基于非線性優劃的干道交通信號過渡模型研究
2018-11-28 09:24:08樊友定
交通運輸研究 2018年4期
樊友定,姚 佼,嚴 凌
(上海理工大學管理學院,上海 200093)
0 引言
從流量控制的角度來看,信號過渡通常被理解為從一個信號配時計劃轉換至另一個信號配時計劃的過程,以適應交通需求的變化。在傳統的干道協調控制系統中,信號控制方法通常是根據多時段當日時間(Time-of-day,TOD)或交通感應選擇控制來設定的。在這兩種情況下,信號過渡對干道協調控制交通流的連續性都有負面影響[1]。為了盡可能減小信號切換對車流的中斷或擾動,高效的信號過渡方法起到了不可忽視的作用[2]。
傳統過渡方法可分為兩大類。第1類過渡方法的目標在于使信號過渡持續時間最短。這類方法認為在過渡期間使用非最優控制參數會對交通運行產生破壞性影響,因此試圖通過最小化過渡期的持續時間來實現有效的交通運行。Lieberman等[3]提出了快速信號過渡算法,其本質上設計為最小化信號過渡周期的數量和過渡持續時間,然而該過渡方法只適合特定的交通狀況。樹愛兵等[4]提出了一種基于周期的交通信號協調控制過渡調整策略,能在1~2個周期內完成信號過渡。第2類過渡方法的目標在于使控制參數(如相位差或周期長度等)在過渡期間變化相對較小。這類方法的思路是逐漸過渡到新控制方案,使過渡期間的交通流擾動最小,然而逐漸過渡方法通常會增加車均延誤以及需要更多的過渡持續時間。Ross[5]建立網絡仿真模型中的交通仿真系統模型(Traffic Simulation System in Network Simulation Model,NETSIM)研究了過渡算法對不同流量條件下平均車速和平均停車次數的影響,并在達拉斯中央高速公路的臨街道路系統中進行了驗證。在類似的研究中,Basu[6]使用NETSIM和交通網絡研究工具模型(Traffic Network Study Tool,TRANSYT)研究了影響信號定時控制計劃數量的因素。一些學者研究發現,第2類過渡方法在某種程度上會與第1類使總體過渡時間最小化的方法產生沖突。
