大型高地隙噴霧機噴桿主動懸架自適應模糊滑模控制
2018-11-06 04:02:42杜岳峰毛恩榮溫浩軍
農業工程學報 2018年21期
關鍵詞:系統
薛 濤,李 偉,杜岳峰,毛恩榮※,溫浩軍
?
大型高地隙噴霧機噴桿主動懸架自適應模糊滑模控制
薛 濤1,李 偉1,杜岳峰1,毛恩榮1※,溫浩軍2
(1. 中國農業大學工學院現代農業裝備優化設計北京市重點實驗室,北京 100083;2. 新疆農墾科學研究院,石河子 832000)
針對噴桿被動懸架在低頻下隔離干擾性車身擺動性能不足的問題,該文在雙連桿梯形噴桿被動懸架的基礎上加裝作動液壓缸而獲得噴桿主動懸架,并提出了基于自適應模糊滑模控制算法的噴桿主動懸架控制方法;在建立了噴桿主動懸架動力學模型和液壓系統模型的基礎上,應用Matlab/Simulink對主動懸架系統進行整體仿真分析,驗證了該文控制方法的有效性;基于課題組開發的大型高地隙噴霧機搭建了實車試驗平臺,分別進行了實車靜態跟隨試驗和田間試驗。試驗結果表明:采用基于自適應模糊滑模控制算法的噴桿主動懸架控制方法,噴桿傾角實車靜態跟隨響應時間和誤差分別為2 s和0.002 rad,相較于PID控制的4 s和0.002 rad響應時間減小;同時,噴桿傾角田間試驗擺動范圍保持在–0.005~0.005 rad內。結論表明,該文提出的噴桿主動懸架控制方法具有良好的響應性、穩定性和準確性,可有效隔離干擾性車身擺動并保持噴桿穩定。該研究有利于提高中國大型高地隙噴霧機噴霧均勻性和噴桿作業穩定性。
農業機械;噴霧;控制;大型高地隙噴霧機;噴桿主動懸架;自適應模糊滑模控制

0 引 言
噴桿作為大型高地隙噴霧機的主要工作部件,其工作性能好壞直接決定農藥的利用率和整機作業穩定性。試驗研究表明,噴桿的不規律運動會引起噴霧沉積均勻性超過或者低于期望值(100%)0%到800%不等[1-4],所以提高噴桿的運動穩定性,對增加噴霧均勻性并提升農藥的使用效率具有重要意義[5-7]。噴桿懸架可以將噴桿與噴霧機車身之間的剛性連接轉換成柔性連接,極大地減少車身傳遞給噴桿的振動,在高端噴桿噴霧機上應用廣泛[8-10]。
大型高地隙噴霧機作業速度快、作業環境惡劣,在作業過程中噴桿需要面對地形起伏變化或者局部地形突變(如凹坑或者凸起)引起的車身高頻或者低頻擺動,從國內外研究學者對噴桿被動懸架的研究成果來看,噴桿被動懸架可以很好的隔離噴霧機工作在崎嶇路況時車身的高頻擺動,但當噴霧機因輪胎遇到地形突變(如凸起或者凹坑)而產生干擾性車身擺動時,噴桿被動懸架的低頻跟隨性能反而會引起噴桿的失衡,導致噴桿離地或者植物冠層的高度改變[11-14]。
本文針對噴桿被動懸架在低頻下隔離干擾性車身擺動性能不足,通過在噴桿雙連桿梯形被動懸架上加裝液壓缸的方式獲得噴桿主動懸架[15-20],這樣噴桿懸架既可以利用外部能源的輸入對噴桿姿態進行主動調整,提高噴桿被動懸架低頻時隔離干擾性車身擺動的性能,還能保留被動懸架的高頻隔離性能,避免主動懸架高頻響應耗費大量的能量。為了保證主動懸架性能達到最佳,針對噴桿主動懸架系統的非線性、不確定性和參數時變性,提出了一套基于自適應模糊滑模的噴桿主動懸架控制算法[21-25],使噴桿主動懸架控制的響應性、穩定性和準確性都得到較大的提升。
1 主動懸架動力學建模與仿真
1.1 主動懸架動力學建模
噴桿主動懸架結構如圖1a所示,外提升架3通過雙連桿2鉸接在與車身一體的內提升架1上組成雙連桿梯形被動懸架,主動懸架液壓缸4鉸鏈在外提升架3和內提升架1之間。當作為被動懸架時,噴桿5帶動外提升架3和內提升架1,使得二者之間產生相對運動,而相對運動可以通過主動懸架液壓缸4伸縮過程中油液流過阻尼小孔產生的阻尼衰減掉;當作為主動懸架時,主動懸架液壓缸4主動伸縮推動外提升架3運動,外提升架3帶動噴桿5跟隨內提升架1運動實現噴桿姿態主動調整。
噴桿主動懸架受力如圖1b所示,噴桿通過雙連桿和連接到車身上,點、、、分別是車身和噴桿上的鉸接點,整個噴桿(兩側噴桿、外提升架)的重心點為。兩側主動懸架液壓缸通過鉸接點、、和連接在車架與噴桿之間。同時,假設噴霧機車身圍繞一條穿過點且平行于車身前進方向的固定軸旋轉,并以點為原點建立坐標系。為更簡單、更方便描述噴桿主動懸架動力學特性,暫不考慮噴桿彈性變形、各個連接桿件的質量、關節處摩擦阻尼和噴霧機底盤懸架的影響。

