磁致伸縮導波技術在纖維增強塑料錨桿中的應用
2018-11-06 06:24:36,,,
濟南大學學報(自然科學版) 2018年6期
, ,,
(1. 石家莊鐵道大學 電氣與電子工程學院, 河北 石家莊 050043; 2. 石家莊市第二中學, 河北 石家莊 050000)
纖維增強塑料(FRP)錨桿耐腐蝕性強,抗拉、抗剪強度高,體積小,目前已在煤礦、公路等工程中得到了廣泛的應用[1-2]。我國目前對FRP錨桿的研究多集中在力學性能,而在役錨桿的健康診斷方面并不成熟[3]。磁致伸縮導波技術作為新型檢測方式,克服了傳統檢測方式的局限性,具有非接觸、距離長、無需耦合劑等特點,可對材料的健康狀況進行快速、精確檢測[4-5]。實際工程檢測中由于工程環境復雜,且磁致伸縮導波信號較弱,易淹沒在噪聲中,因此所測得信號需要經過處理才能獲取精確信息。
FRP錨桿的檢測方式主要為應力波反射法,劉洋等[6]提出將磁致伸縮導波技術引入錨桿檢測。磁致伸縮效應只能應用于鐵磁材料,朱龍翔等[7]通過在不銹鋼管道表面粘貼鐵鈷帶的方式,對非鐵磁性管道進行檢測,分析得到了不銹鋼管的缺陷位置。磁致伸縮導波信號處理主要為帶通濾波、小波包變換,上述2種方法對噪聲的抑制都起到了良好的效果,但是對回波信號抑制也較為明顯,導致隨著信號的衰減,后續回波信號特征難以辨別。
本文中搭建基于磁致伸縮效應的FRP檢測系統,針對磁致伸縮回波信號的特點,采用變分模態分解-最小均方誤差估計(VMD-MMSE)信號處理方式,首先使用VMD算法將信號分解為多個模態,對各層信號進行濾波后重構,通過MMSE增強算法提高信號信噪比,最后實驗驗證磁致伸縮導波技術在FRP錨桿無損檢測中的應用。
1 FRP錨桿檢測方式
1.1 超聲導波檢測機理
