窄帶隨機激勵雙穩壓電懸臂梁響應機制與能量采集研究?
2018-12-02 11:10:32吳娟娟冷永剛喬海劉進軍張雨陽
物理學報 2018年21期
關鍵詞:系統
吳娟娟 冷永剛 喬海 劉進軍 張雨陽
1)(天津大學機械工程學院,天津 300350)2)(卡特彼勒技術研發(中國)有限公司,無錫 214028)(2018年1月10日收到;2018年7月30日收到修改稿)
具有中心頻率的窄帶隨機振動是一種典型的環境振動,其振動特征與環境的變化密切相關.本文以雙穩壓電懸臂梁能量采集系統為研究對象,分析系統在不同磁鐵間距下的等效線性固有頻率特性,以帶通濾波器輸出一定帶寬的窄帶隨機激勵模擬環境振動,研究系統的響應和能量采集特征.研究表明,對于一定帶寬的窄帶隨機激勵,一方面系統始終存在一個固定的磁鐵間距使其輸出達到峰值,另一方面當激勵中心頻率在一定范圍內變化時,系統還分別存在另外兩個或一個不同磁鐵間距也能使系統輸出達到峰值,而且該峰值特性是系統在其等效線性固有頻率處誘導雙穩或單穩“共振”形成的.研究結果可為具有窄帶隨機激勵特征的振動能量采集提供一定的理論和技術支持.
1 引 言
近二十年來,微加工技術和微電子技術的進展,推動了無線傳感、數據傳輸和醫療植入的微型化以及低能耗設備的發展[1].傳統以化學電池為主的供能方式不僅增加了系統的尺寸和質量,而且供能壽命有限、難以更換,因此人們尋找可以長期有效供電的能量采集技術.
環境中的振動是無處不在的,獲取環境中的振動能量有望解決微裝置的供電問題.根據能量轉換機理的不同,可以通過電磁式、靜電式和壓電式三種方式將振動能轉化為電能[2].與其他兩種方式相比,壓電式振動能量采集器具有結構簡單、能量轉換密度大、易于微型化和集成化等優點[3],因而得到人們更多的關注.
壓電能量采集器利用壓電片的正壓電效應將振動能轉化成電能.由于線性結構的壓電能量采集器具有狹窄的固有頻率特性,當激勵頻率稍微偏離梁的固有頻率時,產生的功率顯著下降[4],因此需要尋找寬頻帶響應的能量采集器.
近年來,利用非線性結構實現寬頻響應的能量采集方式得到了廣泛關注.在系統中增加磁鐵,或者利用壓力負荷來屈曲桿,都能使壓電能量采集器實現非線性雙穩態振動,從而得到寬頻響應的能量采集.Cottone等[5]和Gammaitoni等[6]進行了隨機激勵下的雙穩態能量采集實驗,分析了勢阱參數對輸出功率的影響.Ferrari等[7,8]數值仿真了隨機激勵下的非線性能量采集,并通過實驗發現在雙穩態振動下,壓電懸臂梁的偏斜位移與輸出電壓明顯大于在線性單穩態狀態下的輸出位移與電壓.陳仲生和楊擁民[9]通過調整磁鐵間距,使得能量采集器在寬帶低頻隨機激勵下實現寬帶能量采集.Gao等[10]提出彈性支撐結構的非線性能量采集器,保證系統在低強度隨機激勵下也能發生雙穩躍遷.
目前,非線性系統能量采集的研究主要是針對低頻寬帶隨機激勵或者諧波激勵的能量采集研究,然而實際中很多情形下的激勵往往不是單頻周期激勵或者低頻寬帶隨機激勵,而是能量集中在一定頻率范圍內的具有中心頻率的窄帶隨機激勵.例如一輛每小時63英里(1 mi=1.609344 km)行駛的1.6L福特汽車減振器垂直于路面方向的振動在10—30 Hz,克里夫頓懸索橋上的振動能量集中在22—46 Hz之間,熱電聯產發電機在正常工作情況下垂直于熱水泵方向的振動主要在209—219 Hz范圍內[2,11,12],人的運動和橋梁的振動頻率在1 Hz左右[13,14].目前,基于非線性壓電懸臂梁系統的窄帶隨機激勵下的系統響應及其能量采集的研究還鮮有報道.本文以非線性雙穩壓電懸臂梁能量采集系統為研究對象,通過建立雙穩壓電懸臂梁的集總參數模型,探討具有一定帶寬的窄帶隨機激勵對系統響應及能量采集的影響規律,研究系統等效線性固有頻率與系統響應特性之間的關聯性,為窄帶隨機激勵作用的雙穩壓電懸臂梁能量采集系統獲得更多的機電能量轉換提供可行的理論和技術支持.
2 雙穩壓電懸臂梁能量采集系統的非線性特性
圖1(a)是一個非線性壓電懸臂梁能量采集系統受力分析圖,壓電懸臂梁B由金屬板基底及其上粘貼的壓電陶瓷片組成,永磁體A位于懸臂梁B的自由端,沿懸臂梁B水平軸線延長線上與永磁體A相對的位置固定一塊永磁體C,永磁體C與永磁體A的物理特性和尺寸規格一致,且二者相互排斥,構成雙穩系統.需要說明的是,系統處于平衡位置時,不考慮磁鐵A的重力對壓電懸臂梁靜力形變的影響,此時磁鐵A位于懸臂梁水平位置延長線上,磁鐵A與外部磁鐵C水平對中且相互排斥.
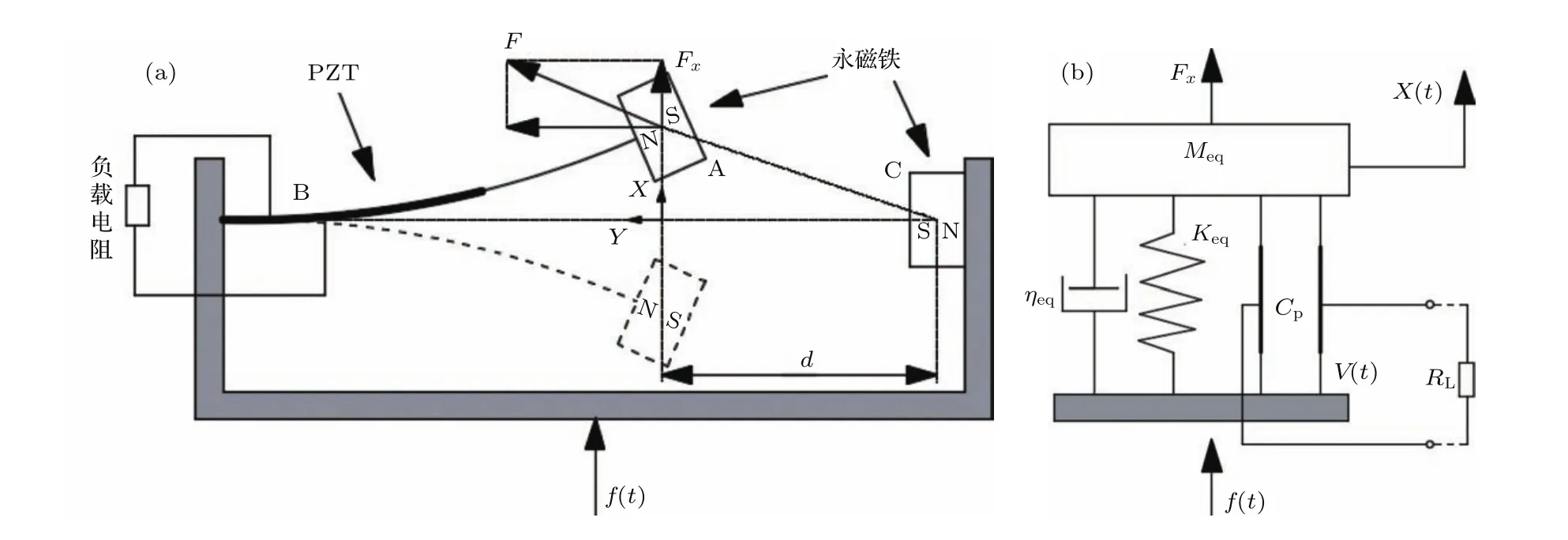
圖1 非線性壓電懸臂梁能量采集器 (a)受力分析圖;(b)系統等效模型Fig.1.Energy harvesting system of nonlinear piezoelectric cantilever beam:(a)Diagram of force analysis;(b)equivalent model of energy harvesting system.
圖1(a)結構可以簡化為典型的質量彈簧阻尼等效模型,如圖1(b)所示.由牛頓第二定律可得到系統集總參數的動力學方程[10]:
其中Meq,ηeq,Keq分別為系統的等效質量、等效阻尼和等效剛度;Fx為兩磁鐵之間的磁力F在豎直方向上的分力;f(t)為外界振動激勵;θ為壓電懸臂梁的機電耦合系數;以磁鐵C中心為坐標原點,X(t)為磁鐵A中心沿激勵方向的位移;k為集總參數模型的幅值修正因子;V(t)為壓電懸臂梁的輸出電壓.相應的壓電能量采集電路如圖2所示.
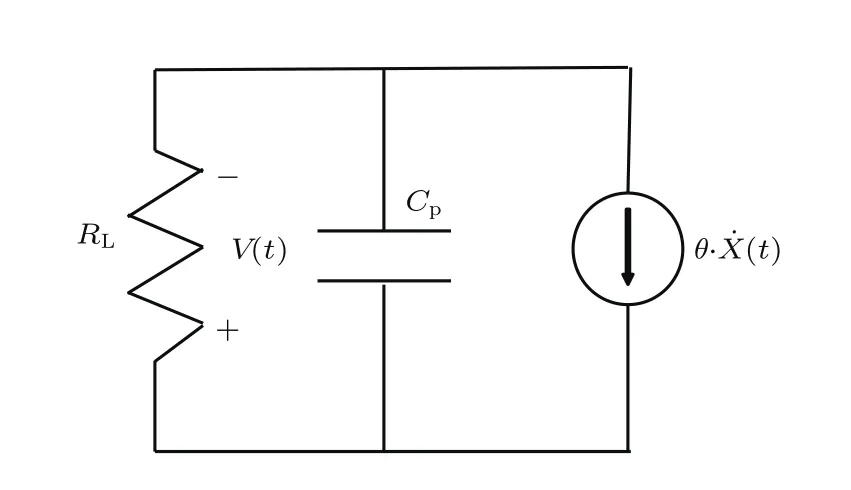
圖2 壓電能量采集電路圖Fig.2.Circuit diagram of piezoelectric energy harvesting system.
由基爾霍夫第一原理可以得到采集電路的電學方程為

