矢量場逐次逼近的康復機器人柔順交互控制
2018-11-01 08:02:22謝光輝金敉娜王光建吳曉金
自動化學報 2018年10期
謝光輝 金敉娜 王光建 吳曉金
近年來,腦卒中的發病率在全球范圍內有逐年增加的趨勢,而病例中最常見的是運動功能障礙,其將嚴重影響患者的日常生活,故如何恢復患者的運動能力是治療中需要解決的首要問題之一.針對此問題,臨床治療中一般采用人工輔助訓練和機器人輔助訓練兩種方式,但前者存在過度依賴治療師、訓練強度/時間無法保證、成效低等缺點,而后者卻具有治療師負擔減輕、訓練項目可調、效率高等諸多優點.因此,國內外對機器人輔助訓練新設備、新技術進行了大量研究,催生機械結構多樣、控制方法各異的康復機器人[1?5]相繼問世,其臨床應用亦表明機器人輔助訓練能促進患者的運動能力恢復[6?8].但另一方面,應用中亦發現機器人在機械機構和控制方法上的表現還不太令人滿意,特別是在人–機柔順交互控制方面亟待有所突破.目前,康復機器人輔助訓練的模式主要有被動訓練和主動訓練兩種[9].前者主要針對早期肌力比較弱且自身運動較困難的患者對癥施治,其下肢運動易于通過常規的機器人軌跡跟蹤控制實現;后者主要應用于具有一定運動能力患者的自行訓練,即機器人系統依據患者的主動運動意圖,采用柔順交互控制技術來提供輔助作用力給患者進行訓練.而對于患者主動運動意圖的獲得,Pons[10]提出通過識別人–機相互作用力來得到患者的主動運動意圖;佟麗娜等[11]采用識別表面肌電信號(Surface electromyogram,sEMG)的方法獲得了下肢運動意圖;Artoni等[12]提出一種腦電信號(Electroencephalogram,EEG)處理方法,可獲得患者較準確的主動運動意圖.事實上,無論采用哪種信號,關鍵是所構建的人–機柔順交互控制策略能否有效地識別信號并獲得患者真實的主動運動意圖.對于人–機柔順交互控制策略的構建,國內外一些學者采用基于力信號的阻抗控制(Impedance control)[13]對康復機器人進行研究并取得了一定成績.比如,Riener等[14]設計了阻抗控制器并成功亦應用于LOKOMAT康復機器人中,且通過實驗驗證了該控制方法的有效性;孫洪穎等[15]采用阻抗控制策略在一定程序上實現了臥式下肢康復機器人主動柔順控制;徐國政等[16]提出了基于力的模糊自適應阻抗控制策略,實現了人機相互作用力的控制.但在實際運用阻抗控制策略時,首先得根據人的運動軌跡(意圖)來規劃機器人的參考運動規跡,從而生成機器人期望規跡.然而康復機器人在工作過程中,不通過特定而有效的識別方法是很難獲得人真實運動意圖的.因此,目前用阻抗控制策略來實現較高的人機柔順交互還有一定的難度.另外,研究者們利用生物產生節律運動的中樞模式發生器(Central pattern generator,CPG)[17?19]原理構建神經元振蕩器,并將其用來識別力信號或表面肌電信號.吳德明等[20]利用神經元振蕩器來識別人–機相互作用力以獲得人的運動意圖,實現了人和機器人握手的自然交互;彭亮等[21]亦利用神經元振蕩器對下肢表面肌電信號進行識別,獲得了患者的運動意圖,成功實現了下肢康復機器人的柔順交互控制.以上研究之所以能實現人機柔順交互,主要是因為神經元振蕩器具備輸入輸出同步特性,其可用來識別并同步力信號或表面肌電信號,但其內部有許多參數相互耦合,不易找到合適的參數匹配來實現同步,而且它只適合周期運動情景.為進一步探索實現康復機器人和人之間柔順交互的較簡單控制方式,謝光輝等[22]曾利用大腦信息處理的非線性動力學機理[23]設計了矢量場逐次迭代算法,但僅通過仿真簡單地驗證了該算法在助力機器人控制上的有效性.有鑒于此,這里針對康復機器人輔助訓練模式的特點,擴展該算法提出了一種康復機器人柔順交互控制模型,其既可用于被動訓練,又可用于主動訓練,且在主動訓練中可通過識別力或生物醫學信號來獲得患者的運動意圖.同時,為驗證該模型的有效性,自行設計了新穎的穿著型下肢康復機器人做為實驗研究平臺.
1 柔順交互控制模型
矢量場逐次逼近的康復機器人柔順交互控制模型如圖1所示.其中,矢量場逐次逼近系統的合理設計是關鍵,其需具備輸入輸出同步特性.該模型控制策略為:當康復機器人施行輔助訓練時,由傳感器檢測的機器人關節扭矩經重力補償或生物醫學信號(包括sEMG 或EEG 等)經濾波、歸一化[11?12,21]等處理后作為矢量場逐次逼近系統的輸入.由于該矢量場系統具有同步特性,其會識別輸入并輸出在振幅、頻率及相位上與輸入信號保持同步的關節期望位移θR,從而獲得人的運動意圖.同時,采用PD(Proprtion derivative)控制來實現機器人各關節的實際位移θR與期望位移θd的跟隨,以實現機器人與人的柔順交互.另外,通過調節系統的各參數值,既可改變主動訓練的柔順性,又能由主動訓練轉換到被動訓練.