對傳統過渡方法的評價方面,Nelson等[7]使用硬件在環仿真系統中對干道緊急救援進行了影響分析。該研究采用了計劃過渡作為恢復算法,以便在救援終止后重新同步控制器。研究發現,平滑過渡算法使用20%和17%作為最大和最小的周期變化百分比在評估大多數場景下表現得最好,然而實際應用效益并不是很高,且代價高昂。Mussa等[8]利用漸變過渡和線性二次優化技術,將過渡問題建模為一個線性動態過程,尋求目標是協調參數偏差的平方和,例如過渡期間的周期長度和相位差。作者采用了線性二次優化技術來確定最佳轉換步數和最佳轉換步長。然而,此研究假設了擾動測量值是控制參數的偏差,而不是系統性能,如平均車輛延誤等。Shelby等[9],Obenberger等[10],Cohen等[11],Yun等[12]進行了特定交通網絡狀況下的交通軟件仿真分析,得出了相應的結論。栗紅強等[13]利用TSIS軟件中提出的3種過渡算法并以控制延誤作為評估指標,對早高峰前后2種過渡場景進行了研究,發現快速過渡相較平滑過渡具有優越性。盧凱等[14]提出了單周期對稱調節過渡和N周期加權調節過渡算法。郭海鋒等[15]以各交叉口相位差變化量最小為目標,提出了一種逐步減小新舊協調方案相位差變化量的快速平滑過渡方法。仿真對比分析顯示,該方法與傳統加法(Add)和減法(Subtract)過渡方法相比具有顯著優勢。以上學者的研究聚焦于特定交通條件下的過渡方法仿真和對傳統過渡方法的改進,雖然實驗數據多,但不具有普適性,并且未考慮過渡時期交叉口性能最優化。在已有的優化研究方面,劉慧[16]提出一種基于交通狀態預測模型的協調控制方案間的優化過渡方法,并通過VISSIM仿真與快速平滑過渡方法進行對比分析,然而預測模型誤差會使得過渡策略適得其反。鄭明明等[17]提出一種改進的經驗過渡方法,目標是減少在偏移校正和偏移上花費的時間,實驗結果證明了最短路徑(Shortest-Way)過渡方法優于CORSIM中的短路徑(Shortway)過渡方法。由此可見,現狀大量研究集中于對現有過渡方法的分析與評估,而不是研究如何提出最優過渡策略。