式中RL為負載電阻;Cp為采集電路的等效電容,

其中ε31為相對介電常數,ε0為真空絕對介電常數,wb和lb分別是懸臂梁基體的寬度和長度,te是壓電陶瓷的厚度.
在兩磁鐵的間距d(兩磁鐵中心水平距離)為無窮大時,壓電能量采集器為線性振子.線性壓電振子的固有頻率可由求得.方程(1)和(2)中各參數的表達式參考文獻[10],懸臂梁的材料參數和幾何參數見第5節中表1和表2,將相關的參數代入到線性壓電振子固有頻率的公式中,可以得到系統的固有頻率fn=50.7 Hz.
根據磁化電流理論可計算兩塊磁鐵A和C之間磁力的垂直分力為[15]
其中,MA為磁鐵A本身的磁化強度;φ是MA與水平方向的偏轉角,為磁鐵A的上(或下)表面面積;lA,hA分別為磁鐵A的長度和高度;μ0是真空導磁率;Hy1和Hy2分別表示磁鐵C產生的磁場在磁鐵A的上表面和下表面中心處沿Y軸方向上的磁場強度大小,如圖3.
在不考慮重力的情況下,系統勢能包括等效模型中的彈性勢能和磁力Fx對磁鐵做的功,由此可得系統在X=X0時刻位置的勢函數:

圖4給出了系統的勢能函數U(X)隨著磁鐵間距d和位移X的變化,間距d很大時,系統趨近為線性系統,其勢函數為單穩,表現為只在原點處出現一個穩定的平衡位置;隨著間距d的減小,系統由線性系統變成非線性系統,其勢函數由單穩變為雙穩,即在兩個勢阱處出現兩個穩定的平衡位置,在原點處出現一個非穩定平衡位置.
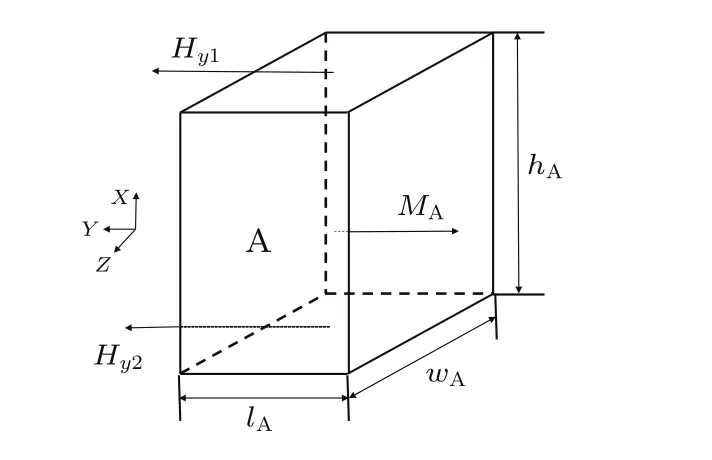
圖3 磁鐵A的尺寸結構及磁化方向示意圖Fig.3.Schematic diagram of magnet A’s sizes and magnetization..
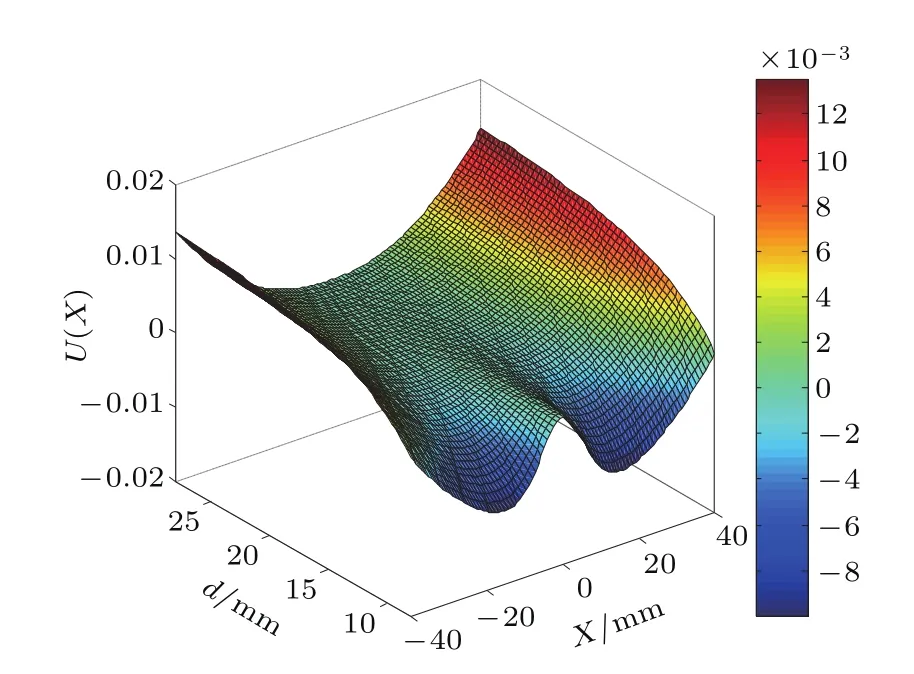
圖4 系統勢能函數U(X)與磁鐵間距d和位移X的關系Fig.4.Dependence of the system potential function U(X)on magnet spacing d and displacement X.
在X=0處對磁鐵力Fx進行泰勒展開,為了便于計算,參考文獻[15]可將磁力的垂直分力近似表達為
省略高階項可得近似結果為

這里,參數a,b通過(8)和(9)式計算:


參數b中的Tij表達式為
懸臂梁系統的非線性恢復力為
其中,KL=Keq?a.由(11)式可知,懸臂梁的非線性恢復力由懸臂梁的彈性力KeqX和兩磁鐵間磁力的豎直分力Fx=aX?bX3構成,而且a和b分別是磁力在豎直方向產生的線性剛度和非線性剛度.對(11)式求導可得到系統的總剛度KN為
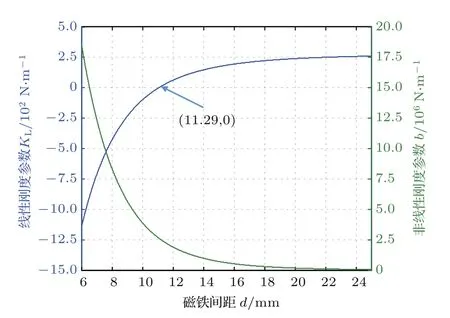
圖5 系統的線性剛度KL和非線性剛度b隨磁鐵間距d的變化Fig.5.Linear stiffness KLand nonlinear stiffness b of system varying with magnet spacings d.
(12)式表明,系統總剛度由線性剛度KL和非線性剛度b確定,并會隨著磁鐵間距d和位移X而變化.當磁鐵間距d很大時,壓電懸臂梁為線性振動,系統總剛度KN=Keq是一個定值.當d逐漸減小時,系統總剛度將受到a和b變化的影響.圖5給出了系統總剛度中線性剛度KL和非線性剛度b隨d的變化曲線.由圖5可知,隨著d的減小,KL逐漸由正數減小至負數,其中正負剛度的分界點在d0=11.29 mm處,此點也是系統雙穩勢阱運動和單穩勢阱運動的分界點[16],而b隨著d減小由零逐漸增大,表明非線性剛度逐漸增強,這與非線性磁力隨間距減小而增大的因素成正相關關系.
3 等效線性固有頻率的計算
為了能夠更好地分析窄帶激勵下雙穩能量采集系統的輸出響應,參照文獻[17]對系統進行線性化處理計算,以得到系統的近似等效線性固有頻率.假定?X?是非線性雙穩系統位移響應的均值,且其值不一定為0,做如下的轉換:

其中X0(t)是等效線性系統的位移響應.令窄帶隨機激勵f(t)為非線性雙穩壓電懸臂梁系統的輸入,并令ωSL為等效線性化系統的固有頻率,則動力學方程(1)可以寫成


由
得
于是近似計算求得ω2SL=(KL+3b?X2?)/Meq,其中E表示為該參數的期望值.當激勵強度較小,即滿足3b?X2?小于|KL|(一個數量級以上)時,懸臂梁振動幅度也相對較小,等效線性化系統的固有頻率可以近似為

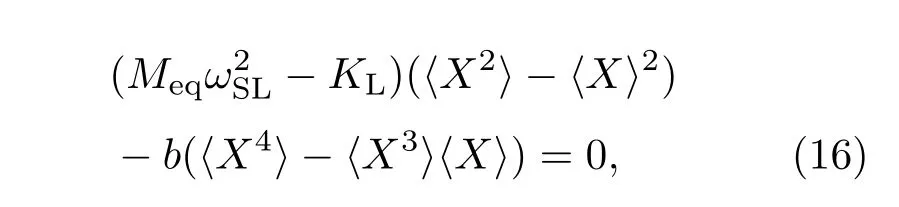
圖6給出了系統的等效線性固有頻率fSL與磁鐵間距d的關系,曲線最低點對應的間距正好對應系統線性剛度正負分界點的間距值d0=11.29 mm,也就是系統單穩和雙穩勢阱的分界點,該分界點值可根據KL=0計算得到.
圖6 系統的等效線性固有頻率fSL與磁鐵間距d的關系Fig.6.Equivalent linear natural frequency fSLof system varying with magnet spacing d.
這里需要強調的是,非線性方程(1)等效為線性化方程(14)后,由(17)式得到了圖6反映等效線性系統方程(14)固有特性的等效線性固有頻率特性曲線,該固有頻率曲線隨間距d變化,并在分界點間距d0處接近零.當等效線性系統(14)受到的激勵頻率(如窄帶隨機激勵的中心頻率)與其等效線性固有頻率一致時,根據線性系統共振原理易得,系統響應會在等效線性固有頻率處產生共振峰,且分界點間距d0左右兩側在等效線性固有頻率處產生的共振峰響應分別具有雙穩和單穩特性.此外,當等效線性固有頻率fSL小于線性系統固有頻率fn時,每一個fSL可對應兩個不同的間距d值,分別在d0兩側;而當fSL>fn時,在一定頻率范圍內(如圖6小于120 Hz),fSL只有一個小于d0的d值與之對應.
4 窄帶隨機激勵的動態特性
環境中的窄帶隨機激勵是大部分能量集中在中心頻率附近、有一定頻率帶寬的限帶隨機激勵,這種隨機激勵由中心頻率、帶寬和強度這三個參數確定[18].窄帶隨機激勵f(t)可以通過將Gauss白噪聲W(t)輸入下面的帶通濾波器得到[19,20]:

