基于二流理論的自動化集裝箱碼頭集疏運路網布置評價方法研究
2018-11-01 03:29:06管政霖梁孝誠辛永寶
武漢理工大學學報(交通科學與工程版) 2018年5期
關鍵詞:工藝
管政霖 周 強 梁孝誠 辛永寶
(武漢理工大學物流工程學院 武漢 430063)
0 引 言
全自動集裝箱碼頭堆場箱區一般采取垂直岸線布置,堆場與碼頭前沿裝卸船車輛及后方集疏運車輛之間的交接作業在箱區兩端進行,集裝箱垂直岸線擺放在堆場箱位上[1].這種堆場布置方式使得碼頭所有的集疏運車輛都在堆場陸側后方的一條行車道上行駛,裝卸箱的作業區或裝卸道緊靠行車道,集疏運卡車在臨近目標箱區時要減速停車去完成裝卸集裝箱的任務,車輛之間相互影響、相互干擾,其道路的通行質量對集裝箱碼頭的作業效率有著重要的影響,一直是港口規劃設計者和運營管理者最關心的工程技術問題之一.韓保爽等[2]參考國外進港閘口布置形式,提出多級閘口布置新模式對進港外集卡進行分流,緩解集疏運交通壓力;劉廣紅等[3-4]則借鑒城市單向交通理念,對集疏運交通組織進行設計,使港內形成交通循環,優化交通條件.但目前對自動化集裝箱碼頭集疏運路網的研究仍較少且都是從交通組織的角度,針對路網本身性能的分析仍處于空白.
基于交通工程的二流理論,文中分析了全自動集裝箱碼頭路網形態對集疏運交通服務質量的影響,建立了基于二流理論的碼頭陸域集疏運交通流模型,提出了一種箱區垂直布置的自動化集裝箱碼頭集疏運路網布置評價方法,通過系統仿真初步獲得了相關參數.
