超聲測距測速系統的設計及應用
2018-11-22 10:51:50楊鑫玙喻秋山季偉馳
物理實驗 2018年11期
楊鑫玙,喻秋山,季偉馳,胡 蘇
(長江大學 物理與光電工程學院,湖北 荊州 434023)
隨著經濟的快速發展,社會車輛的保有量和交通安全事故絕對數量都呈明顯上升趨勢,給人民的生命和財產安全帶來了嚴重威脅. 為此人們采取了多種措施來降低這種風險,典型的如研制防碰撞預警安全系統[1-3]. 這類系統常基于激光或雷達波為載體進行設計,具有精度高、監測范圍大等優點,但價格昂貴、操作復雜等不足嚴重阻滯了該類系統的普及與推廣[4-6]. 據統計[7],很多場合下行車安全預警應用中對車輛的實時測速和測距精度要求并不高. 因此,操作簡便、測量精度適中、性價比高的經濟型自動測距測速預警裝置將有廣闊的市場應用空間. 本文以AT89C52為核心,以超聲波為載體,設計出超聲波測距測速預警安全行車系統,該系統將具有結構簡單、經濟、實用性強等特點.
1 實驗設計原理
由20 kHz以上的電脈沖驅動壓電陶瓷片換能器發射的聲波稱為超聲波[8]. 超聲波因其頻率高、波長短在空氣中傳播時有近似直線傳播的特點,遇到障礙物時能產生明顯的反射,且在傳播過程中對人體的視覺和聲覺不產生干擾. 基于此特性,可將超聲波作為無接觸測距和測速系統的信號載體.
由單片機產生40 kHz的方波脈沖串,經功率放大后驅動陶瓷換能器發出超聲波,以聲速u在空氣中定向傳播. 當超聲波遇到障礙物時,在其表面將有部分能量被反射回超聲接收器. 若此往返過程中超聲波耗時Δt,則波源與被測物間距離s為
(1)
超聲波作為縱波,其波速u易受環境溫度影響[9],在干燥空氣中有
u=331.3+0.606θ,
(2)
式中,θ為攝氏溫標. 15 ℃時,聲速約340.4 m/s.
若被測物與波源位置發生相對移動,在時間間隔ΔT內先后2次測量出不同時刻波源與障礙物之間的間距s1和s2,則波源與被測物間的相對位置移動速率v為
(3)
基于上述分析,測試中若能測量出超聲波在空氣中的傳播速度u、往返障礙物的回波時間間隔Δt及2個不同時刻的時間間隔ΔT,就可完成測距和測速.
2 系統電路設計
2.1 系統誤差分析
根據前述測距測速原理分析,傳播速度u、回波時間Δt及不同時刻的時間間隔ΔT是影響測距和測速的關鍵因素. 為提高測量的準確性,對測量系統誤差來源作如下分析,通過策略優化以期提高系統的測量精度.
2.1.1 測定回波時間Δt的影響因素及減小誤差的方法
為提高電路的抗干擾性和測量的可靠性,測量系統在實際應用中常采用發射固定頻率的多個超聲波脈沖串作為信號載體. 在定向發射超聲波信號后,在實際傳播過程中常由于受到空氣中的粉塵、水汽、反射物間距及反射截面的大小、形貌等因素影響,其回波信號強度在不同條件下有明顯的強弱變化[10]. 若接收電路的信號觸發比較器的電壓閾值為定值,第1個回波信號常不能過零觸發(回波信號波形如圖1所示). 回波信號經檢波后,其包絡線的上升沿具有按指數規律上升的特征[8-10],信號峰強大約在第4個波峰可達極大值,而在第3個波峰時可達極值的75%,故實際應用中常設第2個回波作為系統計時停止的觸發信號. 但這樣一來,所測時間將比實際用時多出2個脈沖周期,造成回波時間偏大. 為提高系統測量精度,如何精準確定第1個回波脈沖沿的到達時間將是問題解決的關鍵.