1. 內提升架 2. 連桿 3. 外提升架 4. 主動懸架液壓缸 5. 噴桿
1. Inner lift frame 2. Connecting rod 3. Outer lift frame 4. Active suspension hydraulic cylinder. 5. Sprayer boom
a. 噴桿主動懸架結構圖
a. Structure diagram of spray boom active suspension
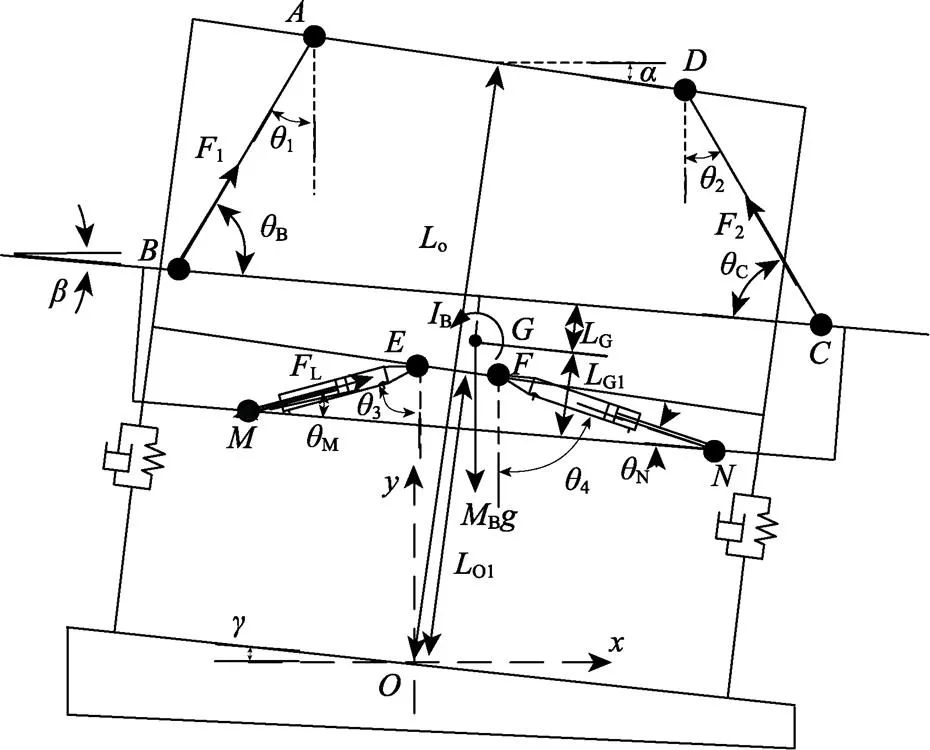
注:為坐標系原點;為地面傾角,rad;為車身傾斜角度,rad;為噴桿與水平面夾角,rad;1、2分別為連桿、與垂直方向夾角,rad;3、4分別為兩側主動懸架液壓缸與垂直方向之間的夾角,rad;L為連桿到地面距離,m;G為連桿到整個噴桿重心的距離,m;O1為連桿到地面距離,m;G1為連桿到噴桿重心的距離,m;B、C為連桿、與噴桿之間的夾角,rad;M、N分別為兩側主動懸架液壓缸與連桿之間的夾角,rad;B為整個噴桿的質量,kg;B為整個噴桿圍繞質心轉動慣量,kg×mm2;L為主動懸架液壓缸負載力,N;1為連桿所受力,N;2為連桿所受力,N。為重力加速度,m/s2;為噴桿重心點;、、、、、、、為連桿鉸接點。
Note:is origin of coordinate system;is the ground angle, rad;is sprayer bodyangle, rad;is the angle between the spray boom and the horizontal plane, rad;1,2are the angle between connecting rod,and the vertical direction respectively, rad;3and4are the angles between 2 sides active suspension hydraulic cylinders and the vertical direction respectively, rad;Lis the distance from the connecting rodto the ground, m;Gis the distance from connecting rodto the center of gravity of whole boom, m;O1is the distance from the connecting rodto the ground, m;G1is the distance from connecting rodto the center of gravity of whole boom, m;B,Care the angles between the connecting rod,and the spray boom respectively, rad;M,Nis the angle between the two sides hydraulic cylinders and the connecting rod, rad;Bis the weight of the whole spray boom, kg;Bis the moment of inertia around the center of mass for the whole spray boom, kg×mm2;Lis the load force of the hydraulic cylinder for the active suspension, N;1is the force of the connecting rod, N;2is the force of the connecting rod, N.is the acceleration of gravity, m×s-2;is the center of gravity of spray boom;,,,,andare connecting rod joints.
b. 噴桿主動懸架受力圖
b. Schematic of force analysis on spray boom active suspension
圖1 噴桿主動懸架結構與受力圖
Fig.1 Structure and force analysis of spray boom active suspension
在四邊形中,噴桿重心橫豎坐標,分別表示為
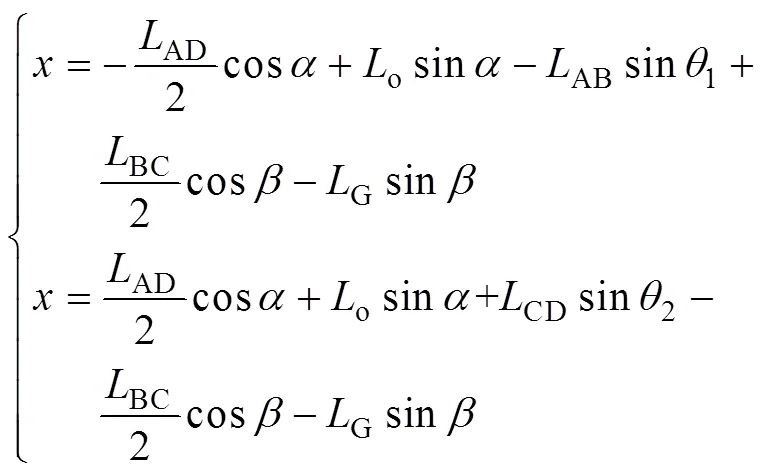

式中AD為懸架連桿長度,m;AB為懸架連桿長度,m;BC為懸架連桿長度,m;CD為懸架連桿長度,m;o為連桿到地面距離,m;為車身傾斜角度,rad;為噴桿與水平面夾角,rad;1、2分別為連桿、與垂直方向夾角,rad。
噴霧機田間作業時,車身傾斜角度和噴桿傾斜角度都較小,近似有
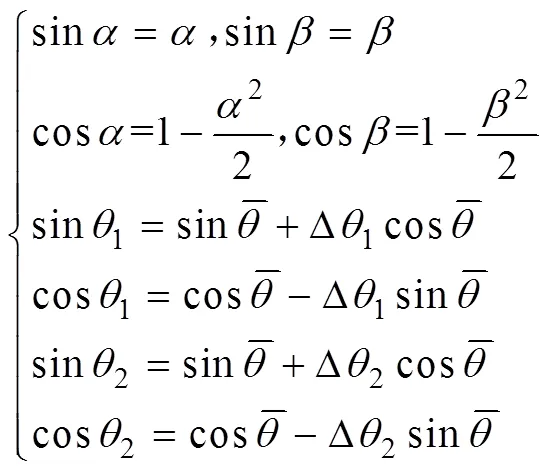

通過式(1)~(3)得
對式(4)和(5)求導并忽略二階小量得
在四邊形中,噴桿重心橫豎坐標,分別表示為

式中3、4分別為兩側主動懸架液壓缸與垂直方向之間的夾角,rad;O1為連桿到地面距離,m;G1為連桿到噴桿重心的距離,m;EF為連桿長度,m;MN為連桿長度,m;BC為懸架連桿長度,m;CD為懸架連桿長度,m;
噴桿擺動角度很小,3、4的值變化范圍較小,近似取


通過式(5)~(8)得:
通過幾何關系可知:

對式(9)和(10)求導并忽略二階小量得:

在噴桿被動懸架和主動懸架工作過程中,噴桿重心坐標變化一致,根據式(5)、(11)~(13)得:
根據平面達朗貝爾原理得

式中M為整個噴桿的質量,kg;I為整個噴桿圍繞質心轉動慣量,kg×mm2;L為主動懸架液壓缸負載力,N;1為連桿所受力,N;2為連桿所受力,N。
1.2 主動懸架動力學特性仿真
依據噴桿被動懸架設計優化結果及其CREO三維模型,分析可得噴桿主動懸架主要參數如表1所示。

表1 噴桿主動懸架參數
采用具有獨立式空氣懸架的噴霧機行駛在水平路面上時,車身側傾角度可近似表示為
式中s位噴霧機左右懸架之間的寬度,m;L、R分別為左右懸架減振行程,m。
根據課題組噴霧機底盤懸架設計參數[26],噴霧機左右懸架之間的寬度為4 m,其減振行程范圍為±100 mm,考慮極限工況時,通過式(16)計算得到此時車身側傾角度達到最大值約為0.05 rad,以此為依據,設計噴桿主動懸架最大擺動角度為0.06 rad左右。
結合上述建立的主動懸架動力學模型,在Matlab/ Simulink中構建噴桿主動懸架動力學仿真模型,為使噴桿傾角能在仿真時間內達到最大值0.06 rad,以斜率0.032 rad/s的液壓缸伸出長度斜坡信號為輸入仿真分析主動懸架的運動學與動力學特性,結果如圖2所示。
從圖2a可知,噴桿傾角隨著主動懸架液壓缸活塞桿伸出長度的增加而線性變化,當主動懸架液壓缸活塞桿伸出長度為0.16 m時,此時噴桿傾角達到設計角度0.06 rad;從圖2b可知,隨著主動懸架液壓缸活塞桿伸出長度的增加,油缸受力增大,最大受力為1.7×104N。根據以上仿真分析結果并結合文獻[27]確定噴桿主動懸架液壓缸主要參數為:缸徑0.063 m,桿徑0.035 m,行程0.32 m[27]。
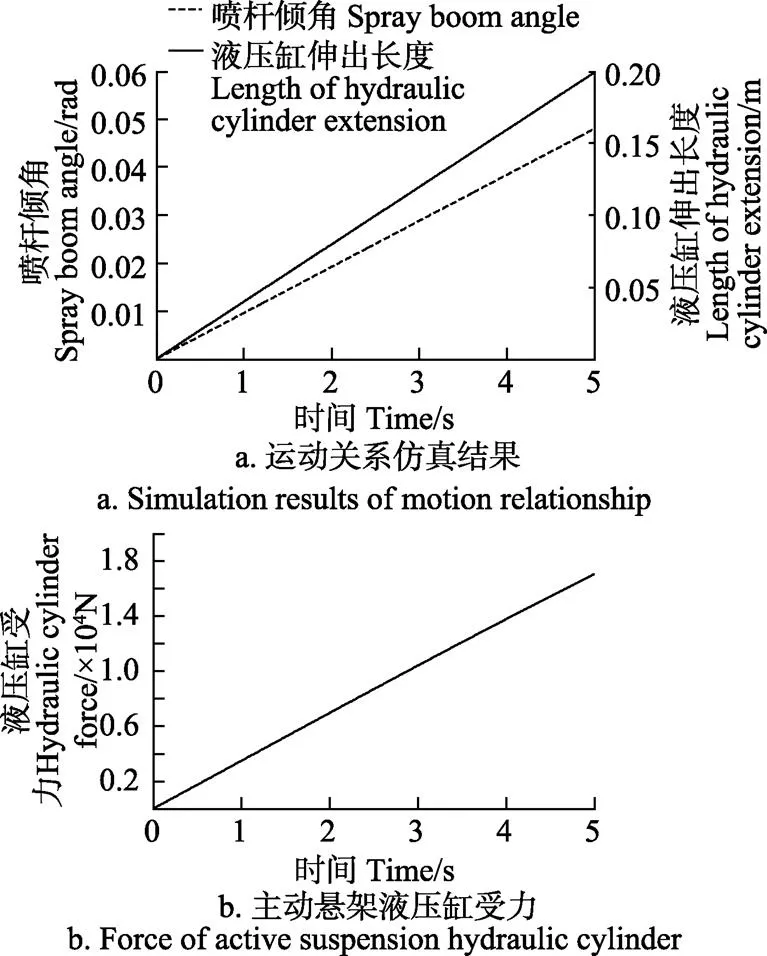
圖2 噴桿主動懸架動力學仿真曲線
2 噴桿主動懸架液壓系統
2.1 液壓系統原理
噴桿主動懸架液壓系統原理如圖3所示,液壓系統參數如表2所示。當阻尼控制閥關閉時,油液無法流動,2個主動懸架液壓缸鎖死,噴桿懸架處于關閉狀態;當2個阻尼控制閥通電打開,主動懸架比例閥處于中位時,2個主動懸架液壓缸活塞桿在噴桿重力作用下伸出或者縮回,油缸內油液流過開度可調的單向節流閥產生不同的阻尼,此時噴桿懸架處于被動懸架狀態;當2個阻尼控制閥通電打開,主動懸架比例閥通電時,高壓油進入主動懸架液壓缸內推動活塞桿伸出和縮回,此時噴桿懸架處于主動懸架狀態。
2.2 噴桿主動懸架比例閥模型
圖4為噴桿主動懸架比例閥節流口通流面積示意圖。
取閥芯右移時閥芯位移為正,則噴桿主動懸架比例閥節流口通流截面積PV為

注:PVS為噴桿主動懸架比例閥進口壓力,Pa;PV1、PV2分別為噴桿主動懸架比例閥閥口④、②壓力,Pa;PV1、PV2為噴桿主動懸架比例閥閥口④、②流量,L·min–1;HC1、HC2分別為左右主動懸架液壓缸無桿腔內流量,L·min–1;HC1、HC2分別為左右主動懸架液壓缸無桿腔內壓力,Pa;T為回油壓力,Pa;s為系統壓力,Pa;FS為系統負載反饋壓力,Pa。
Note:PVSis the inlet pressure of the spray boom active suspension proportional valve, Pa;PV1andPV2are pressure of the spray boom active suspension proportional valve port 4 and 2, Pa;PV1andPV2are flow rate of the spray boom active suspension proportional valve port 4 and 2, L·min–1;HC1andHC2are flow rates of left and right active suspension hydraulic cylinder of rodless cavity respectively, L·min–1;HC1,HC2are rod pressure of left and right active suspension hydraulic cylinder respectively, Pa.Tis return oil pressure, Pa;sis pressure of system, Pa;FSis feedback pressure of system load, Pa.
圖3 噴桿主動懸架液壓系統原理圖
Fig.3 Schematic of hydraulic system for spray boom active suspension