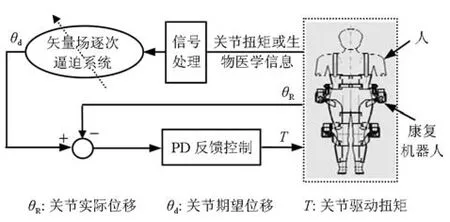
圖1 柔順交互控制模型Fig.1 Compliance interaction control model
1.1 矢量場逐次逼近系統
矢量場逐次逼近系統的算法原理是在任意的機器人目標軌跡(吸引子)周圍設計矢量場,然后用逐次逼近的多項式去近似它,最后得到高度非線性且具備自振動特性和輸入輸出同步特性的矢量場逐次逼近系統.該算法的設計進程如下:
1)如圖2所示,任意構建一目標規跡(吸引子)F,其為時間的離散函數,各離散點如下:

2)如圖3,在區域D內設計從任意樣點Xh指向目標軌跡F的單個矢量Vh(h=1,2,···,s),其定義如式(2)所示,類似這樣的多個矢量組成矢量場.

這里,X[k]表示位于目標軌跡F上且距點Xh最近的點;α(0≤α≤1)決定矢量Vh收斂于目標軌跡F的程度,且其值越小,Vh收斂于F的速度越快.
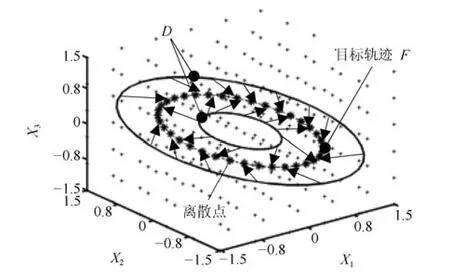
圖2 矢量場Fig.2 Vector field
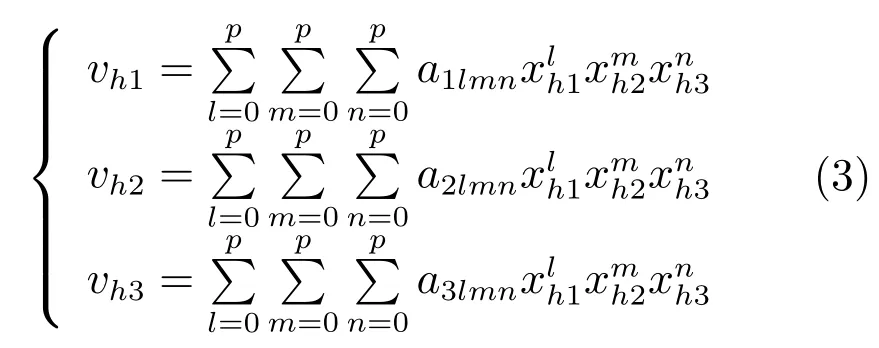
3)對于式(2)所提出的矢量Vh,可以用多項式去近似它.當X∈R3,設該多項式如下:
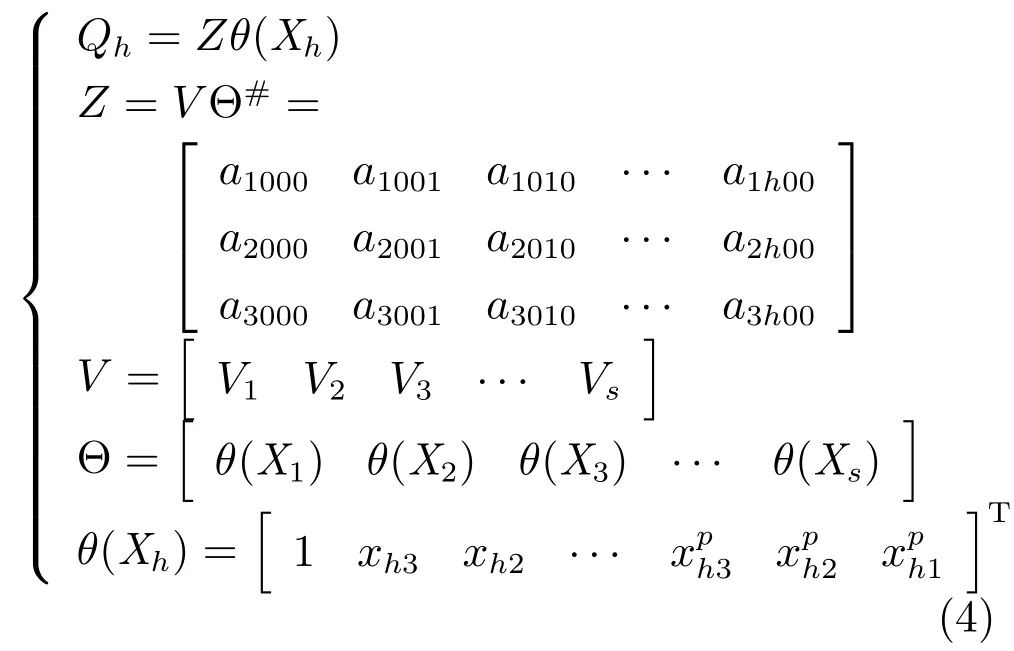
4)為使系統具備記憶與學習能力,如式(5)所示,對矢量場進行逐次逼近設計.
