無人地面車輛車道級路徑引導方法
2018-12-07 09:12:40楊強榮王美玲于華超
西安電子科技大學學報 2018年6期
楊強榮,王美玲,于華超
(北京理工大學 自動化學院,北京 100081)
無人地面車輛(以下簡稱無人車)是未來交通系統(tǒng)與未來作戰(zhàn)系統(tǒng)的重點研究對象之一,其成果對于人類社會的進步具有舉足輕重的意義.近年來,隨著無人車在智能交通系統(tǒng)、輔助駕駛、智能運輸?shù)阮I域的廣泛應用,對車載電子導航地圖也提出了更高的要求.因此,基于車道級電子導航地圖的相關研究便提上了日程,例如高精度電子地圖的構建[1-3]、道路建模[4]、基于先驗地圖信息進行定位[5-8]和基于先驗地圖的地圖匹配等[9].
針對上述需求,筆者通過對多傳感器信息的融合,提出了一種車道級電子地圖的構建方法,并以該地圖為基礎,結合無人車的運動規(guī)劃技術和跟蹤控制技術提出了一種適用于無人車的精確路徑引導方法,為車輛在結構化道路環(huán)境下的自主行駛提供了保障.
1 數(shù)據(jù)采集與處理
1.1 IN2BOT數(shù)據(jù)采集平臺
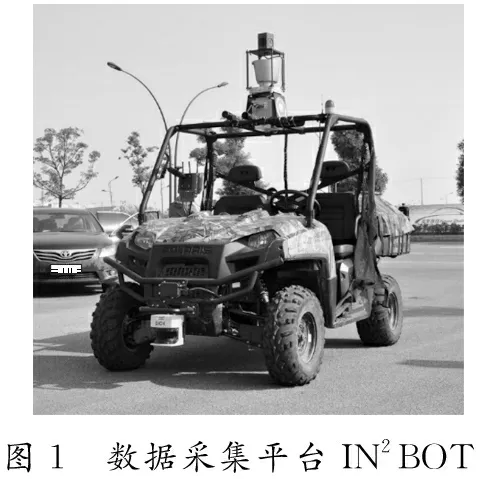
圖1所示的IN2BOT無人地面平臺為文中數(shù)據(jù)采集平臺.該平臺是團隊對美國北極星全地形車改裝而成,具有檔位、油門、剎車的自動控制功能,并可以提供構建車道級電子地圖所需要的傳感器數(shù)據(jù),其中包括定位數(shù)據(jù)、全景圖像數(shù)據(jù)、交通燈圖像數(shù)據(jù)、交通標志圖像數(shù)據(jù)和激光雷達數(shù)據(jù).平臺配備的傳感器如表1所示.
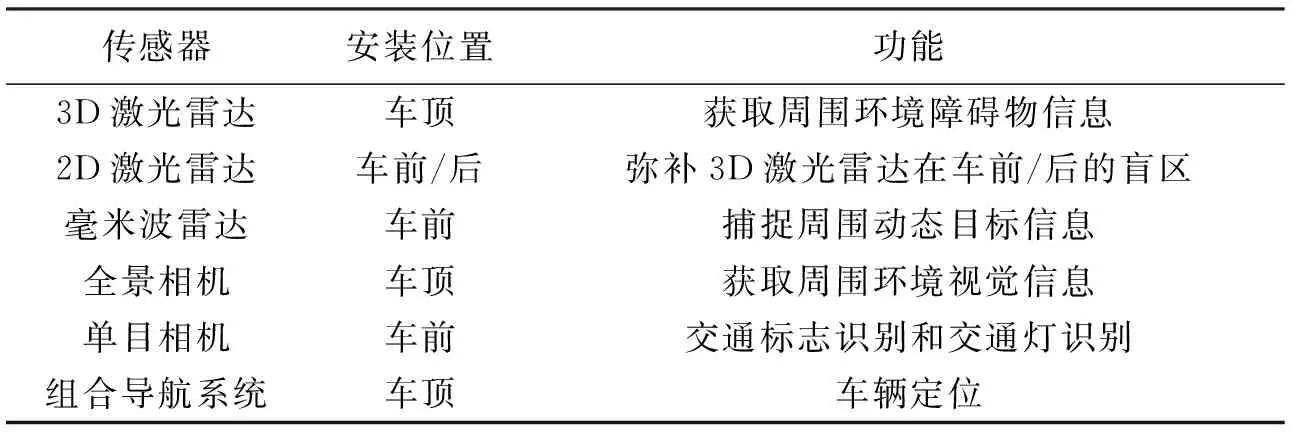
表1 實驗平臺傳感器配置

圖2 數(shù)據(jù)采集與處理方案
1.2 數(shù)據(jù)采集方案
高精度的地理數(shù)據(jù)是構建高精度電子地圖的基礎,根據(jù)對不同地理數(shù)據(jù)的采集需求和常用地圖數(shù)據(jù)采集傳感器配置的分析,文中提出了如圖2所示的數(shù)據(jù)采集方案.數(shù)據(jù)采集與處理主要包括以下4部分:
(1) 采集全景圖像.構建高精度地圖需要采集全景圖像信息作為地圖底圖.在采集全景圖像之前首先需要通過標定板對全景攝像頭進行標定,并基于逆投影變換(Inverse Projection Mapping, IPM)獲得全景俯視圖;另外,后期處理時,為了對不同的全景圖像進行拼接,需要對圖像的采集位置進行標識,文中以二維碼的形式在圖像右下角標注其位置信息,全景圖像的采集和處理流程如圖3所示.

