駕駛機器人車輛的多模式切換控制?
2018-11-15 01:47:36吳俊,陳剛
汽車工程 2018年10期
吳 俊,陳 剛
(南京理工大學機械工程學院,南京 210094)
前言
無人駕駛機器人是在危險和惡劣的環境下代替人類駕駛員進行自動駕駛操縱的工業機器人。無人駕駛機器人車輛是自動駕駛車的一種,與一般自動駕駛車輛相比,其最大的優點在于無須對車輛進行任何改裝,駕駛機器人就能安裝到駕駛室,實現車輛的自動駕駛,且一種駕駛機器人能適用于多種類型車輛。國外主要有德國、美國、日本等幾個發達國家擁有該項技術。國內掌握該項技術的主要有東南大學、南京理工大學、南京汽車研究所、中國汽車技術研究中心等高校和研究機構[1-4]。利用無人駕駛機器人進行車輛試驗獲得的結果比人類駕駛員獲得的結果更為精確、可靠,并可將普通車輛變為自動駕駛車輛。另外,無人駕駛機器人車輛可代替戰士和武警官兵駕駛車輛,應用于部隊運輸、戰場救援、疑兵偽裝、駕車掃雷等軍用領域,以及抗洪搶險、火災救援、地震救災和泥石流救援等警用領域。
駕駛機器人關鍵技術是對目標車速和軌跡的跟蹤[5]。根據車輛跟蹤目標工況的誤差將跟蹤過程分為車速誤差大軌跡側向誤差小、車速誤差小軌跡側向誤差小、車速誤差大軌跡側向誤差大、車速誤差小軌跡側向誤差大4種模式。對于多個模式的控制情況,專家和學者提出了多模式控制方法[6-7]。基于此,本文中提出了無人駕駛機器人車輛多模式切換控制方法來跟蹤車速與軌跡。
陳剛等[8]利用模糊自適應PID控制方法解決了車速跟蹤中調節參數的在線整定問題,但在車速誤差較大時難以快速減小。Bang-Bang控制為解決這一問題提供了新思路,但單純Bang-Bang控制輸出值會上下波動,平穩性較差[9]。結合模糊 PID和Bang-Bang控制設計的模糊 PID/模糊 PID+Bang-Bang車速切換控制器,不僅控制精度高、穩定性好,而且控制響應快。