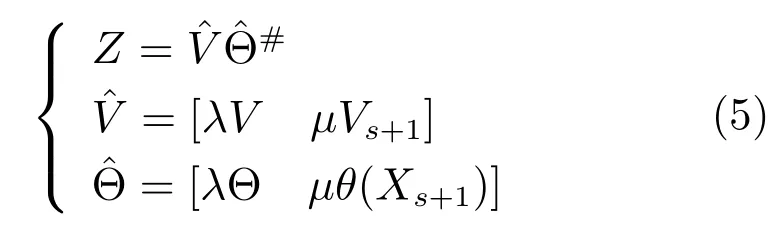
這里,Xs+1表示扭矩輸入信號并作為新樣點,Vs+1表示與樣點Xs+1相對應的矢量(按圖3建立),λ為遺忘因子,μ為同步閾值.取0≤λ≤1、0≤μ≤1,并采用最小二乘法可得:
這里,Zs+1表示更新后的多項式系數矩陣.

圖3 矢量定義Fig.3 Vector definition
所設計的矢量場逐次逼近系統,當某一時刻有新的檢測信號Xs+1輸入時,原矢量場V將被更新到新矢量場,這樣系統的多項式系數矩陣Z將被輾轉到新的Zs+1,以得到與矢量Vs+1相近似的多項式Qs+1,再根據式(2)計算出與Xs+1相近的輸出信號;同時該輸出信號與輸入信號能取得同步,且同步程度可由遺忘因子和同步閾值進行調節.
1.2 特性分析
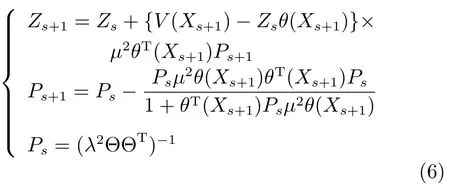
不失一般性,根據第1.1節的進程1)構建如式(7)所示的吸引子,并基于此分析上述矢量場逐次逼近系統特性.
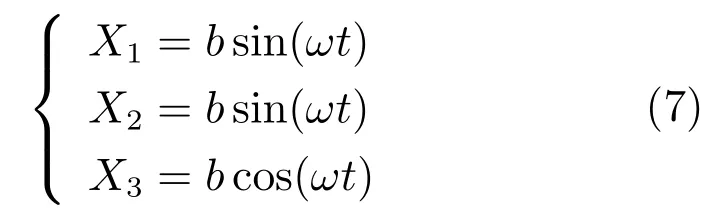
式中,b為振幅;ω為角速度.
1)自振動特性
為分析矢量場逐次逼近系統的自振動特性,首先根據式(7)構建如圖4所示的吸引子1和吸引子2,且在頻率和振幅上將前者設計成比后者大,從而得到兩個不同的的矢量場系統V1和V2.然后,將V1和V2各自的同步閾值μ都設為零,而遺忘因子在0~1范圍內取任意值.從圖5可看出V1和V2都能自動輸出振蕩波,且這些波形在頻率和振幅上各不相同,可稱之為自振動特性.該特性可為康復機器人根據具體情況定制不同參考軌跡,以用于患者進行被動訓練.
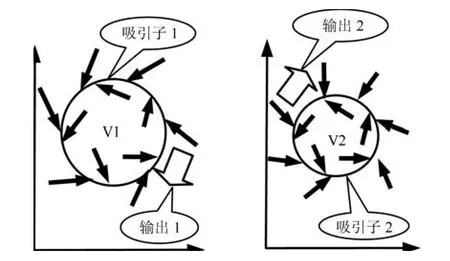
圖4 不同矢量場設計Fig.4 Different vector field design
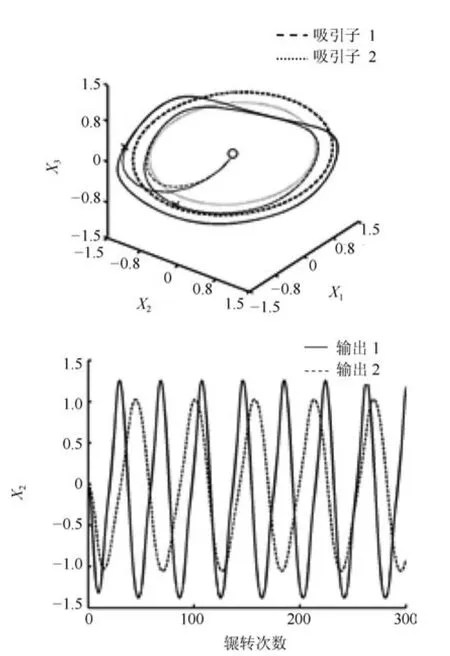
圖5 不同矢量場的輸出Fig.5 Output of different vector field
2)輸入輸出同步特性
當0<μ≤1且恒定時,矢量場逐次逼近系統具有輸入輸出同步特性,即輸出波隨輾轉次數的推移逐漸與輸入波在頻率、振幅及相位上取得同步,輸入輸出同步程度由λ大小決定,且當λ越小時輸入輸出信號更易趨于同步,這可從如圖6(a)~(b)得出.