表2 噴桿主動懸架液壓系統參數

注:xPVo為噴桿主動懸架比例閥閥芯單側重疊量,m;dPV為噴桿主動懸架比例閥圓形節流孔直徑,m;xPV為噴桿主動懸架比例閥閥芯位移(右位移為正),m。
式中PVo為噴桿主動懸架比例閥閥芯單側重疊量,m;PV為噴桿主動懸架比例閥圓形節流孔直徑,m;PV為噴桿主動懸架比例閥閥芯位移,(右位移為正),m;PV為噴桿主動懸架比例閥圓形節流孔數目;PVm為噴桿主動懸架比例閥閥芯最大位移量,m。
根據閥芯結構取PVo=5.9×10–4m,PV=3×10–3m,PV=6,PVm=2.24×10–3m[28]。在進行噴桿主動懸架液壓系統建模時,將左右兩側主動懸架液壓缸看作一條無桿腔進油的雙作用液壓缸,忽略阻尼控制閥打開時的壓降,則噴桿主動懸架控制閥流量方程表示為
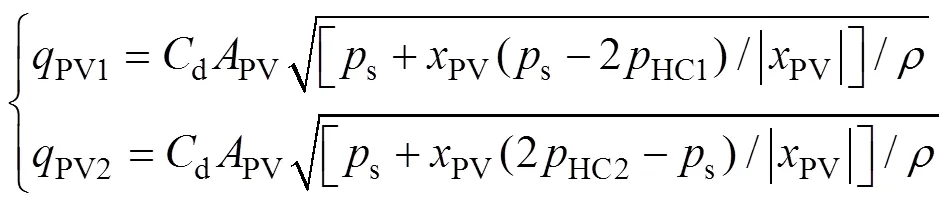
式中d為閥口流量系數;為液壓油密度,kg/m3。
噴桿主動懸架液壓缸流量連續性方程如下
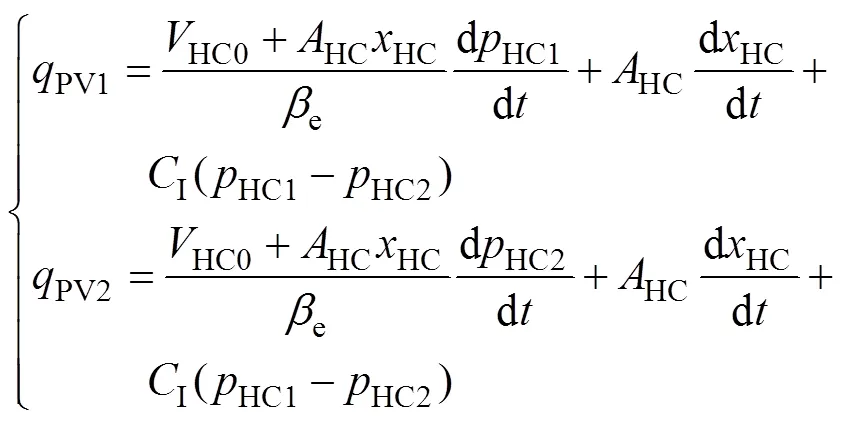
式中HC0為噴桿主動懸架液壓缸有效體積,m3;HC為噴桿主動懸架液壓缸無桿腔有效作用截面積,m2;HC為噴桿主動懸架液壓缸活塞桿的位移(無桿腔增大的方向為正),m;e為液體的體積彈性模量,Pa;I為噴桿主動懸架液壓缸無桿腔外泄漏系數。
忽略彈性負載,則噴桿主動懸架液壓缸活塞力平衡方程為
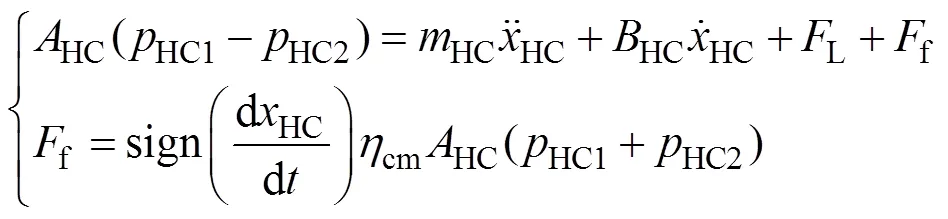
式中HC為噴桿主動懸架液壓缸等效質量,kg;L為作用在噴桿主動懸架液壓缸活塞桿上的外負載力,N;HC為噴桿主動懸架液壓缸的黏性阻尼系數,N×s/m。f為作用在噴桿主動懸架液壓缸活塞運動的總等效摩擦力,N;cm為噴桿主動懸架液壓缸在無回油壓力且僅無桿腔供油驅動時的機械效率,一般為0.9~0.95。
將左右兩側主動懸架液壓缸看作是一條無桿腔進油的雙作用液壓缸時,定義負載壓力L和負載流量L為

由式(18)~(22),負載流量L可表示為
其中s為系統壓力,Pa。
由式(21)~(23)得


式中v、a、u、F為狀態方程系數;為所有不確定因素的總和。e為液體的體積彈性模量,Pa;v為噴桿傾角變化率,rad/s;a噴桿傾角加速度,rad/s2。
3 噴桿主動懸架控制算法
3.1 噴桿主動懸架控制特點分析
當自走式噴霧機進行田間作業時,地形起伏變化引起的車身擺動通過噴桿懸架傳遞給大幅寬噴桿后易引起噴桿的失衡,導致噴桿離地距離產生較大變化,嚴重影響噴霧質量和噴桿的安全。噴桿失衡一個激勵來源于長波段地面起伏引起的車身擺動,此激勵的變化與噴霧機作業車速有關,隨著自走式噴霧機作業車速的提高,此激勵變化速度也隨之增加;一個激勵來源于地形突變(如凸起或者凹坑)引起的干擾性車身擺動,噴桿被動懸架可以隔離此激勵中的高頻部分,但其對于低頻部分的跟隨在此時卻發揮了消極作用,導致噴桿產生干擾性擺動。相較于第一個激勵,第二個激勵來源更廣泛、突發性更強、激烈程度更大。
3.2 噴桿主動懸架控制器設計
根據噴桿主動懸架控制特點分析,其控制目標是在控制信號的作用下,使得系統的輸出噴桿傾角能夠迅速、穩定和準確的跟蹤系統參考輸入d。定義跟蹤誤差e為
滑模變結構控制的滑模面可設置為

式中1和2為滑模系數,1和2>0且滿足Hurwitz條件。
根據滑模變結構控制的原理,滑模控制率由等效控制eq和切換控制es兩部分組成,即
由式(25)和(27)可得


由于噴桿主動懸架系統具有很強的非線性、不確定性和參數時變性,使得系統動態特性非常復雜,其等效控制部分很難通過建立精確的數學模型準確獲得。為了使系統能夠保持良好的控制效果,故采用模糊控制來代替系統的等效控制,通過制定合理的模糊規則來逼近滑模控制等效部分[29],其控制器原理如圖5所示。