熊波等[10]運用分級模糊控制算法對車輛軌跡進行跟蹤,但控制方法存在滯后性。張立廣等[11]采用結合補償控制的模糊PID跟蹤算法控制轉向,一定程度上解決了滯后性問題,但在軌跡側向誤差突然變大時仍需改進。相比于補償控制,預瞄理論能更好地解決軌跡跟蹤的滯后性。針對急轉彎等情況,Bang-Bang控制能快速減小軌跡跟蹤誤差。因此,提出了基于虛擬軌跡規劃的模糊PID/模糊PID+Bang-Bang轉向切換控制方法來跟蹤軌跡,有效地解決控制的滯后性,同時提高了控制的響應速度。
本文中提出了一種無人駕駛機器人車輛多模式切換控制方法。建立了駕駛機器人加速、制動機械腿和轉向機械手運動學模型和車輛動力學模型,設計了加速/制動機械腿切換控制器、模糊PID/模糊PID+Bang-Bang車速切換控制器和模糊PID/模糊PID+Bang-Bang轉向切換控制器,實現了駕駛機器人對車輛加速、制動和轉向的協調控制,最終實現了對車速與軌跡的精確跟蹤。
1 系統結構
駕駛機器人結構如圖1所示,主要由離合/制動/加速機械腿、換擋/轉向機械手、驅動電機及控制系統組成。加速、制動和離合機械腿能操縱各種車型的加速、制動和離合踏板。換擋機械手既能完成手動擋車型的換擋任務,也能完成自動擋車型的擋位變換。由于自動擋車輛基本在D擋行駛,所以文中沒有考慮其換擋模型。
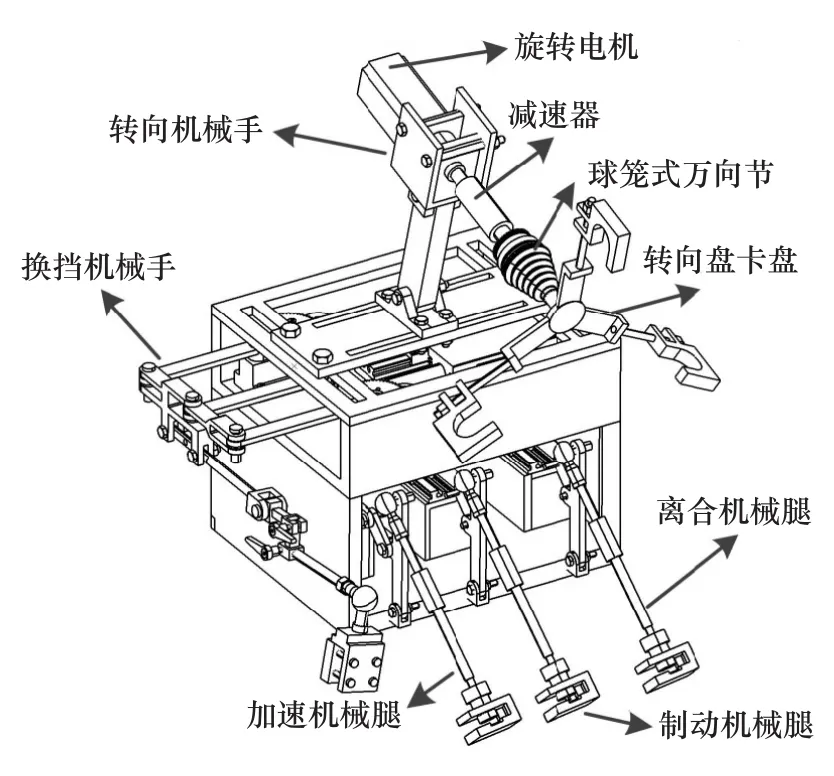
圖1 駕駛機器人結構
2 駕駛機器人車輛模型
2.1 車輛動力學模型
汽車在平路上行駛主要受力包括驅動力、制動力、滾動阻力、空氣阻力和加速阻力。加速和制動時車輛動力學模型為
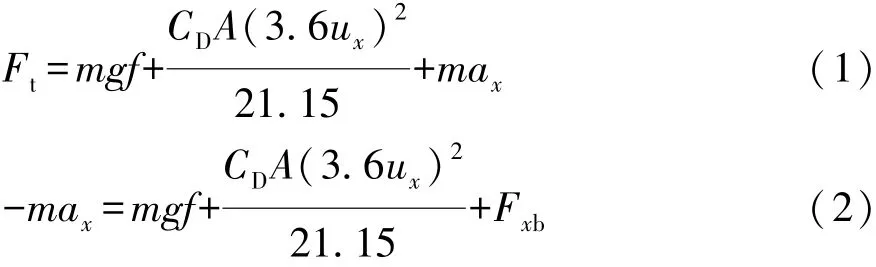
式中:m為車輛總質量;f為滾阻系數;CD為空阻系數;A為迎風面積;ux和ax分別為縱向車速和加速度;Ft和Fxb分別為驅動力和地面制動力。
車輛橫向動力學模型采用2自由度車輛模型,其狀態空間方程為