圖6 取不同參數λ和μ時輸入輸出信號Fig.6 In-out signal with differentλandμparameters
此特性在應用中可將柔順交互控制模型中的經信號處理模塊處理后的信號作為輸入,而矢量場逐次逼近系統的輸出作為機器人的期望位移θd,以用于康復機器人主動訓練,使機器人跟隨患者的運動意圖給予一定輔助力并同步運動.
2 實驗與分析
2.1 實驗平臺及方法
1)實驗平臺
為驗證第1節所提出控制方法在康復機器人主動訓練中的有效性,根據人體下肢的運動特點,設計了如圖7(a)、(b)和(c)所示的一種穿著型下肢康復機器人,該機構由左右兩部分組成,每部分都有髖關節和膝關節各一個.為適應不同身高的人,將各連桿尺寸設計為可調.
圖7(d)為關節位置示意圖,左右腿各有5個自由度.其中,髖關節有4個自由度(子關節),標記為1、3、4和5,分別用作大腿屈伸、旋轉、上下移動和內收外展功能;膝關節有1個自由度,標記為2,用于小腿屈伸.另外,除關節3、4、5外,關節1和2都配置有扭矩傳感器和旋轉編碼器.
由于本康復機器人膝關節只有一個自由度,結構較簡單,且驅動方式為通用的電機直驅型式,故這里只給出如圖7(e)所示的髖關節結構示意圖.圖7(e)中,關節1由編碼器、驅動電機、諧波部件、錐齒傳動部件和減速箱組成,腿支架由錐齒傳動部件帶動旋轉;軸承固定在腰支架上,與搖臂一起組成關節5,可繞腰支架旋轉;減速箱與搖臂滑動配合,使關節1既可沿搖臂上下直線滑動,又可繞搖臂旋轉.
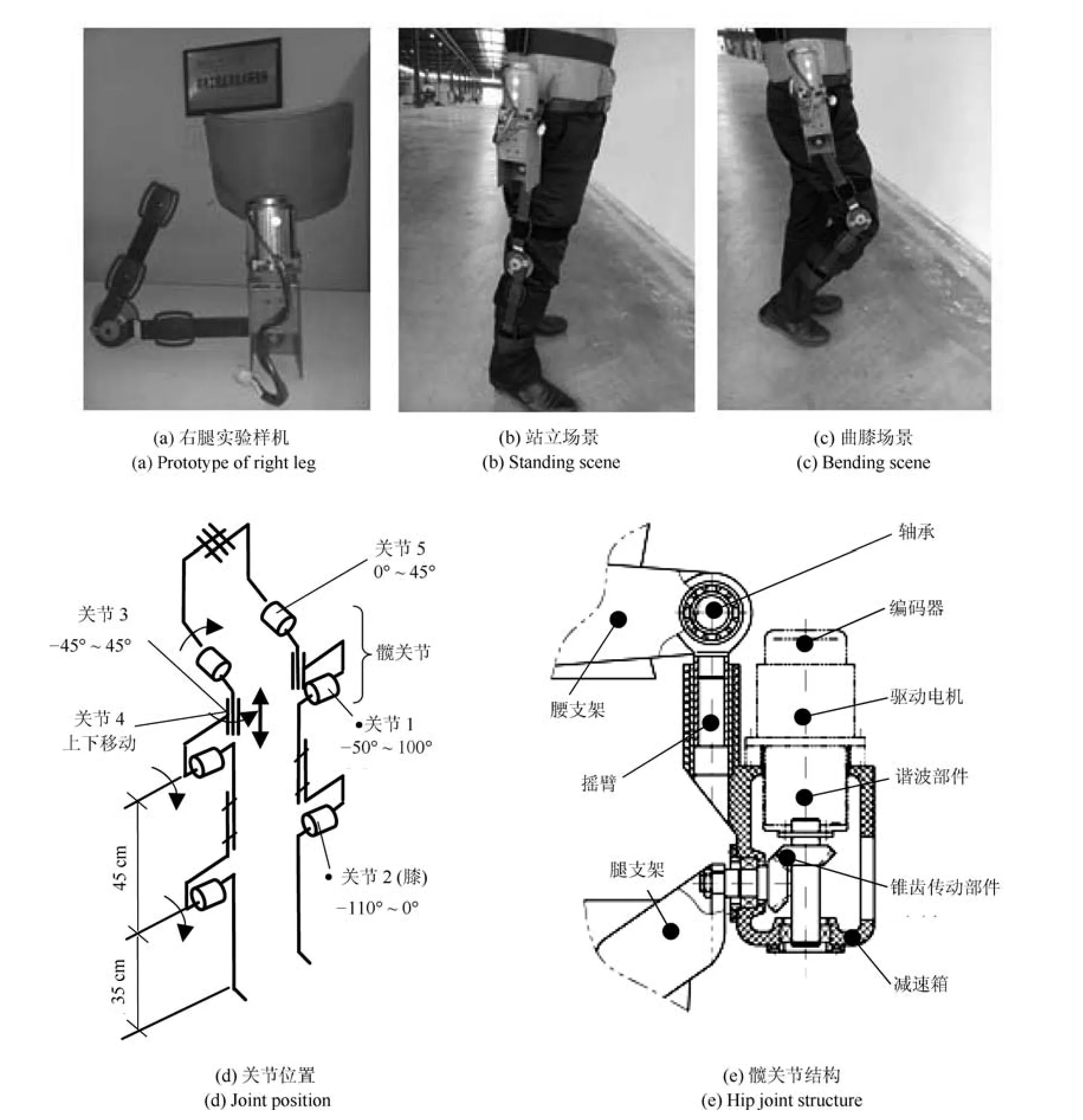
圖7 實驗平臺Fig.7 Experimental platform
2)實驗方法
在進行康復機器人主動訓練實驗時,將上述設計的康復機器人通過繃帶綁在人大腿和小腿上,并根據穿戴人的腿長短進行位置調整.