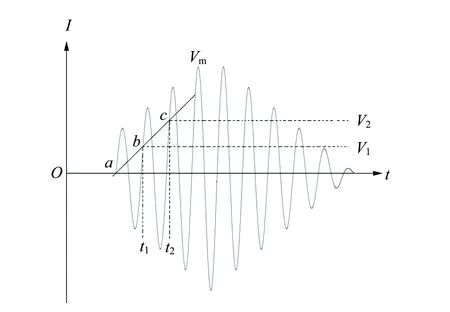
圖1 超聲波接收器的回波信號波形變化示意圖
由于超聲波在空氣中傳播時存在介質吸收衰減和發散性能量損失,聲強與傳播距離呈指數衰減,造成在量程范圍內不同間距的被測物體回波振幅相差甚大,若用固定閾值的單比較器檢測則可能導致觸發時刻隨信號強弱產生漂移,導致計時不準. 為解決此問題,擬采用以四運放芯片TL074為核心構建回波信號放大、整形的雙閾值比較電路,可精準確定第1個回波脈沖沿的位置. 如圖1所示,設V1和V2分別為雙閾值比較器的2個門限電壓(V2>V1,且由實驗值設定),Vm為峰值電壓. 當超聲波發射頭開始工作時,單片機內置的2個定時器T1和T0同時開始計時,回波信號觸發比較器1翻轉時,T0停止計時,得T0計時t1;當比較器2翻轉時,T1將停止計時,得T1的計時t2. 顯然t2>t1,設t是第1個回波前沿所對應的傳播時間, 則有
(4)
有
(5)
顯然,使用雙比較器所獲得的計時t作為回波測量時間將比t2或t1精確度要高.
2.1.2 超聲波發射器發散角的影響
由于換能器振子呈面形結構[圖2(a)],及超聲波自身具有波動特性,使得超聲波在實際傳播中并不呈線狀,而是呈如圖2(b)所示的錐面.

(a)實物圖
(b)超聲波錐形發散角示意圖 圖2 超聲波傳感器實物與發散角示意圖
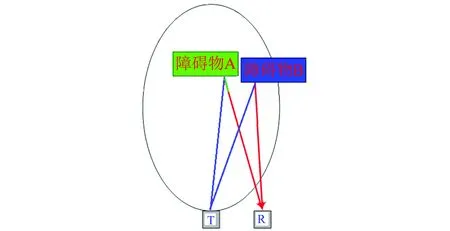
若波陣面前方的反射物A和B處于與波源T等距的位置,但回波到接收頭R處時其距離將有所不同,導致產生測量偏差. 要想提高測量精度,可采用減少發散角和提高發射頻率、提高反射面平整度等方法. 圖2(a)中超聲波傳感器的外圓筒有減少發散角的功效,而選用40 kHz的脈沖頻率較20 kHz的脈沖有更佳的線性傳播特性.
2.1.3 測量環境對測量精度的影響
超聲波在空氣中傳播需借助空氣介質進行能量傳遞,但溫度對超聲波在空氣中的傳播速度有較大的影響. 如0 ℃時,超聲波在空氣中的傳播速度為313.3 m/s,而到35 ℃時則變為334.5 m/s,其改變量達6.7%,故需通過式(2)進行波速溫度補償修正.
2.1.4 盲區的影響
系統測速時,為避免發射端的脈沖串對鄰近的接收端產生串擾,接收端須等待信號發送完畢才能啟動接收. 另外,超聲波換能器的晶振有一定慣性,即外加脈沖電場結束后晶振并不能立即停止,而是有“受迫振動—平衡振動—阻尼振動—振動消失”的過程. 過程中,發射端在脈沖電場消失后仍然可產生若干疊加在回波信號上的余振信號,使得接收電路鑒別不出真正的回波信號,干擾了系統對第1個回波信號的準確捕捉. 因此,回波信號的捕捉需在余振徹底消失以后才能啟動. 基于上述原因,換能器的晶振特點限制了超聲波傳感器的測量范圍,即存在測量盲區[5]. 在技術上可通過減小脈沖寬度來減少盲區的出現,但另一方面卻限制了測量距離的范圍,如何平衡兩者之間的關系是設計中需要考慮的重要問題.