圖3 全景圖像的采集和處理流程
(2) 采集定位數(shù)據(jù).構建車道級電子地圖要求定位數(shù)據(jù)能夠區(qū)分不同車道,因此定位數(shù)據(jù)的精度至少是分米級.而目前應用最為廣泛的全球衛(wèi)星定位系統(tǒng)(Global Positioning System, GPS)單點定位精度一般在米級以上.為此,文中采用了差分定位技術,即在一個已知位置的平臺上架設差分基站,基站通過移動通信模塊向數(shù)據(jù)采集平臺傳輸實時差分信息,由此可使定位精度達到厘米級.
(3) 估計交通燈和交通標志位置.在通過單目相機得到交通燈和交通標志的圖像之后,基于多目標的定位和跟蹤算法獲取其位置信息[10].
(4) 確定道路邊界信息.通過激光雷達采集周圍環(huán)境點云數(shù)據(jù),并通過多重特征Hough變換便可確定道路邊界信息.
2 車道級電子地圖的構建
2.1 構建電子地圖
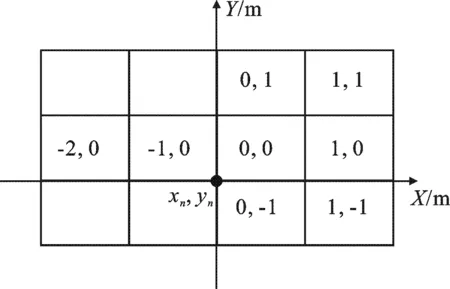
圖4 設計的圖像坐標系
下面介紹如何利用帶有位置信息的全景圖像序列構建車道級電子地圖.首先,由于采集到的電子地圖數(shù)據(jù)覆蓋范圍廣、數(shù)據(jù)量大,使用常規(guī)的圖像拼接方法無法直接將全景圖像拼接成一張圖像.因此,數(shù)據(jù)采集區(qū)域被劃分成如圖4所示的網格區(qū)域.其中一個網格的大小為 1 620 m× 360 m (27 000像素× 6 000像素),原點坐標(x0,y0)根據(jù)數(shù)據(jù)采集區(qū)域的坐標范圍選定.當讀入一幀新的圖像時,根據(jù)該圖像記錄的位置信息(xi,yi)和車的航向信息φi將圖像旋轉平移到圖4所示坐標系中.接著,計算該圖像所在的網格序號(i,j),并判斷該序號是否與上一幀圖像的序號相同.如若相同,則將兩幅圖像按照對應的位置關系拼接在一起;否則,首先將上一幀圖像的拼接結果保存,并判斷當前幀圖像所在的網格之前有沒有保存好的圖像.如果之前該網格有保存好的圖像,則將該圖像導入內存,并將該圖像與當前幀圖像按照位置關系拼接在一起.而如果之前該網格沒有保存好的圖像,則在內存里新建一片區(qū)域表示當前網格,并將當前幀圖像貼到對應位置.最后,重復上述過程直到處理完所有采集到的全景圖像.上述算法得到的是若干張對應相應網格的圖像,這些圖像還需要按照相應的網格序號拼接成一張圖像作為車道級電子地圖的底圖.