磁致伸縮效應是指鐵磁性材料在高頻磁場的影響下發生形變,由此形變會在材料內產生超聲導波。相反,若鐵磁性材料受力產生形變時,則會在材料表面產生相應的磁場,此現象為磁致伸縮逆效應。FRP錨桿為纖維增強復合材料,不具有鐵磁性,錨桿本身不能產生磁致伸縮效應,但可在FRP錨桿表面用改性丙烯酸脂粘貼一層鎳帶。鎳帶磁致伸縮性能良好,在高頻磁場作用下會產生磁致伸縮現象,從而帶動FRP錨桿振動。電磁超聲導波在FRP錨桿中傳播,在遇到缺陷或端面時反射,當超聲導波傳播到磁致伸縮換能器接收端時,鎳帶會發生形變進而產生磁場,交變磁場經由磁致伸縮換能器轉化為感應電壓。
1.2 檢測裝置
FRP錨桿檢測裝置原理如圖1所示。用信號發生器產生有時間間隔的正弦波脈沖信號,再經由功率放大器將脈沖信號放大,驅動磁致伸縮換能器線圈產生高頻交變磁場。鎳帶在高頻磁場的作用下產生磁致伸縮現象,帶動FRP錨桿伸縮從而產生超聲導波。超聲導波在FRP錨桿內遇到端面會反射,導波傳播到磁致伸縮換能器接收端時,FRP錨桿則會帶動鎳帶伸縮,鎳帶發生磁致伸縮逆效應產生感應電壓。將實驗室現有的信號發生器、信號調理電路、功率放大器、采集電路組成磁致伸縮檢測系統[8],如圖2所示。
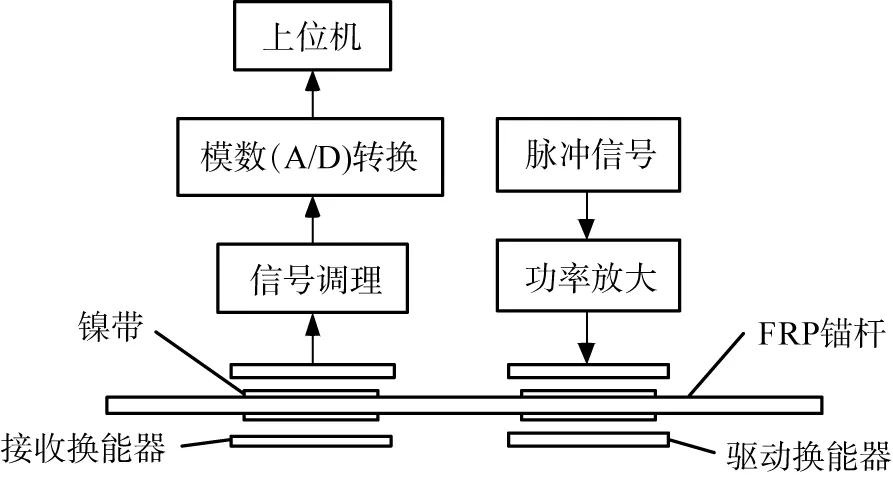
圖1 纖維增強塑料(FRP)錨桿檢測系統原理
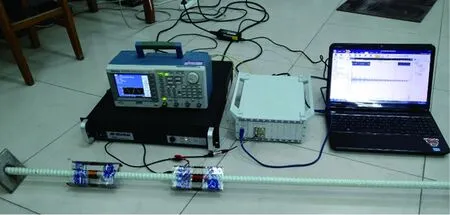
圖2 纖維增強塑料(FRP)錨桿實驗檢測系統
2 VMD-MMSE算法
2.1 VMD基本原理
VMD過程實質是變分問題的迭代求解過程,可分為變分模型的建立和求解,是基于維納濾波、希爾伯特變換等原理的自適應分解算法。VMD流程[9]如下。
1)根據希爾伯特變換,計算各模態的分解信號,其單邊頻譜為
(1)
式中:t為時間;δ(t)為脈沖函數;Uk(k=1,2,…,K)為實際信號分解而得的第k個離散模態信號。
2)把各模態的頻譜調制到對應的基頻帶上,即
(2)
式中e-jωkt(k=1,2,…,K)為分解后的信號混合中心頻率。
3)分析各模態中心頻率ωk附近的頻率,ωk的帶寬由上述解信號平滑度計算,可得變分公式
