1000 hp主動鉆井升沉補(bǔ)償絞車的研制
2018-11-11 09:29:44王福貴張強(qiáng)梁順安
機(jī)械工程師 2018年11期
關(guān)鍵詞:系統(tǒng)
王福貴, 張強(qiáng), 梁順安
(1.寶雞石油機(jī)械有限責(zé)任公司,陜西寶雞721002;2.國家油氣鉆井裝備工程技術(shù)研究中心,陜西寶雞721002)
0 引言
從世界海洋油氣儲量分布來看,大部分儲量都在深海,深海將成為未來油氣勘探開發(fā)的主戰(zhàn)場,深水浮式鉆井平臺的設(shè)計開發(fā)勢在必行[1-2]。受海浪作用的影響,浮式鉆井平臺跟隨海浪進(jìn)行升沉運(yùn)動,會造成鉆壓不穩(wěn),大大降低鉆井效率,嚴(yán)重時會導(dǎo)致鉆頭脫離井底,鉆井作業(yè)無法進(jìn)行。鉆柱升沉補(bǔ)償系統(tǒng)作為浮式平臺鉆井系統(tǒng)的一個關(guān)鍵系統(tǒng),其主要作用是通過提升系統(tǒng)的提升、下放補(bǔ)償平臺的升降,保持鉆柱相對井底靜止,從而消除波浪對鉆井作業(yè)的不利影響。
海洋補(bǔ)償類產(chǎn)品主要有游車升沉補(bǔ)償系統(tǒng)、天車升沉補(bǔ)償系統(tǒng)、絞車補(bǔ)償系統(tǒng)等幾種形式[3]。絞車補(bǔ)償系統(tǒng)作為鉆柱補(bǔ)償系統(tǒng)的一種,其關(guān)鍵技術(shù)長期以來一直被歐美等個別發(fā)達(dá)國家所壟斷[4],開發(fā)我國具有自主知識產(chǎn)權(quán)的絞車補(bǔ)償系統(tǒng)具有重要意義。
1 技術(shù)分析
海洋鉆井平臺的升沉運(yùn)動是由波浪及潮汐運(yùn)動而引起的,它的運(yùn)動曲線近似于簡諧運(yùn)動,其升沉位移由波高及船體或平臺的類型、結(jié)構(gòu)、尺寸等因素決定[5-7]。
影響補(bǔ)償絞車結(jié)構(gòu)及性能的關(guān)鍵參數(shù)主要有:驅(qū)動形式、最大輸入功率、最大補(bǔ)償功率、最大補(bǔ)償載荷、最大補(bǔ)償位移、最大補(bǔ)償速度、補(bǔ)償周期和補(bǔ)償精度等。特定海域和特定海況下的波浪特性曲線及平臺特性決定了升沉補(bǔ)償系統(tǒng)的最大補(bǔ)償位移和補(bǔ)償周期,由最大補(bǔ)償位移和補(bǔ)償周期可得出最大補(bǔ)償速度。根據(jù)補(bǔ)償絞車配套平臺鉆井井深所需的最大提升載荷等參數(shù),并結(jié)合平臺升沉特性參數(shù)可計算出補(bǔ)償絞車補(bǔ)償工況下的最大快繩拉力,根據(jù)計算出的快繩拉力和補(bǔ)償絞車的使用工況進(jìn)一步計算絞車的配套功率、關(guān)鍵結(jié)構(gòu)件相關(guān)參數(shù)及結(jié)構(gòu)強(qiáng)度。
1.1 補(bǔ)償原理
補(bǔ)償絞車控制系統(tǒng)中,絞車傳動軸編碼器及升沉加速度傳感器分別將游車相對位置以及船體的升沉運(yùn)動狀態(tài)數(shù)據(jù)實(shí)時發(fā)送到可編程控制器,控制器通過計算得到平臺升沉位移,根據(jù)平臺升沉位移通過控制器輸出控制信號控制絞車電動機(jī)的轉(zhuǎn)速及轉(zhuǎn)向,最終控制主動補(bǔ)償絞車的提升和下放,確保鉆柱相對井底靜止,達(dá)到主動升沉補(bǔ)償?shù)淖饔谩?/p>
1.2 設(shè)計計算
設(shè)計的主動升沉補(bǔ)償絞車擬配套于4000 m勘察船,作業(yè)區(qū)域?yàn)橹袊虾!?紤]南海海況信息及作業(yè)工況要求,補(bǔ)償絞車的設(shè)計按照最大風(fēng)力8級進(jìn)行計算,取海洋波浪有義波高Hs=5.3 m,周期10 s,則勘察船升沉幅值為2.7 m,周期10 s。游吊系統(tǒng)為4×5繩系,勘察船配置最大鉆柱為1200 kN。
船體隨海洋波浪的升沉運(yùn)動可假設(shè)為簡諧運(yùn)動[7-8]。
升沉位移公式為
升沉速度公式為