在獲取到高精度底圖之后,便可根據(jù)交通規(guī)則和車道的轉向信息來構建電子地圖.通常,對于雙向四車道或更多車道的道路來說,根據(jù)交通規(guī)則各車道的屬性不完全相同.在一般情況下,內側車道不具有向右轉的屬性,外側車道不具有向左轉的屬性.因此,需要根據(jù)不同車道間的轉向屬性建立不同路段對應車道間的連接關系.另外,為了保證車輛在通過路口時能夠按照交通規(guī)則行駛在正確的車道上,建立同一道路上不同車道間的連接關系也很有必要.因此,筆者通過對電子地圖添加換道點來建立同向行駛車道間的連接關系.
2.2 創(chuàng)建屬性表
為了適應無人車的應用要求,電子地圖中的地理數(shù)據(jù)除了具有精確的位置信息之外,還需要包含準確的屬性信息來反映每個地理對象的具體意義.因此,在生成精確的電子地圖和對應的車道后,要為不同的地理對象建立屬性表.
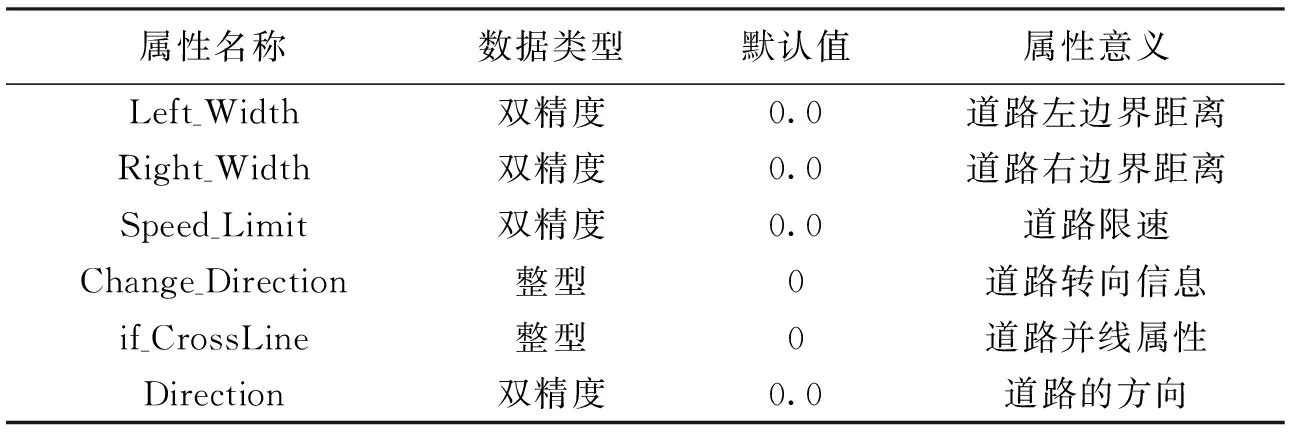
表2 “道路”數(shù)據(jù)的屬性表
3 路徑引導
無人車典型的應用場景是在給定任務點后,通過路徑規(guī)劃得到全局最優(yōu)路徑,并實時根據(jù)檢測到的環(huán)境信息修正軌跡,從而快速并且安全地從起點出發(fā)到達終點.因此,如何通過任務點規(guī)劃得到全局最優(yōu)路徑和根據(jù)實時檢測到的環(huán)境信息對全局最優(yōu)路徑進行修正是無人車進行應用所必須解決的問題.