圖5 噴桿主動懸架自適應模糊滑模控制原理圖
Fig.5 Self-adaptive fuzzy sliding mode control principle diagram for spray boom active suspension


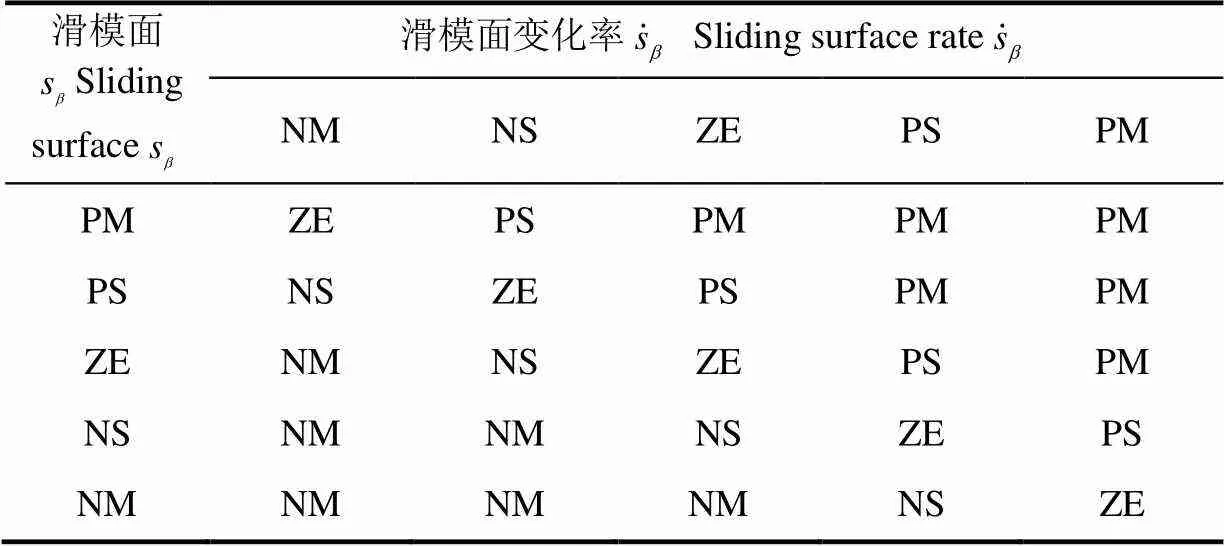
表3 噴桿主動懸架模糊控制器控制規則
而模糊控制器輸入、輸出的隸屬函數設計如式(31)、(32)所示,隸屬函數圖如圖6所示。
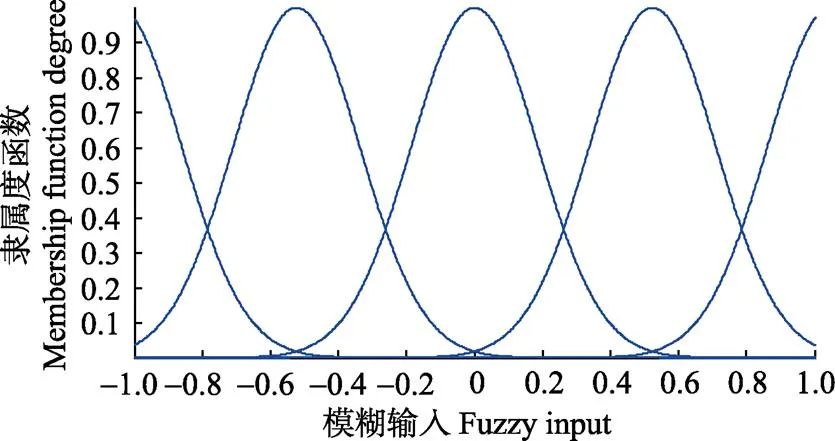
圖6 隸屬函數圖
經過單值模糊化、乘積推理機和平均解模糊的模糊推理過程,最終得模糊控制系統的輸出為

式中為逼近誤差。
滑模變結構控制的切換控制es為
式中為切換值。



式中1為切換控制的自適應參數;2為切換控制的自適應參數。
定義Lyapunov函數為
綜合式(25)、(35)~(41)得

根據式(42),利用Lyapunov穩定性理論,分析該系統是穩定的。
4 噴桿主動懸架控制仿真及分析
為驗證噴桿主動懸架控制算法控制效果,結合已建立的主動懸架系統的動力學模型和液壓系統模型,在Matlab/Simulink中構建噴桿懸架主動懸架系統仿真模型,對比仿真分析本文所設計的自適應模糊滑模控制算法與PID控制算法的信號跟蹤能力,控制算法仿真參數如下表4所示。

