電力工程中的電力自動化技術應用研究
2018-11-08 03:09:36梁宏男
電子測試 2018年21期
梁宏男
(東北林業大學,黑龍江哈爾濱,150040)
1 電力自動化技術在配電網系統的應用
饋線自動化是配電網自動化的基礎,它可通過對配電網的實時監控、饋線設備的實時檢測,實現故障發生幾率的降低、故障恢復時間的縮短,從而有效提高配電可靠性和供電質量。饋線自動化系統[1]一般來說應該具備以下功能:正常狀態和事故狀態的實時監測;線路故障區段的定位、隔離、及時恢復;數據的采集、處理、統計分析;通過電壓調節減少線路損耗。
1.1 重合器-分段器配合型饋線自動化技術
這種饋線自動化技術在沒有通訊系統參與下運用,它參考就地電壓或電流的變化,直接對變電站出口的重合器或者自動分段器進行控制,提前設置好的邏輯動作可實現饋線系統的一般功能:故障的判斷、定位、隔離及實施恢復供電。
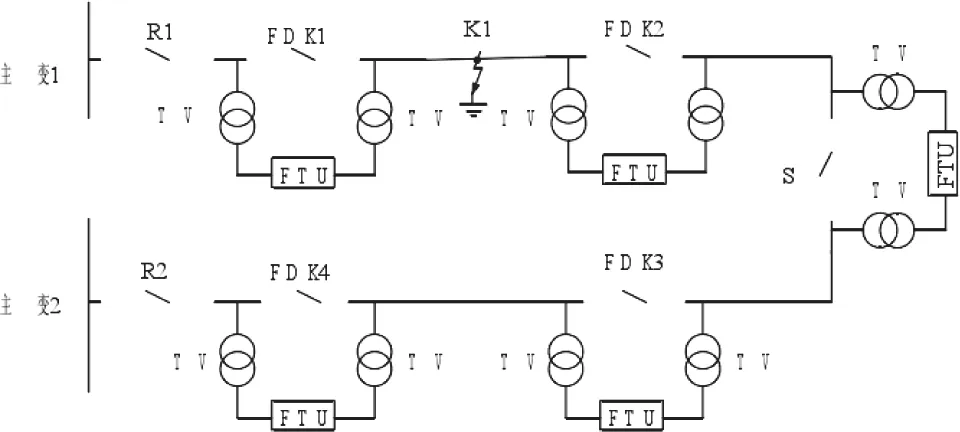
圖1 手拉手環網型饋線自動化技術
手拉手環網型是最常見的運行方式,圖1便是它的典型結構。聯絡開關S的工作方式為常開狀態、分段開關的工作方式為常閉狀態,當出現一側帶電另一側無電狀態時,聯絡開關能夠實現故障點下游非故障線路區段的供電功能,當出現兩側均無電的狀態時,分段開關可確認合閘并實現閉鎖功能。
1.2 集中控制型饋線自動化技術
采用這種技術的饋線系統與重合器-分段器配合型相反,它需要通信系統的參與來實現饋線終端故障信息的收集功能,除此之外,它還需要監測終端和控制站的共同協同參與。
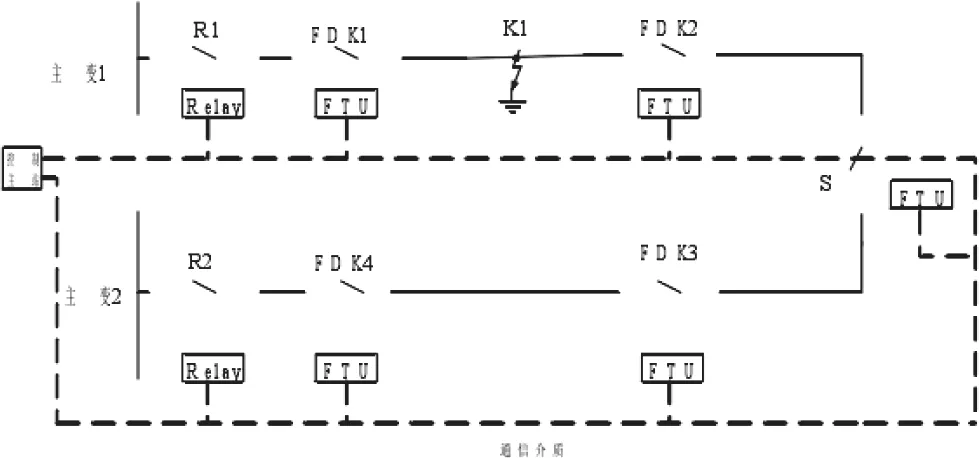
圖2 架空線路環網型集中控制饋線自動化系統