1 自動化集裝箱碼頭陸域集疏運交接的兩種工藝
1.1 集疏運卡車倒車式交接工藝
圖1為倒車式交接工藝及平面布置,堆場末端布置有倒車裝卸區,集卡倒車后,集裝箱自然形成為堆場集裝箱擺放方向[5].
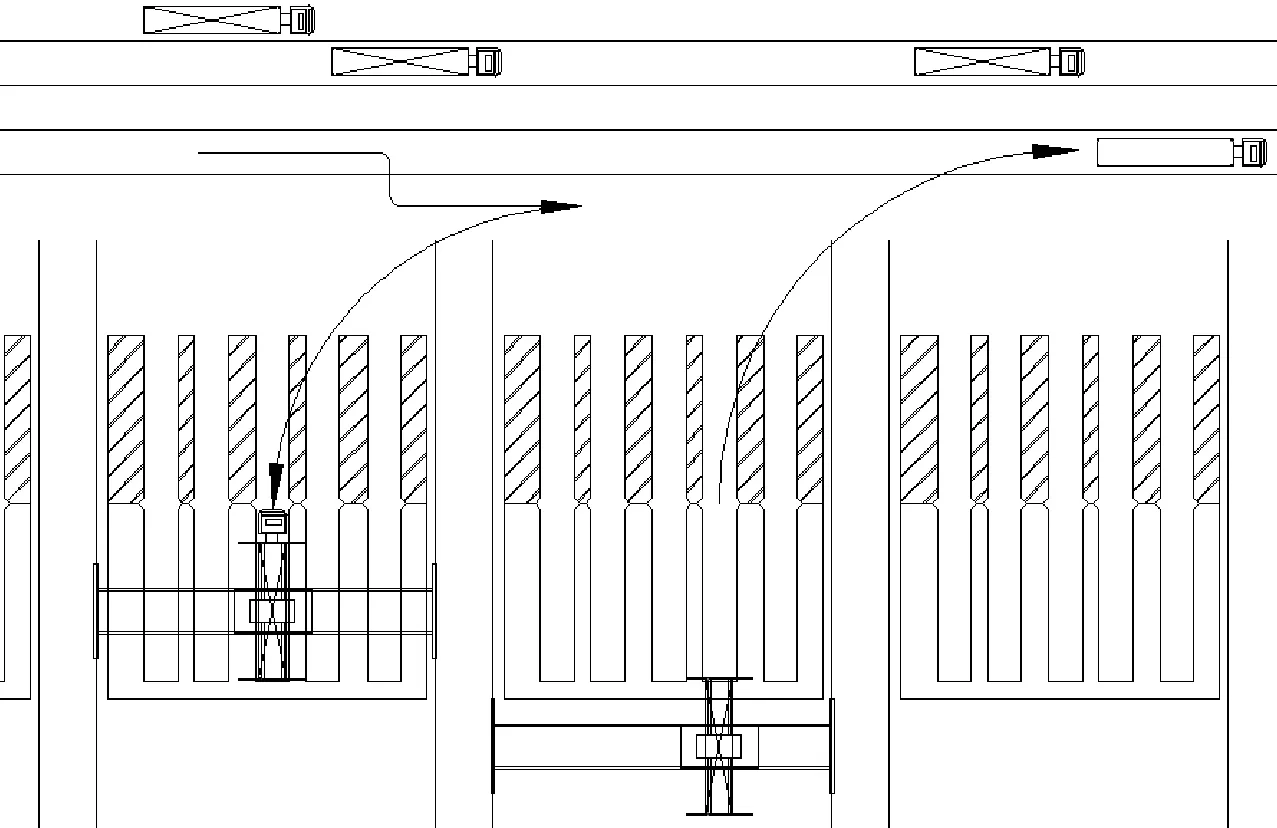
圖1 倒車式交接工藝與平面布置
工藝過程為:集疏運卡車行駛到目標箱區,然后倒車進入裝卸交接區,交接裝卸完成后,卡車駛入行車道離開.由于該工藝需要增設倒車區,故占用碼頭面積較大.當然,車的駛入駛出行車道也會影響行車道車流.優點是單獨設立的倒車裝卸區減小了車輛裝卸對行車道的影響,且裝卸設備不需再把集裝箱旋轉90°.
1.2 集疏運卡車順靠式交接工藝
圖2為順靠式交接工藝及平面布置,交接裝卸道緊靠行車道.工藝過程為:集疏運卡車行駛到目標箱區交接裝卸道,交接裝卸完成后,卡車駛入行車道離開.由于集裝箱的位置方向與堆場箱區方向不一致,交接起重機需要將集裝箱旋轉90°才能進入堆場.顯然,由于交接裝卸道緊靠行車道,卡車的駛入駛出行車道需要減速、加速、變道和修正車頭方向,影響行車道車流.如果堆場垂直箱區寬度過窄,還會影響相鄰箱區的集疏運卡車進入裝卸道.
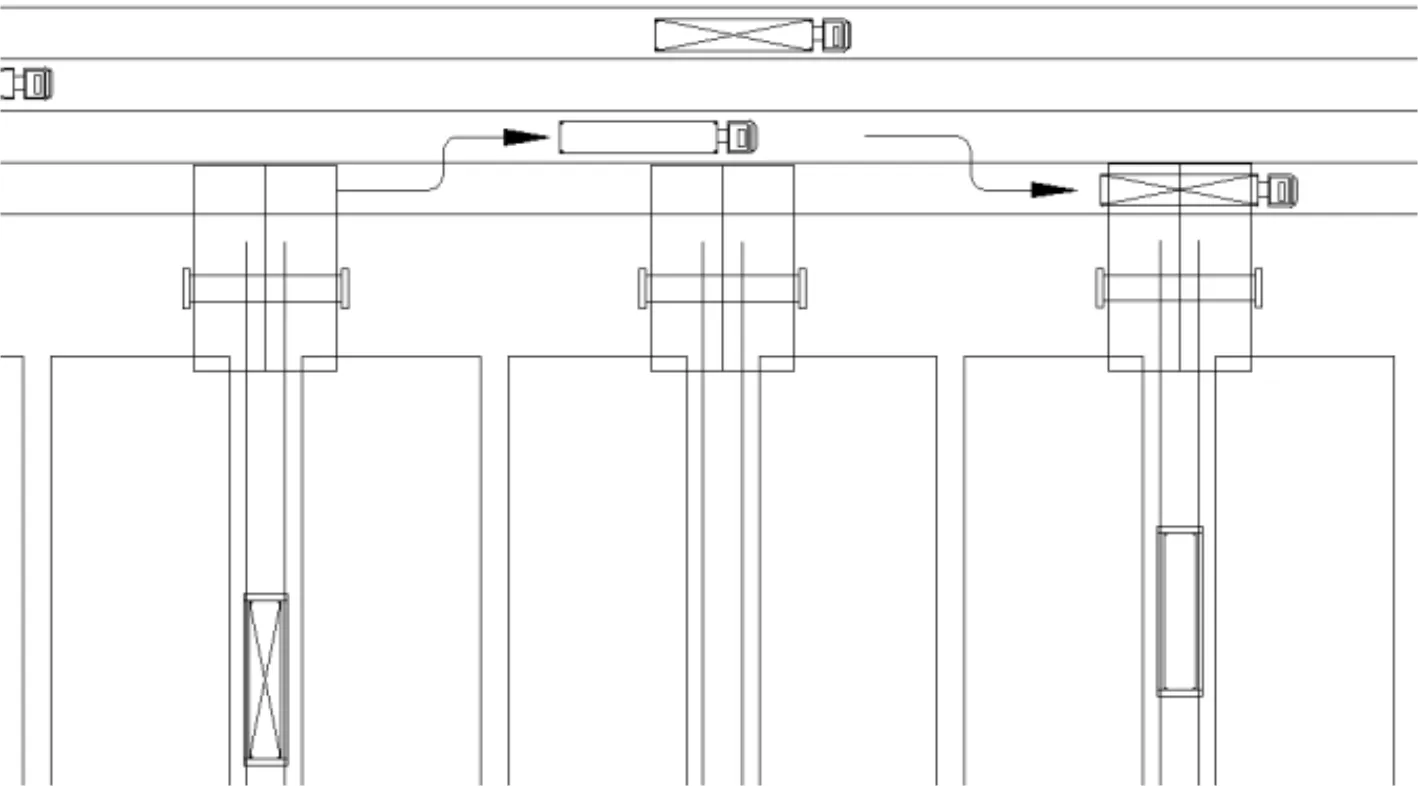
圖2 順靠式交接工藝與平面布置
以上兩種交接工藝都會影響集疏運道路通行質量,影響程度需要進行深入分析,才能確定最佳的行車道數量,設計合理的平面布置.
2 自動化集裝箱碼頭陸域集疏運路網交通服務質量評價方法
