柔性可穿戴的腕關節運動角度傳感器
2018-12-12 13:21:08李敏何博徐光華陳佳洲郭文亮鄭翔張鑫
西安交通大學學報 2018年12期
關鍵詞:測量
李敏,何博,徐光華,陳佳洲,郭文亮,鄭翔,張鑫
(西安交通大學機械工程學院,710049,西安)
雙手在人類日常生活中有重要意義[1]。腕關節是人體復雜的力學關節之一,實現屈曲和撓尺偏兩種運動,對手功能的行使起到重要作用[2],因此監測腕關節的運動狀態有重要的實際應用價值。在醫療康復領域,腕關節的運動姿態監測能夠指導醫生對患者的治療和后續康復訓練計劃的制定,但目前缺乏對運動姿態的監測[3-4];在互動娛樂領域,腕關節角度的確定便于計算手部在關節坐標系中的實際位置;機器人表面傳感器的發展也有助于機器人的精確控制[5]。
現階段人體運動監測傳感器根據原理分為電磁式、機械式、光學式、線纜式和基于視頻圖像的運動監測設備。Ascension和Polhemus等研究的電磁式運動監測系統包括發射器、多個監測傳感器、中央處理單元和軟件控制系統[6-7]。該類測量系統對監測環境要求嚴格,受場景中的金屬影響較大,且存在總體體積大、監測傳感器必須固定在被試身上、妨礙被試者做復雜運動等缺點,同時設備昂貴、數據采樣率和精度較低,不能滿足快速運動的需求。文獻[8]中機械測量裝置由固定在人體主要關節的剛性連桿組成,在轉動關節處放置角度傳感器,通過人體的運動來驅動監測系統工作。此類傳感器采用機械結構,體積大、質量重,對被試的動作阻礙較大。VICON、NDI Polaris Spectra等光學運動捕捉系統是將Marker點貼在被試身上,通過追蹤標記點的運動軌跡來完成監測任務[9-10]。該類系統存在自遮擋問題,容易造成數據丟失,且后續需進行大量的數據處理。數據手套[11]主要用于手部位姿的監測,目前已經開發出基于壓電效應、光電效應和電磁效應等不同原理的數據手套[12-14],但數據手套的價格較高,且主要監測手指的運動狀態,忽略腕的運動姿態感知。以KINECT為代表的深度攝像頭的問世為圖像處理的方式提供新的發展思路[15],但存在自遮擋和精度低的缺點。
近年來,用于測量關節角度運動的光纖傳感器發展迅速。Silva等人提出光纖與織物相結合的設備來測量肘關節的彎曲[16],但該穿戴設備與人體關節部位未能緊密貼合時有較大的測量誤差。Sareh等人應用光纖宏彎損耗的原理,將3組光纖平行分布在圓柱形柔軟機器人的側表面以檢測該機器人軸線的彎曲角度[17],試驗證明該傳感器重復性好,但誤差大。Augustin等分別將光纖宏彎傳感器、布拉格光纖、反射式光電傳感器3種傳感器編織在織物上,通過測量呼吸時腹圍的變化,監測呼吸作用在磁共振成像環境中的潛在影響[18]。Back和Xie Hui等分別利用雙光纖反射式光強調制機理,設計用于微創手術觸診的偽觸覺傳感器[19-20],該類傳感器具有結構簡單、容易制造和小型化,且重量輕、可滅菌、兼容磁共振環境的優點。考慮光纖經過編織后的傳感器具有伸展壓縮的特性,且對溫度不敏感、不受電子干擾的優點,設計并制作靈敏度高、成本低的光纖傳感器有很大的市場價值。