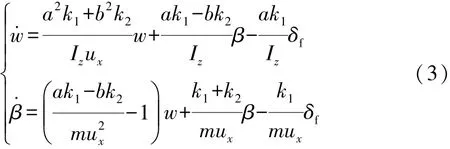
式中:w為車輛橫擺角速度;β為車輛質心側偏角;Iz為車輛繞z軸轉動慣量;k1,k2分別為前后輪側偏剛度;δf為前輪轉角;a,b分別為前后車軸到質心的距離。
2.2 轉向機械手運動學模型
轉向機械手旋轉電機產生轉角θm,經減速器、球籠式萬向節和轉向盤卡盤傳到轉向盤的轉角為θs,從而產生前輪轉角δf。將轉向機械手的傳遞函數A1(s)簡化為低階環節,即

式中:T1為時間常數,表示轉向響應的快慢;k為轉向角增益。
2.3 駕駛機械腿運動學模型
加速機械腿與制動機械腿采用相同結構,因此只須分析其中一種。駕駛機械腿運動學模型如圖2(a)所示。其中,汽車踏板簡化為搖桿l5,駕駛機械腿與踏板連接處為旋轉副,并將圖2(a)模型分解為圖2(b)的左半部分和右半部分。
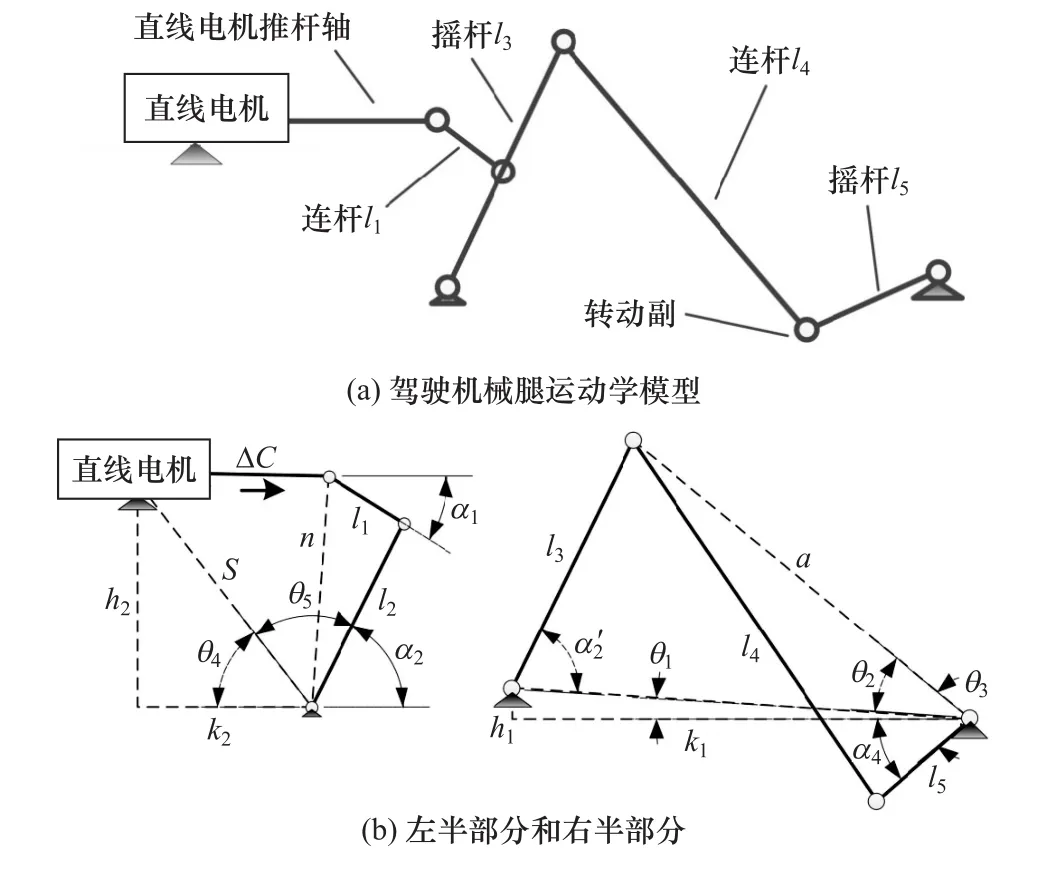
圖2 駕駛機械腿運動學模型
運用D-H法建立駕駛機械腿運動學模型較復雜。此處利用駕駛機械腿各桿長度和桿間角度的關系,得出電機輸出位移ΔC和α4的關系,即
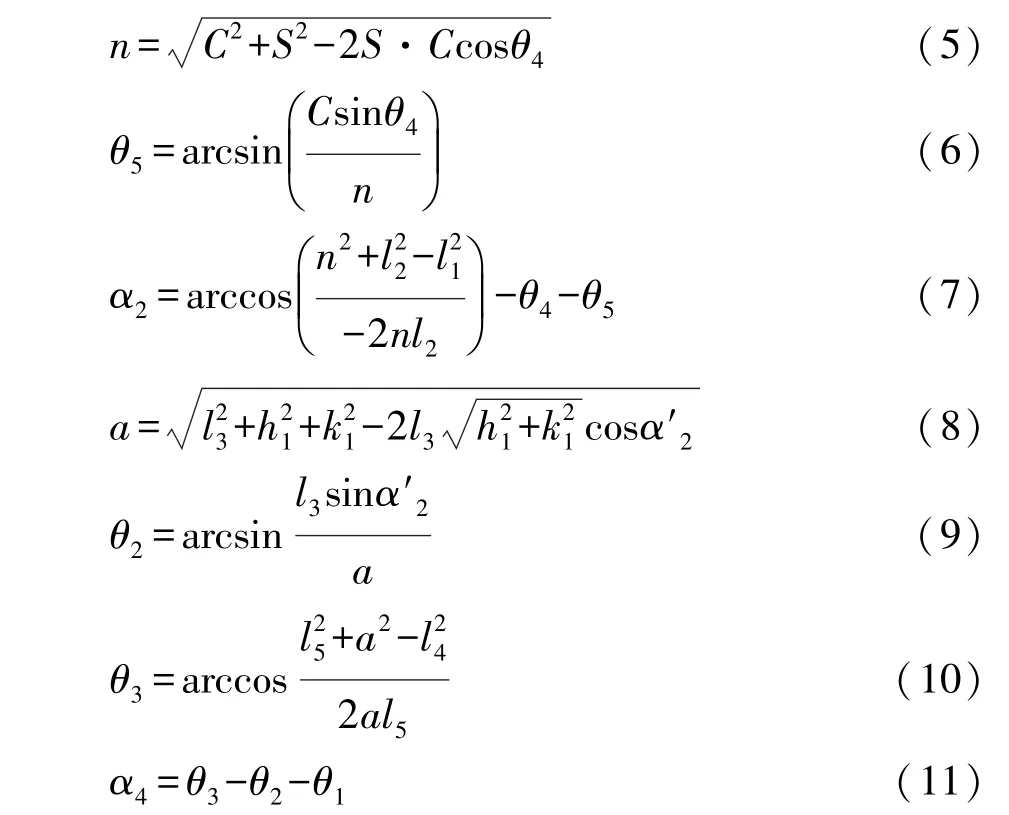
式中:h1,k1,h2,k2,S,θ1,θ4均為已知的駕駛機器人安裝參數;C為直線電機推桿軸總長,ΔC=C-C0,C0為初始時刻直線電機推桿軸長度;l1~l4為機械腿結構尺寸,l2從l3中分離出來,為 l3的1/2;l5為踏板模型長度;α4為踏板與水平線夾角。
由式(5)~式(11)所述的各變量之間的關系,可以推得ΔC和α4之間的關系,即f(ΔC)=α4。
2.4 駕駛機械腿產生的驅動力和制動力
加速機械腿直線電機輸出位移ΔC,使α4變化,從而產生節氣門開度αt。節氣門開度αt和驅動力Ft的關系為

