用于角位移補(bǔ)償?shù)男滦蚗Yθ微動(dòng)定位平臺(tái)
2018-11-01 03:43:08關(guān)均銘郭曉暉
機(jī)械工程與自動(dòng)化 2018年5期
關(guān)鍵詞:模態(tài)
邱 遷,關(guān)均銘,郭曉暉,湯 暉
(廣東工業(yè)大學(xué) 機(jī)電工程學(xué)院,廣東 廣州 510006)
0 引言
目前精密制造及裝配等操作精細(xì)程度越來(lái)越高,要滿足高精度、多自由度的定位要求就需要研制出新型的精密運(yùn)動(dòng)平臺(tái)[1-2]。晶圓級(jí)芯片封裝是一種經(jīng)過(guò)提高和改進(jìn)的芯片尺寸封裝,為保證芯片封裝的正確性,必須做好高精度定位檢測(cè)工作,高效準(zhǔn)確的檢測(cè)設(shè)備是晶圓級(jí)封裝高質(zhì)量的必要保證[3-4],其中晶粒中心與元件拾取中心是否保持一致決定了倒裝的成敗。
本文結(jié)合柔性納米定位機(jī)構(gòu)及平面三自由度的定位需求創(chuàng)新性地設(shè)計(jì)了一種帶角位移誤差補(bǔ)償?shù)奈⒍ㄎ黄脚_(tái),有效地提高了傳統(tǒng)晶圓檢測(cè)平臺(tái)系統(tǒng)的性能。
1 3-RRR微動(dòng)平臺(tái)結(jié)構(gòu)設(shè)計(jì)
1.1 柔性鉸鏈
柔順機(jī)構(gòu)能夠傳遞或轉(zhuǎn)換運(yùn)動(dòng)、力或能量,它不僅由運(yùn)動(dòng)副傳遞運(yùn)動(dòng),還至少?gòu)钠淙嵝圆考淖冃沃蝎@得一部分運(yùn)動(dòng)。一級(jí)杠桿放大機(jī)構(gòu)的放大原理和結(jié)構(gòu)比較簡(jiǎn)單,使用的柔性鉸鏈比較少,因而具有較高的傳遞效率,目前應(yīng)用比較廣泛。實(shí)際中,理想狀態(tài)的剛性結(jié)構(gòu)其實(shí)會(huì)發(fā)生輕微彎曲,如圖1所示。

圖1 杠桿位移放大器的受力分析圖
在柔性鉸鏈機(jī)構(gòu)產(chǎn)生運(yùn)動(dòng)時(shí),各柔性鉸鏈不僅發(fā)生了轉(zhuǎn)角變形,同時(shí)也會(huì)有拉伸和壓縮變形產(chǎn)生,從而使柔性鉸鏈的回轉(zhuǎn)中心產(chǎn)生偏移,影響機(jī)構(gòu)的放大率。設(shè)作用在柔性鉸鏈上的軸向力為F2,反向作用力為F1,力矩為M,柔性鉸鏈的轉(zhuǎn)角為θ,柔性鉸鏈的軸向變形為Δy,輸入力到作用在柔性鉸鏈上的點(diǎn)的距離為l1,柔性鉸鏈總長(zhǎng)為l,Xin為輸入端位移,Xout為輸出端位移。
根據(jù)受力平衡關(guān)系有:
F1+F2=0.
(1)
M-F1l1=0.
(2)
柔性鉸鏈的變形量和受力關(guān)系為:
M=KM×θ.
(3)
F2=KF×Δy.
(4)