不失一般性,這里以髖關節為例來驗證第1節所提出的矢量場逐次逼近的柔順交互控制方法在康復機器人輔助訓練中的有效性.如圖8所示,康復機器人輔助訓練時所產生的關節扭矩被應變片檢測出來,經信號放大器放大和A/D模數轉換后傳于計算機,然后經重力補償(在第2.2節詳述)后得到由于相互作用而產生的關節扭矩信號,并將其作為輸入信號輸入到矢量場逐次逼近系統,從而輸出關節的期望位移(角度).機器人髖關節的實際轉角位移由編碼器進行檢測,所檢測數據經插于計算機里的計數器板卡傳入計算機.而后,利用關節的期望位移和實際轉角位移數據,通過PD控制計算后,計算機輸出脈沖控制命令經D/A數模轉換后來驅動電機轉動,以實現實際轉角位移與期望位移的跟隨.
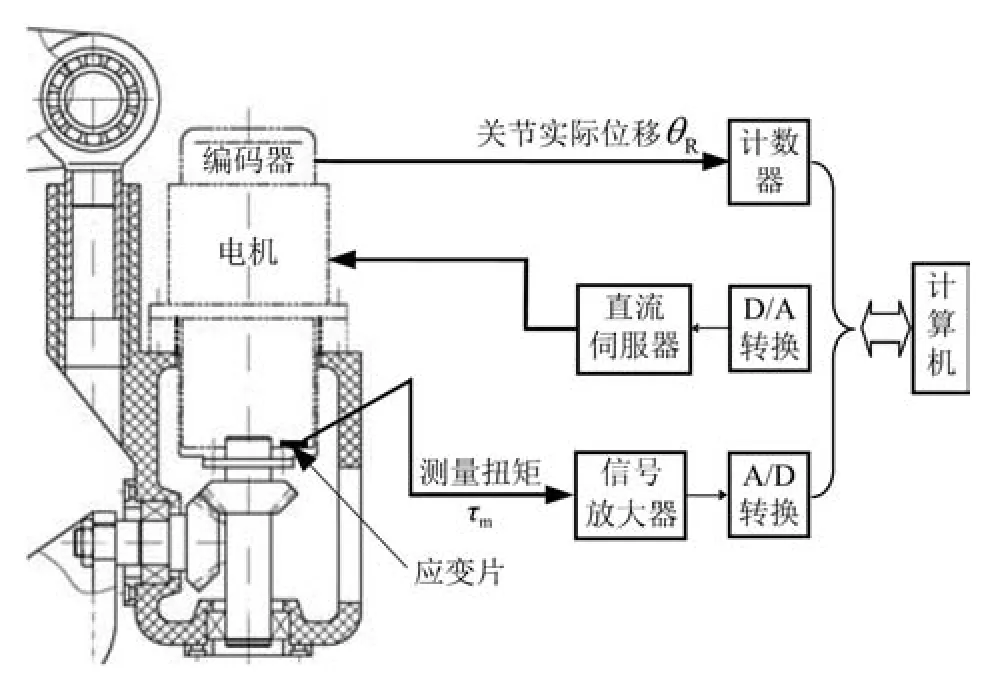
圖8 控制系統硬件框圖Fig.8 Hardware block diagram of control system
2.2 扭矩檢測及分析
1)扭矩檢測
為盡量減小康復機器人的體積和重量,各關節皆采用扭矩嵌入式檢測的諧波部件[24]作為減速裝置,該技術已在機器人關節中得以應用,被檢測扭矩的線性精度可達±0.5%FS.
該諧波部件的扭矩檢測原理如下:如圖9所示,在諧波部件柔輪橫隔壁的長軸上布置S1和S2一對應變片,短軸上布置S3和S4另一對應變片,每對應變片與半徑方向呈45?布置.這樣,法向應力可以通過惠斯通電橋相互抵消而只檢測到有用的剪切應力信號.各應變片所產生的信號如式(8)所示:
式中,δ1、δ2、δ3和δ4分別表示 S1、S2、S3和 S4應變片所產生的應變;δ12、δ34表示扭矩所產生的信號;ξ1=ξ2=Asin(2s?)為諧波函數所定義的調制信號;A為振幅;?為旋轉角度;s為齒輪配合系數,其表達式為s=(1?1/R),R為諧波齒輪減速比.
由式(8)可知,兩對應變片在長軸和短軸方向上所產生的+ξ1和?ξ2信號是兩個振幅相同但相位相反的信號,它們可以相互抵消,從而只檢測到扭矩所產生的信號,然后將其通過放大器放大可得到關節的扭矩τm.