圖2 所展示的是架空環網型集中控制饋線系統,Relay即為饋線保護裝置,它能夠實現監測和通信功能。當故障點出現在k1時,R1會進行跳開動作,進而FTU監測到故障信息并將其發送到主站,此時主站便開始啟動相關處理程序。FTU繼續進行故障電流的檢測,由于故障點產生在K1,因此FDK1處將被檢測到故障電流,而FDK2處沒有。這時,通過FTU的檢測,主站就能夠進行故障位置的判斷,即處于二者之間。之后再進行自動或者手動進行故障處理、及時恢復非故障區域的供電。
1.3 基于點對點的分布式智能控制饋線自動化技術
這一技術的優越性體現在故障時間的恢復上,它能夠在數秒內就實現饋線系統的故障定位、隔離、恢復功能,大大減少了因產生故障而導致斷電的處理時間。
假若出線位置上無快速熔斷器,當K2點出現故障狀態時,系統正常進行故障的判斷、定位功能,FTU通過開關進行故障線路區段的隔離動作,并將合閘動作命令發送至Relay,進而進行線路主干線的供電恢復。而當出線位置上安裝有斷路器時,FTU便可在出現接地故障后將閉鎖動作命令發送至斷路器保護裝置,進而防止越級跳閘。因此,要加快主干線接地故障的消除速度,只需要縮短斷路器接地保護的動作延時即可。
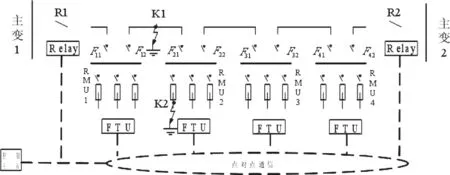
圖3 電纜環網的點對點分布式智能控制饋線字體
1.4 網絡保護型饋線自動化技術
隨著社會電氣化進程的演進,即使停電斷電幾秒鐘也有可能會造成嚴重的經濟后果和社會風險,因此網絡保護型饋線自動化技術應運而生,致力于實現不通過斷電就能高效排除故障。

圖4 網絡保護型饋線系統示意圖
如圖4,網絡保護型饋線系統用于閉環電纜環網。由于饋線的兩側電源來自于同一條線路,因此避免了電壓出現不同狀態,也因此避免了潮流問題。當線路呈現故障狀態時,進線開關可實現直接跳開故障位置兩側開關的功能,進而實現故障切除功能,從而達到不停電即可排除故障的目的。
2 電力自動化技術在智能變電站的應用
