出現一個二進制錯誤時給予糾正,同時也保證ID之間至少存在每行一個以上的二進制不同,相當于文本所用編碼中的多個編碼可被看做同一個編碼,并映射到統一的頂點。
3 自主精準降落算法
如圖3所示,當無人機接收到飛行控制的降落指令(停機坪GPS位置信息、無人機待降落停機位Marker ID),到達設定的停機坪發現域(停機坪上方半徑3~10 m的空域內)準備降落時,系統啟動自主降落程序,通過邊緣檢測和輪廓提取、確定候選停機位Marker、檢測并校驗Marker ID、實時位姿估計等步驟完成無人機精確降落。
步驟1邊緣檢測和輪廓提取
無人機到達停機坪發現域后,以固定速率邊下降邊利用機載攝像機不斷拍攝采集實時圖像,并將其轉化為灰度圖,利用Canny算子或自適應閾值方法[12-13]得到二值化的邊緣分布圖,利用腐蝕膨脹等算法[14-15]進行濾噪,然后提取圖像的輪廓信息(包含停機坪以及停機坪內所有停機位Marker的輪廓)。
步驟2確定候選停機位Marker
對于得到的輪廓信息,濾除兩類輪廓:① 停機坪中停機位Marker內部必定會有其他輪廓,因此將所有內部無子輪廓的輪廓去除;② 構成輪廓的像素點個數應超過一定數量,以去除噪點的干擾。對于剩下的輪廓,選取外部為凸四邊形的輪廓作為候選停機位Marker,并求取其4個頂點在圖像中的坐標。
步驟3檢測并校驗Marker ID

圖3 自主精準降落算法流程圖Fig.3 Flow chart of algorithm of autonomous precision landing
對每一個候選停機位Marker,將其通過射影變換映射到固定大小的方形區域,其中方形區域的大小應為N的整數倍,一般寬高都為4×N個像素,這樣對于每個方格都存在16個像素點用于二進制統計。將候選停機位Marker映射到方形區域后,利用計算復雜度低、效率高的K-Means算法[16]將區域內的像素進行二值化并進一步利用二值化后的圖像進行解碼(白色多為1,黑色多為0),得到一個N×N的二值矩陣。對于二值矩陣,首先判斷其最外圈是否為全0或全1,不滿足則認為此候選停機位Marker不正確,直接丟棄。然后根據內側(N-2)×(N-2)區域可以解碼得到候選停機位Marker的ID及朝向信息。將候選停機位Marker的ID與無人機接收到的降落指令中待降落停機位Marker的ID進行匹配,選擇匹配成功的候選停機位Marker作為待降落停機位Marker,否則停機位Marker定位失敗。