研究高效穩定的干道過渡策略,以避免傳統過渡方法對交通流的擾動、延誤以及增加停車次數等負面影響,有比較重要的理論意義和實際應用價值。本文研究了基于延誤最小化的信號過渡方法。在闡述本文過渡方法的基本策略的基礎上,建立基于非線性優化的過渡模型,并考慮車流離散因素。然后基于改進遺傳算法對模型進行求解,并對案例進行仿真,對不同過渡方法進行了對比分析和驗證。
1 非線性優化過渡模型
1.1 基本策略
本策略的主要思想在于盡量減少過渡期間的平均車輛延誤。因此,要對包括過渡步數和過渡周期步長在內的所有控制變量進行聯合優化。在約束搜索空間內,所提出的過渡方法對相位差、周期時長和綠信比進行同步調整。計劃過渡方法和傳統實時自適應控制算法分別只考慮周期時長和相位差的計算,忽略了過渡期間相位差與系統周期時長間的直接關系。換言之,相位差的逐步改變必須伴隨著背景周期時長的特定變化。此外,相對傳統過渡方法,本過渡策略放寬了在過渡期內對共同周期時長的要求,可以使過渡更流暢,同時減少不必要的次要道路延誤。總而言之,所提出的過渡方法的基本策略在于通過聯合約束優化同步調整相位差、周期時長和綠信比來使過渡期間交叉口車輛延誤最小。
1.2 模型公式
模型公式的目標函數為過渡期間每個交叉口的平均車輛延誤的總和。本文中,《公路容量手冊》(Highway Capacity Manual,HCM)[18]中的延遲方程被用來估算平均車輛延誤。延誤公式包括過渡時期周期時長、綠燈時間、相位差以及各個交叉口的飽和度。

式(1)中:D為車輛控制延誤(s);D1為假設車輛符合均勻到達情形的均勻延誤;Pf為均勻控制延誤的調整參數;D2為考慮車輛符合隨機到達情形以及過飽和排隊情況下的增加延誤(s);D3為考慮初始排隊情況的車輛初始排隊延誤(s)。
均勻延誤、增加延誤、初始排隊延誤計算公式如下:
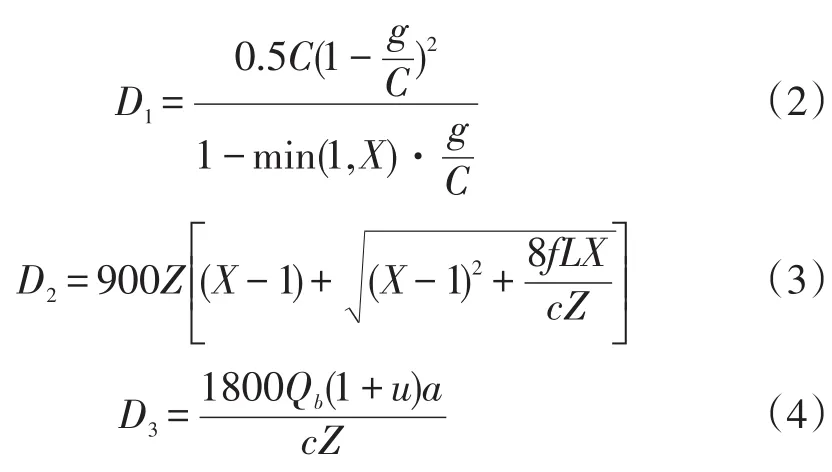
式(2)~式(4)中:g為綠燈時長(s);C為周期時長(s);X為交叉口相位關鍵車流的飽和度;Z為分析時長(s);f為感應控制的變化系數;L為增量延誤修正系數(上游交叉口由于車輛換道引起的);c為相位關鍵車流車道組的通行能力(pcu/h);Qb為車道初始排隊車輛數(pcu);u為排隊延誤系數;a為分析時長Z內需求大于通行能力的時間(s);其他參數含義同式(1)。