(3)
(4)

(5)
式中:α為二次懲罰因子;λ(t)為拉格朗日乘法算子。
2.2 MMSE基本原理
帶噪信號為y(n)=x(n)+d(n),其中n為采樣點數,x(n)為無噪聲信號,d(n)為噪聲信號。將時域轉換為頻域Y(w)=X(w)+D(w)[10],其中Y(w)、X(w)、D(w)分別為y(n)、x(n)、d(n)的頻域形式,得最優對數MMSE估計器為
(6)
(7)
式中:Glsa(εk,Vk)(k=1,2,…,K)為對數MMSE的增益函數;Yk為含噪信號的頻域分量;前校驗信噪比εk為第k個頻譜分量的信噪比;后校驗信噪比γk為原始加入噪聲后的第k個頻譜分量的信噪比。
(8)
(9)
式(6)中僅Yk為已知量,無噪信號的方差通過判決引導法估計[11],結果為
(1-β)max{γk(m)-1,0}
,
(10)
式中:β為平滑因子,取0.98;m為當前幀數(m=1,2,…,k)。
2.3 VMD-MMSE算法
將VMD與MMSE算法進行組合,VMD將信號分解進行逐層濾波,再通過MMSE算法把信號譜加強[12],VMD-MMSE算法實現流程如下:
1)分解信號,逐層濾波。
2)將原始信號分幀,加Hanmming窗。
3)對各幀原始信號進行傅里葉變換。
5)用估計式(10)計算加強信號增量。
6)重新加強信號,再估計信號的快速傅里葉逆變換(IFFT),生成增強后的信號。
3 實驗檢測
3.1 數據采集
磁致伸縮所產生的超聲導波模態有多種, 且不同材料的頻散曲線也不同, FRP錨桿群速度頻散曲線如圖3所示。 由圖可知,L(0, 2)模態導波在低頻階段隨頻率變化導波傳播速度變化較快, 不易于確定導波準確波速,F(1, 1)模態在高頻信號下特性較好, 但低頻階段難以觸發。L(0, 1)縱向模態低頻
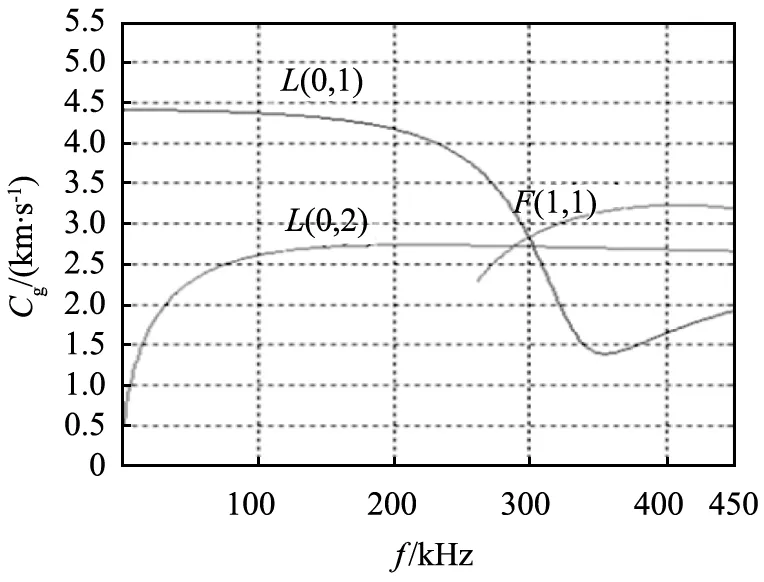