步驟4實時位姿估計
實際應用中在地面上選定并繪制停機坪時,停機位Marker的空間位置及大小是已知信息,即已知待降落停機位Marker在三維空間的頂點坐標,根據一系列三維點和圖像二維點的對應關系,結合相機參數對無人機相對于待停機位Marker坐標系的位置和姿態進行求解。
圖4為相機投影模型,對于世界坐標系中某個坐標為(XW,YW,ZW)的三維空間點P,利用相機位姿R、t(R為旋轉矩陣,t為平移向量)將其轉化為相機坐標系下的點P′(XC,YC,ZC):
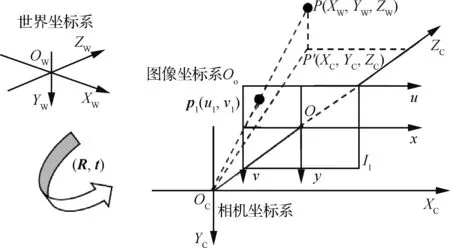
圖4 相機投影模型Fig.4 Projection model of camera
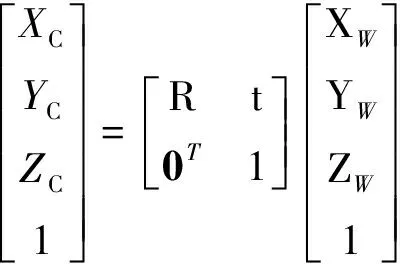
(1)
已知相機內參K,將點P′投影到圖像I1上,得到圖像特征點坐標向量[u1,v1,1]T(以歸一化平面齊次坐標表示)為
(2)
式中: (u0,v0)為主點的坐標;fx和fy分別為x和y方向的焦距。
假設某個Marker頂點的三維空間點坐標向量為Pi=[Xi,Yi,Zi]T,其投影到圖像上的像素坐標向量為pi=[ui,vi]T,根據圖4的相機投影模型可得到像素位置與空間點位置關系為
(3)
式中:si為圖像上二維像素點向量pi在相機坐標系下的深度,矩陣形式為
sipi=K(RPi+t)
(4)
由于相機位姿R、t未知以及觀測點pi的噪聲,式(4)的等式存在誤差。因此,為了尋找最好的相機位姿,構建最小二乘問題,使誤差最小化為
(5)
此最小二乘問題的誤差項,是將Marker頂點的像素坐標(觀測到的圖像投影位置)與其三維空間點按照相機模型得到的投影位置相比較得到的誤差,稱之為重投影誤差。通過Levenberg-Marquardt(LM)優化算法[17]迭代優化最小二乘問題求得無人機此時最優相機位姿R、t。
步驟5無人機飛行控制
根據無人機與待停機位Marker坐標系相對位置關系調整無人機的Yaw方向(繞Y方向旋轉,即偏航角),并不斷下降。
無人機降落到一定位置時,停機位Marker已經不能完全呈現在相機平面內,此時嵌套Marker起作用,無人機只需要按照步驟2和步驟3的Marker ID解析算法,進行嵌套Marker的ID匹配即可(該停機位Marker內的嵌套Marker)。