圖9 控制系統硬件框圖Fig.9 Hardware block diagram of control system
2)扭矩分析
由于在實際應用中傳感器所檢測到的機器人關節總扭矩包括重力矩、慣性矩、哥氏/離心力矩和人–機相互作用力矩等4成分,而矢量場逐次逼近系統的輸入信號只需要人–機相互作用力矩,所以有必要把其他成分從總扭矩中分離出去.
對于重力矩,它的分離可采用重力補償等方法來處理,而慣性矩和哥氏/離心力矩較難處理,但利用快速傅里葉變換(Fast Fourier transformation,FFT)對關節扭矩信號中各成分進行如圖10所示的頻譜分析后發現:哥氏和離心力矩相當小,對運動的同步影響較小;慣性扭矩主要包括5Hz以上的較高頻率成分,而在輔助訓練時,這些高頻成分對產生運動同步的頻率段(一般在0.2Hz~3.0Hz范圍內)亦不會造成大的影響.
以上扭矩成分解析結果表明:當康復機器人進行訓練時,傳感器所檢測的關節扭矩只需直接減去相關重力矩就可作為矢量場逐次逼近系統的輸入.
3)重力補償
式中,mk表示連桿k的質量;g為在基坐標系中的重力加速度向量;0Tk為第k坐標系相對于基坐標系的齊次變換矩陣;qi表示機器人第i關節的角度;kpk為連桿k的質心距離.
圖10 關節扭矩的FFT分析Fig.10 FFT analysis for joint torques
從式(9)可知,要計算機器人腿髖關節和膝關節重力矩,必須事先知道它們各自的mkkpk參數值,而采用常規的計測方法難以獲得該參數的較準確值,有必要對其進行參數識別.這里采用最小二乘法對該參數進行不解體實驗辨識,其方法如下:
對于圖7所示的下肢康復機器人髖關節1和膝關節2,由傳感器檢測的關節實際扭矩樣本τ m(q)可用式(10)表示如下:
式中,n表示實驗中各關節實際扭矩測量的樣本次數,為髖關節1的第k次測量扭矩樣本數據,為膝關節2的第k次測量扭矩樣本數據.

在按上述方法進行的參數識別實驗中,從垂直位置到水平位置選取機器人腿的60個不同姿態,即取式(11)中n=60.對于每個姿態,在機器人處于靜止狀態下對各關節扭矩和角度值進行實測.這樣,可得各關節連桿的參數mkkpk如表1所示.
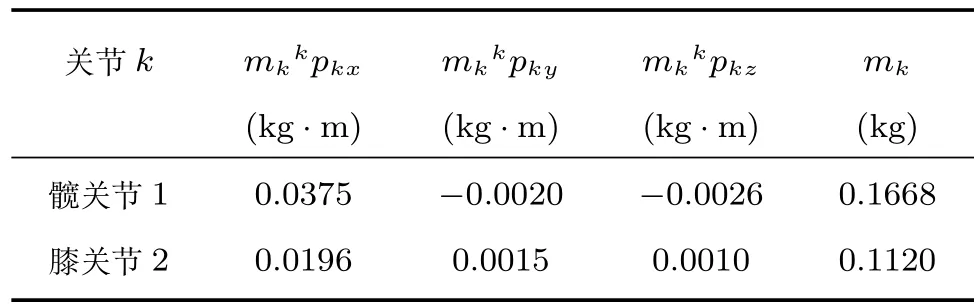
表1 參數辨識結果Table 1 Result of parameter identification
根據表1中得到的髖關節1和膝關節2連桿的參數值,可以由式(9)計算各關節重力項.圖11表示了機器人大腿和小腿轉動角速度在8rad/s低勻速情況下的髖關節1和膝關節2的扭矩實測值與計算值的比較.從圖11中可以看出,進行參數識別后的關節重力矩計算值和實測值基本上是一致的.這說明,采用基于最小二乘法的不解體參數辨識方法來獲得機器人各關節較準確的mkkpk參數值是可行的.
2.3 實驗結果與分析
圖12展示了康復機器人主動訓練中當遺忘因子λ=0.2且同步閾值μ均為1.0時的人–機髖關節1處于擺動步態期的交互情況.在此參數情況下機器人關節的位移輸出和人–機相互作用扭矩分別如子圖12(a)、12(b)所示.機器人關節位移輸出與人–機相互作用力矩的相位回歸圖??n+1=f(??n)如子圖12(c)所示,從該子圖可以看出,機器人關節位移與人–機相互作用力矩的相位基本上一致,即相位差大約在0rad附近,這時機器人與人的運動取得了同步,機器人與人交互積極.(相位回歸圖涵義:??n+1或??n分別表示兩個輸出之間在第n+1或第n個振動時的相位差,n=1,2,···;當 ??n+1= ??n時,表示兩個輸出的相位差保持一定值不變,說明頻率一致;反之,則頻率不一致).