當然,準確估計下游交叉口的到達模式對于評估協調控制的控制效益至關重要。下游流量到達率是上游車流到達率、上游次要道路流量到達率、上游綠燈時長、下游綠燈時長、周期長度、相位差和路段行駛時間的函數。這個估計的綠燈車輛到達率用HCM公式計算綠信比。因此,在使目標函數最小的情況下,確定候選周期長度、相位差和綠信比。為了符合一般車輛運行規律,采用羅伯遜幾何分布來描述車流到達下游交叉口的分布,離散公式如下:
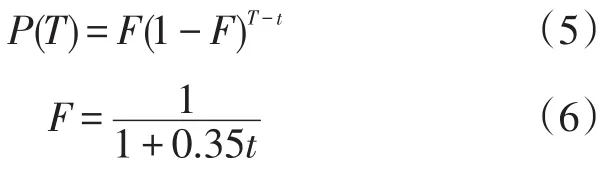
式(5)~式(6)中:P為交叉口之間不同車速行駛時間分布概率;T為交叉口之間行駛時間(s);t為交叉口之間最小行駛時間(s)。
上游交叉口與下游交叉口相位差期望值計算方法如下:

式(7)中:?i,i+1為相鄰交叉口相位差(s);Tm為不同行駛時間(s)。
由上游交叉口到達下游交叉口的車流到達率計算方法如下:

式(8)中:qi+1(b)為第b時段到達下游交叉口停車線斷面的車流率;qi(a)為第a時段駛離上游斷面的車流流率;P(b-a)為從上游停車線到達下游斷面行駛時間為b-a的概率分布函數。
式(7)和式(8)是求式(9)中自變量相位差與流量的方法。本文所提出的非線性優化過渡模型如下:
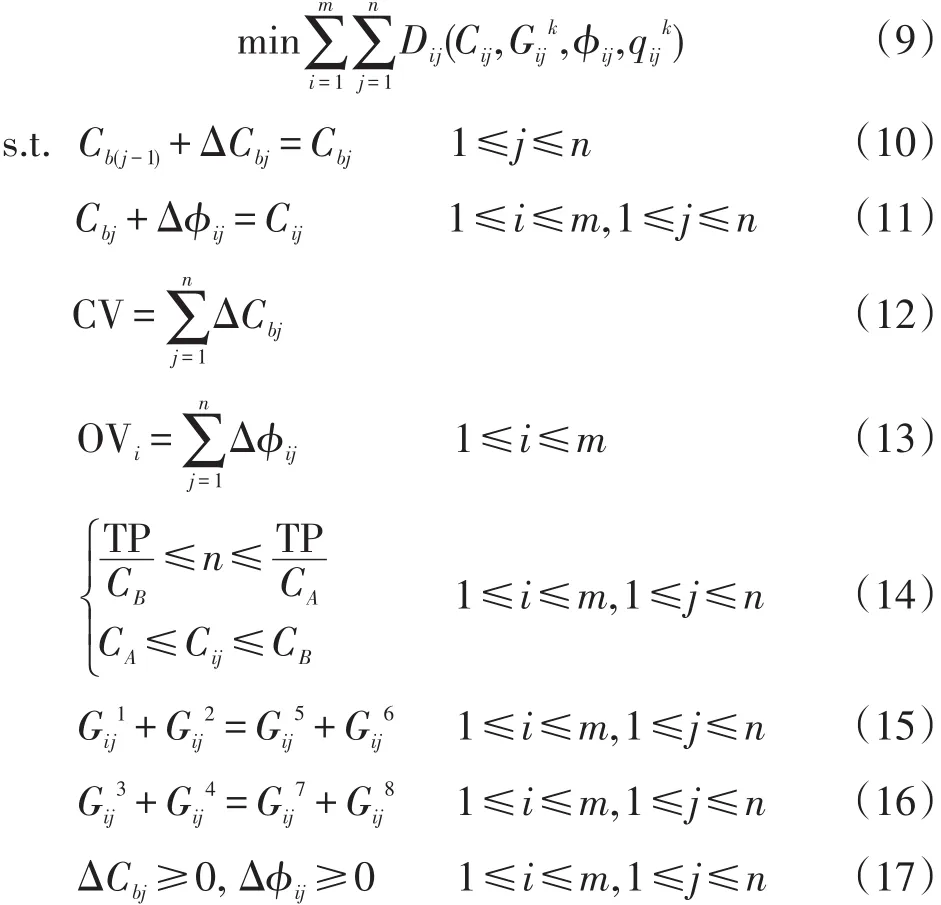
式(9)~式(17)中:i為第i交叉口;j為第j過渡步驟;k為第k相位;n為總過渡周期個數;m為干道協調交叉口總數;Cij為第i交叉口在第j過渡時期過渡周期時長(s);?ij為第i交叉口在第j過渡時期相位差(s);Gij k為第i交叉口在第j過渡時期第k相位的綠燈時長(s);qij k為第i交叉口在第j過渡時期第k相位的交通流量(pcu);Dij為第i交叉口在第j過渡時期的車均延誤(s);Cbj為第j過渡時期的背景周期時長(s);ΔCbj為第j過渡時期周期時長變化量(s);Δ?ij為第i交叉口在第j過渡時期相位差變化量(s);CA為信號定時計劃的當前周期長度(s);CB為信號定時計劃的下一個周期長度(s);CV為過渡期間周期時長變化總量(s);OVi為第i交叉口在過渡期間的交叉口相位差變化總量(s);TP為過渡總持續時間(s)。
