切削加工作業中的機器人應用之研究
2018-11-08 03:47:26盧葵
信息記錄材料 2018年11期
盧 葵
(韶關市技師學院 廣東 韶關 512000)
1 引言
工業機器人的研究與應用是一項系統的工程,其主要涵蓋了工業制造、自動化以及現代控制、人工智能等前沿領域,在一定程度上推動了現代制造行業的發展。在切削加工作業中應用機器人具有靈活性良好、便于操作、實用性以及通用性較強的特征,可以有效的提升產品質量與效果。
2 切削加工作業中的機器人應用優勢
切削加工作業中應用機器人加工具有一定的優勢,在實踐中可以提升產品的加工品質以及產品的外表的整體光潔度,可以提升質量效果。同時,在切削加工中機器人可以持續工作,對于工作的環境沒有嚴格的要求,可以在一些噪音嘈雜且有害的環境中進行連續的工作,可以有效的提升整體的經濟效益。機器人在切削加工作業中具有一定的開發能力,可以基于不同的加工要求、條件狀況進行二次開發與研究,可以提升整個加工質量與效果。在切削加工作業中應用機器人可以降低傳統加工模式的資金成本投入,在提升產品品質的同時降低成本,對于企業的經濟效益提升有著積極的作用。
在切削加工機器人的應用中,主要就是通過示教再現以及離線編程的兩種模式為主要方式進行機器人的切削作業加工處理,但是,因為此種方式無法基于定位誤差、裝夾誤差等因素對各種機器人進行在線調整,完善其加工軌跡,就會無法保障其整體質量,精準度也無法系統控制,離線編程也會耗費大量的資金。現階段相關學者提出了基于實時調整加工軌跡的方式對機器人進行控制調整,可以在根本上增強機器人加工的自動化程度與能力,可以在根本上提升機器人切削加工的穩定性以及精準度。在根本上加強對機器人控制范圍的管理,效果相對較為顯著,在切削加工作業中有著較為顯著的優勢。
3 切削加工作業中的機器人應用之研究
3.1 切削加工作業中的機器人應用問題
在切削加工作業中應用機器人會出現一些不穩定的狀態與問題。例如,在機器人停止、啟動過程中,機器人的末端會出現一些抖動問題,在機器人運動到特定位置附近就會出現振動增大等問題;在機器人末端操作器運動過程中,其實際到達的位置與既定的作業點距離相差較大等問題。出現這種問題會直接的降低切削效果與質量,會給機器人的自身結構、機械帶來一定的磨損以及破壞性影響,會縮短應用壽命,在一定程度上會直接導致各種安全隱患問題的出現。
在切削加工中應用機器人必須要保障其運動的穩定性,要加強對機器人末端操作器位移、速度以及加速度變化的控制,合理控制,進而保障切削加工精準度。在實踐中,為了提升切削加工作業中機器人末端操作器的位移、速度以及加速度的控制質量,提升精準度,增強精準度,必須要對機器人切削加工作業的動作路徑進行規范與約束,對其進行合理規范,通過方針模擬的方式,在根本上避免在切削加工中出現振動、抖動等問題。
3.2 切削加工作業中的機器人應用軌跡規劃分析
因此,機器人在切削加工中應用的主要重點就是對其軌跡進行系統的研究分析,也就是通過對機器人作業中末端操作器在工作空間中達到特定位置的位移、具體的速度以及加速度之間的比例關系。在切削加工作業中對機器人進行軌跡規劃就是基于機器人末端操作器作為具體動作路徑的一種約束條件,通過對其末端操作器預先設置規劃的運動路徑進行計算機分析,利用數學函數對各項實際動作約束條件進行描述分析,綜合具體狀況進行末端操作器具體位移、速度以及加速度的推導分析,進而生成一定的運動軌跡。