升沉加速度公式為

式中:xmax為船體升沉運(yùn)動幅值,xmax=2.7 m;T為船體升沉運(yùn)動周期,T=10 s。
通過計算,得出最大升沉速度為0.85 m/s,最大升沉加速度為0.53 m/s2。
補(bǔ)償絞車傳動系統(tǒng)和提升系統(tǒng)的總動能公式為

其中:ω1為絞車減速箱輸入軸(電動機(jī)輸出軸)角速度,rad/s;ω2為絞車減速箱中間軸角速度,rad/s;ω3為絞車減速箱輸出軸(滾筒軸) 角速度,rad/s;ω1/ω2=1.788;ω2/ω3=3.167;ω1/ω3=5.66。

圖1 絞車傳動系統(tǒng)及提升系統(tǒng)簡圖
絞車傳動及提升系統(tǒng)折算到電動機(jī)軸端上的轉(zhuǎn)動慣量公式為

根據(jù)傳動系統(tǒng)的特性,電動機(jī)角加速度公式為

式中,α為電動機(jī)角加速度,rad/s2。在轉(zhuǎn)動慣量恒定的情況下,電動機(jī)的轉(zhuǎn)矩越大,電動機(jī)的加速度越大,其加速效果越好。
升沉補(bǔ)償絞車在補(bǔ)償工況需要克服傳動系統(tǒng)及提升系統(tǒng)的轉(zhuǎn)動慣量,絞車的主電動機(jī)需具備足夠大的瞬時角加速度。
補(bǔ)償工況下,絞車的最大輸入功率公式為[9]

計算得出,補(bǔ)償絞車需要最大輸入功率1546 kW,絞車配備2臺800 kW交流變頻電動機(jī)。
在補(bǔ)償工況下,游吊系統(tǒng)的最大鉤速為V鉤=0.85 m/s,補(bǔ)償工況下絞車最大提升能力Q鉤=1410 kN。
1.3 聯(lián)合仿真
為了進(jìn)行升沉補(bǔ)償系統(tǒng)的特性對比、工作機(jī)理分析及控制參數(shù)匹配研究,對變頻驅(qū)動系統(tǒng)進(jìn)行了控制策略分析。補(bǔ)償絞車能夠?qū)崿F(xiàn)補(bǔ)償工況,主要是靠電氣控制系統(tǒng)控制電動機(jī)正、反轉(zhuǎn),從而使絞車滾筒周期性地提升、下放鉆柱,實(shí)現(xiàn)補(bǔ)償功能。針對補(bǔ)償絞車控制系統(tǒng)大慣性時滯、非線性時變的特點(diǎn),控制系統(tǒng)采用基于速度反饋的雙閉環(huán)算法,引入預(yù)估補(bǔ)償環(huán)節(jié)并列控制,對船體未來短期類運(yùn)動參數(shù)進(jìn)行主動預(yù)測,計算出船體運(yùn)動速度預(yù)測的前饋控制,消除時滯的影響,提高控制質(zhì)量。
基于速度反饋的控制特點(diǎn)對主動升沉補(bǔ)償絞車進(jìn)行建模,通過仿真分析,并根據(jù)大鉤的速度對速度反饋控制偏差進(jìn)行實(shí)時修正,形成基于速度反饋的補(bǔ)償控制技術(shù),在不同載荷工況下進(jìn)行仿真。圖2、圖3為最大鉆柱工況下補(bǔ)償位移仿真曲線和鋼絲繩載荷仿真曲線,表1為不同載荷和不同海況下仿真得到的補(bǔ)償精度性能對比。

圖2 最大鉆柱下補(bǔ)償效果
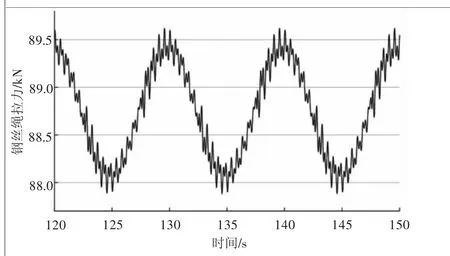
圖3 最大鉆柱下補(bǔ)償效果
2 樣機(jī)試制
2.1 關(guān)鍵結(jié)構(gòu)
絞車本體由兩臺交流變頻電動機(jī)驅(qū)動,通過兩檔齒輪減速箱驅(qū)動滾筒軸總成,絞車主剎車采用液壓盤式剎車裝置,輔剎采用能耗制動。
絞車滾筒體采用兩瓣式結(jié)構(gòu),槽體為兩瓣式槽體,與滾筒體的筒體組焊為一個整體。絞車滾筒為開槽滾筒,槽體上開有LEBUS繩槽,可有效地減少或避免絞車鉆井及補(bǔ)償過程中亂繩現(xiàn)象。