隨著電氣技術的發展,我國變電站的大多數信息都可通過智能終端的采集后實現傳送、遠程監控、調度等功能。順序控制[2]是指將所要執行的動作順序提前編制在程序里,輸入信號后,可根據具體要求實現自動、有序、規范地動作。通過順序控制技術,可實現智能變電站綜合系統的整站控制需求,進而達到變電站的更加智能化、綜合應用化。圖4展示了順序控制技術對智能變電站的要求。
圖5展示了基于順序控制技術的軟件流程和操作流程。隨著電網規模的擴展和變電站所轄設備數量的增多,控制技術的應用能夠適應電網方式的變更和安全自動裝置的調整。
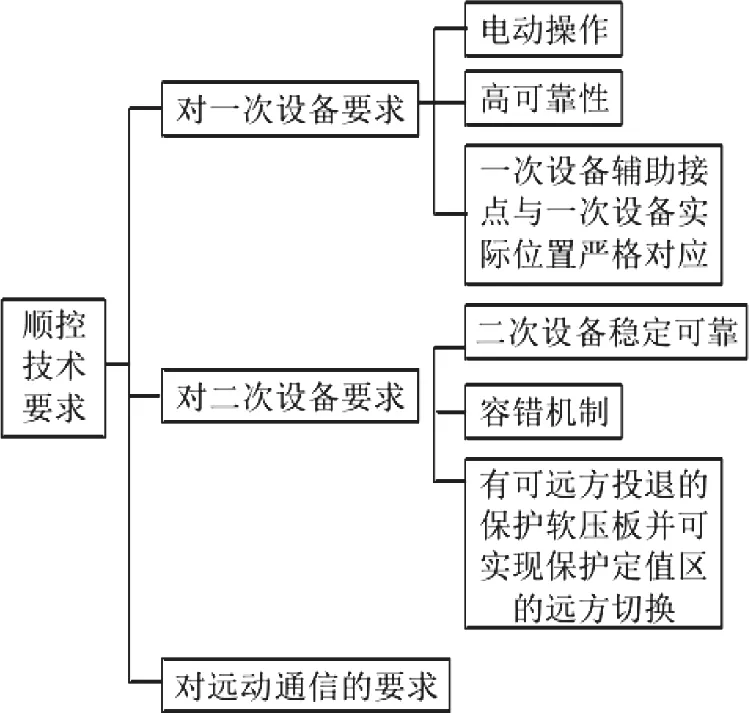
圖5 順序控制技術對智能變電站的要求
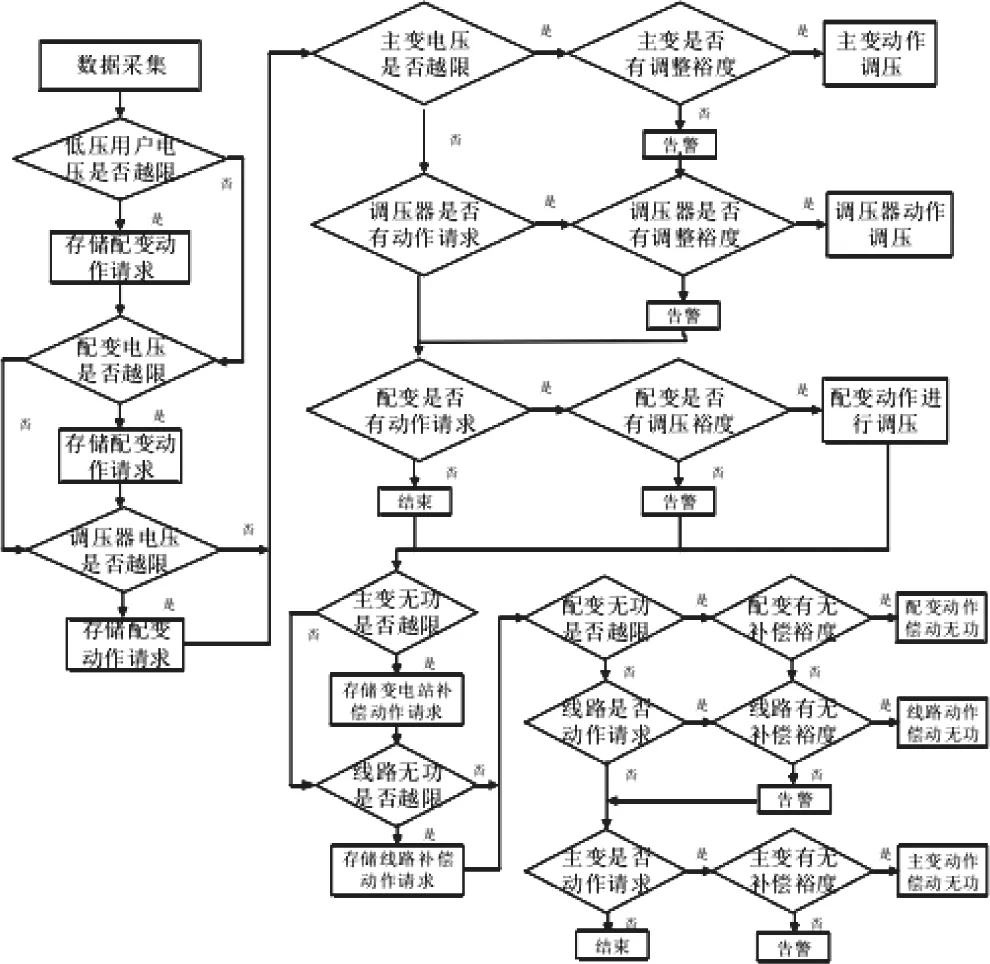
圖6 基于順序控制技術的軟件流程和操作流程
將此技術運用于智能變電站綜合自動化系統中,其需要符合IEC61850通信協議標準、支持GOOSE網絡通信機制、一定的容錯機制,實現保護測控功能、實時多任務操作功能、狀態數據準確及時的采集功能、操作順序的控制功能等。即系統結構分層分布化、一次設備智能化、二次設備網絡化、信息采集數字化。
3 結語
電力自動化技術應用于配電系統中,可有效降低故障發生率、縮短故障處理時間,應用于智能變電站系統中,可實現繁雜設備的智能操作控制,除此之外,其還可廣泛運用于調度系統等其他電力系統工程中,使得電網系統更加智能化、集約化,由此保障社會安全平穩運行。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
汽車維護與修理(2016年10期)2016-07-10 08:17:41
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
河南電力(2015年5期)2015-06-08 06:01:45