2.2 系統硬件構成
超聲波測距測速系統基本組成結構如圖3所示. 系統以AT89C52單片機主體,輔以鍵盤輸入模塊、超聲波發射/接收模塊、聲光報警模塊、顯示模塊和溫度檢測電路等部分組成.
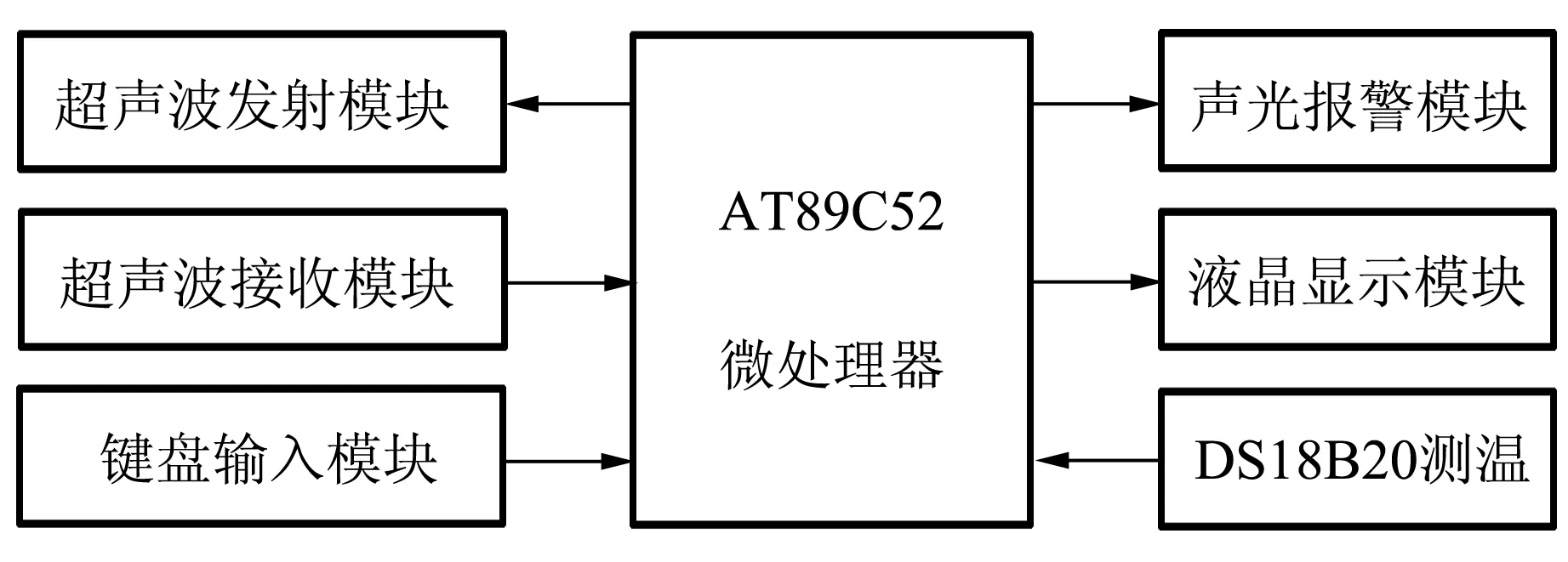
圖3 系統組成結構圖
2.2.1 AT89C52處理器及系統接口電路
AT89C52是由Atmel 公司生產的低功耗、高性能CMOS 8位微處理器,擁有8K可編程Flash 存儲器,256字節RAM,32 位I/O 口線和3個16位定時器/計數器等組件,可滿足實驗所需各項資源.