圖4 主動升沉補(bǔ)償絞車
絞車減速箱采用兩級齒輪傳動減速箱,齒輪的加工精度高,輸入轉(zhuǎn)速高,輸入額定轉(zhuǎn)矩大,能夠承受海洋升沉補(bǔ)償工況下周期性正反轉(zhuǎn),可以滿足中等沖擊要求。
2.2 試驗(yàn)方案
該主動升沉補(bǔ)償絞車的功能試驗(yàn)在試驗(yàn)臺架上進(jìn)行,試驗(yàn)采用反向試驗(yàn)法,即井架及試驗(yàn)臺相對靜止,通過電控系統(tǒng)輸入升沉特性參數(shù)來模擬實(shí)際海洋波浪的升沉特性,控制絞車針對給定的波浪升沉特性曲線進(jìn)行補(bǔ)償跟隨響應(yīng),將大鉤的實(shí)際位移與給定特性曲線的位移進(jìn)行對比,控制其精度,從而達(dá)到試驗(yàn)的效果。
2.3 試驗(yàn)裝置
升沉補(bǔ)償絞車的試驗(yàn)設(shè)備主要包括絞車本體、電氣控制系統(tǒng)、試驗(yàn)工裝、配重設(shè)備等。試驗(yàn)工裝主要包括37 m井架高度的鉆機(jī)綜合設(shè)備試驗(yàn)臺、天車、游車、提升鋼絲繩等游吊系統(tǒng),連接架總成、配重固定支架、配重塊、死繩固定器、電控房、柴油發(fā)電機(jī)組等。升沉補(bǔ)償絞車通過配重壓緊裝置固定在試驗(yàn)臺旁,從而模擬絞車在鉆機(jī)鉆臺面上的安裝;利用工裝柴油發(fā)電機(jī)組、氣源裝置、工裝電控系統(tǒng)作為系統(tǒng)調(diào)試、功能試驗(yàn)的動力源;在游吊系統(tǒng)下懸掛配重模擬鉆井現(xiàn)場的鉆柱載荷,通過施加不同噸位的載荷來滿足不同試驗(yàn)項(xiàng)目的要求。

圖5 補(bǔ)償絞車功能試驗(yàn)裝置

圖6 補(bǔ)償絞車功能試驗(yàn)裝置現(xiàn)場
2.4 試驗(yàn)
根據(jù)補(bǔ)償絞車系統(tǒng)的特性和試驗(yàn)臺架的承載特性,在試驗(yàn)臺架上分別測試在100 kN、300 kN和500 kN載荷下補(bǔ)償絞車的補(bǔ)償性能,電控系統(tǒng)分別在不同載荷下輸入10 s周期,0.75 m、1 m和1.35 m振幅特性曲線,測試補(bǔ)償絞車在不同載荷和不同特性曲線下的跟隨響應(yīng)特性。
在給定載荷和給定特性曲線條件下,電控系統(tǒng)控制絞車進(jìn)入補(bǔ)償工況,控制系統(tǒng)將檢測到的大鉤速度和位移進(jìn)行運(yùn)算,并生成曲線,通過與給定的位移曲線進(jìn)行對比,計算出試驗(yàn)工況下的補(bǔ)償精度。
升沉補(bǔ)償絞車完成了各載荷工況下的補(bǔ)償試驗(yàn),可實(shí)現(xiàn)最大補(bǔ)償速度0.85 m/s,最大補(bǔ)償位移2.7 m,補(bǔ)償精度不低于90%,試驗(yàn)運(yùn)行狀態(tài)良好。

圖7 10 s周期1.5 m振幅響應(yīng)特性曲線(50 t)

圖8 10 s周期2 m振幅響應(yīng)特性曲線(50 t)

圖9 12 s周期2.7 m振幅響應(yīng)特性曲線(50 t)
3 結(jié)論
通過對補(bǔ)償絞車的補(bǔ)償原理、關(guān)鍵參數(shù)進(jìn)行計算,設(shè)計并研制了一種1000 hp主動鉆井升沉補(bǔ)償絞車,結(jié)合補(bǔ)償絞車的廠內(nèi)型式試驗(yàn),得出以下結(jié)論:1)通過1000 hp升沉補(bǔ)償絞車的研制,掌握了一套主動升沉補(bǔ)償絞車的設(shè)計制造方法;2)通過試驗(yàn)驗(yàn)證了設(shè)計計算方法、控制模型和控制策略的準(zhǔn)確性;3)補(bǔ)償絞車具備了海試條件,為后期補(bǔ)償絞車的工程化應(yīng)用奠定基礎(chǔ)。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