為了讓無人機保持較好的控制效果,不同階段采用不同的控制方式。當無人機降落到一定高度時,圖像定位效果較好,即使進行一些運動調整也不容易發生定位失敗,因此采用比例-積分-微分(PID)控制器[18-19]進行速度環控制,使得無人機始終跟隨平臺進行速度調整運動。而當無人機降落高度過低,來不及進行位置調整時,為了保證無人機能較平穩精準地降落在停機坪上,特別對于移動降落平臺,采用PID控制器對加速度環進行控制,從而完成精確降落。
停機位Marker定位失敗有兩種情況:① 確定候選停機位Marker時未找到符合篩選條件的凸四邊形輪廓;② 找到候選停機位后,未檢測或識別到待降落停機位Marker ID。
定位失敗后,無人機盤旋數秒捕獲實時圖像,若仍無法完成準確定位,無人機攀升并不斷嘗試重新對停機位Marker定位以完成降落。
4 試驗結果
4.1 仿真驗證
為了測試本文的無人機自主精準降落系統,首先在PC機上對從圖像數據獲取、算法實現到閉環控制整個過程進行了完整仿真測試。其中整個仿真系統主要包含無人機動力學仿真、視景仿真、算法模塊封裝和數據可視化4部分。
1) 無人機動力學仿真
采用無人機剛體動力學仿真模擬無人機實體及飛控部分。無人機的受力主要分為重力、空氣作用力和無人機推力。重力在世界坐標系下始終不變,空氣作用力由無人機速度和風速決定,設定一個高斯過程,絕對值不超過1.5 m/s的風擾動,算法給出的控制決定無人機推力。無人機動力學仿真模塊以100 Hz的固定頻率進行加速度、速度和位置、姿態等關鍵參數的更新。
2) 視景仿真
模擬攝像頭采集過程。假設攝像頭安裝在無人機機體正下方視角向下,根據無人機動力學仿真的實時位姿及攝像機內參實時渲染得到虛擬的攝像頭曝光圖片。
3) 算法模塊封裝
將信息輸入接口、控制輸出接口和核心算法部分封裝成統一模塊,代碼復用方便開發,并避免移植中的錯誤。
4) 數據可視化
使用Qt和OpenGL完成整個自主降落系統的三維可視化分析[20],實現無人機位置、實時渲染圖片、風速方向和算法位姿估計與控制輸出等部分的可視化,方便觀察整個系統流程。
圖5是針對圖2(b)設計的降落標識,無人機模擬自主降落仿真系統的界面顯示,其中上側四旋翼無人機是無人機當前真實位姿,左下角是仿真渲染得到的圖像及算法處理檢測到的Marker標記,中間朝向下的視角框表示算法計算得到的無人機位姿,正下方是世界坐標系下擺放的降落板及模擬的當前風速表征線。從圖5(a)側視圖和圖5(b)俯視圖可以看出此時降落高度已完全檢測和識別停機位的所有Marker(包括嵌套Marker),無人機的位姿估計比較準確。