本文所提出的過渡模型作為一個非線性優化模型,包括3個控制過渡過程的重要決策變量。第一個決策變量是過渡周期的個數n(即在過渡時期內需要多少個周期才能有效完成信號過渡)。第二個決策變量是過渡步長ΔCbj。這兩個變量用于計算背景周期時長Cbj,這是用于干道協調控制的常用周期長度。通過使用過渡周期個數和過渡步長,可以對協調干道進行逐步循環過渡,該協調干道由下面提出的模型公式的第一個約束方程建模。相位最小綠燈時長為用戶定義的約束,周期長度約束在優化模型中是隱含的。最后,第3個關鍵決策變量是在每個過渡步驟中每個交叉口調整的相位差變化量Δ?ij。因此,可以通過將相位差變化與背景周期時長相加來確定單個交叉口的周期時長,該背景周期時長計算方法是所提出的模型公式的第二約束方程(式(11))。式(12)和(13)是第三和第四個約束方程,分別表示在過渡時期的周期和相位差總變化的守恒性。此外,過渡周期的數量應通過過渡總持續時間TP和過渡期前后干道協調控制兩個背景周期時長(式(14))確定。為了更好地實現干道控制,在過渡期間每個交叉口進行獨立的相位差變化。因此,如果此結果對過渡模型目標函數有有利影響,則特定交叉口可能比其他交叉口更早完成自己的信號過渡。當前周期長度和相位差從相位差變化的約束值解碼并和流量以及綠色時間的約束值一同輸入車輛延誤目標函數。
1.3 算法求解
復雜和大規模的數學問題(如信號時序優化)的一個根本問題是如何有效地達到全局最優解(如果存在)或接近最優解。遺傳算法是求解這類復雜模型的一類頗具吸引力的算法。
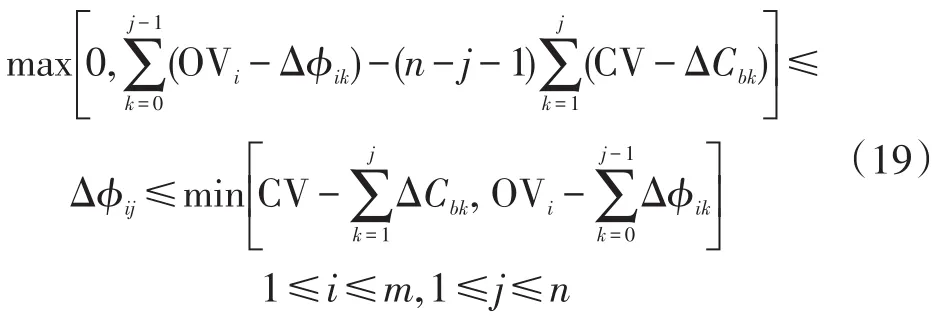