2.1 基于二流理論的碼頭集疏運交通流模型
二流理論將交通流中的車輛分為運行和停止兩類,后者包括臨時裝卸貨、臨時上下客、紅綠燈、交通擁堵等.對于自動化集裝箱碼頭陸域集疏運交通流系統,行車道上的集疏運車流中既有處于行駛狀態的車輛,又有減速停車等待裝卸的車輛.
基于二流理論,針對自動化集裝箱碼頭陸域集疏運作業交通流特點,做出以下假設:集疏運卡車平均行駛速度vr與路網中處于行駛狀態的車輛所占比重fr成比例.
由假設可得:
(1)
式中:Vm為路網中集疏運車輛平均最大運行速度(集疏運時,Vm一般為0.50~0.58 km/min);n為集疏運交通服務質量參數.
平均速度V可以定義為Vrfr,于是
(2)
式(2)的邊界條件為當fr=1 時,V=Vm;當fr=0時,V=0.
設Tr為每單位距離的外集卡道路行駛時間.
(3)
則外集卡碼頭內的滯留時間T為
T=Tr+Ts
(4)
將式(3)代入式(4),得
(5)
外集卡在碼頭內的滯留時間決定碼頭集疏運效率.通過以上推算,影響自動化集裝箱碼頭集疏運效率的因素主要有集疏運路網性能和外卡等待裝卸的停止時間.對于自動化集裝箱碼頭集疏運系統,行車道上車輛平均最大運行速度Vm為定值,故路網性能可以通過集疏運路網交通服務質量參數n來評價,n值越小,隨著fr的減小,Tr的增長越緩慢,即交通流量的增大對路網環境的影響越小.n值決定集裝箱碼頭路網對集疏運高峰期作業的承受能力.而外集卡等待裝卸的停止時間Ts則取決于堆場裝卸設備的工作效率和碼頭生產組織策略.