表4 控制算法仿真參數
通過主動懸架控制特點分析可知,噴桿主動懸架控制主要針對2種激勵,即變化較緩的地面坡度和突發的地面凸起或者凹坑。以幅值0.05 rad的階躍信號模擬主動懸架控制中的第二種激勵,即噴霧機遇到突發的地面凸起或者凹坑時引起突發的、短時間的車身搖擺;以幅值為0.05 rad,頻率為0.5 rad/s的正弦信號來模擬車身連續擺動工況,仿真分析結果如圖7所示。
從圖7a階躍響應仿真結果可知,PID控制存在著明顯的超調量和系統振蕩,最大超調量為0.005 rad,響應時間較長,為3 s左右,而本文設計的自適應模糊滑模控制器則不存在明顯的超調量和系統振蕩,響應時間進一步減少到1.5 s,調整到位后的誤差幾乎為0;從圖7b中可以看出,PID控制存在著明顯的滯后,且最大跟隨誤差達0.025 rad;自適應模糊滑模控制跟隨性能良好且平穩,跟隨誤差幾乎為0。
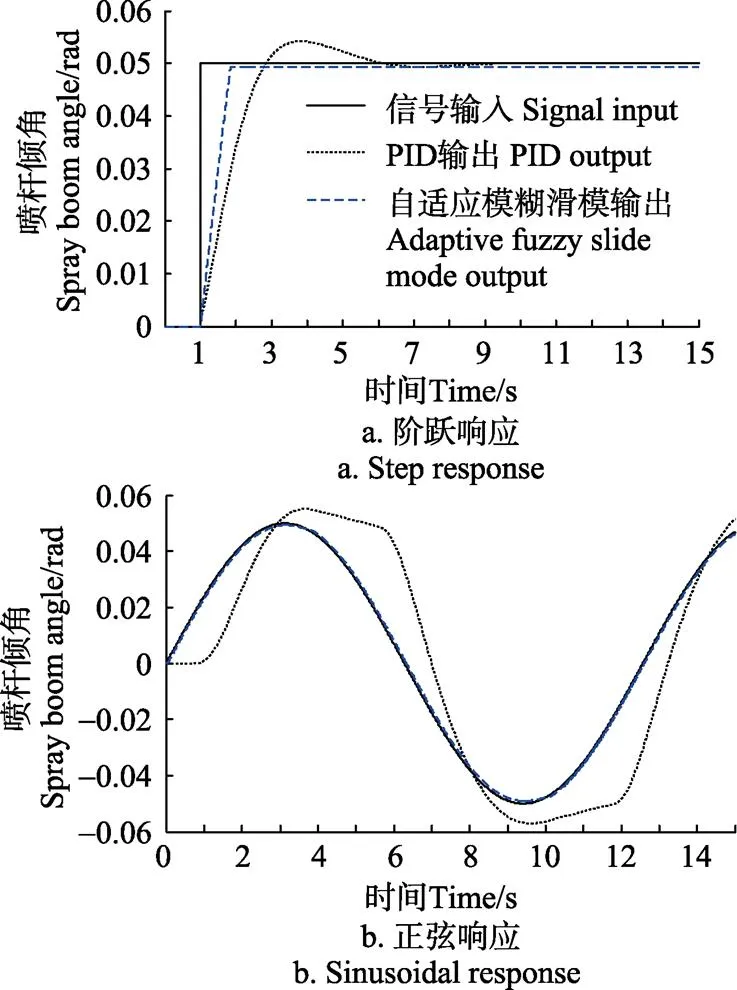
圖7 噴桿主動懸架仿真響應曲線
5 實車試驗
5.1 實車平臺搭建
為了驗證分析所設計的噴桿主動懸架控制系統的性能,以課題組開發的大型高地隙自走式噴霧機為平臺[30],搭建噴桿主動懸架性能實車測試平臺,實車平臺主要由大型高地隙自走式噴霧機平臺、超聲波傳感器(Banner,T30UXIA)、控制器(Hydac,HY-TTC 60)、采集卡(NI USB-6351)、信號發生器(DG1022U)、傾角傳感器(Rion,SCA118T)和位移傳感器(MIRAN,KTC-400)等組成,如圖8所示。

1. 大型高地隙自走式噴霧機平臺 2. 超聲波傳感器 3. 測控系統(包括控制器、采集卡、PC、電源和信號發生器)4. 傾角傳感器 5.噴桿主動懸架比例閥 6. 噴桿懸架阻尼控制閥 7. 噴桿主動懸架液壓缸
5.2 主動懸架動力學試驗
將噴桿完全展開至水平狀態,分別手動打開主動懸架控制閥至最大開口,控制主動懸架液壓缸活塞桿以最大速度伸出使噴桿傾斜,試驗結果如圖9所示。

圖9 噴桿主動懸架動力學實車試驗曲線
由圖9a分析可知,在液壓系統推動下,一側主動懸架液壓缸活塞桿位移成線性增加,4.8 s時增加到最大值160 mm,伴隨著一側主動懸架液壓缸活塞桿位移的增加,另一側液壓缸位移線性減小160 mm,同時噴桿傾角基本成線性增加到0.56 rad左右;由圖9b可知,在噴桿主動傾斜過程中,主動懸架液壓缸負載壓力從1.5 MPa左右增加到6.8 MPa,此時液壓缸負載力最大為1.87×104N。以上試驗結果和圖2仿真結果中的噴桿最大傾角0.06 rad和最大負載1.7×104N有著較好的一致性,證明了所建立的噴桿主動懸架動力學模型的正確性。
5.3 實車跟隨試驗
試驗中,通過安裝在噴桿兩側超聲波傳感器實時測量噴桿兩側距離地面的高度,為排除田間地面不平整或者植物冠層高度層次不齊的干擾,需以1時間間隔連續進行10次離地或者冠層高度數據采集,并且剔除掉與其他數據差值絕對值大于D的數據,最終將10次采集數據的平均值作為有效高度值,然后根據式(43)計算獲得噴桿傾角反饋量。
式中1,2分別為兩側超聲波測量距離,m;為兩側超聲波安裝距離,m。
1和D分別通過作業車速和植物高度進行確定,經過多次田間試驗確定兩者的取值分別為0.02 s和5 cm。
以信號發生器產生的方波、不同頻率正弦車身傾角模擬信號為輸入,以試驗時間為橫坐標,以噴桿傾角為縱坐標,得到不同控制算法、不同信號下的噴桿主動懸架控制試驗曲線,如圖10所示。

圖10 噴桿主動懸架實車跟隨試驗曲線
由圖10分析可知,輸入階躍信號時,主動懸架PID控制存在比較明顯的振動過程,響應時間為4 s,超調量0.01 rad,靜態誤差0.002 rad,而自適應模糊滑模控制的響應時間在2 s左右,且曲線基本不存在振動,但存在靜態誤差0.002 rad左右;輸入信號為正弦信號時,PID控制滯后和振動都較明顯,而自適應模糊滑模控制的響應曲線僅滯后2 s,基本不存在振動,但存在0.002 rad的跟隨誤差。通過噴桿主動懸架的PID控制和自適應模糊滑模控制效果對比,可以看出本文設計的自適應模糊滑模控制相較于普通的PID控制響應速度更快、穩定性更好、精確度更高,可以滿足噴桿主動懸架的控制要求。
5.4 田間試驗
為了驗證噴桿主動懸架隔離干擾性車身擺動的性能,在冬季時選擇五征一處凹凸不平的沙土地為試驗地點,進行噴桿主動懸架田間試驗。噴桿主動懸架性能實車測試平臺以3 km/h車速行駛,如圖11所示,利用超聲波傳感器實時采集噴桿兩側距離地面的高度以獲得噴桿傾角,利用車身傾角傳感器采集車身的傾角變化,以試驗時間為橫坐標,以車身傾角和噴桿傾角作為縱坐標,得到主動懸架過程田間噴桿傾角試驗曲線如圖12所示。
由圖12可知,噴霧機在田間行駛的過程中,相對于車身擺動傾角–0.015~0.015 rad,噴桿懸架主動懸架控制使噴桿傾角始終保持在–0.005~0.005 rad范圍內。通過田間試驗可以證明本文設計的噴桿主動懸架控制算法能夠保證噴桿不受車身擺動的影響保持在平衡位置,可以滿足噴霧機作業需求。