在過渡步驟j中,過渡周期應小于過渡總時長的剩余量。此外,在此過渡步驟中,應確定每個交叉口的最小相位差變化,因為過渡步驟中的交叉口周期長度應小于或等于模型公式中所述的新計劃周期時長。否則,通過在后面的過渡步驟中將過渡的相位差變化量添加到背景周期中,單個交叉點的周期時長可能大于新計劃周期時長。因此,應通過從過渡總時間的剩余量中減去相位差變化的最小量來決定最大步長。在這種情況下,應該從具有最大相位差殘差的交叉口中選擇相位差過渡的最小量,以便滿足此步驟中所有交叉口的周期時長約束。過渡步驟j處的周期變化的邊界如下:

可以由方程(19)確定過渡步驟j中交叉口i的相位差變化邊界。此步驟中的相位差變化量應小于或等于總相位差變化量的剩余量。此外,它應該滿足周期時長約束,因此它應該小于或等于周期時長變化總量的剩余量。另一方面,可以通過執行剩余步驟可用的最大相位差變化量確定此步驟中的最小相位差變化量。也就是說,最小相位差變化量等于總相位差變化量的剩余量減去殘余步長的最大相位差變化量。過渡步驟j中交叉口i的相位差變化邊界如下:
使用上述邊界條件,可以按下式進行周期變化和相位差變化的解碼處理:
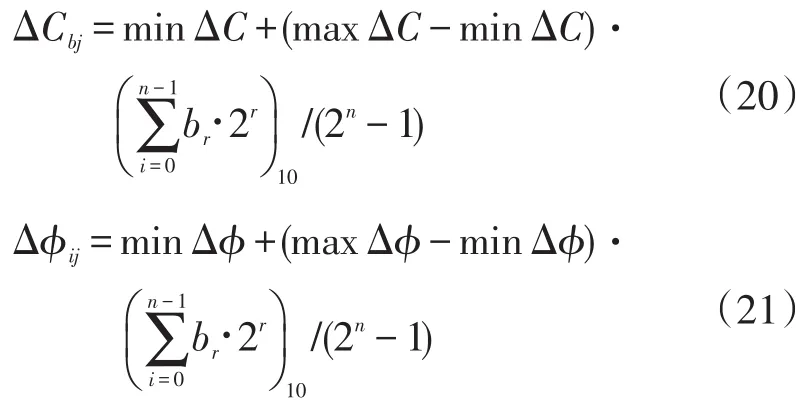
式(20)~式(21)中:minΔC為最小周期變化量(s);maxΔC為最大周期變化量(s); minΔ?為最小相位差變化量(s);maxΔ?為最大相位差變化量(s);n為二進制字符串中使用的位數;br為第r位數值(0或1)。
一旦通過上述解碼過程確定了周期變化和相位差變化量,就可以計算出各個交叉口的周期時長和相位差量,因為兩者都已經通過當前信號定時計劃已知,并且周期時長也用于計算相位綠信比,計算方法如下:
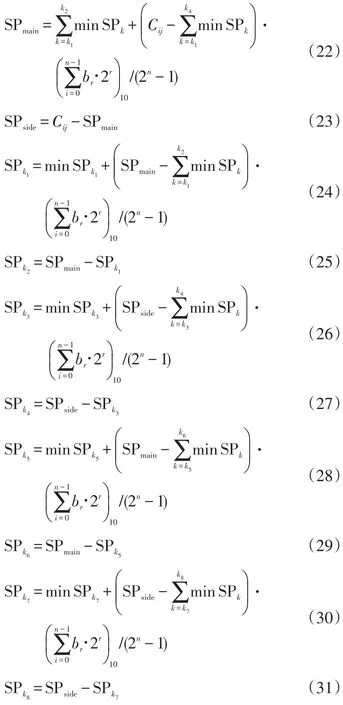
式(22)~式(31)中:Cij為第i交叉口在第j過渡時期過渡周期時長(s);SPmain為主要道路綠信比時間(s);SPside為次要道路綠信比時間(s);SPk為第k相位的分配時長,k=k1,k2,…,k8;minSPk為第k相位最小分配時長(s);n為二進制字符串中使用的位數;br為第r位數值(0或1)。