2.2 集疏運路網交通服務質量評價方法
為探究碼頭集疏運路網形態與集疏運路網交通服務質量參數之間的關系,建立集疏運交通質量評價公式,擬參考城市交通兩相流理論中關系模型,根據場橋與集疏運卡車的交接工藝、堆場箱區平面布置尺寸、場橋裝卸效率和行車道數量等碼頭集疏運路網形態參數,建立如下模型.
n=k0+k1X1+k2X2+k3X3
(6)
式中:k0取決于自動化集裝箱碼頭堆場陸側交接工藝;X1為箱區寬度,m;X2為場橋工作循環時間,min;X3為行車道數量,條;k1,k2,k3值為回歸系數.
由于實際情況下,碼頭集疏運交通流相關參數的獲取比較復雜,本文擬采用仿真建模的方法采集數據分析計算,驗證評價方法.
3 自動化集裝箱碼頭陸域集疏運系統仿真模型
3.1 集疏運裝卸工藝的概念模型
Petri網能夠對具有并發性、異步新、分布式、非確定性系統進行有力描述[6],由于箱區垂直布置的自動化集裝箱碼頭集疏運系統具有以上特點,因此可用Petri網理論描述集疏運系統的作業流程.集箱子系統層的對象模型見圖3.
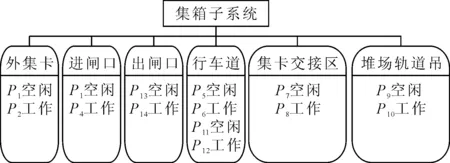
圖3 集箱子系統層對象模型