因此,本文利用光纖的宏彎損耗特性設計傳感器測量腕關節掌屈運動角度。設計時,首先選擇合適的光纖及最小彎曲半徑,以此為基礎制作硅膠模塊,開展基于皮膚伸縮的關節角度監測試驗和人造皮膚模塊的拉伸試驗,最后分析設計人造皮膚模塊穿戴裝置并進行標定試驗,以驗證該監測裝置的可用性。
1 手腕運動監測裝置的總體設計
1.1 手腕模型分析
硅橡膠人造皮膚監測裝置需要直接貼合在人體手腕上,為確保設計準確性和監測高效性,需對手腕的解剖學結構組成和運動形式進行分析。
手腕是連接人體手掌和小臂的重要部位,由骨骼、韌帶、關節,肌肉和肌腱組成。腕部靠近小指的一側稱為尺側,靠近拇指的一側稱為橈側。腕關節前后、兩側均有韌帶,可做屈、伸、展和收運動。腕內收是掌向橈側屈曲,腕外展指掌向尺側彎曲,背伸指手掌向手背側面伸展,掌屈是掌向手心面屈曲。其中,由于橈腕掌側部分的韌帶較為堅韌,因此掌屈的幅度要小于背伸的彎曲角度。手腕的掌屈和背伸運動配合肘關節運動能夠滿足人們基本的生活需求。因為監測掌屈運動的設備布置在小臂相反的方向即可監測背伸運動角度,所以本文以手腕的掌屈運動為研究目標。本文中手腕監測的0°定義為人手手背和小臂在同一條直線上的狀態(圖1中虛線部分所示的腕關節姿態)。由于大部分測試者的掌屈運動范圍為0°~60°,因此本文的測量范圍確定為60°。
1.2 基于皮膚伸縮的關節角度監測原理
本文腕關節掌屈運動監測原理如圖1所示。腕關節由虛線位置轉動到實線位置時,皮膚表面的B點運動到C點,加大了與A點的距離。本文通過測量皮膚表面固定點A、B之間的距離來間接實現關節運動角度的監測。

圖1 關節運動角度監測原理
測量距離的裝置是以光纖宏彎損耗為機理的硅膠模塊。光纖宏彎損耗是指在光纖彎曲時,光束在光纖內部不滿足全反射條件,折射到包層和保護層從而造成光強損耗的現象。
本文將光纖嵌入到硅膠模型后與腕關節貼合,使腕關節做掌屈運動時,關節兩側的固定點之間的距離轉換為硅膠模型的伸縮,并引起光纖宏彎損耗,影響光強的變化。通過測量光強的大小來間接確定關節運動角度。
1.3 腕關節運動角度監測裝置樣機設計
1.3.1 硅膠模型的制作 在制作硅膠模型時,需要預先將光纖布置在未固化的硅橡膠中,因此需要設計澆筑模具以固定光纖。
本文選用的光纖為三菱SH1001系列。光纖由纖芯和包層組成,纖芯材料為聚甲基丙烯酸甲酯樹脂,纖芯直徑為217~263 μm。包層由氟化聚合物構成,外徑為1 μm。該光纖包層的反射率為1.49。研究表明,該型號光纖在彎曲半徑為5 mm以上、10 mm以下會發生宏彎損耗[17],因此本文設定光纖的最小彎曲半徑為5 mm,以不損害光纖的前提下保證光纖傳感器的靈敏度。