式中:τ為發動機時間常數;kα為節氣門開度與驅動力的比例系數;αt為節氣門開度。在αt和Ft間增加一低階環節A2(s)來表示加速遲滯現象。該低階環節分析與轉向機械手類似。
對裝有鼓式制動器的車輛,制動機械腿直線電機輸出位移ΔC,使α4變化,繼而產生制動主缸活塞位移xz和制動輪缸活塞位移xl。制動主缸活塞位移xz與輸入力Fin的關系為
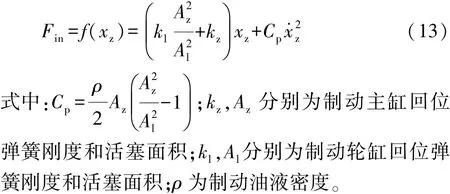
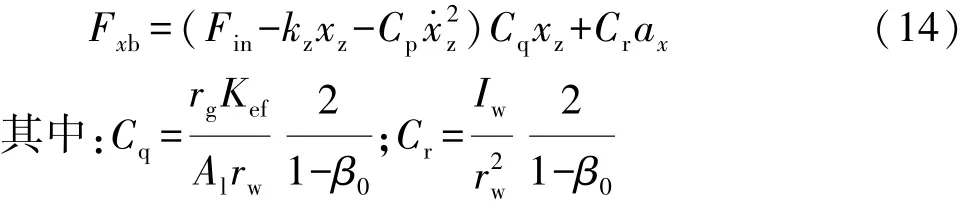
式中:rw和rg分別為車輪和制動鼓半徑;Iw為車輪轉動慣量;Kef為制動效能因素;β0為制動器制動力分配系數。kl和 Al的乘積數值上等于輪缸推力Fpu。

圖3 駕駛機器人車輛多模式切換控制系統
3 多模式切換控制方法
駕駛機器人車輛多模式切換控制系統框圖如圖3所示,主要由車輛模型、理想橫擺角加速度產生模塊、加速/制動機械腿切換控制器、模糊 PID/模糊PID+Bang-Bang車速切換控制器和模糊PID/模糊PID+Bang-Bang轉向切換控制器組成。其中,車速切換控制器以車速誤差eu為模式決策和模糊PID控制器的輸入,輸出駕駛機械腿直線電機位移ΔC2和ΔC3。轉向切換控制器以軌跡側向誤差Δye為模式決策,以當前時刻與下一控制時刻的橫擺角速度之差εw·d為模糊PID控制器輸入,輸出旋轉電機轉角 θm。
3.1 理想橫擺角加速度
在車輛當前位置與預瞄點之間實時規劃一條逼近目標軌跡的虛擬軌跡,可將軌跡跟蹤轉換為對下一控制時刻橫擺角速度的跟蹤[12]。
車輛坐標系轉換見圖4,OXY為大地坐標系,OCX1Y1為車輛局部坐標系。在坐標系OXY中,車輛質心坐標為(XC,YC,φC),預瞄點 OP坐標為(XP,YP,φP),φC和φP分別為車輛在OC和OP處時,車輛縱軸線與大地坐標系橫坐標的夾角。坐標系OCX1Y1中 OP坐標(xe,ye,φe)為