根據集箱子系統層的對象模型,其動態模型見圖4.
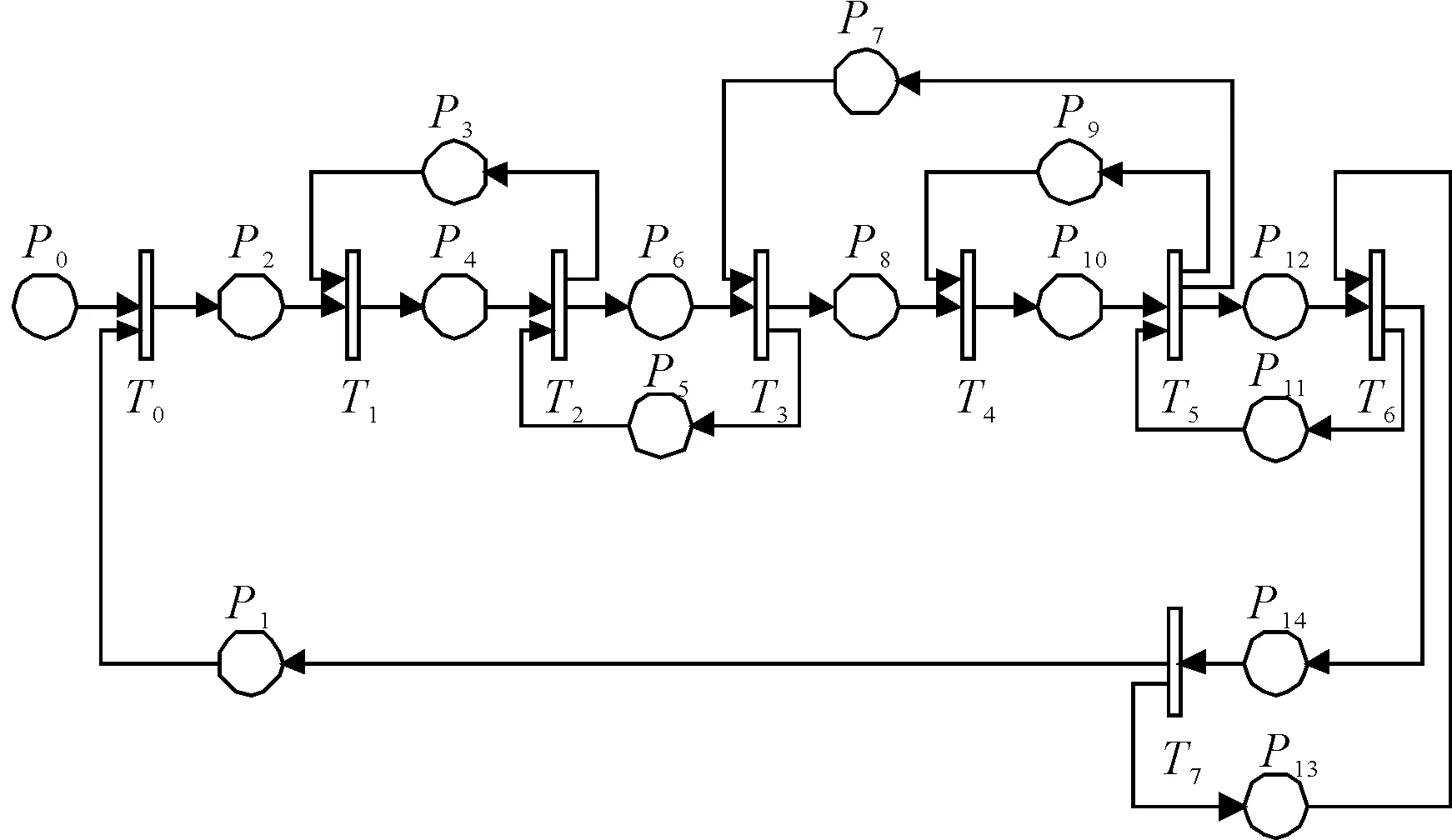
圖4 集箱子系統層動態模型
3.2 集疏運道路交通模型
3.2.1集疏運道路的路段模型
自動化集裝箱碼頭堆場的布置與傳統碼頭有很大的不同,垂直岸線布置的堆場將碼頭前沿裝卸車輛與后方集疏運車流自然分離,使得所有集疏運車輛均在場陸側后方的一條主干道上行駛.特種箱堆場一般布置在自動化堆場后方,其裝卸車道與集疏運主干道形成交叉,將其分為多個路段.為優化集疏運交通條件、簡化港內交通組織,自動化集裝箱碼頭的車道一般為單向車道,使港內形成交通循環[7].自動化集裝箱碼頭集疏運主干道道路路段簡圖見圖5.
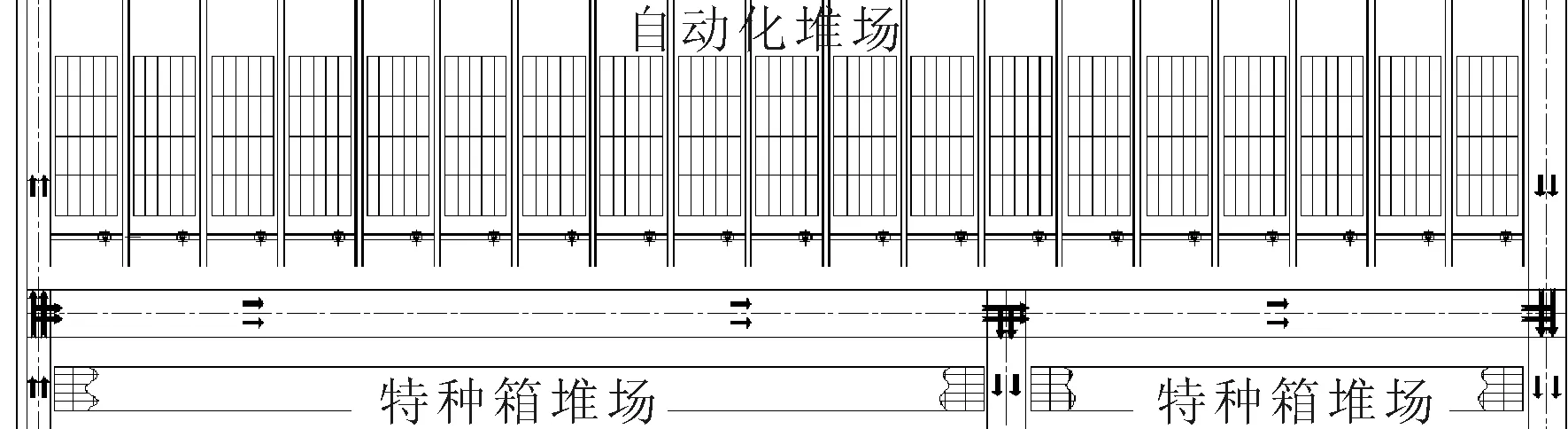
圖5 自動化集裝箱碼頭集疏運主干道道路路段示意圖
3.2.2車輛行駛規則
自動化集裝箱碼頭集疏運時,交通流特點為外集卡行駛速度較低且目標車道明確.外集卡進入集卡交接區進行裝卸作業之前始終維持原車道,直至將要到達目標堆場時開始變換車道;外集卡完成裝卸作業駛出集卡交接區之后即具有換車道需求,直至駛入目標車道.