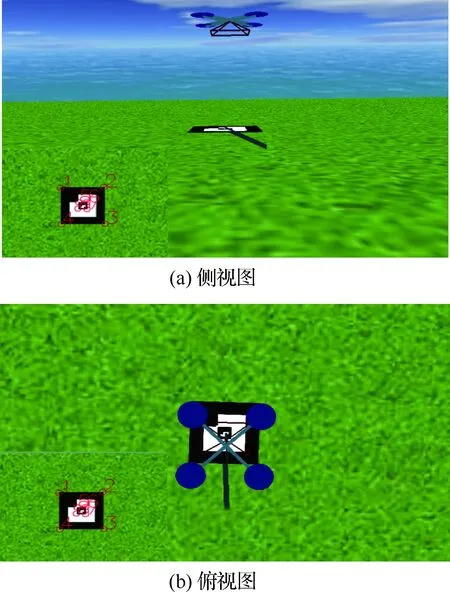
圖5 自主降落系統仿真驗證Fig.5 Simulation verification of autonomous landing system
4.2 自主降落試驗驗證
為測試算法在真實環境下的性能特性,搭建了試驗環境,并進行多次測試。所采用的無人機是自己組裝的四旋翼,飛控硬件采用Pixhawk,飛控軟件采用APM,飛機上裝載一個NanoPi2(1.4 GHz四核A9處理器搭配1 G內存)作為視覺計算平臺,飛控和計算機之間通過UART接口通信,相機為VGA(Video Graphics Array)分辨率的USB相機。
手動控制無人機起飛,到達指定空域(相機視野內出現停機位),開始進入自主精準降落程序,相機將得到的含有降落標識(Marker)的圖像信息傳送給視覺計算平臺,實時計算出無人機與Marker的相對位置關系,將相對位置坐標傳入飛控系統,飛控控制無人機飛行完成整個自主精準降落過程。在下降過程中,圖像采集頻率是30 幀/s,分辨率是640×480。
圖6分別展示了本系統無人機在地面固定位置和在移動車頂降落的試驗。地面和車頂上放置的降落板上的降落標識如圖2(b)所示。試驗部分具體采用如下硬件配置:

圖6 四旋翼無人機自主降落試驗驗證Fig.6 Autonomous landing test verification of quadrotor UAV
1) 機架與飛控
采用如圖6(a)和圖6(b)中的設計,在機架最外側4個機臂下安置腳架,盡可能讓無人機在各種降落平臺保持穩定。而為了讓算法直接省略對姿態中Pitch(繞X方向旋轉,俯仰角)和Roll(繞Z方向旋轉,滾轉角)的計算,飛控將通過串口實時發布最新姿態信息,并接受算法輸出的控制指令完成相應動作。
2) 攝像頭
對于自主降落系統,對圖像分辨率要求不高,但幀率越高越好,并要求適應各種光線情形。圖像采集部分使用OV2710芯片為核心的廣角USB攝像頭模塊,其特點是在低照度的環境下成像效果較好,并且分辨率為640×480時,幀率最高達到100 Hz。