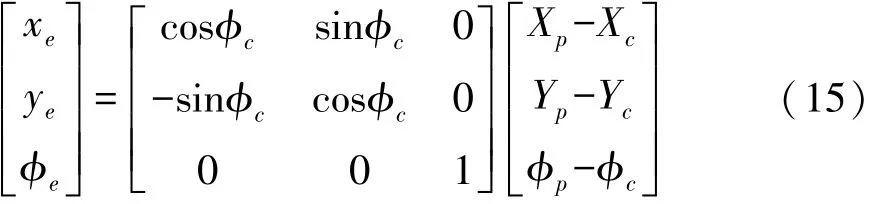
式中:xe為預瞄距離;ye為坐標系OCX1Y1中車輛當前位置與預瞄點側向偏差;φe為方位偏差。坐標系OCX1Y1中,實時規劃虛線軌跡方程為

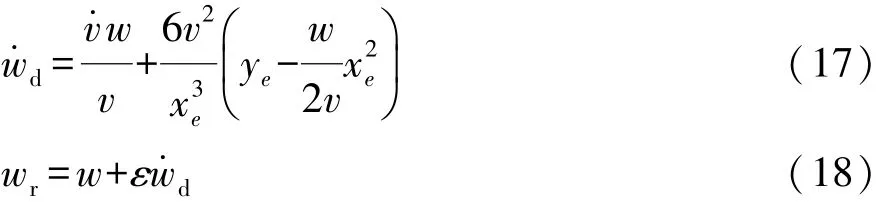
式中:w,v分別為當前車輛質心橫擺角速度和車速。繼而可得車輛沿此虛擬軌跡行駛時,當前橫擺角加速度和下一控制時刻的橫擺角速度wr:
產生的地面總制動力Fxb為
式中ε為與控制的間隔時間相關的比例系數。
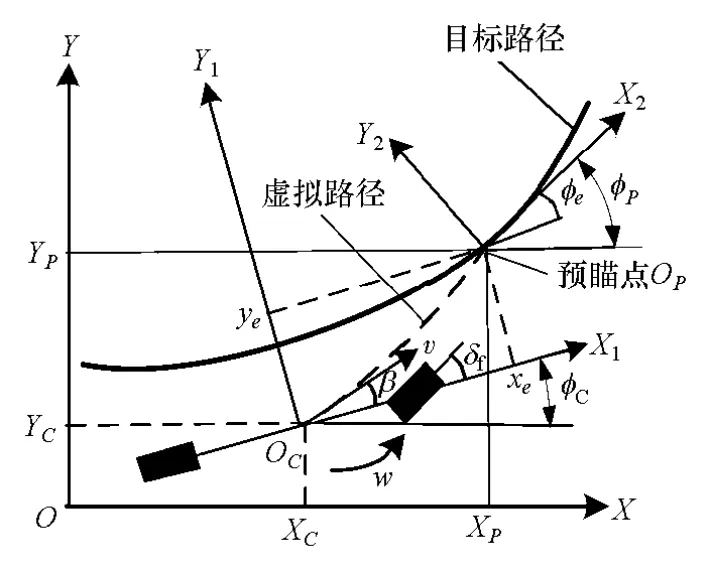
圖4 車輛坐標系轉換
3.2 加速/制動機械腿切換控制器
一般情況下,加速踏板與制動不同時作用,因此駕駛機器人加速機械腿和制動機械腿控制可設計成切換式,其切換規則設計為:當ar(t)-a0≥h時,加速機械腿控制;當ar(t)-a0<h時,制動機械腿控制。其中:ar(t)為目標車輛加速度;a0為節氣門全閉時,汽車在平路上由發動機拖動轉矩、滾動阻力和空氣阻力產生的減速度,取-0.20m/s2;h為控制緩沖值,取0.005m/s2。
3.3 模糊PID控制器
模糊PID控制器不斷檢測誤差e和誤差變化率ec,根據模糊推理在線修改調節量 Δkp,Δki和Δkd。 變量 e,ec,Δkp,Δki和 Δkd的模糊論域均設為{-6,-4,-2,0,2,4,6},模糊子集均為{NB,NM,NS,ZO,PS,PM,PB},并用量化因子將模糊論域分別調節到與車速誤差與橫擺角速度誤差相適應的范圍。變量采用的隸屬度函數如圖5所示。模糊PID控制器的模糊控制規則在已有專家經驗[8]的基礎上進行修正建立。由于車速與轉向控制中,模糊推理對調節量Δkp,Δki和Δkd的在線修正具有相似性,故轉向機械手和加速/制動機械腿的模糊PID控制器采用相同的模糊控制規則,如表1~表3所示。文中采用Zadeh模糊邏輯進行and操作,并采用質心法去模糊化。