4 兩種交接工藝及平面布置方式的陸域集疏運仿真試驗
4.1 仿真模型建立
碼頭設計年吞吐量為160萬TEU,垂直岸線布置的堆場總長788 m,由22列寬度均為32 m的箱區組成,每隔兩個箱區均設有一條寬為4 m的消防通道.碼頭進出閘口分離式布置,堆場陸側布置4條右行單向車道.采用倒車式交接工藝時,堆場采用“接力式ARMG”的裝卸工藝,其工作循環時間約為均值為7.26 min的均勻分布;采用順靠式交接工藝時,堆場采用“ARMG+軌道式平板小車+交接起重機”的裝卸工藝,其工作循環時間約為均值為4.64 min的均勻分布,此時路網中與堆場相鄰的一條行車道需作為裝卸道使用.
4.2 仿真試驗設計
以四種影響因素為變量,設計14組仿真試驗,見表1.每組試驗的試驗工況均為高峰期作業,仿真試驗時間長度為7 d,仿真時間單位為min(共計10 080 min).
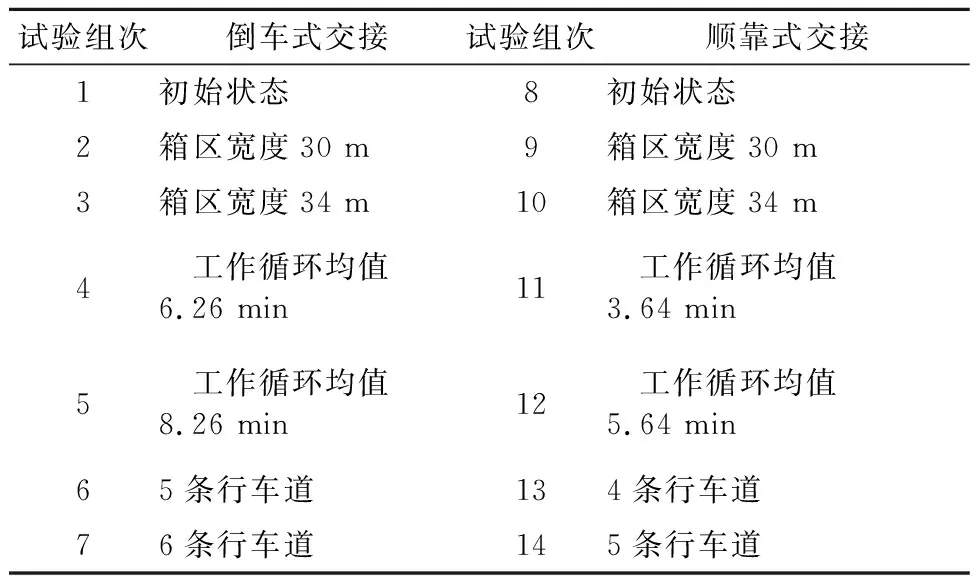
表1 仿真試驗分組
本次仿真試驗,主要統計外集卡的正常行駛時間與處于行駛狀態的外卡車輛所占比重,從而根據式(3)推算出不同試驗組次的行車道交通服務質量參數n,進而得出自動化集裝箱碼頭集疏運交通流質量計算公式,評價集疏運交通流質量.順靠式交接工藝的碼頭,參照行車道上的行駛速度,取0.50 km/min;倒車式交接工藝的碼頭,考慮其倒車操作,取0.38 km/min.
4.3 試驗數據分析
4.3.1倒車式交接工藝集疏運路網交通服務質量評價
倒車式交接工藝的自動化集裝箱碼頭各組試驗所得外集卡的正常行駛時間與堆場工作的裝卸設備所占比重及交通質量參數值,見表2.