Cg—群速度;L(0, 1)、 L(0, 2)—縱向模態導波;F(1,1)—彎曲模態導波; f—頻率。
波速變化率平穩易取得波速的準確值, FRP錨桿本身帶有螺紋, 產生L(0, 1)模態導波只須直接將鎳帶與FRP錨桿直接耦合即可, 易于觸發且此模態導波觸發頻率低, 在低頻狀態下不易與其他模態導波發生混疊現象, 因此采用L(0, 1)模態信號作為檢測信號。
實驗室現有自由FRP錨桿長度為196 cm,將磁致伸縮換能器激勵端中心置于距左端面30 cm處,接收端中心置于距左端面69 cm處;在距左端面135 cm處,沿周向方向刻一個深度為4 mm且寬度為1.5 mm的缺陷。激勵端鎳帶的寬度為8 cm,線圈寬度為7 cm, 所用漆包線直徑為0.51 mm, 接收端鎳帶寬度為5 cm,線圈寬度為4 cm,所用漆包線直徑為0.31 mm,用膠帶將偏置磁場固定。圖4所示為線圈與缺陷的位置示意圖。激勵端通入頻率為30 kHz的脈沖正弦波信號。上位機接收到的回波電壓信號如圖5所示,原始信號頻譜如圖6所示。由圖可知,原始信號噪聲較高,須經信號處理。
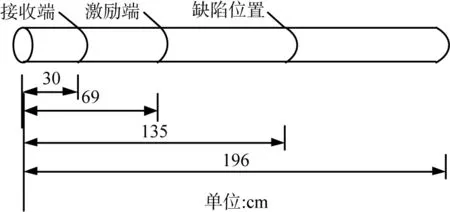
圖4 纖維增強塑料(FRP)錨桿缺陷位置示意圖
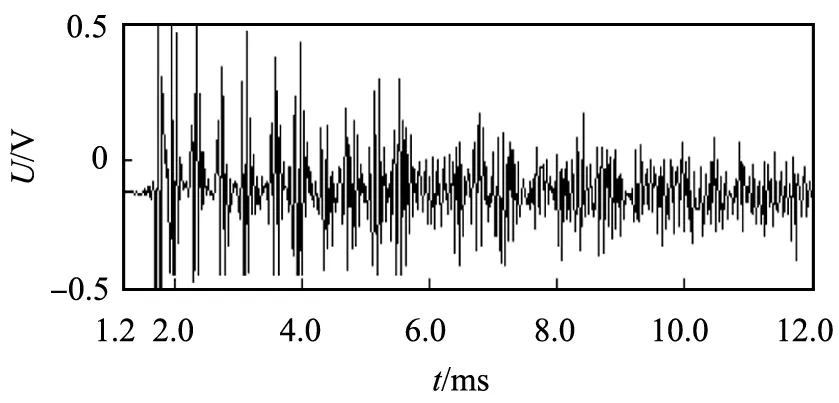
U—接收線圈接收電壓幅值; t—采集時間。
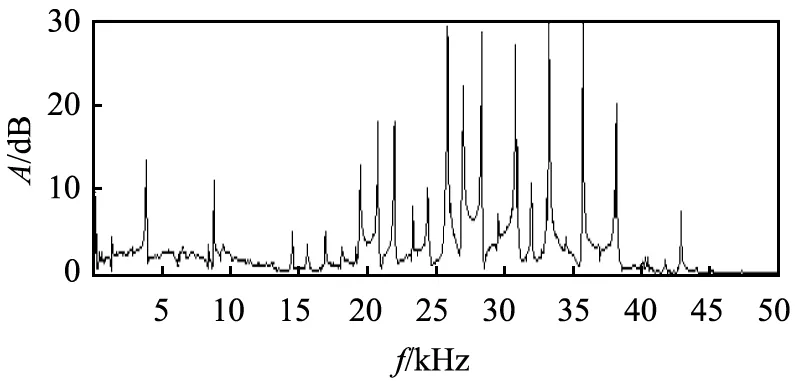
A—振幅; f—頻率。
3.2 缺陷檢測
系統采集到的信號信噪比約為8 dB, 電磁超聲信號檢測中通常要求信號信噪比為16.5~20 dB, 直接采集到的信號信噪比低, 須經信號處理。 首先, 將信號分解為5種模態, 分解結果如圖7所示。
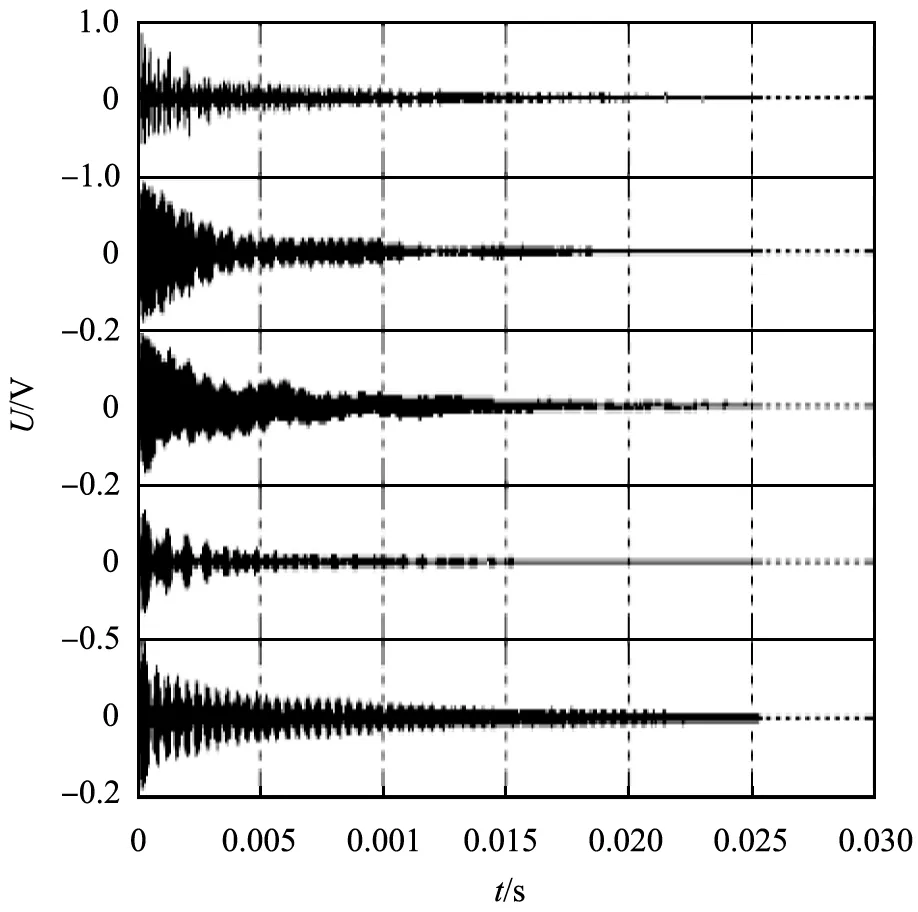
U—接收線圈接收電壓幅值; t—采集時間。