圖11 噴桿主動懸架田間試驗
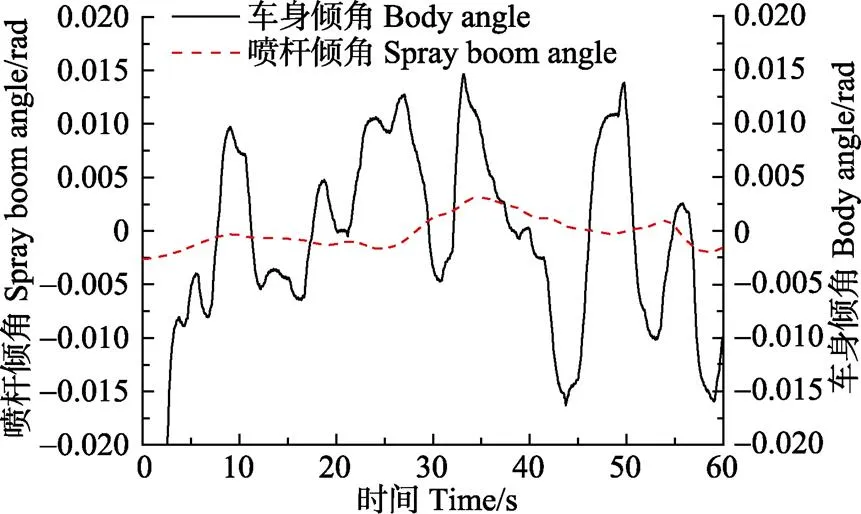
圖12 噴桿主動懸架田間試驗曲線
6 結 論
1)在建立了噴桿主動懸架動力學模型和噴桿主動懸架液壓系統模型的基礎上,充分考慮噴桿主動懸架控制特點,提出了基于自適應模糊滑模控制算法的噴桿主動懸架控制方法。通過和傳統的PID控制的對比仿真驗證,結果表明在噴桿主動懸架系統存在非線性、不確定性和參數時變性的情況下,所設計的自適應模糊滑模控制算法仍能保持良好的信號跟蹤性能,且控制信號更平穩,沒有高頻抖振。
2)在系統輸入為車身模擬擺動時,采用基于自適應模糊滑模控制算法的噴桿主動懸架控制方法,噴桿傾角實車跟隨響應時間為2 s,跟隨誤差0.002 rad,相較于PID控制都有所減小;進行田間試驗時,噴桿主動懸架可以使噴桿傾角保持在–0.005~0.005 rad范圍內,驗證了噴桿主動懸架控制的響應性、穩定性和準確性。
論文提出的基于自適應模糊滑模控制算法的噴桿主動懸架控制方法,可以很好的隔離干擾性車身擺動,保證噴桿的穩定性。
[1] Langenakens J J, Clijmans L, Ramon H, et al. The effects of vertical sprayer boom movements on the uniformity of spray distribution[J]. Journal of Agricultural Engineering Research, 1999, 74(3): 281-291.
[2] Ramon H, Baerdemaeker J D. Spray boom motions and spray distribution: Part 1,Derivation of a mathematical relation[J]. Journal of Agricultural Engineering Research, 1997, 66(1): 23-29.
[3] Ramon H, Missotten B, Baerdemaeker J D. Spray boom motions and spray distribution: Part 2, Experimental validation of the mathematical relation and simulation results[J]. Journal of Agricultural Engineering Research, 1997, 66(1): 31-39.
[4] Langenakens J J, Ramon H, et al. A model for measuring the effect of tire pressure and driving speed on horizontal sprayer boom movements and spray pattern[J]. Transactions of the ASAE, 1995, 38(1): 65-72.
[5] Ramon H, Anthonis J, Moshou D, et al. Evaluation of a cascade compensator for horizontal vibrations of a flexible spray boom[J]. Journal of Agricultural Engineering Research, 1998, 71(1): 81-92.
[6] Parloo E, Guillaume P, Anthonis J, et al. Modelling of sprayer boom dynamics by means of maximum likelihood identification techniques, Part 1: A comparison of input-output and output-only modal testing[J]. Biosystems Engineering, 2003, 85(2): 163-171.
[7] Heylen W, Parloo E, Swevers J, et al. Modelling of sprayer boom dynamics by means of maximum likelihood identification techniques, Part 2: Sensitivity-based mode shape normalisation[J]. Biosystems Engineering, 2003, 85(3): 291-298.
[8] 張際先. 噴霧機懸架的優化設計[J]. 農業機械學報,1995(1):50-55. Zhang Jixian. Design optimization of sprayer suspension[J]. Transactions of the Chinese Society for Agricultural Machinery, 1995, (1): 50-55.
[9] 陳晨,薛新宇,顧偉,等. 噴霧機噴桿懸架系統的研究現狀及發展[J]. 中國農機化學報,2015,36(3):98-101. Chen Chen, Xue Xinyu, Gu Wei, et al. Current situation and development trend of spray boom suspension system for sprayer[J]. Journal of Chinese Agricultural Mechanization,20l 5, 36(3): 98-101.
[10] Anthonis J, Deprez K, Lannoije M, et al. Mathematical modelling and comparison of several passive vertical spray boom suspensions[J]. Theatre Journal, 2002, 54(3): 499-500.
[11] 崔龍飛,薛新宇,丁素明,等. 大型噴桿及其擺式懸架減振系統動力學特性分析與試驗[J]. 農業工程學報,2017,33(9):61-68. Cui Longfei, Xue Xinyu, Ding Suming, et al. Analysis and test of dynamic characteristics of large spraying boom and pendulum suspension damping system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of CSAE), 2017, 33(9): 61-68. (in Chinese with English abstract)
[12] Frost A R. Simulation of an active spray boom suspension[J]. Journal of Agricultural Engineering Research, 1984, 30(84): 313-325.
[13] Marchant J A, Frost A R. Simulation of the performance of state feedback controllers for an active spray boom suspension[J]. Journal of Agricultural Engineering Research, 1989, 43(43): 77-91.
[14] Marchant J A, Frost A R. Simulation of the performance of state feedback controllers for an active spray boom suspension[J]. Journal of Agricultural Engineering Research, 1989, 43(43): 77-91.
[15] O'Sullivan J A. Verification of passive and active versions of a mathematical model of a pendulum spray boom suspension[J]. Journal of Agricultural Engineering Research, 1988, 40(2): 89-101.
[16] Deprez K, Anthonis J, Ramon H, et al. PM—power and machinery: Development of a slow active suspension for stabilizing the roll of spray booms, Part 2: Controller design[J]. Biosystems Engineering, 2002, 81(3): 273-279.
[17] 崔龍飛,薛新宇,丁素明,等. 雙鐘擺主被動懸架式大型噴霧機噴桿動力學仿真與試驗[J]. 農業機械學報,2017,48(2):82-90. Cui Longfei, Xue Xinyu, Ding Suming, et al. Modeling and simulation of dynamic behavior of large spray boom with active and passive pendulum suspension [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(2): 82-90. (in Chinese with English abstract)
[18] Tahmasebi M, Rahman R A, Mailah M, et al. Roll movement control of a spray boom structure using active force control with artificial neural network strategy[J]. Journal of Low Frequency Noise Vibration & Active Control, 2015, 32(32): 189-202.
[19] Anthonis J, Ramon H. Design of an active suspension to suppress the horizontal vibrations of a spray boom[J]. Journal of Sound & Vibration, 2003, 266(3): 573-583.
[20] Hasan A R, Prehim J. Ag sprayer boom control using fuzzy controller[J]. International Proceedings of Economics Development & Research, 2013, 63(17): 83-87.
[21] 魏新華,邵菁,繆丹丹,等. 噴桿式噴霧機噴桿高度及平衡在線調控系統[J]. 農業機械學報,2015,46(8):66-71. Wei Xinhua, Shao Jing, Miao Dandan, et, al. Online control system of spray boom height and balance[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(8): 66-71. (in Chinese with English abstract)
[22] Bonchis A, Corke P I, Rye D C, et al. Variable structure methods in hydraulic servo systems control [J]. Automatica, 2001, 37(4): 589-595.
[23] Benayache R, Chrifi-Alaoui L, Bussy P. Adaptive backstepping sliding mode control of hydraulic system with nonlinear unknown parameters[C]. Control & Automation. IEEE, 2010: 23-28.
[24] Guan C, Pan S. Adaptive sliding mode control of electro- hydraulic system with nonlinear unknown parameters[J]. Control Theory & Applications, 2008, 16(11): 1275-1284.