其中ωf為中心頻率,γ為帶寬.Gauss白噪聲W(t)的功率譜密度函數由下式給出:

其中S0為輸入白噪聲W(t)的強度.W(t)的自相關函數Rin(τ)為

其中δ(τ)為狄利克雷函數.方程(18)輸出激勵f(t)的自相關函數Rout(τ)為
其中H(ω)為方程(18)的傳遞函數.由方程(18)可以求得

將(22)式代入(21)式,并進行積分可以得到


已知f(t)的均值為0,所以窄帶隨機激勵f(t)的均方值等于Gauss白噪聲激勵W(t)譜密度的π倍.
圖7是不同中心頻率和帶寬的隨機激勵f(t)的功率譜圖,圖中各曲線下的面積是與中心頻率ωf和帶寬γ無關的常數,即隨機激勵f(t)的強度(或方差)是常數.因此,將強度相同的Gauss白噪聲輸入參數ωf和γ大小不同的濾波器時,其輸出的不同中心頻率和帶寬的窄帶隨機激勵的強度是相同的.
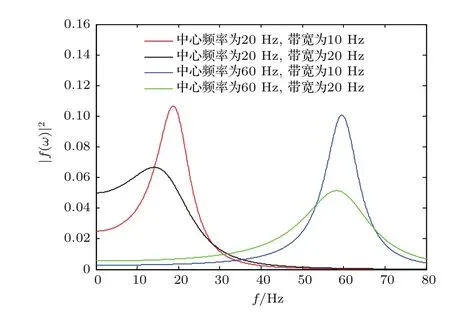
圖7 不同中心頻率和帶寬的窄帶隨機激勵的功率譜Fig.7.Power spectra of narrow-band random excitation with different center frequencies and bandwidths.
5 窄帶隨機激勵中心頻率對雙穩壓電懸臂梁響應與輸出電壓的影響
為了仿真窄帶隨機激勵作用下系統的響應及能量采集性能,本文所采用的一組材料屬性參數和系統幾何結構尺寸分別見表1和表2,仿真分析中所需的其他參數RL=10 M?.對于一定形狀尺寸的雙穩壓電懸臂梁能量采集系統,兩磁鐵間距d決定了非線性磁力的大小,因此系統輸出電壓的大小(由均方根值表示)將受d的影響而變化.
將強度D=0.2的Gauss白噪聲激勵輸入γ=10 Hz和不同ωf值參數的帶通濾波器(18)式,得到不同中心頻率的窄帶隨機激勵.將這些激勵分別作用到系統方程(1)和(2)上,得到系統輸出電壓Vrms隨磁鐵間距d和窄帶激勵中心頻率fc=2πωf的變化關系,如圖8所示,圖中模擬計算的d值分辨率為0.10 mm,fc值的分辨率為1 Hz.由圖8可知,系統輸出電壓峰值呈現出一定的規律性.首先,無論fc取何值,系統總在d0=11.5 mm處附近出現峰值電壓輸出,類似于寬頻帶激勵的最優間距[10],且該間距d0與窄帶隨機激勵的中心頻率無關.其次,除了d0=11.5 mm外,當fc值分別在(0,50 Hz)和(50 Hz,100 Hz)區間變化時,還分別存在另外兩個和一個不同間距值也能產生峰值電壓輸出;而當fc值大于100 Hz后,沒有額外間距值的峰值電壓存在.
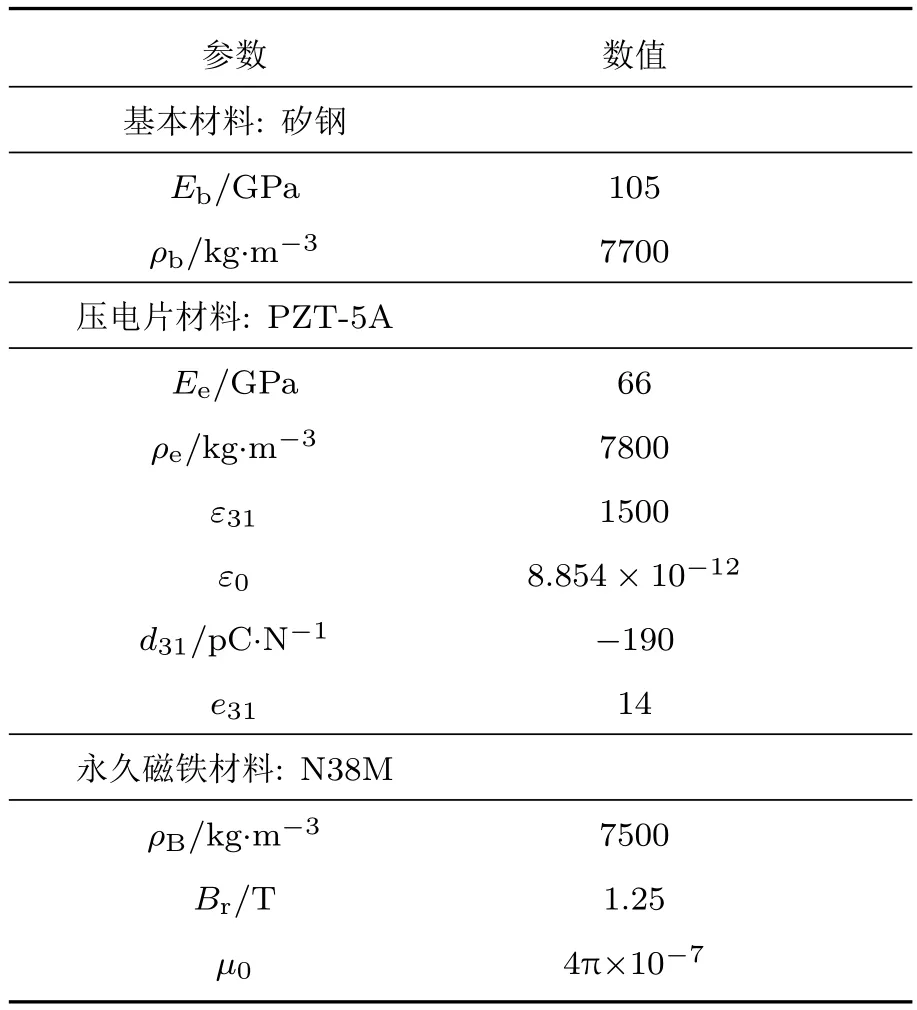
表1 懸臂梁的主要材料參數Table 1.Main material parameters of cantilever beam.
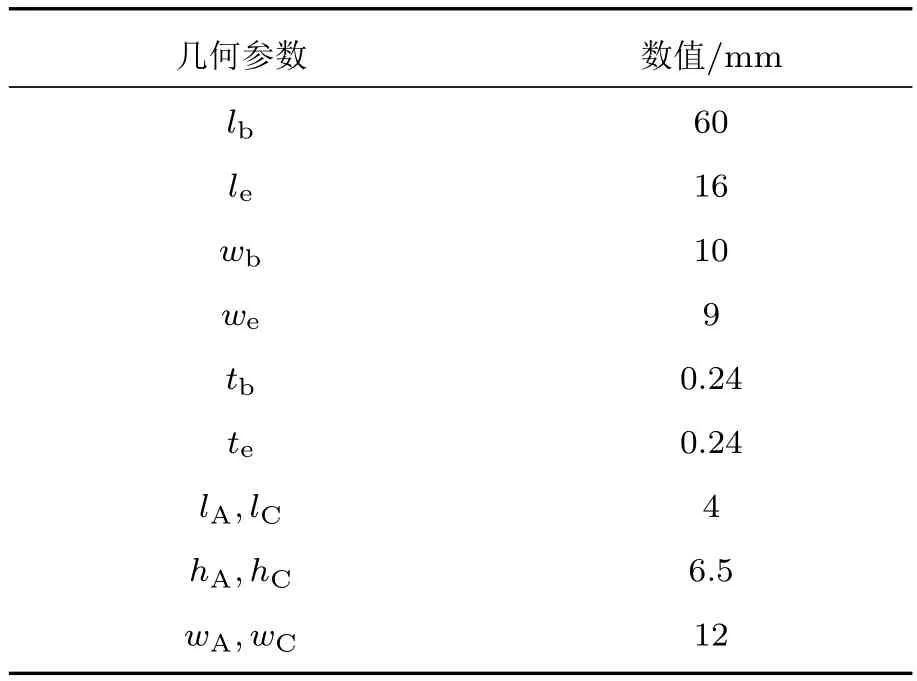
表2 懸臂梁的主要幾何參數Table 2. Main geometric parameters of cantilever beam.
通過圖8(b)和圖6中兩條彎曲線的相似性(其中兩者之間的誤差來自泰勒展開計算磁力和計算等效線性固有頻率時的近似省略項),可判定圖8(a)系統這種峰值輸出電壓間距隨中心頻率變化的規律,是與圖6系統的等效線性固有頻率隨磁鐵間距的變化規律有關.圖8(b)中的兩條彎曲線可以認為是中心頻率與等效線性固有頻率相等系統達到共振的響應峰值曲線,根據圖6中等效線性固有頻率曲線的單、雙穩分界點,可知圖8(b)中兩曲線匯聚的最低點間距d0=11.5 mm應該是系統單、雙穩的分界點間距,且d0的左右側峰值曲線分別具有雙穩和單穩性質的共振.此外,不同中心頻率的窄帶隨機激勵可在一個或兩個磁鐵間距下,誘導系統在其等效線性固有頻率處產生雙穩或單穩“共振”,從而使系統輸出電壓達到峰值.
圖8 輸出電壓Vrms隨磁鐵間距d和窄帶中心頻率fc的變化圖,其中激勵強度和帶寬分別為D=0.2和γ=10 Hz,圖(b)是圖(a)的俯視圖Fig.8.Dependence of output voltage Vrmson magnet spacing d and the center frequency fcwhile D=0.2 and γ=10 Hz.Panel(b)is the top view of Panel(a).
除了在等效線性固有頻率處產生的峰值輸出外,圖8(b)中在分界點間距d0處還多出一條峰值直線,該峰值間距與窄帶激勵的中心頻率無關,它是由激勵中的隨機噪聲引起的.為了驗證這一推測,令方程(1)的激勵f(t)為純諧波激勵作用于系統,得到系統響應輸出電壓與輸入頻率和磁鐵間距的關系,如圖9所示.可以看出,由于諧波激勵沒有隨機噪聲成分,所以就沒有類似于圖8(b)中間距不變的峰值輸出曲線,由此驗證了推測.下面根據中心頻率fc由小增大的變化,分別討論峰值輸出電壓對應不同間距d的系統響應機制.