對切削機器人進行軌跡規劃分析,就是基于機器人結構參數的實際狀況基礎之上,對各種信息參數進行系統分析,探究機器人的軌跡規劃方式,對工業機器人的切削加工預計工作路徑進行系統描述處理。通過對在工業機器人軌跡規劃研究,可以保障機器人在切削加工中的精準度,保障機器人在切削中可以平穩、快速以及精準的作業,提升機器人在各個施工作業環節中的平滑性以及穩定性,進而降低損壞以及磨損問題,保障整個操作流程中工作人員的安全。
3.3 切削加工作業中的機器人應用軌跡規劃設計
切削加工作業中必須要強化機器人應用分析,通過對機器人運動學理論分析,分析切削加工機器人的運動軌跡,對機器人的接班結構以及參數進行分析,通過任意質點在整個坐標系中的相關位姿進行描述方法、對相同質點在不同的坐標系中的坐標變換方法進行分析,基于D-H方法構建切削加工機器人的臂桿坐標系,對機器人的正、逆運動學方程進行分析,利用運動學的正向方程對其進行系統的驗證分析。在切削加工作業機器人中的力學控制器就是一個基于力反饋的位置的補償器,位置補償器的主要控制量就是機器人工具末端直角坐標系統中的位置補償量,控制器中的脈沖主要就就是對機器人關節的運動位置進行控制,必須必須要通過運動學逆解對機器人直角坐標系統的位置以及對應關節位置函數關系進行分析。在實踐中,首先要構建工具末端坐標系統,在一般工具坐標系中其僅于機器人末端坐標系存在平移關系。
然后進行機器人的力控制系統的設計。切削加工作業中應用的工業機器人在實踐中要加強對底層控制程序的控制,對此可以基于ARM以及SRI力傳感器進行力學系統的設計,這樣可以增強機器人的處理能力,在設計中可以通過基于uCos-II內核框架進行程序設計,將ARM作運行過程中數據采集以及反饋運算的工具,通過機器人控制進行位置環控制處理,其具體的力控制系統結構如圖1所示。
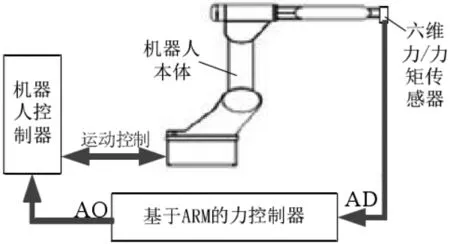
圖1 力學控制系統
在設計中,其應用的是基于控制為核心的ARM芯片,是一種基于Cortex-M3內核的32位微處理器,在應用中具有較為豐富的質指令集特征以及計算能力。在設計中可以基于uCos-II控制流程進實時任務的創設,通過任務的控制以及監控,對切削機器人進行信號處理以及反饋控制。
在切削加工作業中,機器人在接收到執行控制任務后,就會對存儲器中的力信號進行讀取,在利用uCos-II的消息郵箱進行力信號的傳遞,在監控任務中執行。然后,通過執行反饋控制程序,進行控制量的計算以及發送,在獲得消息油箱中的力信號之后,就可以開始監控任務。這種通過嵌入式的方式進行實時內核的力反饋控制方式可以同時開始任務的監控與執行,具有一定的穩定性以及實時性特征,可以保障機器人切削加工作業的精準性。
4 結語
在切削加工作業中應用機器人可以有效的提升加工質量,降低資金投入,節省人力資源,可以實現持續作業,對于產業效益的提升與增長有著積極的作用。但是在現階段中切削加工作業中應用機器人主要還是存在一定的問題,機器人的控制方式還是有待完善,對此文章主要對切削加工作業中機器的應用進行了簡單的探究分析,通過力控制設計優化調整加工軌跡的方式,提升機器人切削的自動化程度,進而提升機器人切削加工的穩定性以及精準度。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
故事大王(2016年7期)2016-09-22 17:30:08
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
兒童故事畫報(2013年3期)2013-06-24 05:40:30