從圖6(a)和圖6(b)中可以看出無人機成功并準確地降落到降落板上。圖6(c)和圖6(d)是在車頂上搭建了移動降落平臺,并進行了多次降落試驗,無人機都能很好地降落到車頂。
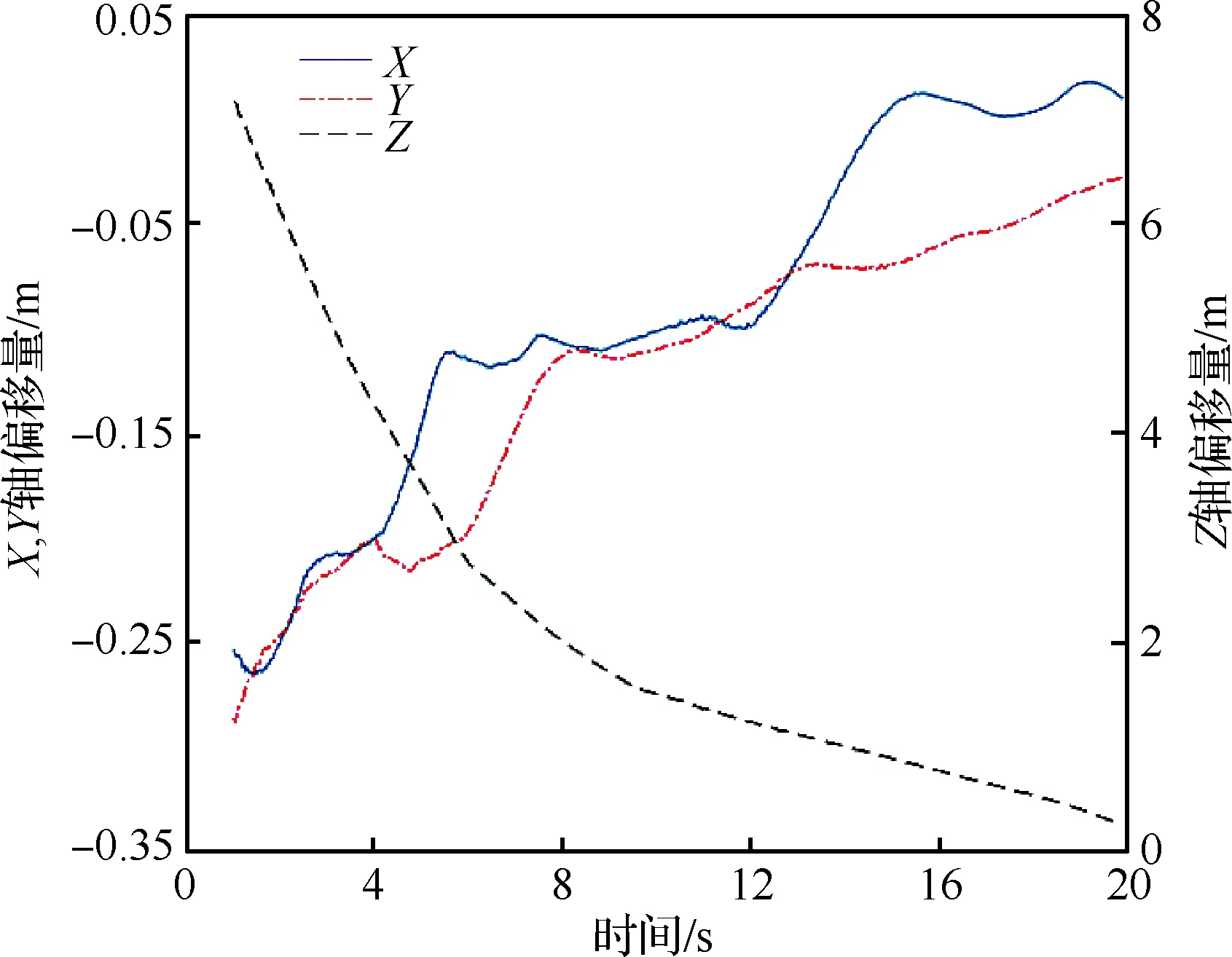
圖7 無人機相對位置變化圖Fig.7 Variation of relative positions of UAVs
靜止降落試驗進行了20次,圖7是某次靜止降落試驗中,無人機在位于7 m高度下降時20 s內X、Y、Z方向相對于起飛點的偏移量,可以看出自主精準降落算法得到的相對位移量隨著高度的下降呈變小趨勢,當無人機到達地面時,水平和垂直方向偏移量能達到10 cm以內。經過統計20次試驗的偏移量,發現總體偏離誤差不超過 10 cm,相比紅外等降落標志易受強光、溫度或灰塵等影響,本系統不易受光照、溫度、噪聲等環境因素干擾。即使受風影響,也只有在少數情況下偏離誤差會超過10 cm,如圖8所示。
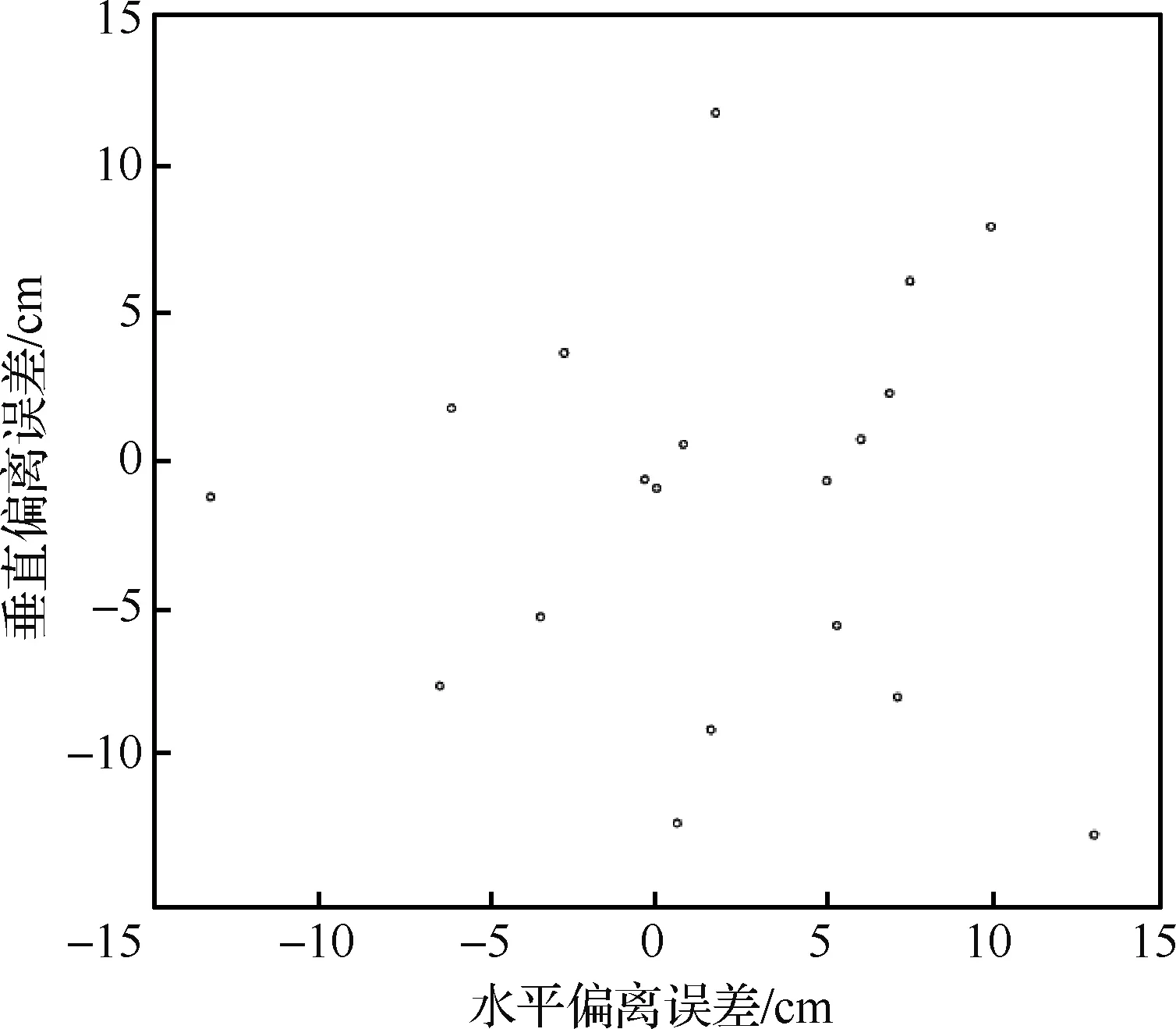
圖8 靜止降落試驗總體偏離誤差散點圖Fig.8 Total deviation error scatter of static landing test
4.3 系統性能分析
為了評估本文自主精準降落系統的性能,在NanoPi2機載運算平臺上對系統各部分的時間消耗進行統計,如表1所示。從表中可以看出系統的效率非常高,邊緣輪廓提取部分因為其處理了大量像素點,耗時最長,其他的部分都只是對少量數據進行處理,故耗時相對較短。

表1 系統工作時各部分在NanoPi2的耗時統計Table 1 Statistics of time duration of each part of system in NanoPi2
5 結 論
1) 本文提出的階層降落標識采用多層嵌套的Marker,很容易被檢測識別,并能夠在多尺度上提供其定位信息,且可以達到更魯棒的需求。
2) 在進行充分的仿真試驗和實飛測試后,證明了本文提出的無人機自主精準降落系統不易受到環境干擾,其魯棒性和效率較高,且對計算性能要求極低,可為多個不同無人機同時提供精準降落服務。
3) 本文提出的自主精準降落系統依托于階層降落標識進行相對定位,忽略了其他環境信息。后期可綜合考慮其他環境紋理信息,更魯棒地提供更準確的定位信息。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32