圖9 純諧波激勵輸出電壓Vrms隨磁鐵間距d和諧波頻率fc的變化規律Fig.9.Dependence of output voltage Vrmson magnet spacing d and the harmonic frequency fcunder pure harmonic excitation.
1)取中心頻率fc=10 Hz.圖10(a)給出了系統在該中心頻率處輸出電壓與磁鐵間距關系曲線Vrms-d,可知系統只存在一個最大峰值輸出電壓時磁鐵間距d=11.2 mm(在圖8的d0附近),它是窄帶隨機激勵下系統響應始終存在的分界點間距.圖11給出了該峰值間距d=11.2 mm處系統的位移響應、相圖和輸出電壓頻譜圖.由圖可知,此時能量采集系統的懸臂梁處于大幅度的雙阱間躍遷振蕩,其機電能量轉換效果好,輸出電壓值可達到峰值0.1732 V.
根據圖6分析,中心頻率fc小于50 Hz時,應有3個間距對應峰值輸出電壓.之所以圖10(a)只有1個間距的峰值電壓,應該是模擬計算的d值分辨率太低,使3個間距的輸出峰值“擠”在了一起.為證明這一點,將模擬計算d值分辨率提高到0.01 mm,圖10(a)峰值處高分辨率d的細化波形如圖10(b)所示.可以看出,在d=11.2 mm附近出現多個凸起的小峰值,表明圖10(a)中無法分辨出明顯的3個峰值間距,是由于太低的間距分辨率和隨機干擾的影響.實際上圖8在10 Hz中心頻率處也很難分清3個明顯間距的峰值.
根據圖6可知,fSL=10 Hz處的間距d1=11.1 mm和d2=11.3 mm非常接近,與圖10的分界點間距d=11.2 mm幾乎重合,所以在該激勵中心頻率下,理論上存在的兩個峰值間距d1和d2在圖10或圖8中很難分辨.
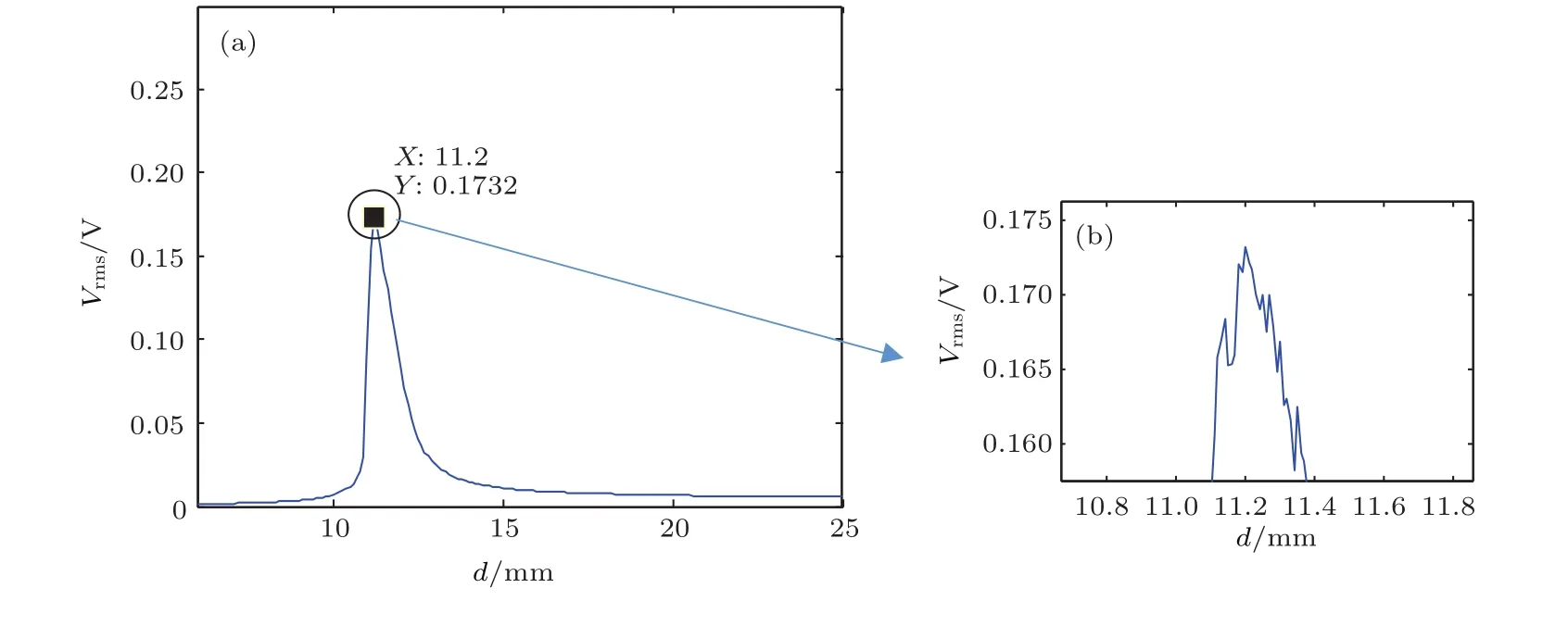
圖10 激勵中心頻率fc=10 Hz時輸出電壓Vrms與磁鐵間距d的關系 (a)d=0.10 mm;(b)d=0.01 mmFig.10.Output voltage Vrmsvarying with magnet spacing d when fc=10 Hz:(a)d=0.10 mm;(b)d=0.01 mm.
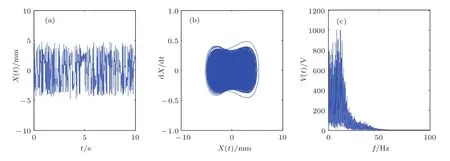
圖11 激勵中心頻率fc=10 Hz和磁鐵間距d=11.2 mm時系統的(a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.11.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=10 Hz and d=11.2 mm.
2)取中心頻率fc=25 Hz.圖12(a)是該激勵下系統輸出電壓與磁鐵間距關系曲線Vrms-d,相比于fc=10 Hz的情況,此時Vrms-d曲線中除了在圖8的d0附近有一個峰值間距d=11.1 mm外,還多了一個dR=12.1 mm的峰值間距.d=11.1 mm仍是系統始終存在的雙穩響應的分界點間距,該間距處的位移響應、相圖和輸出電壓頻譜如圖13所示.dR=12.1 mm因大于分界點間距,故在dR間距處產生了單穩性質的共振輸出,dR處的位移響應、相圖和輸出電壓頻譜如圖14所示.
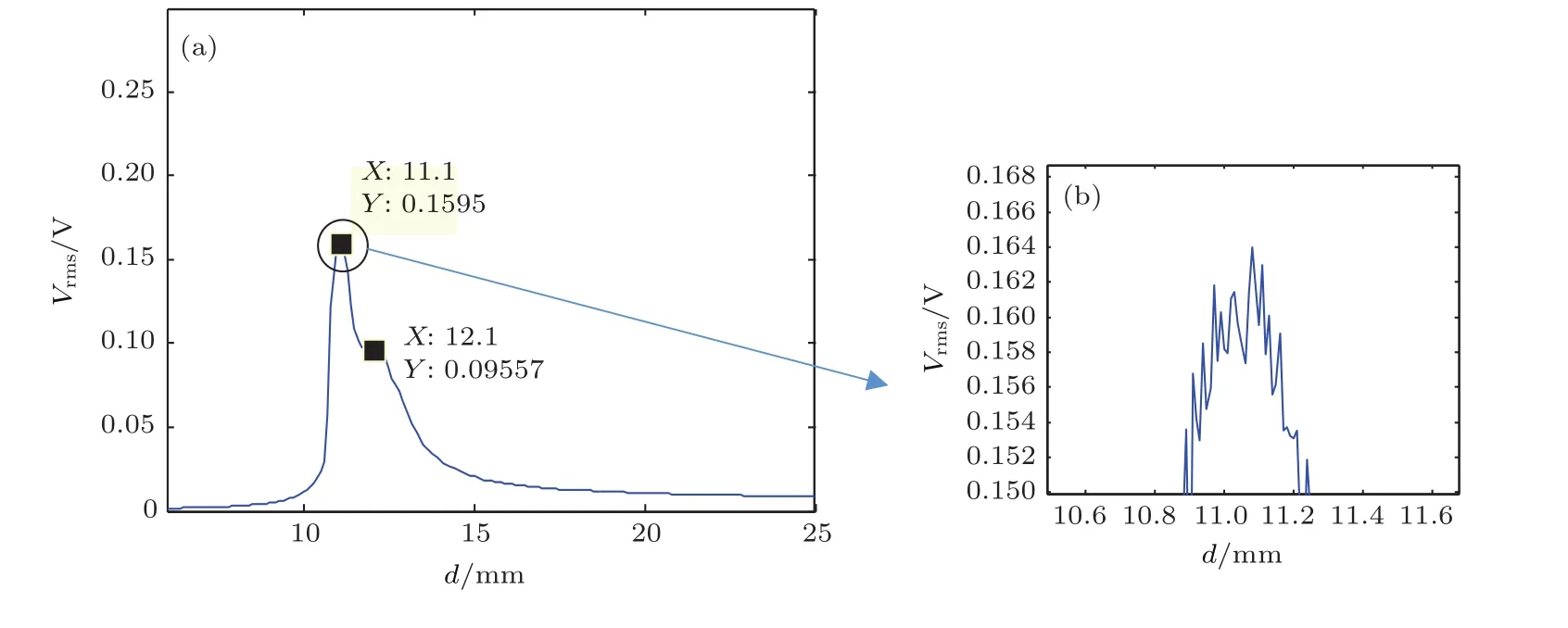
圖12 激勵中心頻率fc=25 Hz時輸出電壓Vrms和磁鐵間距d的關系 (a)d=0.10 mm;(b)d=0.01 mmFig.12.Output voltage Vrmsvarying with magnet spacing d when fc=25 Hz:(a)d=0.10 mm;(b)d=0.01 mm.
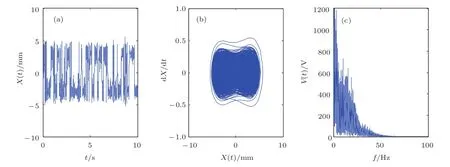
圖13 激勵中心頻率fc=25 Hz和磁鐵間距d=11.1 mm時系統的(a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.13.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=25 Hz and d=11.1 mm.