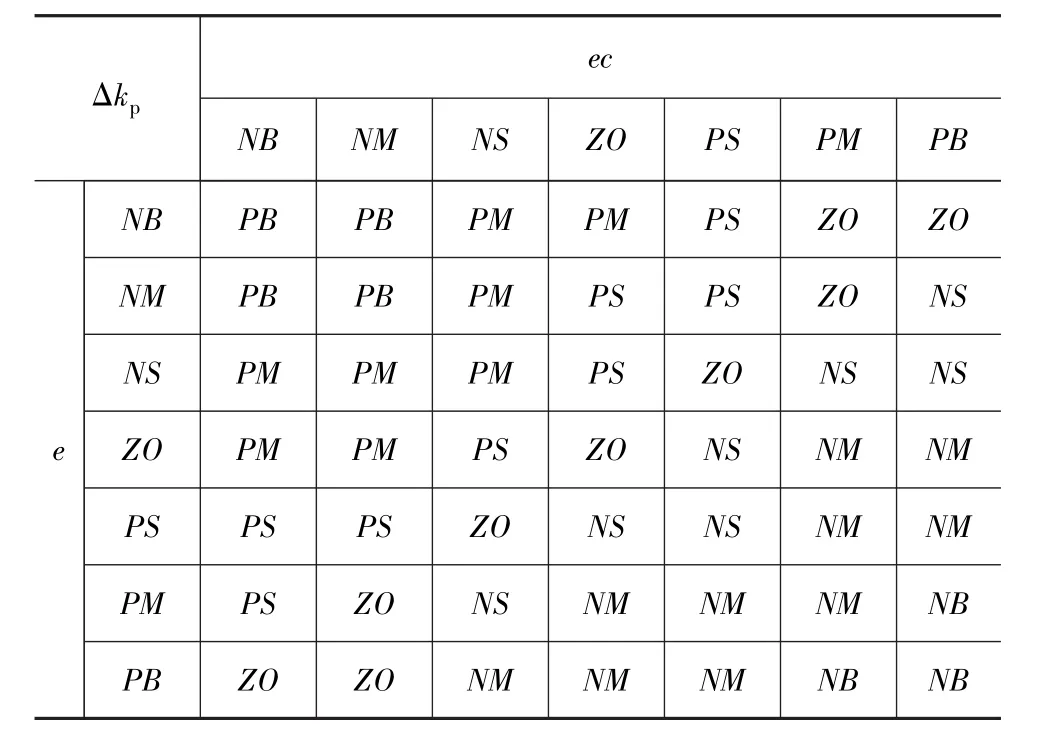
表1 Δk p的模糊規則
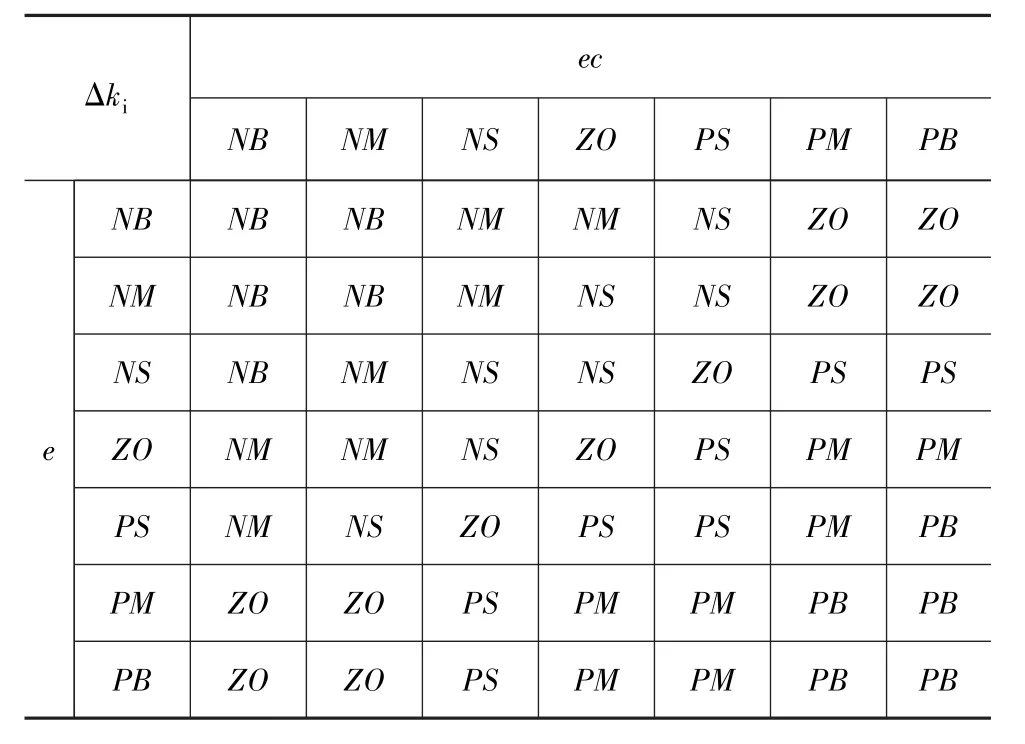
表2 Δk i的模糊規則
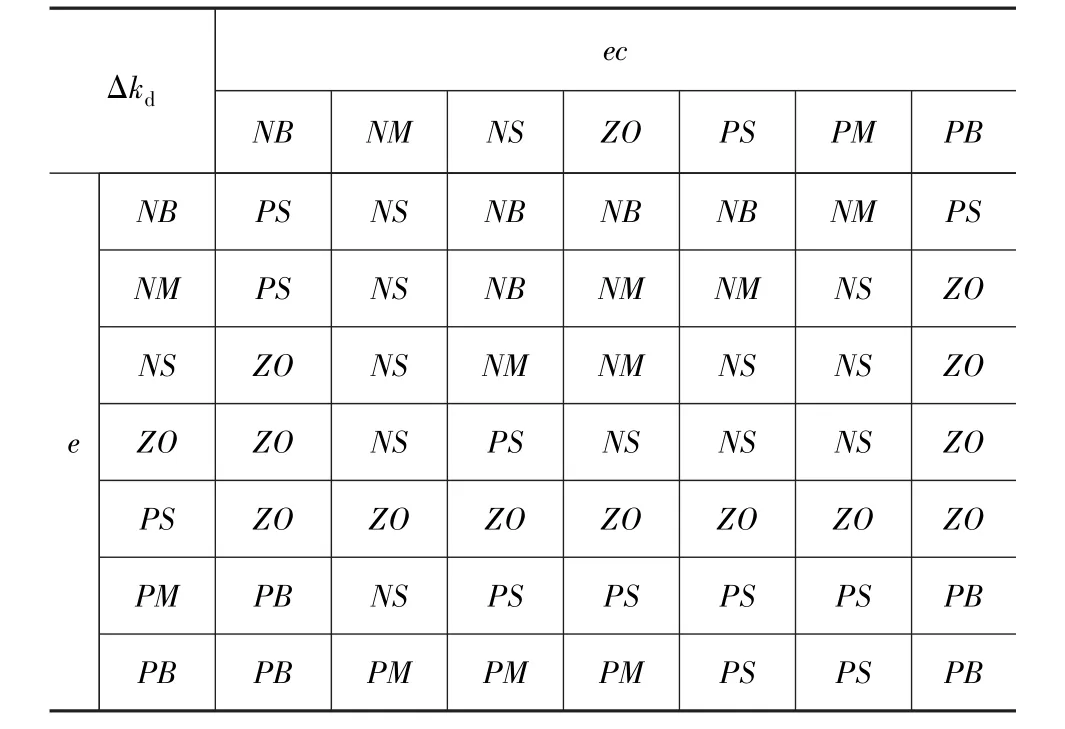
表3 Δk d的模糊規則
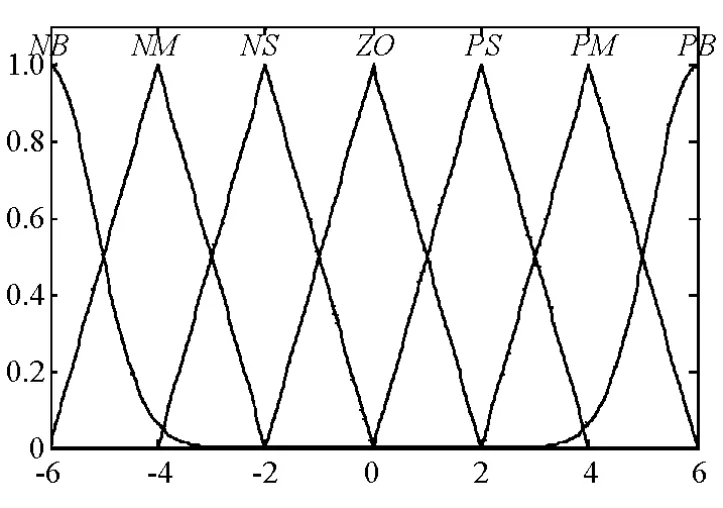
圖5 隸屬度函數
3.4 Bang-Bang控制器與多模式切換控制規則
模糊PID控制器始終參與系統控制,只有Bang-Bang控制器存在開閉間的切換。Bang-Bang控制器的控制規則為

式中:uk為控制器的輸出值;umax和umin分別為控制器輸出的最大正值和最大負值;ek為模式決策的輸入;Ek為模式決策的臨界值。
模式劃分示意圖見圖6,車輛跟蹤多模式由4種模式組成:①車速誤差大軌跡側向誤差小;②車速誤差小軌跡側向誤差小;③車速誤差大軌跡側向誤差大;④車速誤差小軌跡側向誤差大。
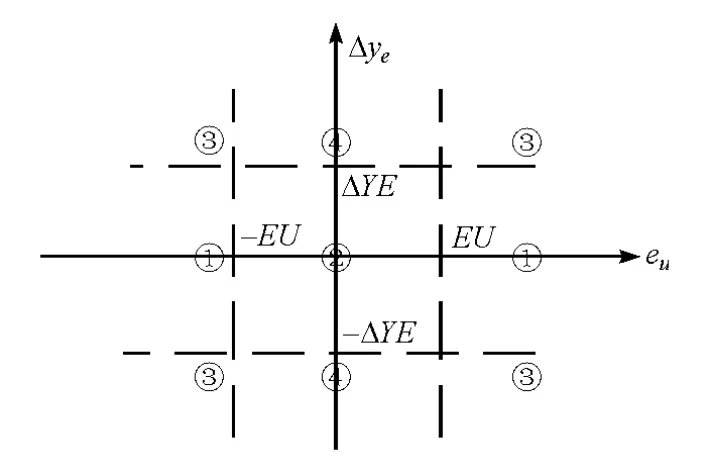
圖6 模式劃分示意圖
結合Bang-Bang控制器的控制規則,多模式切換控制規則為
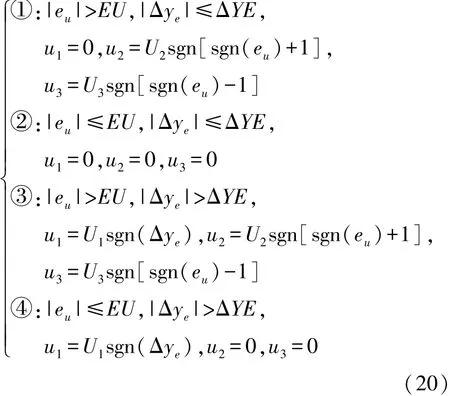
式中:eu和Δye分別為車速誤差和軌跡側向誤差;EU和ΔYE分別為車速和轉向的模式決策臨界值;u1,u2和u3分別為轉向機械手、加速和制動機械腿Bang-Bang控制器輸出;U1,U2和 U3分別為 Bang-Bang控制器輸出相關值。
4 仿真與試驗驗證