2.2.2 超聲波接收與發射模塊的設計
超聲波的發射/接收模塊以臺灣義隆電子生產的EM78單片機為核心,實現對信號的處理與動作控制;以ST202芯片及外圍電路組成超聲波電平驅動發射電路;以四運放芯片TL074及外圍電路組成前置放大與雙比較器整形電路. 該部分電路原理如圖4所示.
電路的工作時序波形如圖5所示. 由單片機的定時器發送控制信號TRIG,且每隔周期T′就產生一持續時間為T′的40 kHz方波串脈沖,經ST202芯片及外圍電路進行電平變換后驅動超聲波發射. 考慮到回波時長限制,T′的大小設置與系統預設的最大測量距離有關. 如測量距離設為5 m,聲速按常溫時346.5 m/s計算,則T′至少為28.9 ms,再考慮盲區等因素,系統設置T′常在50 ms以上. 回波時長以TRIG發出控制脈沖時開始計時,由定時器對系統內部時鐘進行計數;一旦回波ECHO產生下降沿跳變,定時器T1則停止計數. 根據計數值,算出T的大小,即為超聲波發送到接收的時間差.
2.2.3 溫度測量與整體電路的設計
將溫度傳感器DS18B20實時檢測到的空氣溫度,代入式(2),經單片機AT89C52數據處理后即可得到波源與被測物的間距s1,完成測距;若連續測量2次相鄰時刻波源與障礙物之間的間距,并將間距的變化值Δs與時間間隔ΔT代入(3)式即可獲得相應的速度值.
系統整體電路圖如圖6所示,主要由AT89C52微處理器、1602LCD液晶顯示模塊及HC-SR04超聲波發射/接收模塊等構成,具有系統結構簡單、操作方便和經濟等特點.
在系統控制軟件的設計上,采用前臺和后臺程序相結合的方式. 其中,前臺程序負責發送TRIG信號和2次相鄰測距信號的時間差ΔT的計算. 后臺程序則負責系統的初始化控制、回波信號檢測,及時間差、速度和距離等的計算與顯示,其控制流程圖如圖7所示.
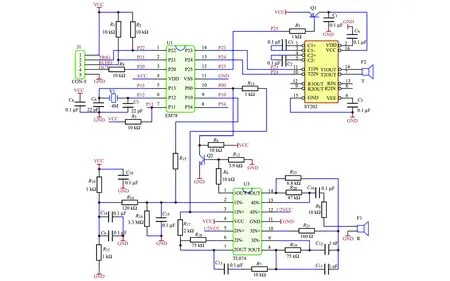
圖4 超聲波發射與接收系統結構電路圖
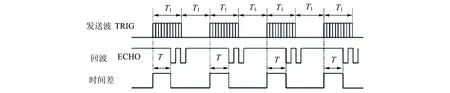
圖5 超聲波測距工作時序波形圖