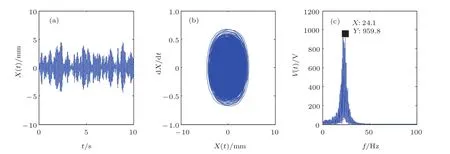
圖14 激勵中心頻率fc=25 Hz和磁鐵間距d=12.1 mm時系統的(a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.14.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=25 Hz and d=12.1 mm.
根據圖6可知,在fc=25 Hz時,系統的另一個雙穩性質的共振響應峰值間距是d1=10.6 mm,但在圖12(a)中并沒有出現,原因仍然是d值模擬分辨率過低.將模擬計算的d值分辨率提高到0.01 mm,重新計算后的結果如圖12(b),可以發現系統在d=11.1 mm附近處有許多凸起的小峰值而不是兩個,這同樣是由于太近的間距加上隨機干擾,很難明顯判斷兩個間距的峰值.實際上圖8在25 Hz中心頻率處也只能看清峰值間距d0右側的峰值輸出,而很難分清峰值間距d0和左側間距對應的峰值.
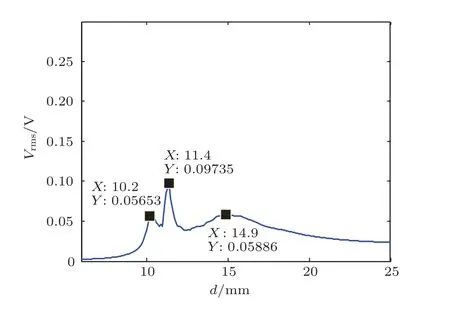
圖15 激勵中心頻率fc=40 Hz時輸出電壓Vrms和磁鐵間距d的關系Fig.15.Output voltage Vrmsvarying with magnet spacing d when fc=40 Hz.
3)取中心頻率fc=40 Hz.圖15是該激勵頻率下系統輸出電壓與磁鐵間距關系曲線Vrms-d,此時Vrms-d曲線在3個間距d=11.4 mm,dL=10.2 mm和dR=14.9 mm處呈現出3個明顯的峰值.顯然,d=11.4 mm仍是系統雙穩響應的分界點間距d0,其位移響應、相圖和輸出電壓頻譜如圖16所示.而根據圖6可知,fSL=40 Hz處的兩個間距d1=9.8 mm和d2=14.9 mm,分別對應圖15中的dL=10.2 mm和dR=14.9 mm.因dR=14.9 mm大于分界點間距,故其響應是單穩態的共振響應,dR處的位移響應、相圖和輸出電壓頻譜如圖17所示.而在dL=10.2 mm處,系統響應雖然也是單穩態的振蕩響應,如圖18所示系統的位移響應、相圖和輸出電壓頻譜,但因dL=10.2 mm小于分界點間距,且該間距系統具有雙穩振動特性,故其響應是在雙穩勢阱中的一個單勢阱內的共振振蕩響應.在圖8中心頻率40 Hz處,3個間距峰值也已清晰可見.
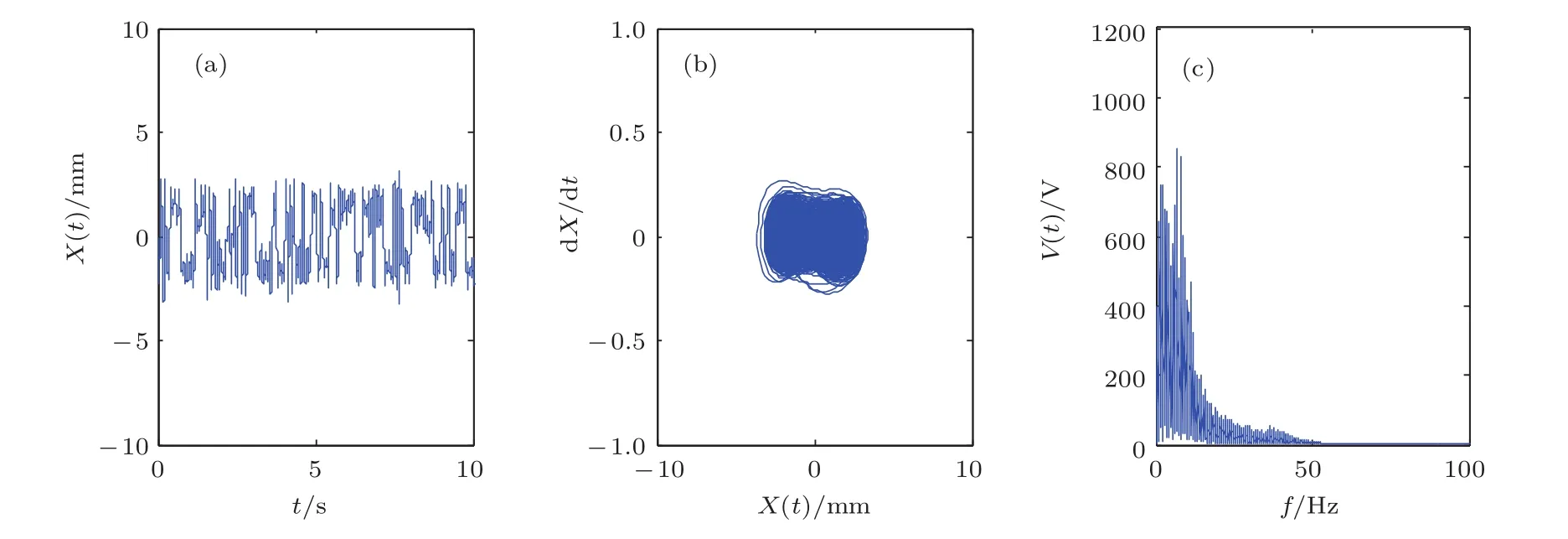
圖16 激勵中心頻率fc=40 Hz、磁鐵間距d=11.4 mm時系統的 (a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.16.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=40 Hz and d=11.4 mm.
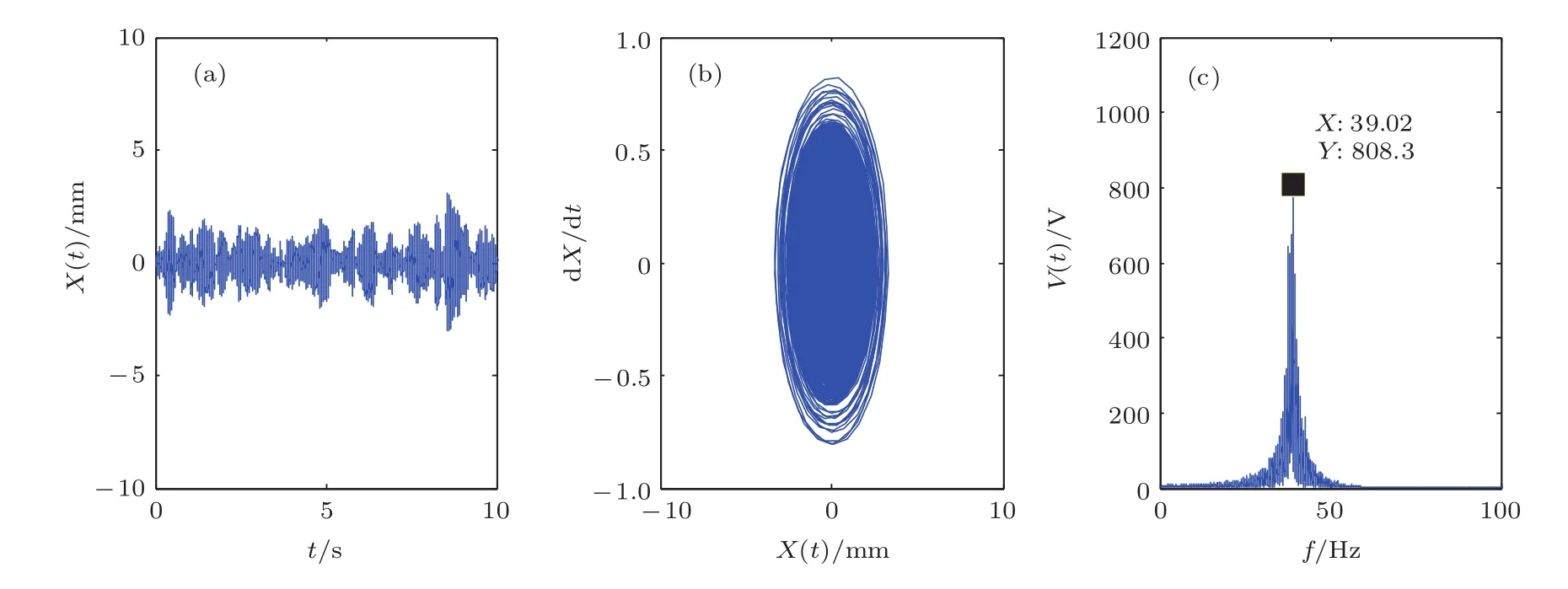
圖17 激勵中心頻率fc=40 Hz、磁鐵間距dR=14.9 mm 時系統的 (a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.17.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=40 Hz and d=14.9 mm.
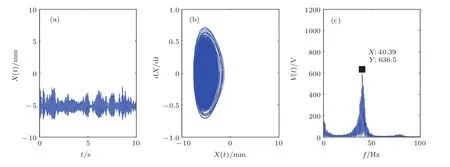
圖18 激勵中心頻率fc=40 Hz、磁鐵間距dL=10.2 mm 時系統的 (a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.18.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=40 Hz and d=10.2 mm.