以相同的方式,通過使用上限和下限邊界條件簡單地進行相位綠信比的解碼。一旦通過上述解碼過程確定了控制參數,基于遺傳算法的優化模塊借助Matlab優化工具箱(Optimization Toolbox)求解HCM延遲等式,計算所選有機體的適應度。由于每個交叉口需要優化迭代的代數不同,有的收斂快,有的慢,為了使得每個交叉口計算優化時間一致且提高計算效率,所以遺傳算法不是建立收斂標準,而是在所有情況下運行100代。基于遺傳算法的優化過程中使用的控制參數如下:(1)適應度值:車均控制延誤;(2)種群規模:200;(3)選擇機制:二進制比賽選擇;(4)遺傳操作:均勻交叉;(5)交叉概率:0.75;(6)變異概率:0.03;(7)迭代代數:100。
2 案例分析
本文以常州市和平路沿線三交叉口(清涼路、光華路和吳中大道)干道協調控制為研究對象,交叉口間距分別為860m和400m,如圖1所示。過渡時段為平峰向高峰過渡,新舊方案配時計劃已根據流量進行了優化設計。為了體現過渡時期內車流變化的形式,本文采用3種不同流量增長模式來校驗模型,分別為線性、指數和對數流量輸入[19]。
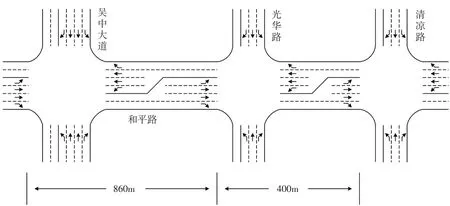
圖1 干道交叉口示意圖
仿真環境采用Visual C++調用VISSIM內部COM接口,對MATLAB求解方案進行仿真分析,并且與經典的兩周期、三周期等過渡方案進行對比分析。
現狀3個協調控制交叉口平峰時期與高峰時期公共周期分別為120s,140s。平峰時期清涼路、光華路和吳中大道相對背景交叉口相位差分別為:19s,85s,1s。高峰時期清涼路、光華路和吳中大道相對背景交叉口相位差分別為:48s,125s,29s。總相位差變化量分別為:29s,40s,28s。仿真時長取15min,仿真結果如表1~表3,圖2~圖4所示。
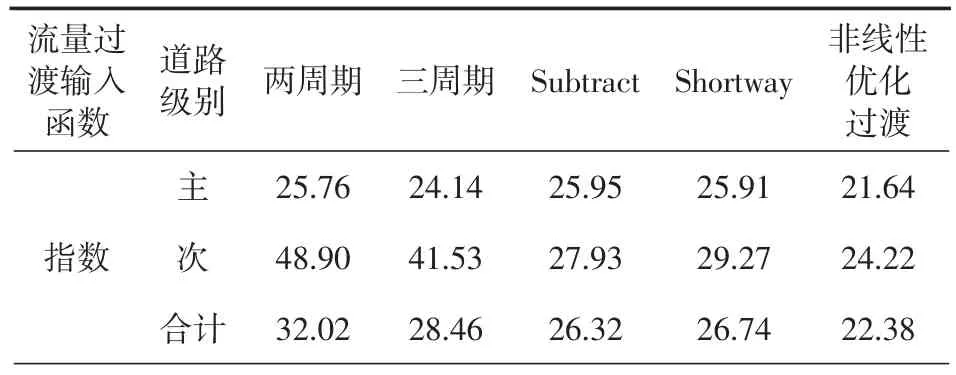
表1 和平路—吳中大道不同過渡方法車均延誤(單位:pcu/s)
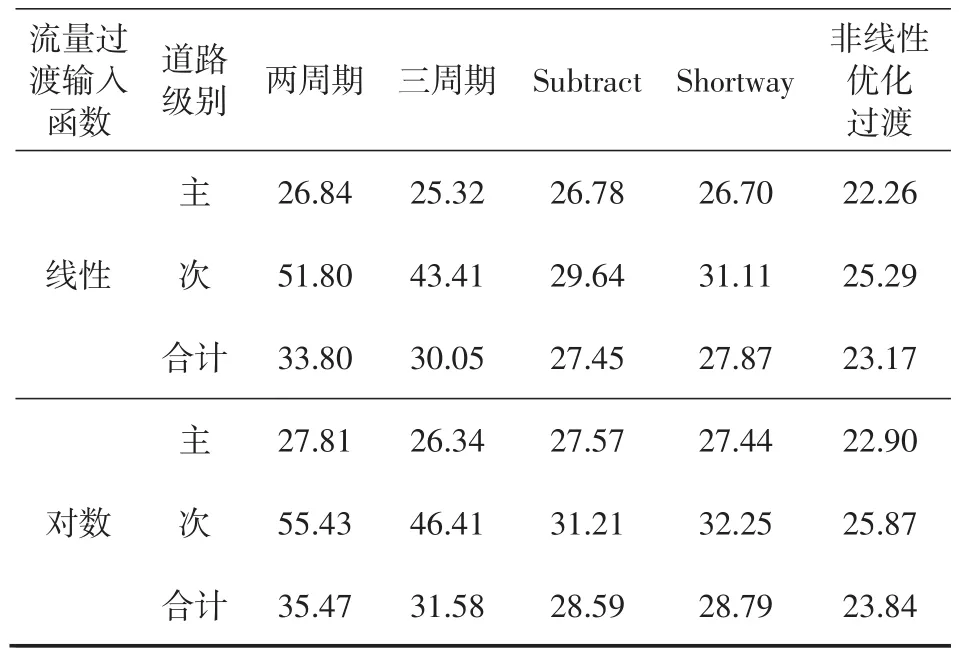
表1(續)

表2 和平路—光華路不同過渡方法車均延誤(單位:pcu/s)
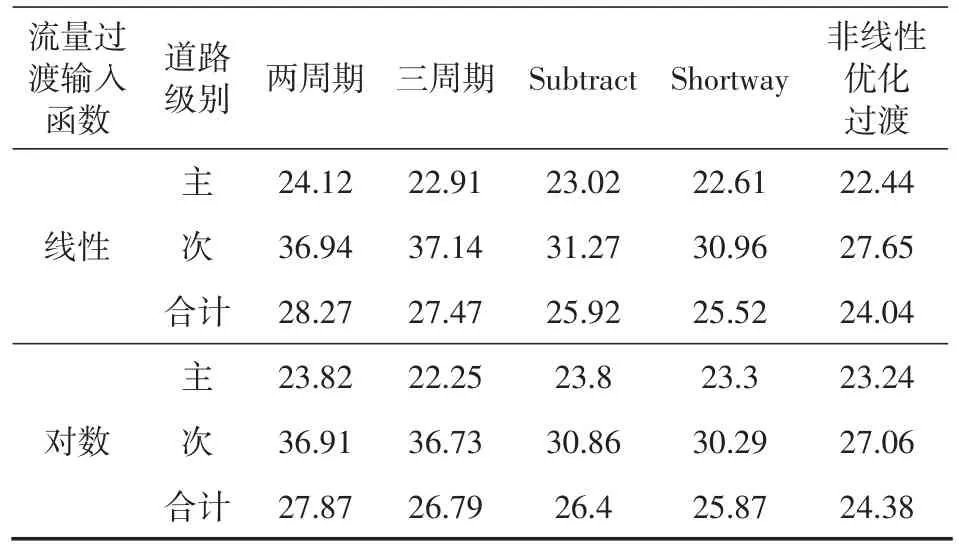
表2(續)