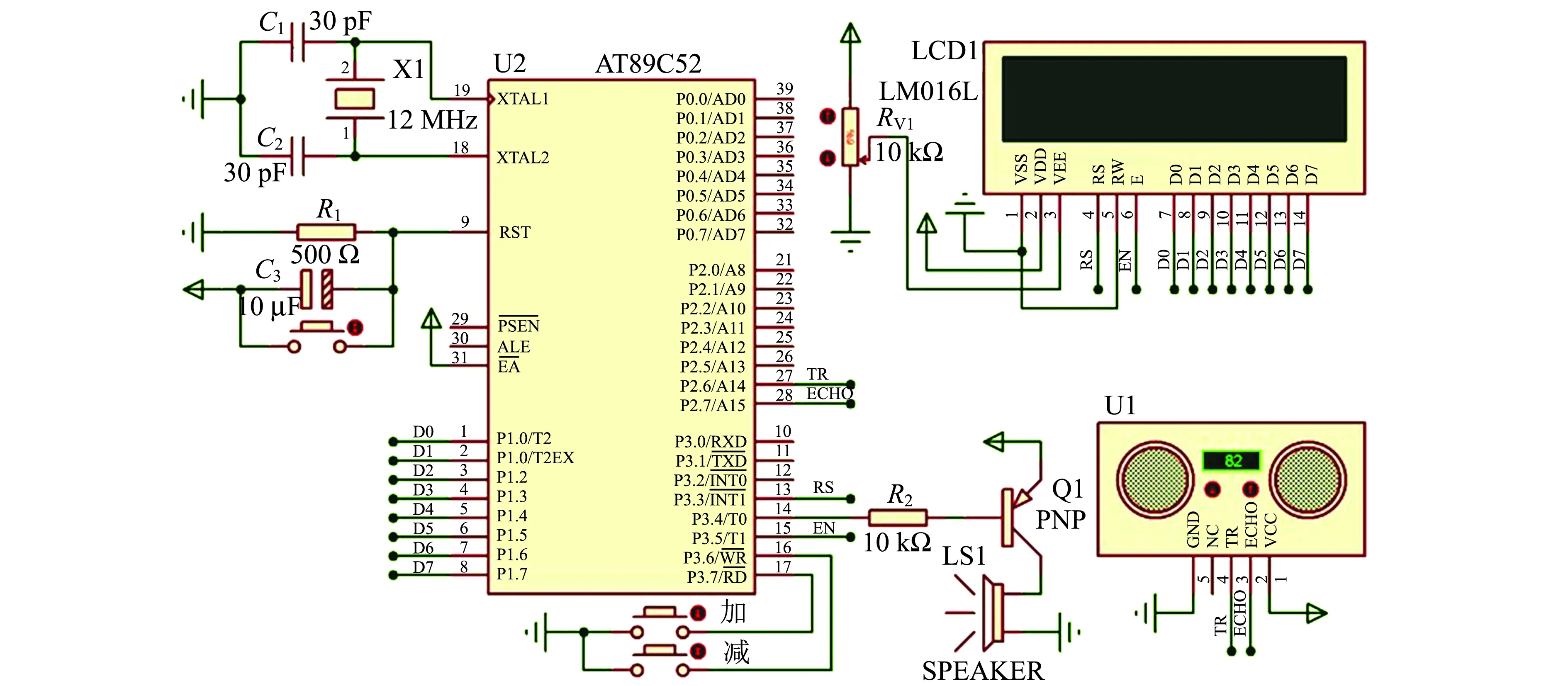
圖6 系統整體電路原理圖
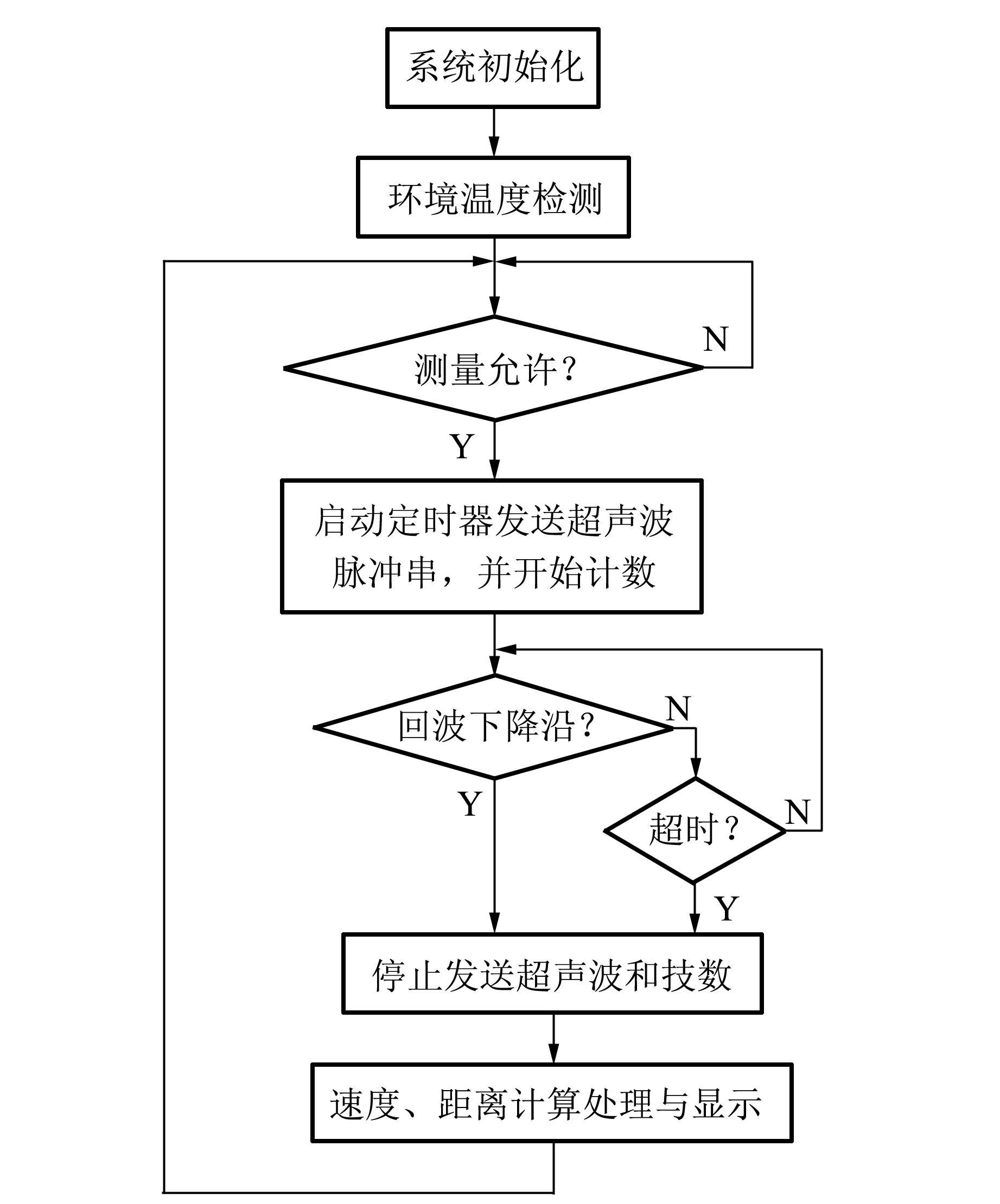
圖7 超聲測距測速系統處理流程示意圖
3 超聲波測距與測試裝置的實現與應用
將該系統設計進行實物制作,所得實物裝置如圖8所示. 對系統進行3次測距測試,數據取平均值列入表1中. 其中,當障礙物與波源的距離達到5 m時數據測量出現不穩定,在該點的3次測量中2次失敗. 而在0.02~4.5 m的測量范圍內,各測量值與真實值之間的誤差都在5%以內,表明該系統具有較高的測距準確性,能滿足預警裝置的測試精度要求,可將該功能單列作為測距儀使用,實現一機多用. 若將相鄰2次測距數據及采集的時間間隔數據作進一步處理,可獲得波源與障礙物之間的相對速度, 將數據與單片機內的預置數值進行閾值比較,可實現超限報警功能(實物設計中使用語音提示模塊發出預警信號),提醒駕駛員注意行車安全,可在一定程度上降低安全事故發生的風險.