由變形幾何關(guān)系,得:
Xout=l×θ-Xin.
(5)
故放大倍率A:
(6)
1.2 3-RRR 微動(dòng)平臺(tái)補(bǔ)償器
基于以上杠桿位移放大器結(jié)構(gòu)的理論分析,本文創(chuàng)新性地設(shè)計(jì)了一個(gè)三方向?qū)ΨQ式一級(jí)杠桿放大機(jī)構(gòu)組成的3-RRR微納運(yùn)動(dòng)平臺(tái)。將杠桿位移放大器巧妙地設(shè)計(jì)成L型,不僅增大了放大倍數(shù),還節(jié)省了空間,使得整個(gè)微納補(bǔ)償裝置結(jié)構(gòu)簡(jiǎn)單緊湊,其平面結(jié)構(gòu)如圖2所示。
2 有限元分析
使用ANSYS軟件,通過(guò)模態(tài)分析驗(yàn)證其動(dòng)態(tài)性能,選用 Al7075-T6 作為微納位移補(bǔ)償裝置的材料。圖3為仿真得到的該3-RRR機(jī)構(gòu)的前6階模態(tài),其中顏色越深代表輸出位移越大,反之越小。第1階模態(tài)頻率為261 Hz表明了該機(jī)構(gòu)具有較大的固有頻率,證實(shí)了該微納定位平臺(tái)擁有較高的帶寬及精密定位性能。
3 實(shí)驗(yàn)系統(tǒng)搭建與測(cè)試
本實(shí)驗(yàn)中的3-RRR微納位移補(bǔ)償裝置是由一整塊型號(hào)為Al7075-T651的航空鋁通過(guò)電火花線切割方式加工而成,如圖4所示。驅(qū)動(dòng)器使用推疊式壓電陶瓷(型號(hào)為P887.91;行程為32 μm±10%,最大值為38 μm±10%;阻滯力為1 850 N)驅(qū)動(dòng)3-RRR微納位移補(bǔ)償裝置,選用控制卡(型號(hào)為GTS-800-PV-PCI-G,8通道)來(lái)控制運(yùn)動(dòng),使用光纖位移傳感器檢測(cè)位置誤差。做微動(dòng)部分測(cè)試時(shí),為了減少外界振動(dòng)干擾,將3-RRR微納位移補(bǔ)償裝置等關(guān)鍵設(shè)備放置于高性能阻尼隔振平臺(tái)上。

圖2 3-RRR微動(dòng)平臺(tái)平面圖
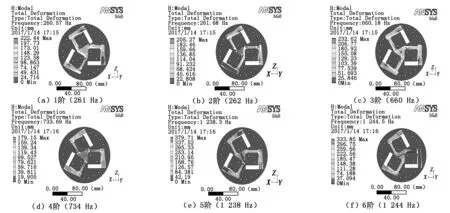
圖3 3-RRR機(jī)構(gòu)的前6階模態(tài)
通過(guò)ANSYS仿真可知,柔性3-RRR機(jī)構(gòu)并不能實(shí)現(xiàn)XY方向的平動(dòng),為了能夠達(dá)到機(jī)構(gòu)平動(dòng)的目的,我們?cè)谶@里設(shè)置θ′為θ軸的標(biāo)定零點(diǎn),即在機(jī)構(gòu)運(yùn)動(dòng)初始就設(shè)置(θ=θ′,X=0,Y=0)為運(yùn)動(dòng)相對(duì)零點(diǎn),并做了以下開(kāi)環(huán)的運(yùn)動(dòng)控制實(shí)驗(yàn)。
(1)X單自由度運(yùn)動(dòng)模式,即X軸參考信號(hào)為幅值為20 μm的Sine波,Y軸與θ軸參考信號(hào)保持為零。X軸的軌跡追蹤誤差控制在0.5 μm(誤差率小于0.8%)以下,如圖5所示。
(2) 同理,Y單自由度運(yùn)動(dòng)軌跡如圖6所示,Y軸的軌跡追蹤誤差控制在0.7 μm(誤差率小于1.1%)以下。
(3)θ單自由度運(yùn)動(dòng)模式如圖7所示,θ軸的軌跡追蹤誤差控制在0.003°(誤差率小于0.15%)以下。
通過(guò)以上實(shí)驗(yàn)結(jié)果可以看出:①前期建立的運(yùn)動(dòng)學(xué)模型精準(zhǔn),機(jī)構(gòu)的性能滿足設(shè)計(jì)要求;②3-RRR并聯(lián)機(jī)構(gòu)的多軸位移耦合特性對(duì)運(yùn)動(dòng)定位精度有一定的影響。

圖4 3-RRR微動(dòng)平臺(tái)實(shí)物圖

圖5X單自由度運(yùn)動(dòng)軌跡圖6Y單自由度運(yùn)動(dòng)軌跡圖7θ單自由度運(yùn)動(dòng)軌跡
4 總結(jié)
基于柔性鉸鏈設(shè)計(jì)了一種新型帶角位移的平面三自由度納米位移補(bǔ)償器,它具有體積小、重量輕、利于集成、減小運(yùn)動(dòng)負(fù)載慣量等優(yōu)點(diǎn)。通過(guò)簡(jiǎn)單開(kāi)環(huán)測(cè)試,其工作行程放大約2倍,定位精度為亞納米級(jí);通過(guò)使用ANSYS軟件模態(tài)分析,得到的共振頻率高達(dá)261 Hz,具有良好的動(dòng)態(tài)特性。
猜你喜歡
成都信息工程大學(xué)學(xué)報(bào)(2022年4期)2022-11-18 07:31:14
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:12
工程與建設(shè)(2019年1期)2019-09-03 01:12:12
廣州大學(xué)學(xué)報(bào)(自然科學(xué)版)(2016年2期)2017-01-15 13:43:00
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39
振動(dòng)工程學(xué)報(bào)(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36