4)取中心頻率fc=50 Hz.圖19是該激勵下系統輸出電壓與磁鐵間距關系曲線Vrms-d,由于fc=50 Hz與系統線性固有頻率幾乎相等,因此50 Hz中心頻率的系統響應可能出現3個峰值間距,也可能出現兩個峰值間距.圖19所示的Vrms-d曲線中出現了兩個明顯的峰值間距,分別是dL=9.6 mm和d=11.4 mm.顯然,d=11.4 mm仍是系統雙穩響應的分界點間距d0,其位移響應、相圖和輸出電壓頻譜如圖21所示,且根據圖6易知,fSL=50 Hz處的1個間距d1=9.2 mm應該就是dL=9.6 mm,且dL小于分界點間距,因此系統在此間距響應是雙穩勢阱中的一個單勢阱內的共振振蕩響應,圖20是dL處的位移響應、相圖和輸出電壓頻譜.
另外,由于中心頻率在線性系統的固有頻率處,因此隨著磁鐵間距的增大,系統逐漸從非線性變成線性,其響應逐漸表現為中心頻率的線性共振與隨機激勵振動的合成響應,其響應值隨著間距d的增大而增大并趨于一個定值,如圖19所示.
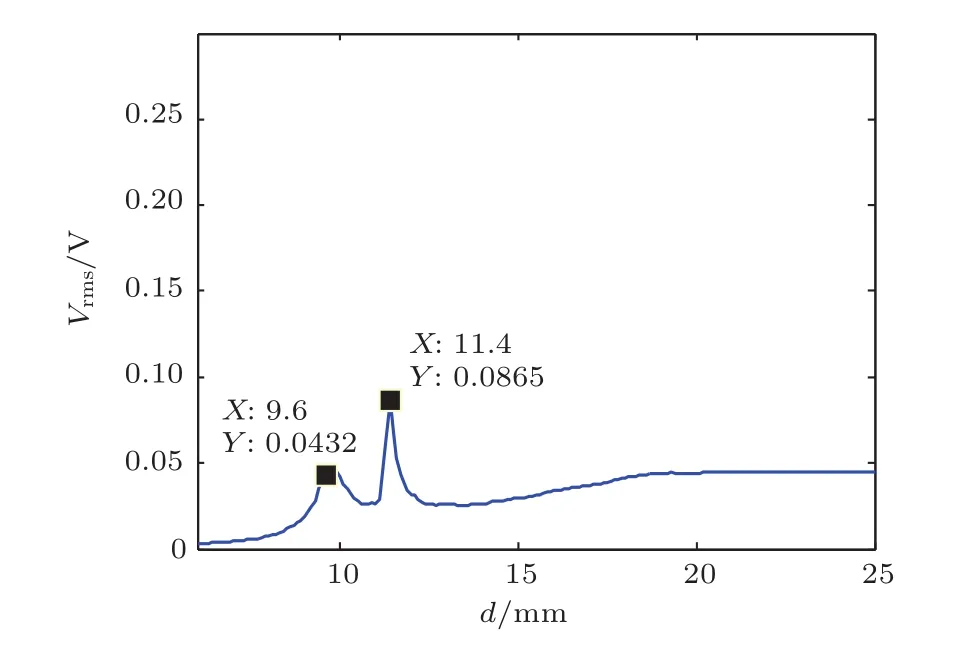
圖19 激勵中心頻率fc=50 Hz時輸出電壓Vrms和磁鐵間距d的關系Fig.19.Output voltage Vrmsvarying with magnet spacing d when fc=50 Hz.
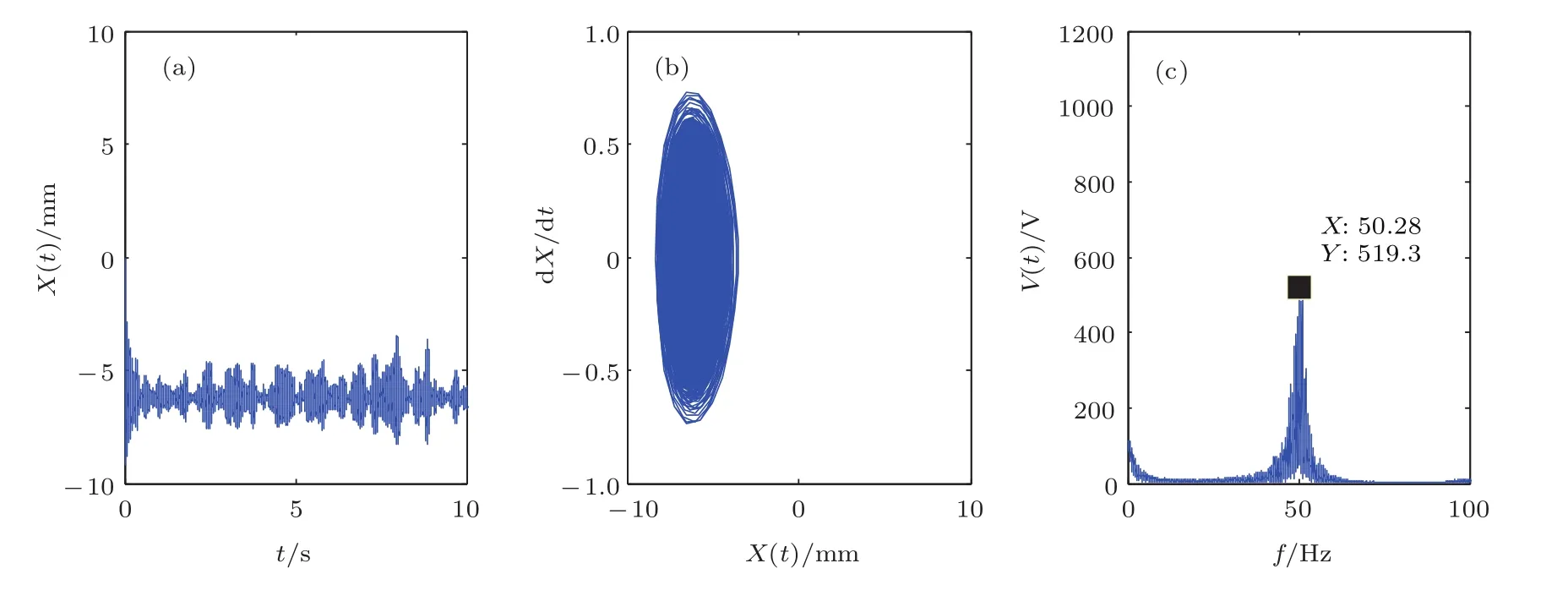
圖20 激勵中心頻率fc=50 Hz、磁鐵間距d=9.6 mm時系統的(a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.20.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=50 Hz and d=9.6 mm.
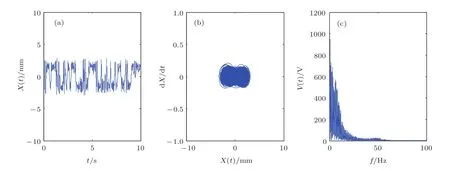
圖21 激勵中心頻率fc=50 Hz、磁鐵間距d=11.4 mm時系統的 (a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.21.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=50 Hz and d=11.4 mm.
5)取中心頻率fc=70 Hz.由圖22可知,系統輸出電壓Vrms-d曲線有兩個峰值,對應的磁鐵間距分別為dL=7.9 mm和d=11.4 mm.由于70 Hz大于fn=50 Hz,因此與圖6對比不難看出,除了d=11.4 mm是系統雙穩響應的分界點間距d0(如圖23該間距處的位移響應、相圖和輸出電壓頻譜圖),在fc=70 Hz時,系統只存在1個小于分界點間距的雙穩單勢阱內的共振振蕩響應間距7.9 mm,其位移響應、相圖和輸出電壓頻譜圖如圖24所示.
6)取中心頻率fc=120 Hz.圖25表明該激勵頻率下的系統輸出電壓Vrms-d曲線只有一個峰值間距,對應圖8系統雙穩響應的分界點間距d0=11.5 mm,其位移響應、相圖和輸出電壓頻譜如圖26所示.在該頻率處,圖6中已不存在對應等效線性固有頻率的間距值,所以此時系統只在間距d0存在峰值電壓輸出.
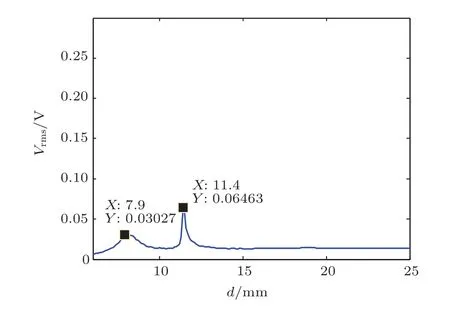
圖22 激勵中心頻率fc=70 Hz時輸出電壓Vrms和磁鐵間距d的關系Fig.22.Output voltage Vrmsvarying with magnet spacing d when fc=70 Hz.
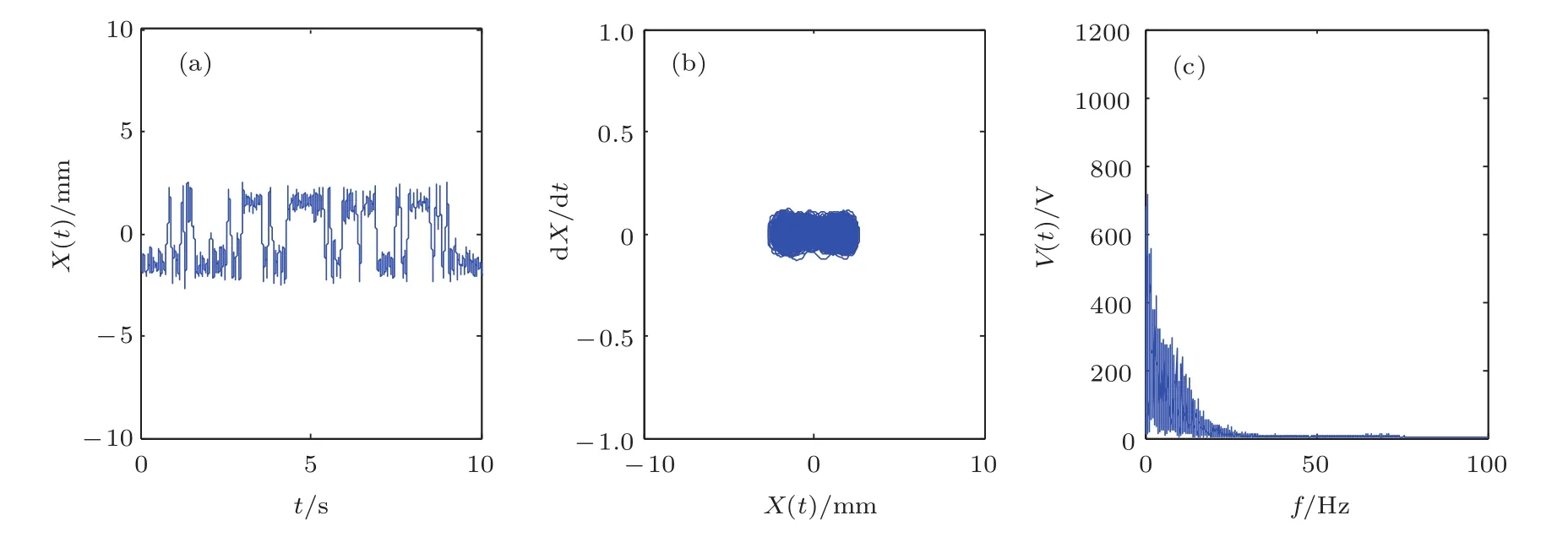
圖23 激勵中心頻率fc=70 Hz、磁鐵間距d=11.4 mm時系統的 (a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.23.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=70 Hz and d=11.4 mm.
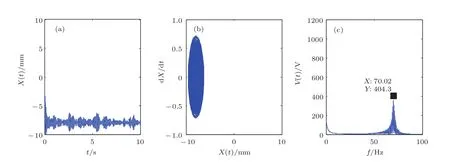
圖24 激勵中心頻率fc=70 Hz、磁鐵間距d=7.9 mm時系統的(a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.24.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=70 Hz and d=7.9 mm.