為驗證該方法的有效性,進行了仿真和試驗。仿真在Matlab/Simulink上進行,采用本文方法和模糊PID方法分別控制駕駛機器人車輛完成排放耐久性試驗的車速跟蹤仿真和雙移線仿真。試驗包括PID控制駕駛機器人車輛和人類駕駛員車輛的底盤測功機排放耐久性試驗和雙移線試驗。駕駛機器人車輛試驗根據相關標準[13],在BOCO NJ 150/80型底盤測功機上由駕駛機器人對長安悅翔自動擋轎車進行長時間的排放耐久性試驗,部分試驗現場見圖7。人類駕駛員車輛的排放耐久性試驗參見文獻[14],記錄車速變化。由于駕駛機器人車輛未安裝定位裝置,故目前無法利用駕駛機器人完成雙移線試驗。根據相關文獻[15],在交通部公路交通試驗場由人類駕駛員對桑塔納某型號轎車進行雙移線試驗。試驗中,由駕駛員操縱車輛,2名試驗員隨車實時采集測試數據。部分關鍵仿真參數如表4所示。

圖7 駕駛機器人車輛進行排放耐久性試驗
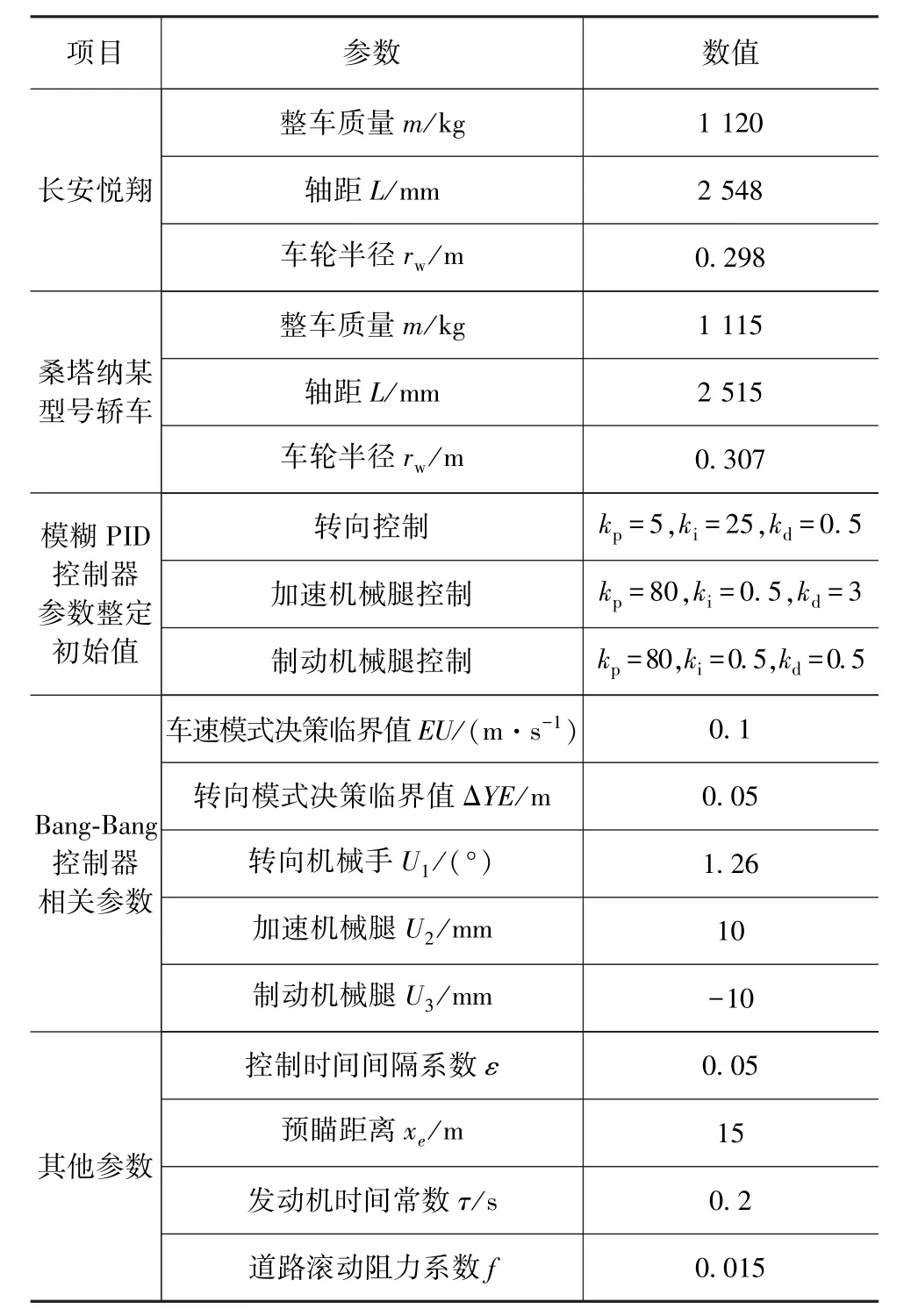
表4 關鍵仿真參數
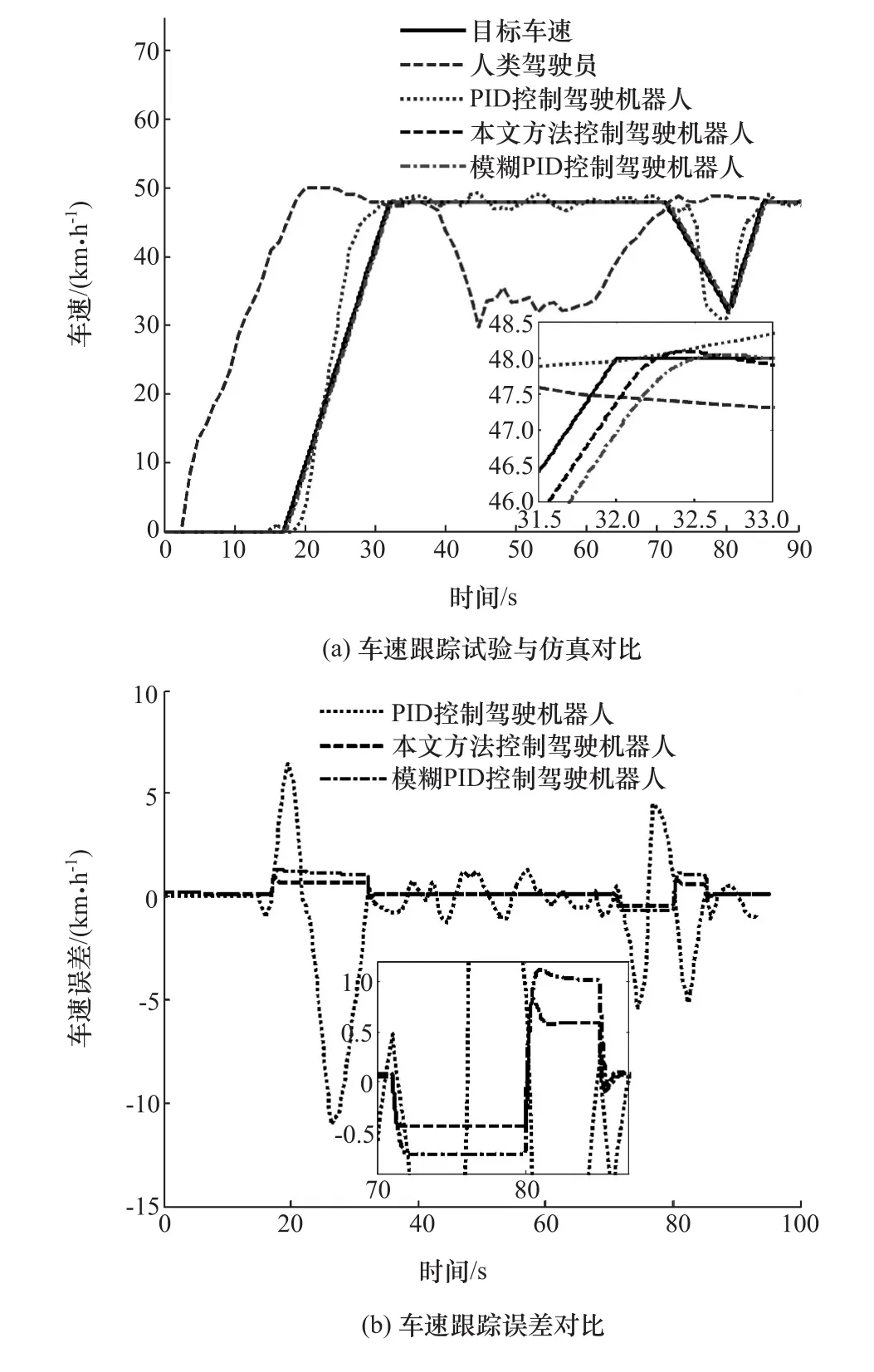
圖8 0~48km/h的車速跟蹤試驗與仿真曲線對比
圖9 為車速在50km/h時雙移線試驗與仿真曲線對比,包括人類駕駛員車輛試驗曲線、本文方法和模糊PID分別控制駕駛機器人車輛仿真曲線。由圖9(a)可見,試驗與仿真曲線的變化趨勢基本吻合,表明了本文方法的合理性。人類駕駛員操縱車輛進行試驗得到的試驗誤差較大,尤其在X=40m的彎道之后,這是因為人類駕駛員由于心理和反應滯后因素,很難精確跟蹤彎道軌跡。由圖9(b)可見,除X=40,75,120,155m 4處之外,本文方法比模糊 PID 控制精度高,將軌跡側向誤差控制在±0.05m內。因X=40,75,120,155m 4處為預設雙移線軌跡的折線拐角,故該4處的側向誤差很小,且兩種方法幾乎一樣。
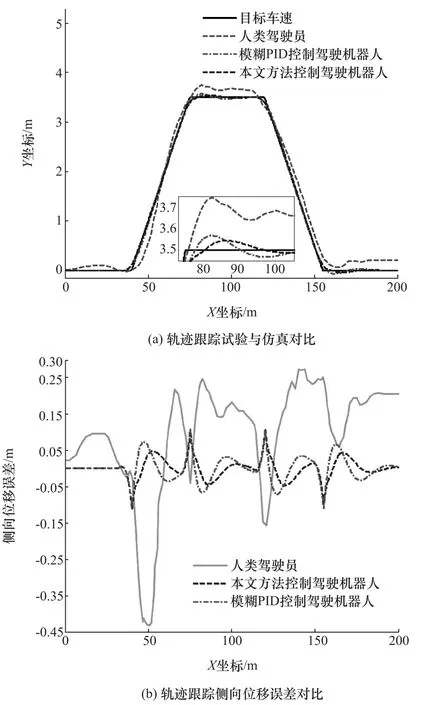
圖9 50km/h的雙移線工況下軌跡跟蹤試驗與仿真對比曲線
5 結論