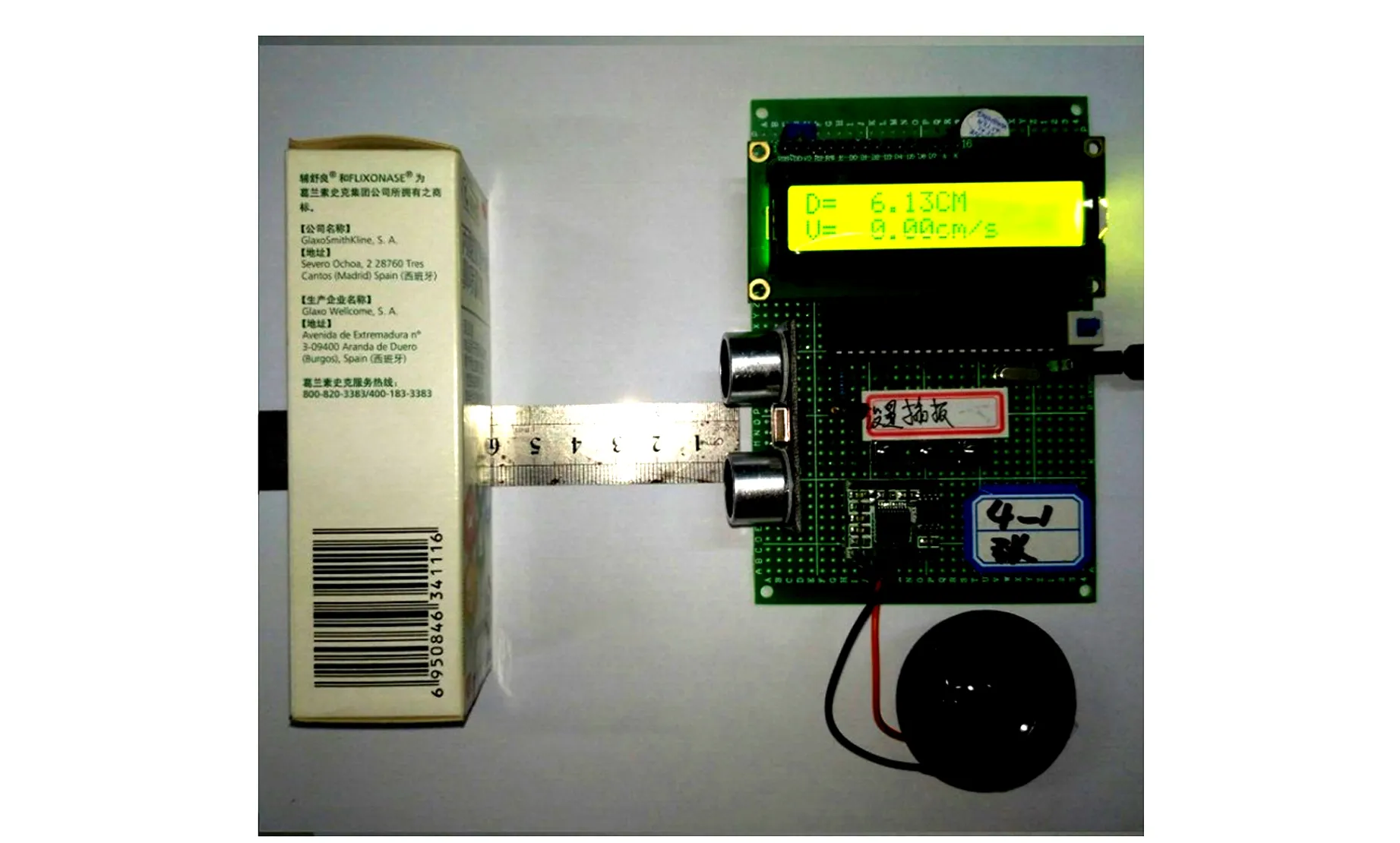
(a)測距實驗

(b)測距測速實驗圖8 超聲波測距測速系統實物圖
4 結束語
以AT89C52處理器為控制核心,完成了超聲波測距測速系統的設計與制作. 該系統引入了溫度補償模塊和優化設計了第1個回波信號檢測程序,可在簡單的硬件模塊下實現較高精度的測距測速功能,并通過內置閾值的方法實現了機動車輛安全預警功能,具有經濟和一機多用的優點,可廣泛應用于測距、測速、行車安全預警等多個領域.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21