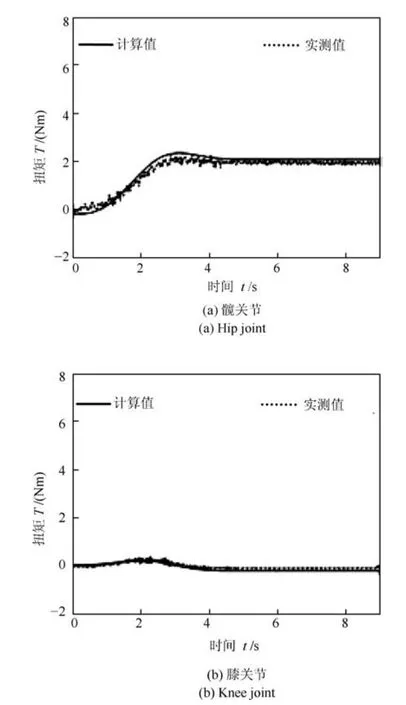
圖11 重力矩計算值和實測值Fig.11 Measured and calculated values for gravity torque
圖13展示了當遺忘因子λ=0.8且同步閾值μ均為1.0時的人–機髖關節1處于擺動步態期的交互情況.在此參數情況下機器人關節的位移輸出和人–機相互作用力矩分別如子圖13(a)和13(b)所示;機器人關節位移輸出與人–機相互作用力矩的相位回歸圖??n+1=f(??n)如子圖13(c)所示,從該子圖可以看出,這時機器人與人的運動亦取得了同步,但機器人關節位移相對于人–機相互作用力矩的相位來說存在一定的相位差,大約滯后1.56rad.這說明人的運動較機器人運動超前,處于被拖動的狀態,康復機器人與人交互較消極.
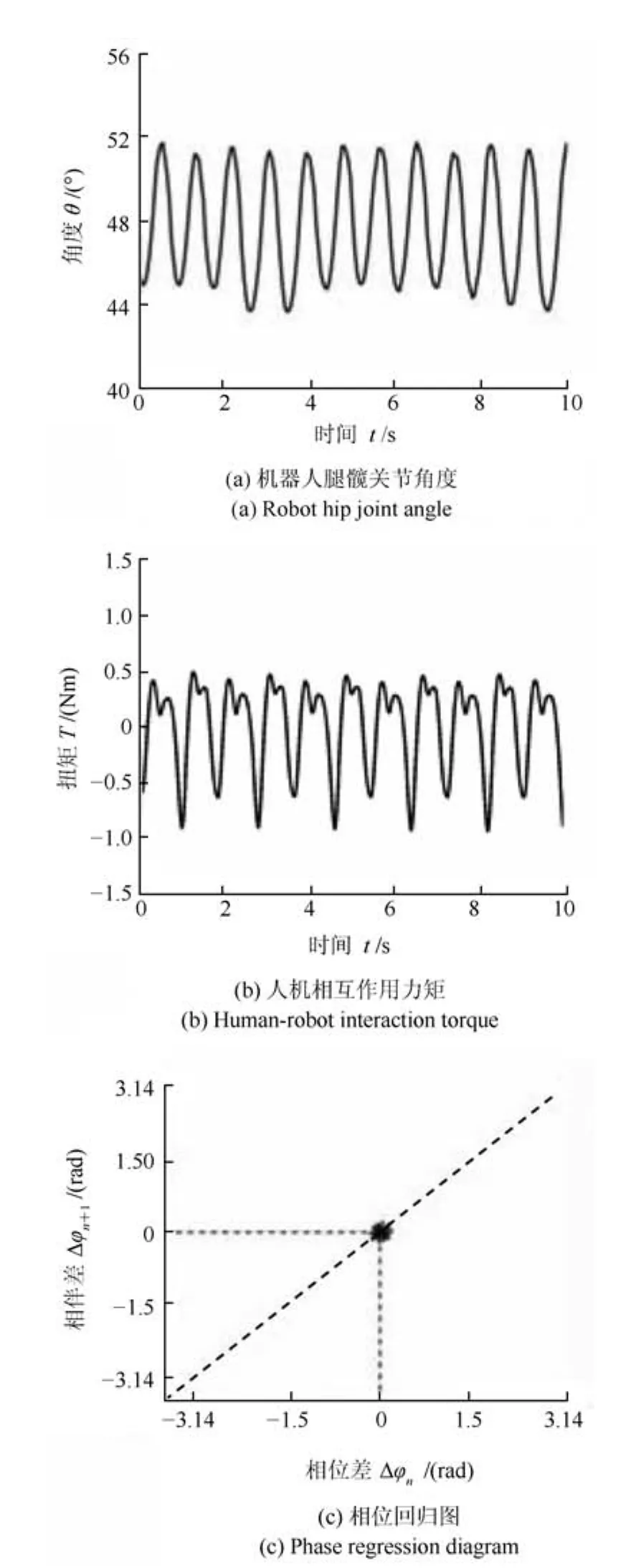
圖12 λ=0.2時人機交互結果Fig.12 Result of interaction withλ=0.2
另外,從圖14可以看到,當λ值取0.1、0.2、0.3、0.5和0.8時,機器人腿髖關節1的驅動扭矩平均值分別為0.59Nm、1.23Nm、1.52Nm、2.48Nm和3.89Nm.從這些實驗數據可知,機器人腿髖關節1的驅動扭矩隨著λ值的增大而增大,亦即康復機器人主動訓練過程中提供給人的訓練輔助力在逐漸增大.