3.1 全局路徑規(guī)劃
文中提出的車道級全局路徑規(guī)劃算法主要包括以下幾個步驟:
(1) 路網抽象.在路網抽象這個過程中,將原本帶有寬度的車道抽象為線段,將交叉口抽象為頂點.這樣具有真實物理屬性的城市交通網絡就被抽象為一個由點和線段組成的有向加權網絡G(V,L),其中V、L分別為頂點集合和車道集合,車道集合L對應的路阻矩陣為W.
(2) 任務點匹配.由于給定任務點的精度不高,直接使用距離匹配可能會將其匹配到錯誤的頂點上,因此需要結合任務點的屬性和車道的屬性進行匹配.首先,以任務點所在的位置為圓心構建一個圓形的緩沖區(qū)域,并將所有與該緩沖區(qū)域相交的車道作為候選車道.接著,結合前后任務點和每個候選車道的Direction屬性,刪除那些與當前任務點方向差別較大的車道.然后,讀取當前任務點的轉向信息,并將任務點匹配到對應的車道上.最后,得到該車道對應的節(jié)點并加入關鍵頂點集合VL.
(3) 路阻標定.路阻標定就是給路阻矩陣W賦初值的過程.依據(jù)所選用的最優(yōu)路徑計算方法不同,W標定的對象也不同(如路段長度、路段行程時間).文中算法選定每條車道的長度對W賦值,即
wi,j=di,j,
(1)
其中,wi,j是頂點i和頂點j之間的路阻,而di,j是車道i,j的長度,如果i,j?L,則di,j= ∞.
(4) 求解最優(yōu)路徑.由于城市道路網絡的頂點數(shù)量巨大而且每一個任務點都必須按順序依次經過,因此傳統(tǒng)的路徑規(guī)劃算法必須進行n-1 次的全局搜索(n為VL中頂點的數(shù)量,即需要對VL中的每兩個相鄰的點進行規(guī)劃),會耗費大量的時間.因此,文中算法對每一次搜索的范圍進行限制,即將所有與起點s和終點e的距離之和小于2ds,e(ds,e為起點到終點的距離)的頂點加入搜索集合Vs,而其他的頂點則不予考慮.并且每一次搜索的步驟如下: 初始化時,令 dist(s)= 0,dist(i)= ∞ (i≠s且i∈VS).接著每次從Vs(非空集)中選取這樣的一個頂點u,它的 dist(u) 最小.將選取出的u點作為搜索的起點,對于其他還在Vs集合內的頂點v,若u,v∈L,且 dis(u)+wu,v< dis(v),則更新dis(v)為 dis(u)+w(u,v),同時從Vs中將u刪除,直到Vs為空集或者到達終點e時終止.
3.2 局部路徑修正
在得到上述全局最優(yōu)路徑后,無人車就可根據(jù)該路徑從起點行駛到終點.但是,當前方最優(yōu)路徑上出現(xiàn)障礙物時,車輛必須通過局部路徑修正來避開障礙物.文中提出的局部路徑修正算法主要包括構建代價地圖和綜合代價規(guī)劃.其中代價地圖中重點考慮了路網信息、障礙物信息和車道線信息.
代價地圖主要包括背景代價地圖、障礙物代價地圖和車道線代價地圖.其中背景代價地圖由上述全局最優(yōu)路徑得到,全局最優(yōu)路徑代價最低,逐漸向兩側提高.障礙物代價地圖由激光雷達點云數(shù)據(jù)得到.首先,基于激光雷達數(shù)據(jù)提取出可通行區(qū)域.接著,為了提高車輛行駛的安全性,對可通行區(qū)域進行膨脹和高斯模糊操作,并將兩種操作的結果進行疊加就得到了障礙物代價地圖.車道線代價地圖由識別的車道模型和最優(yōu)路徑所在的車道所決定,最優(yōu)路徑所在的車道代價最低,其他車道中心線的代價逐漸向兩側提高,而且車道線上的區(qū)域代價設為最高.再進行高斯模糊操作,使得車道線處于代價峰值,而車道中心線處于代價低谷.
