煤礦救援機器人及本安驅動系統的應用研究
2018-12-04 03:01:36溫學雷
中國煤炭 2018年11期
溫學雷
(中煤科工集團重慶研究院有限公司,重慶市沙坪壩區,400037)
我國是煤礦事故多發國家,各種煤礦事故導致了嚴重的人員傷亡和巨大的經濟損失。如何在事故發生后實施及時有效的救援是值得深入思考的問題。據我國原國家安全生產監督管理總局對全國67個煤礦救援隊的裝備需求調查表明,基本提出了對煤礦井下救援機器人的迫切需求,尤其是在0區環境(即連續出現或長期出現爆炸性氣體混合物的環境)中代替救援人員進入災區,對保障救援人員的安全及提高救援成效具有重大意義。鑒于此,近年來國內外不斷加大對煤礦救援機器人的研制力度,并推出多種機器人樣機,由于絕大多數采用隔爆驅動(用以保障機器人的動力需求),因此導致機器人無法滿足在0區環境中的使用條件。基于此,本文通過分析煤礦救援機器人國內外研究現狀及應用,提出一種在本安驅動下提升機器人動力性能的方法,并進行了試驗研究。
1 煤礦救援機器人研究現狀
國外針對礦山救援機器人的研究始于20世紀80年代,經歷了前期研究,目前正進入實用化研究階段。典型的主要有澳大利亞研制的第一臺煤礦救援機器人Australia CSIRO Numbat;新西蘭惠靈頓維多利亞大學研制的煤礦井下救援飛行器以及由美國Sandia國家實驗室研制成功的煤礦救援機器人Gemi-scout。上述機器人均屬隔爆防爆等級,無法在0區環境使用。
相對國外,我國在煤礦救援機器人方面研究起步較晚,但進步較快。如中國礦業大學研制的國內首臺礦山救援機器人CUMT-I和中信重工開誠智能裝備有限公司的煤礦井下探測機器人,上述兩款救援機器人依然為隔爆防爆等級。中煤科工集團重慶研究院有限公司于2014年研制出了國內首款本安防爆型救援探測機器人,首次實現煤礦救援機器人可在0區環境使用,然而動力性能較弱,因此造成機器人行走及越障能力較差,實用性較低。
2 煤礦本安驅動機器人應用及分析
據調研,目前尚未有本安驅動救援機器人國內外的成功應用案例,分析主要原因如下:針對0區環境的救援,未達到本安防爆等級的機器人禁止投入使用;滿足本安防爆要求的救援機器人因動力性能不足,雖然符合0區環境中使用條件,卻無法在實際礦井環境中行走及越障,基本不具備實用性。上述情況造成了針對0區環境中的救援無實用的救援機器人。因此,如何在本安驅動條件下提升機器人動力性能成為煤礦救援機器人的關鍵問題,直接制約機器人的實用性。
3 本安驅動系統研究及試驗
3.1 本安驅動系統總體設計
依據《爆炸性環境第4部分:由本質安全型“i”保護的設備》(GB3836.4-2010)要求,本安電路最大功率不超過33 W。基于此,本文提出“分功合流”思想,設計本安驅動系統總體方案如圖1所示。
采用多個不超過33 W的本安驅動單元通過液壓并聯利用流量合成為大功率本安驅動系統,為煤礦救援機器人提供動力驅動。依據液壓原理可知,理論上各支路壓力與總油路壓力相同,各支路流量之和與總油路流量相同,但實際由于系統阻力損失,存在合成效率。因此,本安驅動系統的功率合成情況取決于液壓系統的流量合成效率。
3.2 本安驅動單元設計
本安驅動單元主要包括電池、電機、液壓泵及其控制電路等。根據《爆炸性環境第4部分:由本質安全型“i”保護的設備》(GB3836.4-2010)中Ⅰ類電感線路計算確定關鍵元器件參數為:電池電壓為24 V,電機電感為110 μH,電機電壓為24 V,電機額定轉速為1500 r/min,電機額定扭矩為73 N·m,液壓泵排量為12 mm3,液壓泵額定工作壓力為15 MPa,液壓泵啟動扭矩為10 N·m。依據檢驗標準進行了電火花試驗,試驗結果滿足本安防爆要求。

圖1 本安驅動系統總體方案
3.3 基于本安驅動的液壓合流系統設計
依據電機及液壓泵參數,確定液壓系統工作壓力為15 MPa,每個本安驅動單元為一個支路,通過并聯后將各支路流量合成,設計本安驅動系統液壓合流原理如圖2所示。

1-冷卻系統;2-液壓泵;3-電機;4-卸荷閥;5-數顯壓力表;6-數顯流量計;7-調壓溢流閥圖2 本安驅動系統液壓合流原理
各支路設置均設置單向閥、數顯流量計及數顯壓力表,用于測量各支路流量及壓力,總路上設置壓力調節閥,用于系統壓力調節。
3.4 試驗平臺搭建及驗證
依據本安驅動系統液壓合流原理搭建試驗平臺,該試驗平臺設計了5個本安驅動單元支路進行合流試驗,設置電機轉速1000 r/min,調節液壓系統壓力為15 MPa,待系統運行10 s后,每間隔10 s測量各支路及合成流量數據。本安驅動系統測試原理機如圖3所示,本安驅動系統液壓合流測試結果如圖4所示。