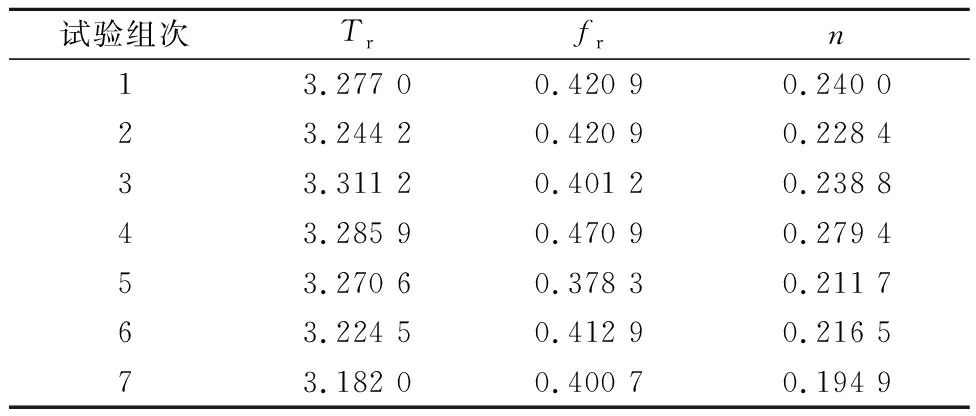
表2 倒車式交接碼頭試驗數據及交通服務質量參數

.492 2+0.002 6X1-
0.033 8X2-0.022 5X3
(7)
對回歸方程進行顯著性檢驗:
.004 37
(8)

(9)
QB=QT-QA=0.004 22
(10)
(11)
因當α=0.05時,F0.025(3,3)=15.44;當α=0.1時,F0.05(3,3)=9.28,f=28.13>F0.025(3,3),故認為式(7)的線性回歸方程是顯著的.
對回歸系數進行顯著性檢驗.
.007 1
(12)
C=(XTX)-1=
(13)
.602 8-0.035X2-0.026 2X3
(14)
由式(14)可知,對于倒車式交接工藝的自動化集裝箱碼頭,場橋的工作循環時間與行車道數量是影響集疏運路網交通服務質量的主要因素,且值始終維持在較低的水準,其原因是倒車區緩解了車輛駛入駛出裝卸區時對行車道車輛的影響.
4.3.2順靠式交接工藝集疏運路網交通服務質量評價
順靠式交接工藝的自動化集裝箱碼頭各組試驗所得外集卡的正常行駛時間與堆場工作的裝卸設備所占比重及交通質量參數值,見表3.
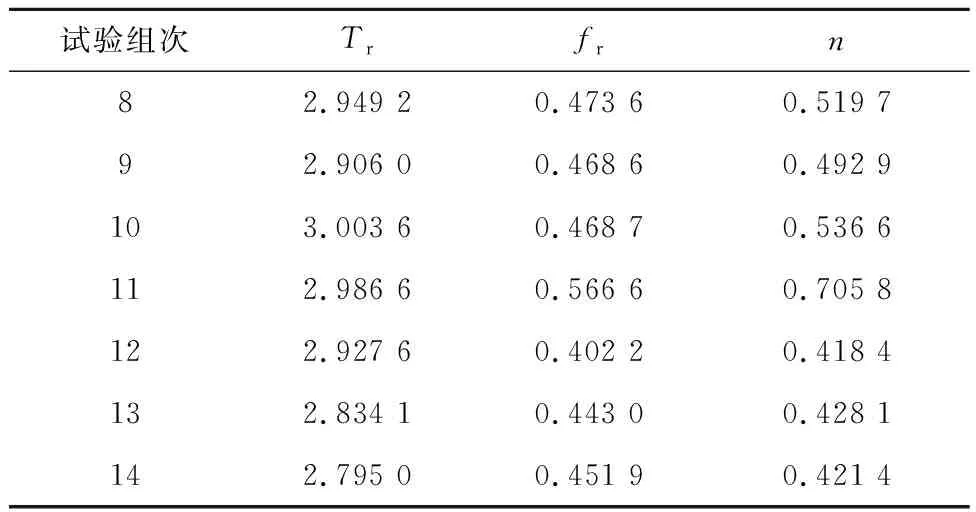
表3 順靠式交接碼頭試驗數據及交通服務質量參數
(15)
同式(8)~(11),對回歸方程進行顯著性檢驗,得F=13.11.因當α=0.05時,F0.025(3,3)=15.44;當α=0.1時,F0.05(3,3)=9.28.在水平α=0.05時,f=39.17
同式(12)~(13),對回歸系數進行顯著性檢驗,得t1=0.805 0;t2=-5.306 1;t3=-3.235 7.查表可得:當α=0.05時,t0.025(3)=3.182 4,α=0.1時,t0.05(3)=2.353 4,系數X1均顯著為零,X2,X3均顯著不為零.