在得到上述代價地圖之后,用301個相隔 0.4 m 的點來描述當前道路的每一條車道,并根據(jù)式(2)計算第i條車道的總代價,選取代價最低的車道作為局部路徑的修正結果.
(2)

4 實驗驗證
筆者以江蘇省常熟市智能車研發(fā)中心作為試驗場地對提出的車道級路徑引導方法進行試驗驗證.圖5給出了全局規(guī)劃的結果.由圖5(a)可以看出,得到的全局規(guī)劃路徑平滑地依次通過了各個任務點,為無人車地行駛提供了一個合理的參考.由圖5(b)和(c)對比可得,當無人車在下一個路口需要右轉時,文中算法規(guī)劃的路徑會根據(jù)交通規(guī)則指導車輛向右并道進入右轉車道,為右轉做好準備.而傳統(tǒng)的Dijkstra算法的規(guī)劃路徑并沒有進行換道,而是沿著直行道繼續(xù)行駛并完成右轉,這明顯違反了城市的交通規(guī)則.由此可以看出,文中提出的車道級路徑引導方法很好地反映了城市的交通規(guī)則.
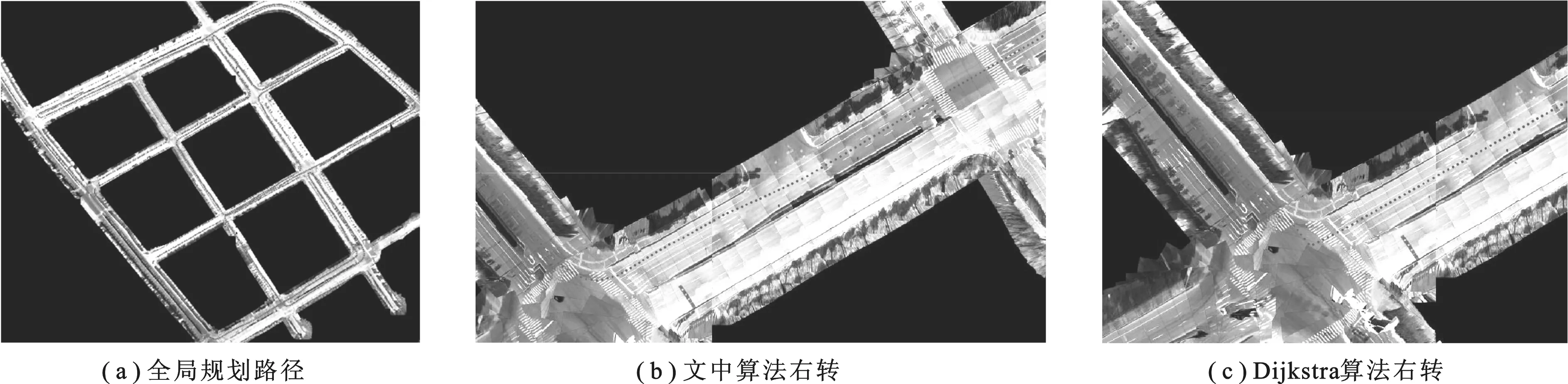
圖5 全局規(guī)劃路徑結果
最后,為了驗證文中局部路徑修正算法的性能,在無人車行駛軌跡上隨機布置了兩輛靜態(tài)障礙車輛,車輛的縱向間距為 15 m,橫向間距為 3 m.在此場景下,無人車需要通過左右各一次換道才能順利通過.圖6(a)
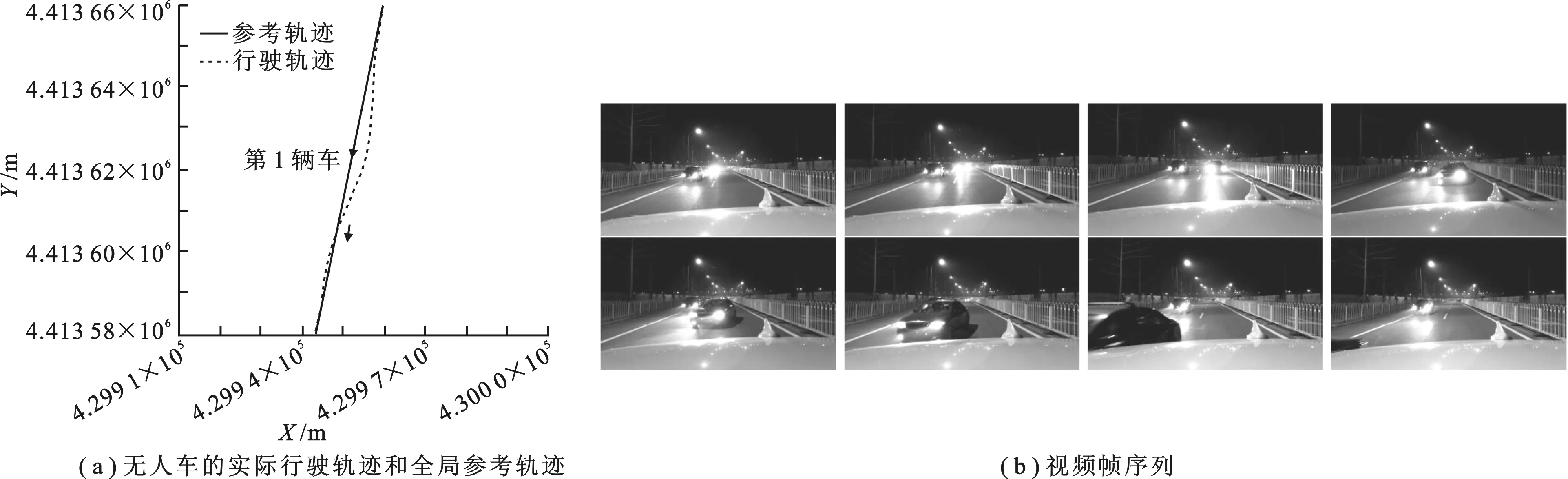