圖3 本安驅動系統測試原理機
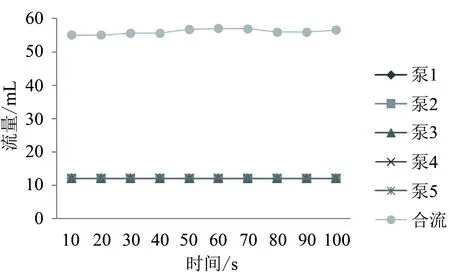
圖4 本安驅動系統液壓合流測試結果
測量的各支路及總路壓力數據如圖5所示。

圖5 本安驅動系統壓力測試結果
由圖5可以看出,總油路壓力與各支路壓力基本保持一致,可忽略壓力損失。計算出該系統在5路合成工況下流量合成效率如圖6所示。
由圖6可以看出,由試驗測試結果表明,該系統是本安條件下提升動力性能的有效方法,合理可行。
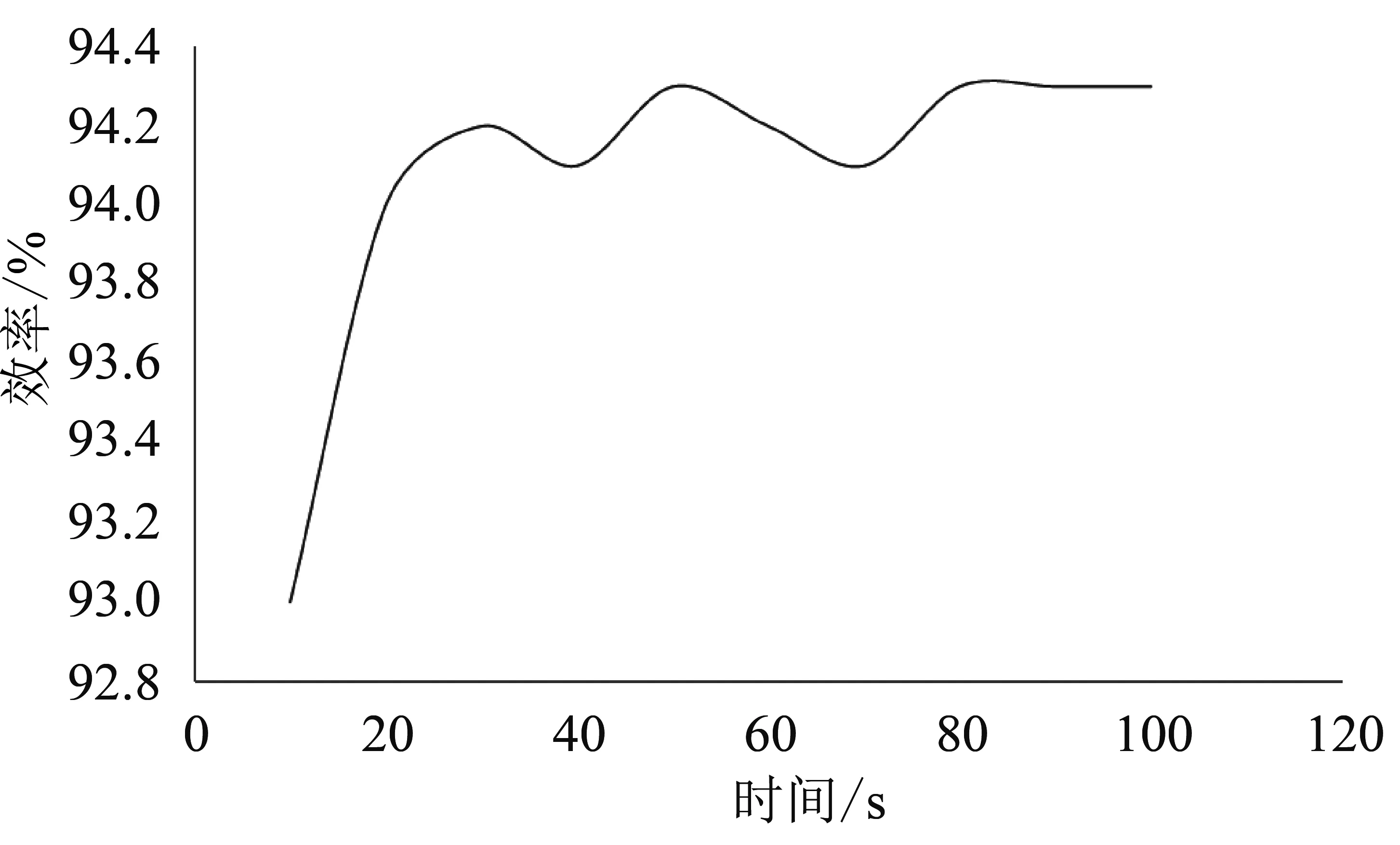
圖6 本安驅動系統合成效率
4 結論
(1)煤礦救援機器人的研究目前正處于試驗樣機向實用化研制的階段。
(2)本質安全條件下提升救援機器人的動力性能是針對0區環境的救援機器人的關鍵問題。
(3)通過試驗研究得知,在五泵并聯前提下,基于液壓合流的本安驅動系統合流效率達94%,驗證了該方法是本質安全下提升機器人動力性能的有效解決方案。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年4期)2016-05-04 04:00:23
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
河南科技(2014年8期)2014-02-27 14:08:07