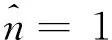
通過以上顯著檢驗,式(15)回歸方程的顯著性為零,而三個回歸系數中有兩個顯著不為零,造成這種現象的原因是樣本的容量不足,故添加試驗組次見表4,仿真試驗所得數據見表5.
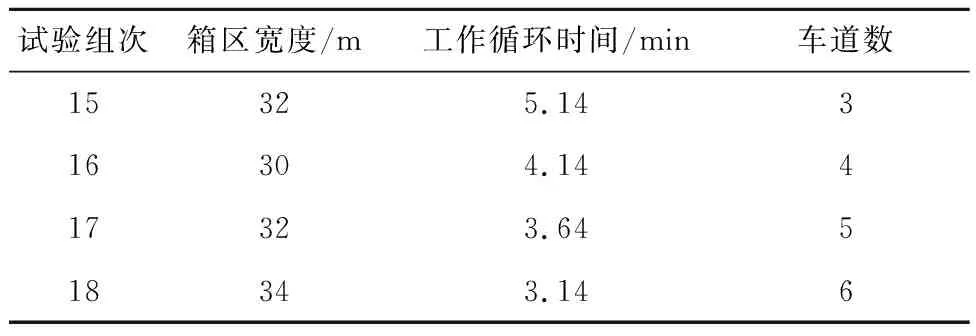
表4 添加試驗組
表5 添加試驗組試驗數據及交通服務質量參數
.506 6+0.028 4X1-
0.165 2X2-0.042 8X3
(16)
同式(8)~(11),對回歸方程進行顯著性檢驗,得F=19.52.因當α=0.05時,F0.025(3,7)=14.62;當α=0.1時,F0.05(3,7)=8.89,f=19.52>F0.025(3,3),故認為式(16)的線性回歸方程是顯著的.
同式(12)~(13),對回歸系數進行顯著性檢驗,得t1=2.455 0;t2=-6.545 0;t3=-2.490 3.查表可得:當α=0.05時,t0.025(7)=2.364 6,α=0.1時,t0.05(7)=1.894 6,三個系數均顯著不為零,各回歸變量作用是顯著地,式(16)檢驗通過.
由式(16)可知,對于順靠式交接工藝的自動化集裝箱碼頭,堆場寬度、場橋工作循環時間、行車道數量均對集疏運路網交通服務質量產生影響,并且場橋工作循環時間對服務質量的影響要遠大于其余兩個因素.其原因為,當場橋的工作循環時間縮短時,堆場裝卸效率提高,進出裝卸車道的車輛之間干擾更為頻繁.
5 結 論
1) 對于采用倒車式交接的自動化集裝箱碼頭,其場橋的工作循環時間與行車道數量是影響集疏運路網交通服務質量的主要因素,且由于倒車裝卸區的緩沖作用使其交通服務質量始終優于采用順靠式交接的碼頭.
2) 由于場橋作業效率的提高使進出裝卸車道的車輛間的干擾更為頻繁,場橋工作循環時間對采用順靠式交接的自動化集裝箱碼頭的交通服務質量的影響要遠大于其余因素.
猜你喜歡
中國特種設備安全(2022年5期)2022-08-26 09:19:32
礦產綜合利用(2020年1期)2020-07-24 08:50:40
山東冶金(2019年6期)2020-01-06 07:45:54
收藏界(2019年2期)2019-10-12 08:26:06
世界農藥(2019年2期)2019-07-13 05:55:12
世界農藥(2019年2期)2019-07-13 05:55:10
模具制造(2019年3期)2019-06-06 02:11:00
山東工業技術(2016年15期)2016-12-01 05:30:59
銅業工程(2015年4期)2015-12-29 02:48:39
新疆鋼鐵(2015年3期)2015-11-08 01:59:52