圖25 激勵中心頻率fc=120 Hz時輸出電壓Vrms和磁鐵間距d的關系Fig.25.Output voltage Vrmsvarying with magnet spacing d when fc=120 Hz.
圖26 激勵中心頻率fc=120 Hz、磁鐵間距d=11.5 mm時系統的(a)位移響應、(b)相圖、(c)輸出電壓頻譜圖Fig.26.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=120 Hz and d=11.5 mm.
6 實驗驗證
為了驗證前面的理論分析與仿真模擬結果,本文參考表1和表2的參數制作了壓電懸臂梁能量采集結構,經測量該壓電懸臂梁的線性固有頻率為15 Hz.壓電陶瓷的型號為PZT-5A,結構上采用雙晶片結構,兩層壓電陶瓷片同極化方向排列,與中間電極層緊密粘結,在壓電陶瓷上下表面引出導線作為電壓輸出,中間電極層即懸臂梁基體的材料為矽鋼.壓電懸臂梁自由端固定有永磁鐵A,型號為N38M,其根部固定在基座1上,且基座1可以在能量采集結構底板基座2上沿梁長度方向水平移動,用于調整磁鐵間距d.與磁鐵A一樣的磁鐵C固定在基座3上,且基座3與底板基座2固定,見圖27(a).壓電懸臂梁平面平行于底板基座2平面放置,整個能量采集結構通過底板基座2與激振器連接.同時,懸臂梁平面垂直方向放置有位移傳感器,用以采集懸臂梁振動時的位移響應.
此外,為了滿足前文提到的“系統處于平衡位置時,不考慮磁鐵A和外部磁鐵C的重力對壓電懸臂梁靜力形變的影響”的假設,實際實驗過程中,底板基座2平面及懸臂梁的平面均垂直于地面放置,如圖27(b)所示,即激振器沿平行于地面的方向激勵底板基座2振動,以消除磁鐵的重力對壓電懸臂梁的靜力形變影響.
整個實驗測試系統框架如圖28所示.實驗中,首先在計算機中生成強度為0.2、帶寬為5 Hz、中心頻率不同的窄帶激勵數字信號,然后通過USB接口輸入給信號發生器,再由信號發生器輸出并經過功率放大器和激振器作用于能量采集器上,能量采集器的壓電懸臂梁在窄帶激勵的作用下振動發電,其壓電片產生的電壓通過引線由數據采集器進行采集,位移傳感器測量的懸臂梁振動位移也同時由數據采集器進行采集,電壓和位移兩信號同時送入計算機中進行分析.實驗激勵強度以加速度值度量,保持0.5 g有效值.
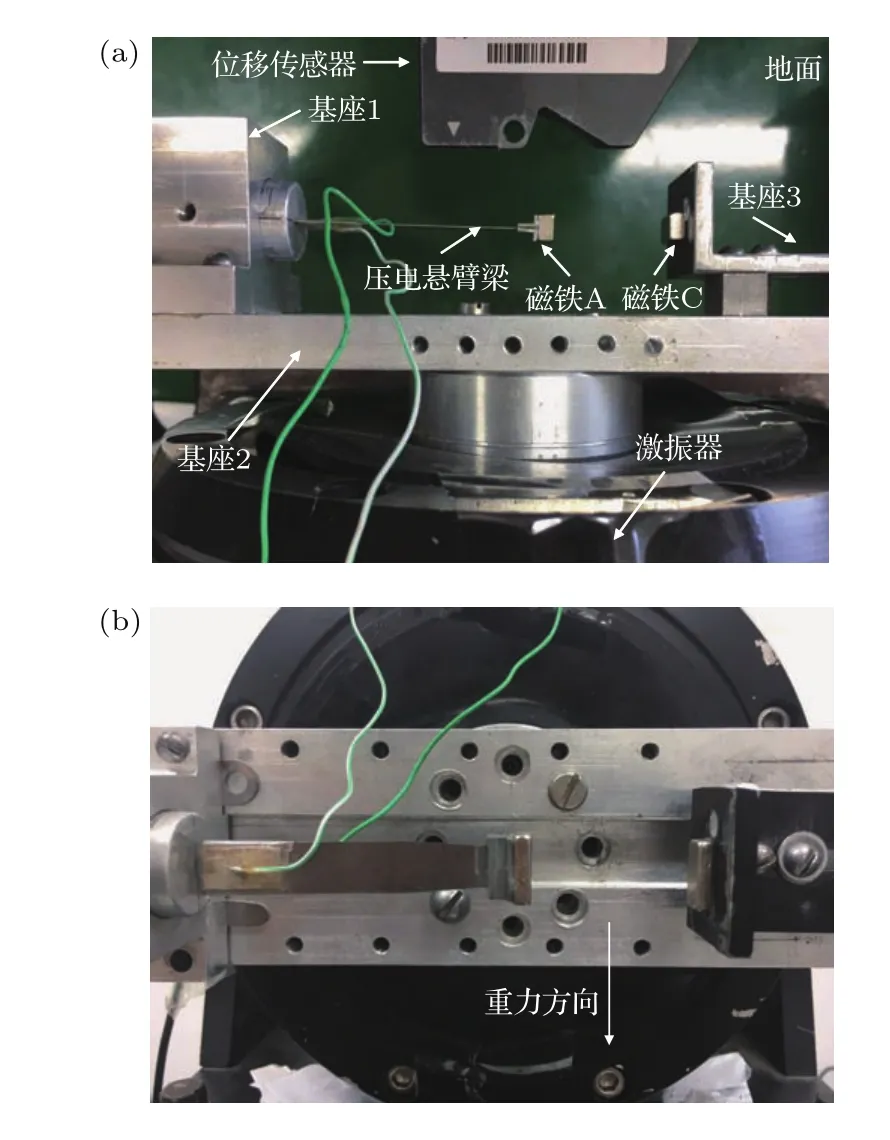
圖27 壓電振動能量采集系統實驗結構圖Fig.27.Experimental structure of piezoelectric vibration energy harvesting system.