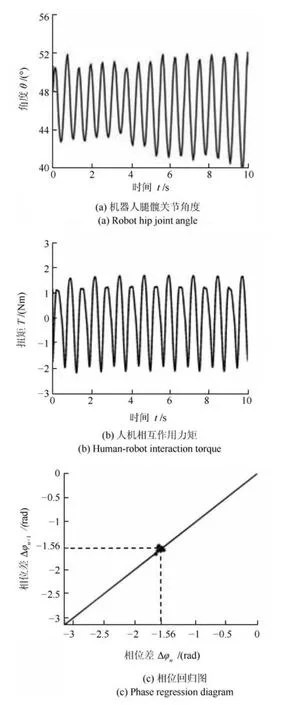
圖13 λ=0.8時人機交互結果Fig.13 Result of interaction withλ=0.8
以上分析表明,當λ取值較小時,康復機器人與人運動在頻率、相位上皆取得同步,關節輔助扭矩較小,柔順交互性積極,人感覺較輕松,而當λ取值較大時,機器人僅在頻率上與人運動取得同步,而相位滯后人的運動,關節關節輔助力矩較大,人有被拖動感覺,柔順交互較消極.
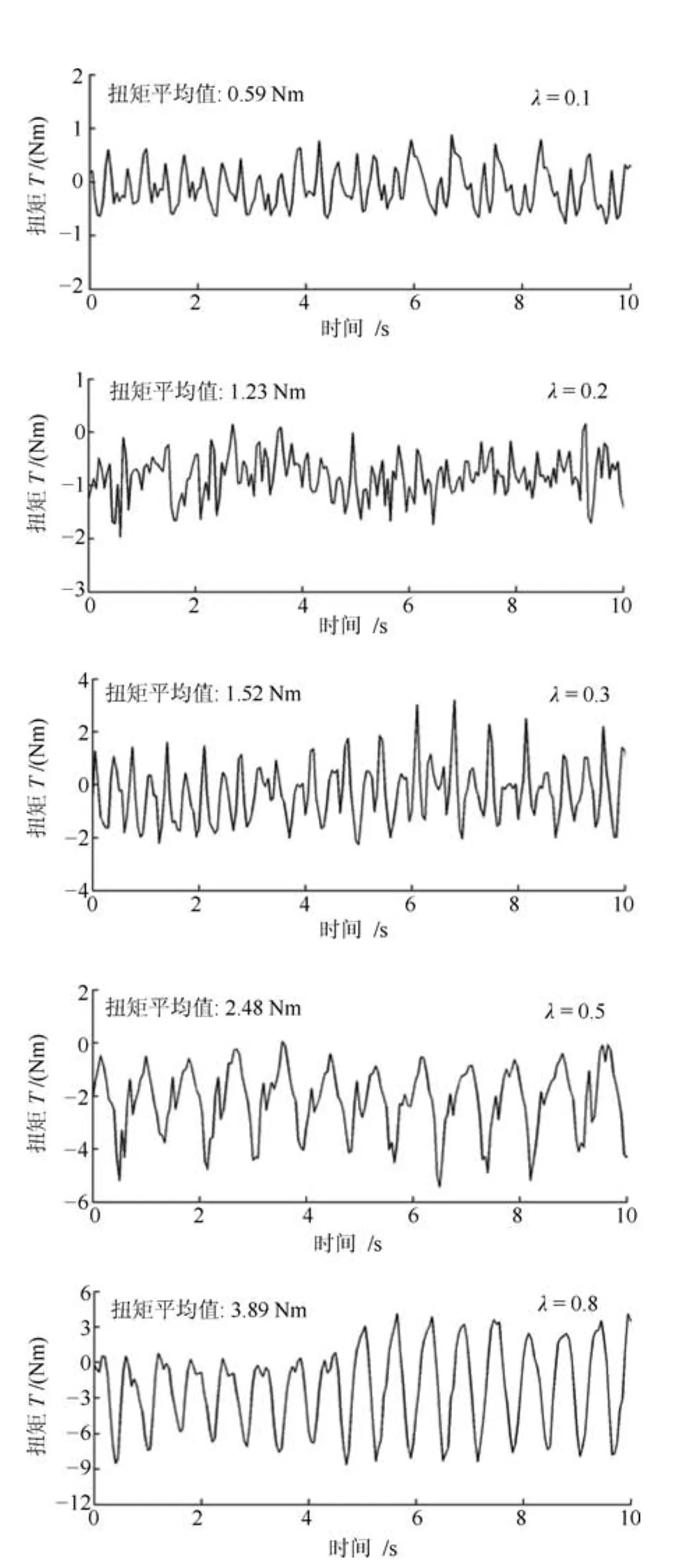
圖14 λ變化時輔助扭矩結果Fig.14 Result of auxiliary torque with modifiedλvalue
3 結論
提出了一種矢量場逐次逼近的康復機器人柔順交互控制方法,其矢量場逐次逼近系統具備自振動特性和輸入輸出同步特性,能通過識別力信號來獲得患者的運動意圖.同時,利用自行設計的新型下肢康復機器人作為實驗研究平臺,對該控制方法的有效性進了驗證.實結果表明,在康復機器人主動訓練過程中,所提出的控制方法能使機器人和人之間的運動在頻率和相位上取得同步,并可通過調節矢量場逐次逼近系統的遺忘因子λ值的大小來調節機器人關節的輔助扭矩,改善訓練的柔順性.
另外,利用FFT頻譜分析對機器人關節扭矩的組成成分進行了分析,并通過基于最小二乘法的參數辨識方法有效地實施了重力補償,為康復機器人柔順實時控制的實現開辟了另一有效途徑.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
特別健康(2018年2期)2018-06-29 06:13:44
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14