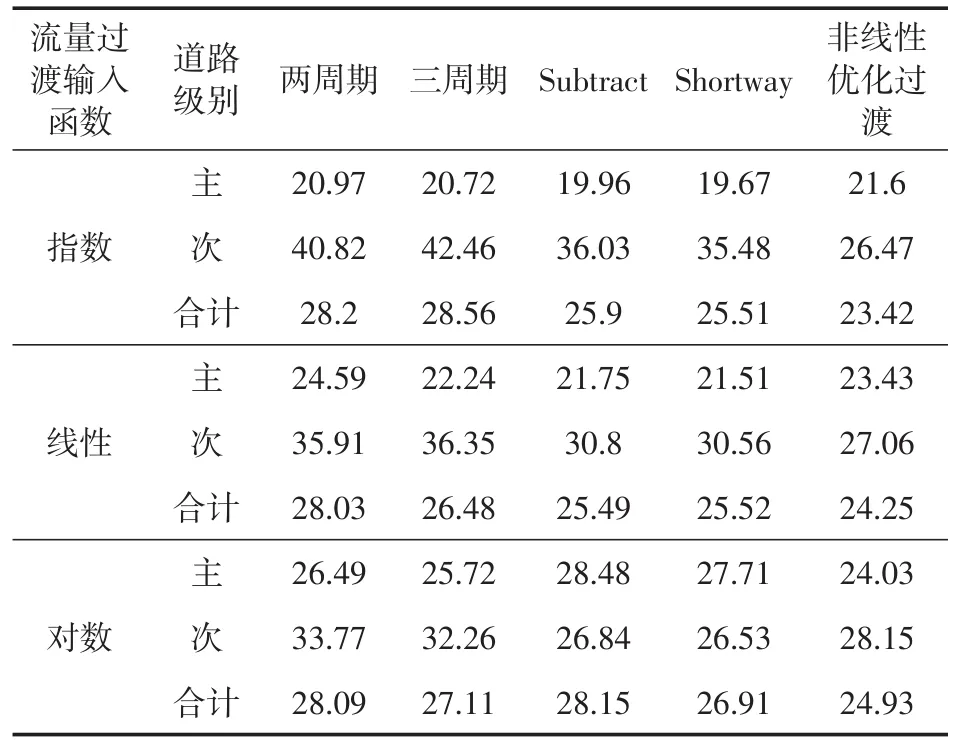
表3 和平路—清涼路不同過渡方法車均延誤(單位:pcu/s)
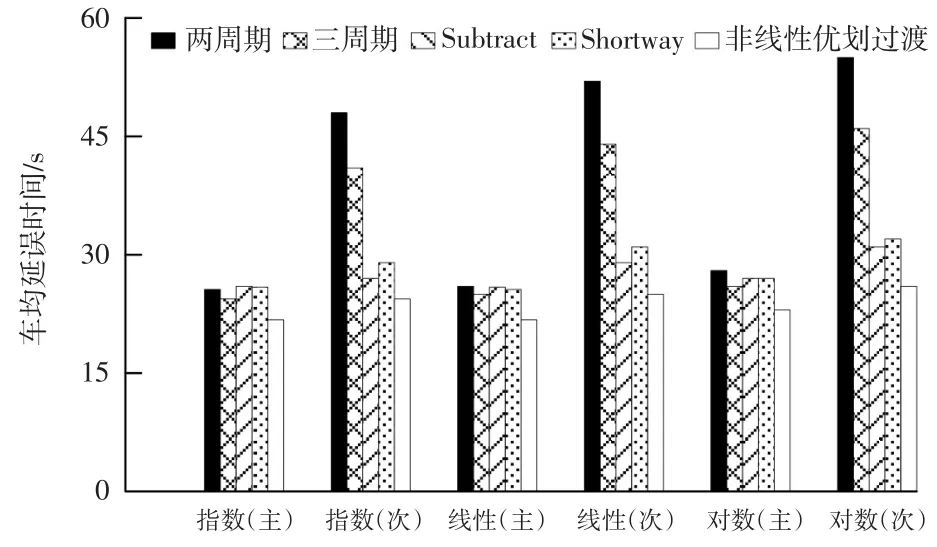
圖2 和平路—吳中大道不同過渡方法車均延誤
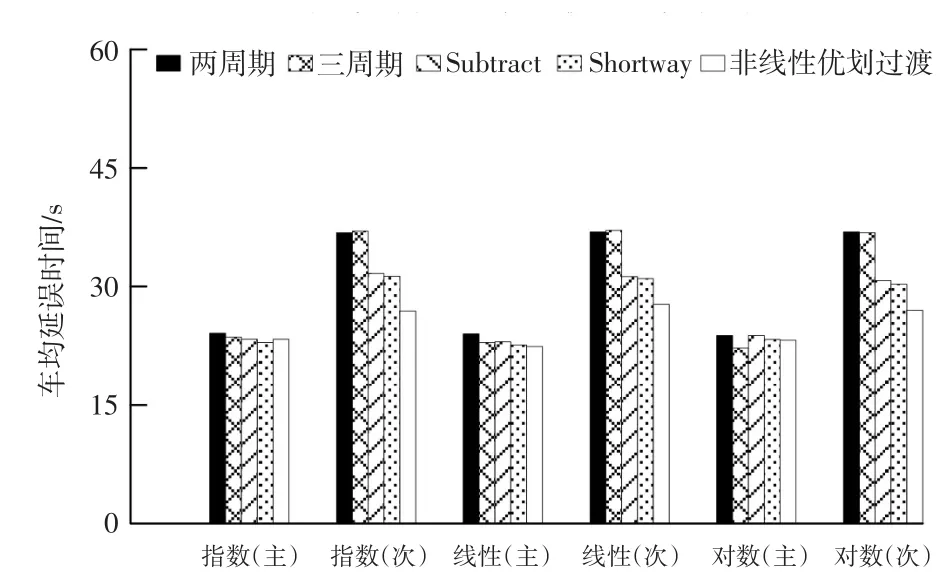
圖3 和平路—光華路不同過渡方法車均延誤
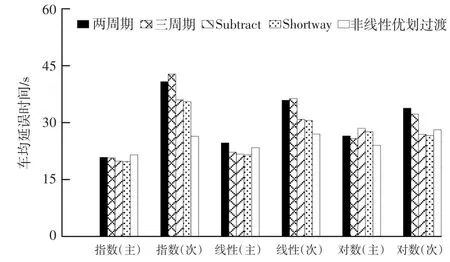
圖4 和平路—清涼路不同過渡方法車均延誤
對仿真結果進行分析可得出以下結論:(1)非線性優化過渡模型整體表現具有一定優勢。在延誤性能方面,相較于兩周期、三周期、Subtract、Shortway,非線性優劃過渡模型指數流量輸入時分別提高了20.1%,17.2%,10.4%,10%;線性流量輸入時分別提高了20%,14.6%,9.2%,9.2%;對數流量輸入時分別提高了18.9%,13.8%,11.9%,10.1%。(2)傳統過渡方法多數以犧牲次要道路車均延誤來提高主要道路延誤性能,而非線性優劃過渡模型對主次道路延誤都進行了優化,為次要道路保留了足夠的綠燈時間。(3)傳統過渡方法中,Shortway過渡方法在主次道路延誤方面表現最好。(4)兩周期和三周期過渡方法以犧牲次要道路延誤時間提升主要道路性能進行交通方案過渡。
3 結論
本文通過建立過渡期間基于車輛總延誤最小的非線性優劃約束模型,求得過渡期間最優過渡周期個數、最佳過渡步長以及各交叉口最優相位差變化量,通過聯合優化使得交叉口在過渡期間達到最優性能。通過對案例的仿真對比分析可知,所提出的過渡模型在大范圍交通條件下與傳統過渡方法相比具有明顯優勢,在減少車均延誤的同時,也保證了干道最寬綠波帶。然而本文僅以過渡時期延誤為目標,未考慮其他控制目標,比如排隊長度、最大通行能力等。所研究的干道協調控制背景周期時長相同,而實際控制中存在有的交叉口控制周期為雙周期的情況,所以未來的研究需要從這些方面入手。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34