提出一種無人駕駛機器人車輛多模式切換控制方法。建立了駕駛機器人加速、制動機械腿運動學模型、轉向機械手運動學模型和車輛縱橫向動力學模型,并設計了模糊PID/模糊PID+Bang-Bang車速
圖8為0~48km/h排放耐久性試驗與仿真曲線對比。由圖8(a)可見,人類駕駛員完成車速跟蹤的結果很不理想。這是因為長時間跟蹤車速循環工況,人類駕駛員會產生身心疲勞,很難把握每個工況循環的開始時刻,且車速波動大。PID控制駕駛機器人比人類駕駛員得到的試驗結果要好,但仍沒有達到試驗要求。采用本文方法與模糊PID方法的車速跟蹤仿真跟蹤誤差較小,在±2km/h以內,均滿足試驗要求。但采用該方法控制,當跟蹤誤差超過切換臨界值時,Bang-Bang控制的加入使跟蹤誤差快速減小(圖8(b)局部放大圖),從而得到比模糊PID控制更精確的結果。切換控制器、模糊PID/模糊PID+Bang-Bang轉向切換控制器和加速/制動機械腿切換控制器,并進行了仿真與試驗驗證。
車速跟蹤試驗與仿真表明了本文方法能在模糊PID穩定跟蹤控制的基礎上,進一步將車速誤差快速減小到±1km/h以內,滿足車速跟蹤試驗要求。人類駕駛員雙移線試驗與本文方法仿真曲線變化趨勢基本吻合,表明了該方法能實時在車輛當前位置與預瞄點之間規劃一條虛擬軌跡,合理地跟蹤下一控制時刻的橫擺角速度,在模糊PID穩定跟蹤的基礎上,能利用Bang-Bang控制進一步快速減小軌跡側向誤差。
今后將考慮無人駕駛機器人車輛模型簡化帶來的誤差,對本文中提出的控制系統穩定性進行理論證明,解決控制方法在車速和轉向控制的實時性問題,并進行駕駛機器人車輛室外道路的試驗研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
電腦報(2020年35期)2020-09-17 13:25:53
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49