各層信號進行濾波,再將濾波后信號進行重構。將FRP錨桿檢測原始信號進行VMD處理后重構信號與信號頻譜如圖8所示。 由圖可知, VMD可有效地將原始信號各模態的部分噪聲濾除, 相對于原始信號,VMD處理后的信號特征更為明顯,經過經驗模態分解(EMD)[13]處理后信號的信噪比較小且信號特征仍不明顯(見圖9),與VMD算法相比,濾波效果較差,因此采用VMD算法進行分層濾波處理,處理后的回波信號頻率近似于激發信號頻率。

U—接收線圈接收電壓幅值; t—采集時間。(a)重構信號
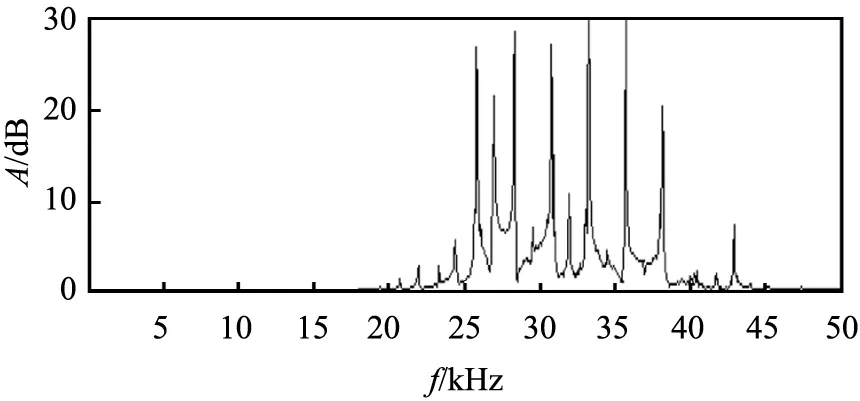
A—振幅; f—頻率。(b)信號頻譜

U—接收線圈接收電壓幅值; t—采集時間。
經VMD分解重構后,信號起始部分特征較為明顯,隨著信號衰減逐漸淹沒在噪聲中,特征難以辨別,此時必須對信號進行增強,將信號通過MMSE增強算法進行處理,進一步提升信號信噪比,濾除相關高頻噪聲,濾波結果與頻譜分析如圖10所示。由圖可知,濾波后信號的信噪比約為22 dB,滿足檢測要求。經濾波處理、多次反射后的信號特征仍可明顯辨別,可對FRP錨桿狀況進行多次判斷和檢測驗證。

U—接收線圈接收電壓幅值; t—采集時間。(a)重構信號
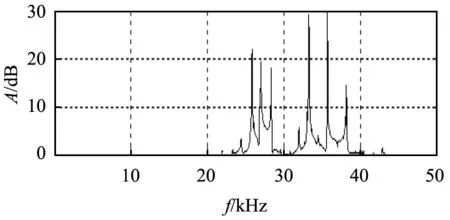
A—振幅; f—頻率。(b)信號頻譜
FRP錨桿中超聲導波傳播在頻率為30 kHz時L(0,1)導波在FRP錨桿中的傳播速度約為4 500 m/s。 從圖10(a)中反射波形可知,右端面一次回波與首波相對時間為0.000 58 s,計算距離為130.5 cm,與實際FRP錨桿相差0.5 cm;第2次左端面回波與第1次左端面回波信號相對時間0.000 882 s,計算距離為397 cm即錨桿長度的2倍,得錨桿長度計算距離為198.5 cm。設置缺陷回波與首波相對時間為0.000 3 s,計算距離為67.5 cm,缺陷相對激勵端位置實際距離為66 cm,誤差為1.75 cm。