圖28 壓電振動能量采集器實驗測試系統Fig.28.Experimental test system of piezoelectric vibration energy harvesting system.
通過調節磁鐵間距d和激勵中心頻率fc,實驗中分別記錄了不同d值和fc值下壓電懸臂梁的輸出電壓均方值Vrms,仿照圖8(a)和圖8(b),可以繪制輸出電壓均方值Vrms關于磁鐵間距d和激勵中心頻率fc的關系,如圖29(a)和圖29(b)所示.可以看出,圖8(a)和圖8(b)與圖29(a)和圖29(b)的形狀相似,說明窄帶激勵下系統的電壓輸出特性與仿真模擬的結果基本一致.無論激勵中心頻率為多少,壓電懸臂梁系統始終在d0=18 mm附近出現峰值電壓輸出,可判定此間距為窄帶激勵下系統的分界點間距,該峰值輸出是由激勵中的隨機成分引起的.當激勵中心頻率小于15 Hz時,分界點間距d0左右兩側分別出現具有雙穩和單穩振動特性的峰值電壓,該兩峰值是由激勵中心頻率與系統等效線性固有頻率一致引起的.且在激勵中心頻率較小時,兩側的峰值間距與d0非常接近,在實驗分辨率下無法明顯體現出來.當中心頻率大于15 Hz且小于40 Hz時,系統僅在分界點間距d0左側出現1個具有雙穩振動特性的峰值電壓.當中心頻率超過40 Hz后,系統不存在由激勵中心頻率與系統等效線性固有頻率一致引起的峰值電壓輸出.這些實驗結果驗證了理論分析及模擬結果的正確性.
為了進一步理解實驗中系統的振動響應情況,圖30給出了激勵中心頻率為13 Hz時,激振臺的加速度響應及其頻譜圖,圖31給出了該激勵條件下,系統在3個峰值間距(d0=18 mm,dL=16 mm,dR=24 mm)下的位移-時間圖.由圖31可知,系統在3個峰值間距下的振動狀態分別是:雙穩躍遷振動、雙穩單勢阱內振動、單穩振動,與理論分析中fc=40 Hz時3個峰值間距下系統的振動響應情況相符合.
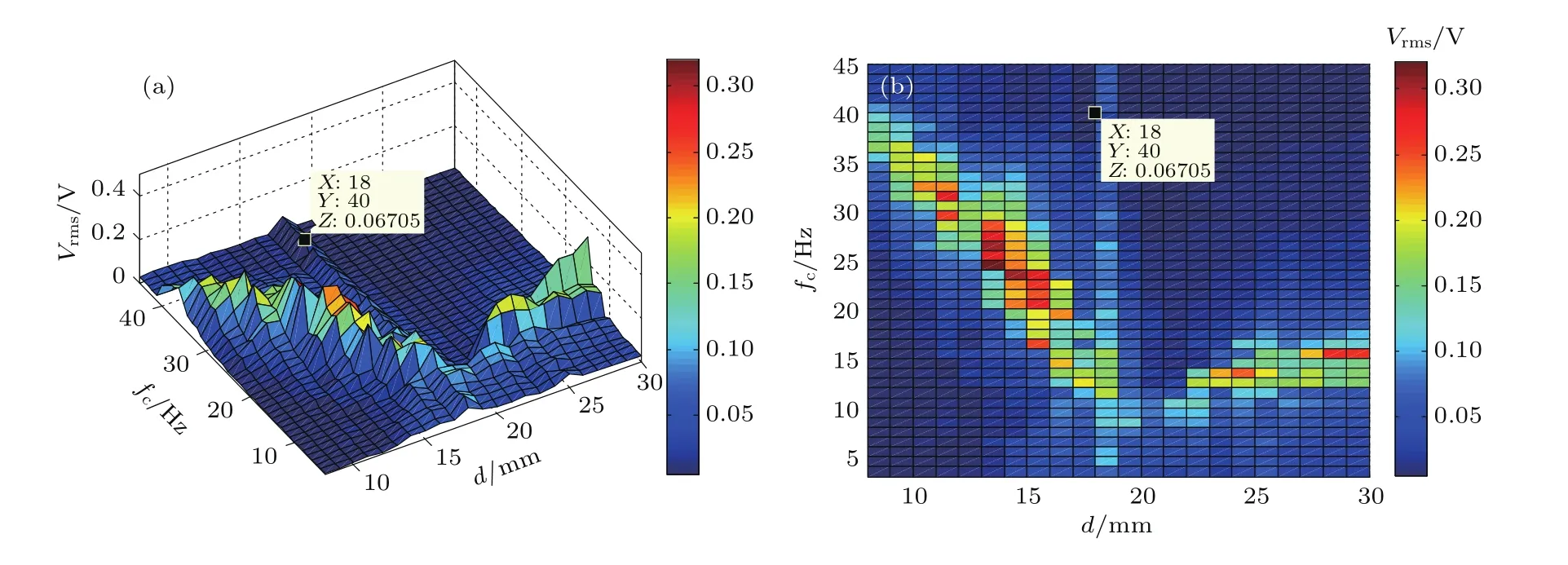
圖29 輸出電壓Vrms隨磁鐵間距d和窄帶中心頻率fc的變化,其中激勵強度和帶寬分別為D=0.2和γ=5 Hz;圖(b)是圖(a)的俯視圖Fig.29.Dependence of output voltage Vrmson magnet spacing d and the center frequencies fcwhile D=0.2 and γ=5 Hz.Panel(b)is the top view of panel(a).
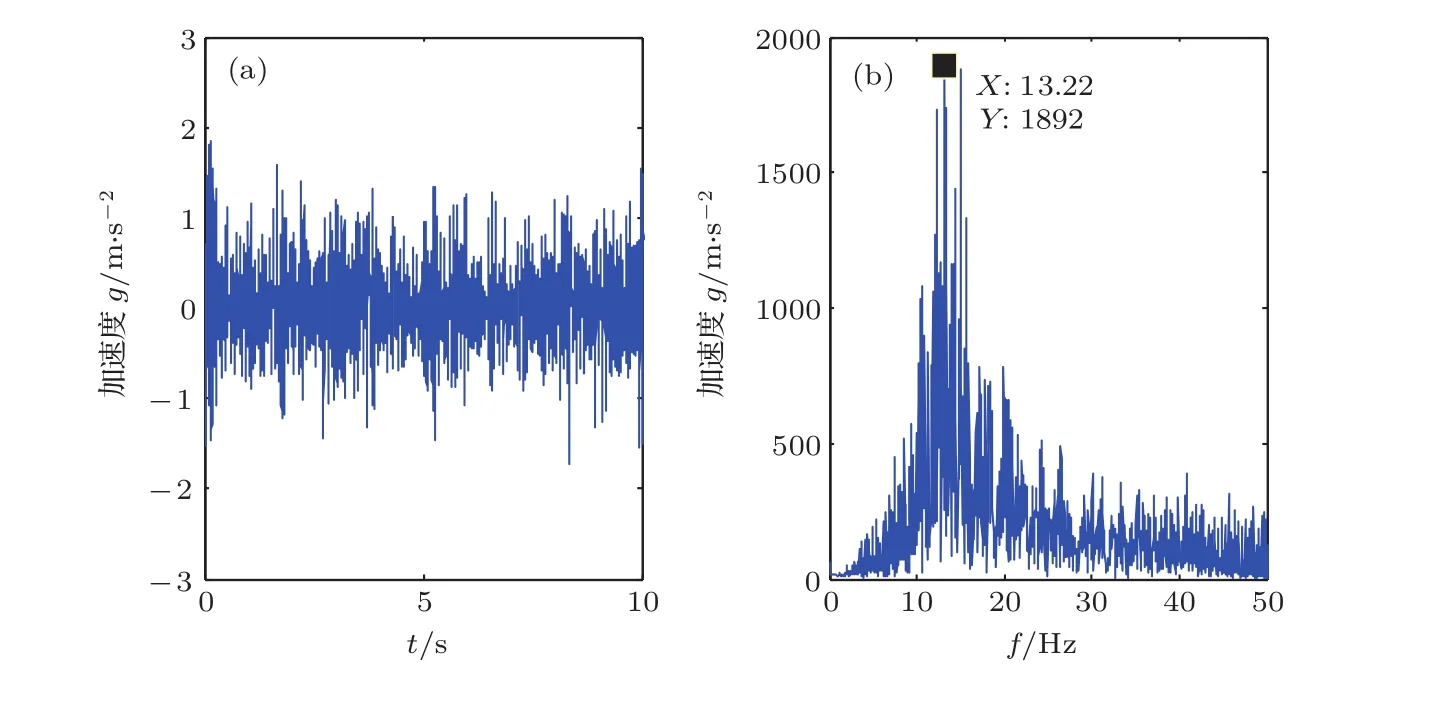
圖30 激勵中心頻率fc=13 Hz時,激振臺的激勵狀態 (a)加速度響應;(b)加速度頻譜Fig.30.Excitation state of the vibrator when fc=13 Hz:(a)Acceleration response;(b)acceleration spectrum.
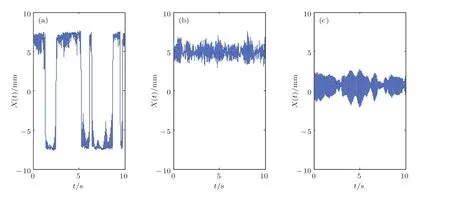
圖31 激勵中心頻率fc=13 Hz時,不同峰值間距下系統的位移響應 (a)d0=18 mm;(b)dL=16 mm;(c)dR=24 mmFig.31.Displacement response under different magnet spacings when fc=13 Hz:(a)d0=18 mm;(b)dL=16 mm;(c)dR=24 mm.
7 結 論
本文以雙穩壓電懸臂梁能量采集系統為研究對象,探討了不同中心頻率窄帶隨機激勵下系統的響應和能量采集特性.研究結果表明:對于一定帶寬的窄帶隨機激勵,1)系統始終存在一個可產生響應峰值的磁鐵間距(稱為分界點間距)d0,這一特性類似于寬頻帶隨機激勵的雙穩系統在最優磁鐵間距處產生響應峰值的雙穩響應特性;2)當激勵頻率由小到大依次變化且不超過某個頻率值時,系統分別存在另外兩個或一個不同磁鐵間距(d1和d2或d1)也能使系統響應達到峰值電壓,且系統這種峰值輸出電壓間距隨中心頻率變化的規律,是與系統的等效線性固有頻率隨磁鐵間距的變化規律一致;3)磁鐵間距d1和d2處的系統峰值輸出電壓,是由系統在其等效線性固有頻率處誘導產生雙穩或單穩“共振”形成的;4)由于在一定帶寬的窄帶激勵下,系統響應存在3個峰值間距d0,d1和d2,因此對于實際環境變化的窄帶激勵,可根據具體工況將能量采集系統的磁鐵間距進行合理安排,以實現更好的機電能量轉換.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32