圖6 局部路徑修正結果
給出了無人車的實際行駛軌跡和全局參考軌跡.由圖6(a)可以看出,由于無人車前方障礙物的存在,穿過障礙車的備選路徑的代價遠大于其他路徑,而在車道線代價的引導下,無人車選擇了首先向左并線,再向右并線的路徑,路徑規(guī)劃結果安全合理.圖6(b)給出了上述場景無人車行駛過程的視頻幀序列.
除在上述實驗場地進行跑車實驗以外,搭載了文中構建的高精度地圖和高精度路徑引導算法的無人車還參加了2012~2016年的中國智能車未來挑戰(zhàn)賽.其中在2016年的比賽當中,該平臺全程無干預地完成了比賽任務,并獲得了優(yōu)異成績.
5 結 束 語
隨著無人車在智能交通系統(tǒng)、輔助駕駛等領域的應用,高精度電子地圖的重要性日益凸顯.為此,筆者通過對多傳感器信息進行融合提出了一種車道級電子地圖的構建方法,并基于該地圖提出了一種適合無人車在結構化道路環(huán)境下行駛的車道級路徑引導方法.跑車實驗和中國智能車挑戰(zhàn)賽比賽結果表明,文中提出的高精度電子地圖和路徑引導方法能滿足無人車在結構化道路環(huán)境下的需求,給無人車的安全快速駕駛提供了可靠的指導和保障.但是,該方法對于無人車在復雜環(huán)境下的路徑引導只是一個初步的研究,還有許多問題亟待解決,例如: 筆者提出的算法的道路還是由手工繪制生成,效率很低.如何使用采集到的多傳感器數(shù)據(jù)來自動生成道路是下一步有待解決的問題.