對實驗室內2、3號FRP錨桿進行檢測,其中2號FRP錨桿長度為1.5 m,缺陷距激勵端為40 cm,3號FRP錨桿長度為2.49 m,缺陷距激勵端為95 cm,1、2、3號FRP錨桿檢測實驗結果如表1所示。根據錨桿無損檢測規范要求,應力波反射法錨桿健康狀況檢測誤差一般為實際值的5%,本檢測系統檢測誤差約為1.3%,優于傳統的應力波反射檢測方法,誤差滿足檢測要求。根據上述的實驗結果分析,磁致伸縮導波技術可應用于FRP錨桿的缺陷及長度檢測。
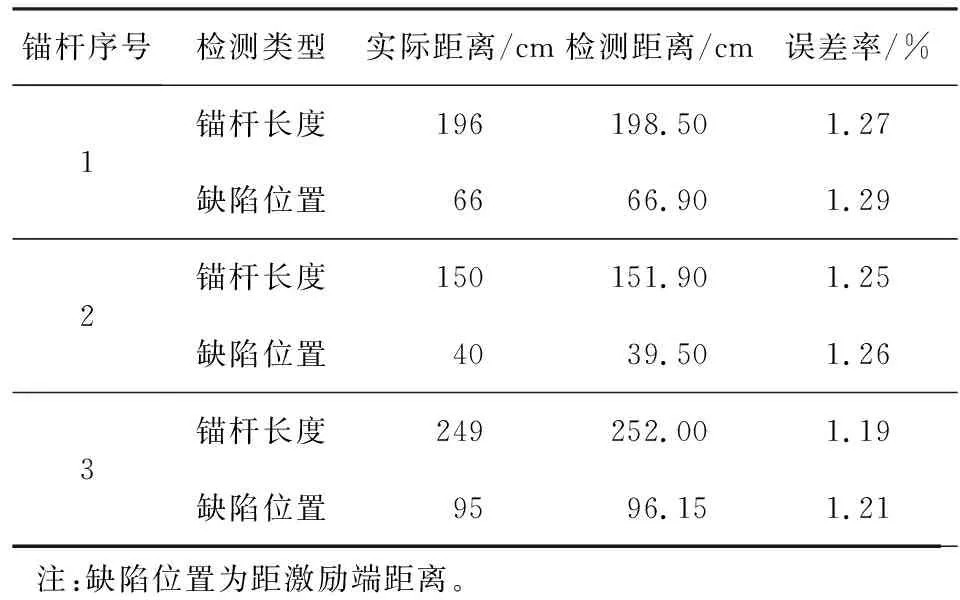
表1 實驗檢測結果
4 結論
本文中搭建了基于磁致伸縮機理的FRP錨桿檢測系統,提出了VMD-MMSE的信號處理方法,通過實驗成功激發和接收到磁致伸縮導波信號,對磁致伸縮導波回波信號處理后,能通過回波信號特征準確識別FRP錨桿中的周向缺陷位置和FRP錨桿長度,且誤差較小。實驗結果表明,該方法可對FRP錨桿進行有效檢測。在實驗過程中,FRP錨桿只作為超聲導波傳播的載體,不對超聲導波的產生和接收產生影響,因此附著鎳帶產生磁致伸縮超聲導波進行磁致伸縮檢測的方法可為其他非鐵磁性材料的檢測提供實驗依據。
猜你喜歡
山東冶金(2022年1期)2022-04-19 13:40:52
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
山東冶金(2019年1期)2019-03-30 01:34:56
電子制作(2018年11期)2018-08-04 03:25:42
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
工程建設與設計(2016年4期)2016-02-27 10:51:09
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39