[25] 劉金琨,孫富春. 滑模變結構控制理論及其算法研究與進展[J]. 控制理論與應用,2007,24(3):407-418. Liu Jinkun, Sun Fuchun. Research and development on theory and algorithms of sliding mode control [J]. Control Theory & Applications, 2007, 24(3): 407-418. (in Chinese with English abstract)
[26] 陳雨. 高地隙噴霧機獨立式立軸空氣懸架設計方法與特性研究[D]. 北京:中國農業大學, 2017. Chen Yu. Research on Dynamic Characteristics of Independent Strut Type Air Suspension System for High Clearance Sprayer[M]. Beijing: China Agricultural University, 2017. (in Chinese with English abstract)
[27] 宋錦春. 液壓技術實用手冊[M]. 北京:中國電力出版社,2011.
[28] Liu Jinyi, Tan Jingquan, Mao Enrong, et al. Proportional directional valve based automatic steering system for tractors[J]. Frontiers of Information Technology & Electronic Engineering, 2016, 17(5): 458-464.
[29] 李良,李鋒,馮永保,等. 基于自適應模糊滑模的大型液壓起豎系統控制策略研究[J]. 兵工學報,2016,37(1):71-76. Li Liang, Li Feng, Feng Yongbao, et al. Research on control strategy of large hydraulic erecting system based on adaptive fuzzy sliding mode[J]. Acta Armamentarii, 2016, 37(1): 71-76. (in Chinese with English abstract)
[30] 陳隨英. 高地隙自走式噴霧機全工況滑轉率控制方法研究[D]. 北京:中國農業大學,2017. Chen Suiying. Research on Slip-Ratio Control Method for High Clearance Self-Propelled Sprayer Over all Operating Conditions[M]. Beijing: China Agricultural University, 2017. (in Chinese with English abstract)
Adaptive fuzzy sliding mode control of spray boom active suspension for large high clearance sprayer
Xue Tao1, Li Wei1, Du Yuefeng1, Mao Enrong1※, Wen Haojun2
(1.100083,; 2.832000,)
The large high clearance self-propelled sprayers with the advantages of high efficiency, environmental protection and intelligentization have been widely used worldwide. The spray boom suspension system is an important part of the large high clearance self-propelled sprayer, whose structure and performance have an important influence on the stability and life of the spray boom as well as the uniformity of spray. In order to solve the problems that the spray boom is easily affected by the body swing of the sprayer to generate harmful motions such as rotation, deflection, shaking and the like, the structure and function of the existing spray boom suspension systems were comprehensively analyzed, and a two-link trapezoidal spray boom suspension system was designed. In view of the problems of poor performance of isolated interference body swing of spray boom passive suspension, a hydraulic cylinder is added on the spray boom passive suspension to obtain an active suspension, which can not only take advantage of the input of external energy to actively adjust the spray boom posture, but also retain the high-frequency isolation performance of the spray boom passive suspension to avoid the high frequency response of the active suspension that consumes a lot of energy. In the light of the dynamics and the hydraulic system characteristics of spray boom active suspension, the control method based on adaptive fuzzy sliding model control algorithm of boom active suspension were developed with the spray boom inclination angle as the control object and the control objectives of fast response, stability and accuracy. On the basis of the established dynamic model of the spray boom active suspension, the dynamic characteristics of the active suspension were simulated and analyzed by Matlab/Simulink, which provides the basis for the effectiveness of the control method. A real vehicle test platform of the spray boom suspension system based on high clearance self-propelled sprayers developed by the research group were built. The dynamic characteristics of the active and passive suspensions of spray boom were tested by the actual vehicle following test and field test, and the results were compared and analyzed with the simulation results of the model. The test result shows that: when adopting the active boom suspension control method based on adaptive fuzzy sliding mode control algorithm, the step response time and the following error of the boom dip angle is 2 s and 0.002 rad, which are decreased compared to PID control. In the field test, the spray boom active suspension can keep the inclination angle of the boom in the range of –0.005-0.005 rad. The results show that the active suspension control method proposed in this paper has good responsiveness, stability and accuracy, and can effectively isolate the disturbing body swing and keep the spray rod stable. The study promote the development of theory for the spray boom active suspension in China, and it is conducive to the development of the large high clearance sprayer in China.
agricultural machinery; spraying; control; large high clearance sprayer; spray boom active suspension; adaptive fuzzy sliding mode control
10.11975/j.issn.1002-6819.2018.21.006
210.7015
A
1002-6819(2018)-21-0047-10
2018-05-23
2018-08-22
“十三五”國家重點研發計劃“研發自走式高桿作物施藥技術和智能化裝備”(2016YFD0200705)
薛 濤,山東淄博人,博士生,主要從事車輛智能控制研究。Email:xuexintao@126.com
毛恩榮,山西運城人,教授,博士,博士生導師,主要從事農業機械設計,液壓傳動以及自動控制研究。Email:gxy15@cau.edu.cn
薛 濤,李 偉,杜岳峰,毛恩榮,溫浩軍.大型高地隙噴霧機噴桿主動懸架自適應模糊滑模控制[J]. 農業工程學報,2018,34(21):47-56. doi:10.11975/j.issn.1002-6819.2018.21.006 http: //www.tcsae.org
Xue Tao, Li Wei, Du Yuefeng, Mao Enrong, Wen Haojun.Adaptive fuzzy sliding mode control of spray boom active suspension for large high clearance sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(21): 47-56. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.21.006 http: //www.tcsae.org
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32