為使硅橡膠液體能夠均勻流動到模具中,本文對布線引導槽預留切口。同時,在模具表面設計陣列的柱狀凸起結構,使后續制備的模塊中分布小孔,保證硅膠模塊的伸縮性和穿戴時手部良好的透氣性。最終設計的結果如圖2所示。
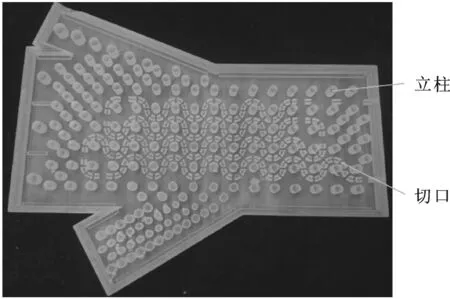
圖2 硅膠模型模具

圖3 制作硅膠模型的主要材料和設備
硅膠模型采用Ecoflex00-30系列硅橡膠材料,將A、B兩種質量密度均為1.07 g/mm3的材料等比例混合,在25 min內將混合好的液體澆筑到模具中。用SolidWorks軟件計算澆筑需要的硅膠體積為62 576.13 mm3,需要每種材料的質量為33.49 g。制作設備如圖3所示。制作時先將光纖固定在模具的引導槽中,考慮杯壁上會殘留部分材料,分別稱取A、B材料35 g并充分攪拌,由針管將混合均勻后的材料澆筑到模具中。然后,把盛有液態硅橡膠的模具放入真空裝置中,以減少固化成型后硅膠模塊的氣泡和孔洞。觀察到沒有氣泡冒出時,將模具從真空裝置中拿出,放在室溫自然固化4 h后從模具中取出硅膠模塊。
1.3.2 穿戴裝置的設計與制作 硅膠模塊制備完成后,需要設計穿戴裝置,以便將硅膠模型固定于手腕上,物理樣機如圖4所示。本文采用護肘與人體手臂直接貼合,設計指環和夾持裝置帶動硅膠模塊做伸縮運動。光纖放大器固定座將光纖傳感器與護肘貼合。其中光纖傳感器采用基恩士公司生產的FS-N11MN光纖傳感器,輸出電壓為1~5 V。同時該傳感器自帶波長為630 nm的光源,具有抗干擾,功耗低、體積小且重量輕的特點。
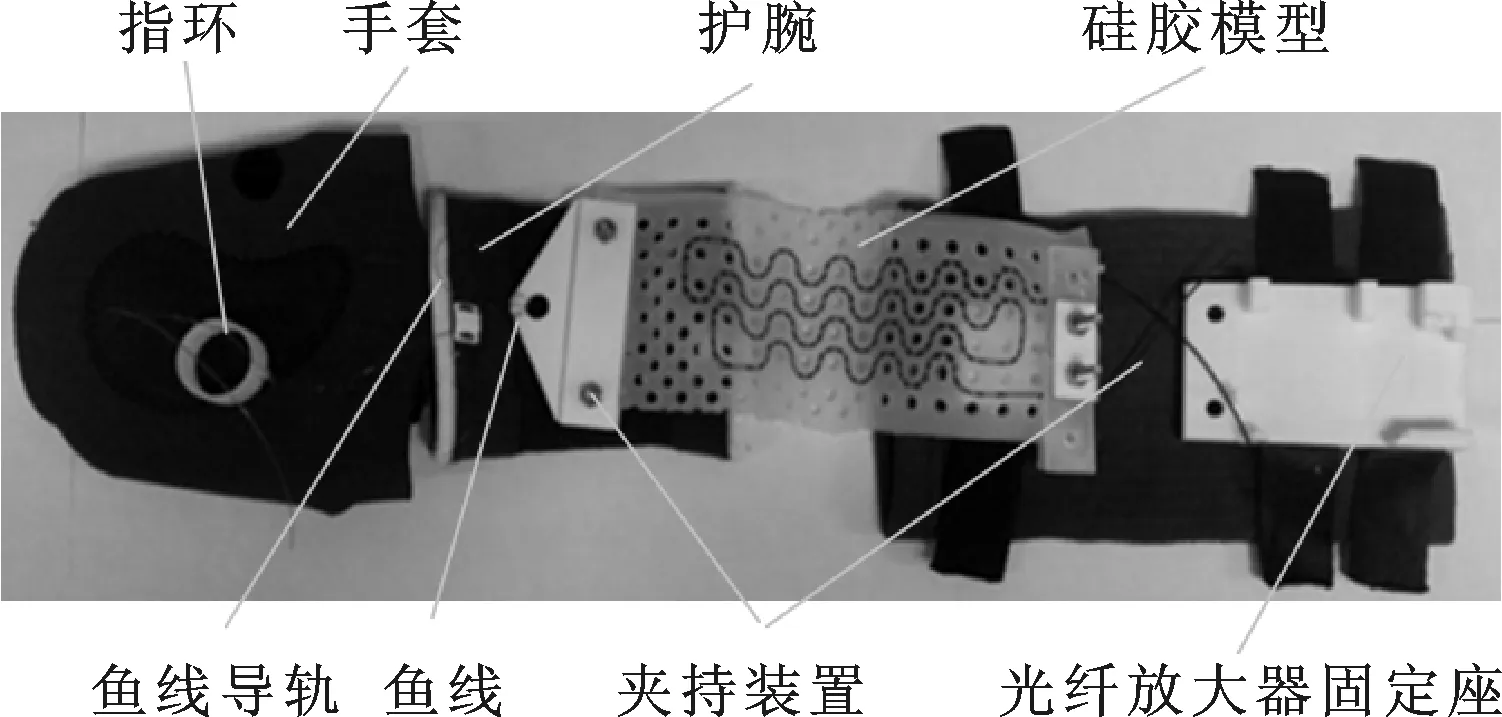
圖4 腕關節掌屈運動傳感器

圖5 硅橡膠模型拉伸試驗臺
2 腕關節運動監測裝置特性驗證
為了測量拉伸距離與光纖光強損耗的對應關系,搭建了如圖5所示的基于步進電機控制的硅膠模塊拉伸試驗臺。
試驗時,設定滾珠絲杠的滑塊移動范圍為30 mm,帶動硅膠模型做10次勻速拉伸收縮運動并用計算機通過NI采集卡記錄光纖放大器輸出的光強數據。將橫坐標拉伸位移0~30 mm表示硅膠模型正行程拉伸,-30~0 mm表示反行程收縮,確定位移與光纖放大器輸出電壓關系如圖6所示。
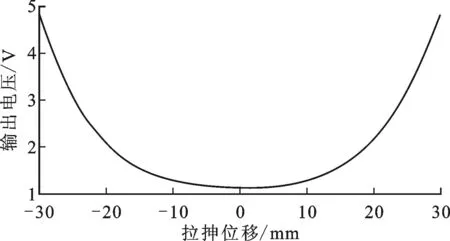
圖6 拉伸距離與輸出電壓的變化關系
計算重復性誤差
γR=±(ΔR,max/yFS)×100%=1.42%
(1)
式中:γR表示重復性誤差;ΔR,max表示同一方向多次測量的輸出值的最大差值;yFS表示輸出值的滿量程值。
計算遲滯
γH=±0.5×(ΔH,max/yFS)×100%=±1.39%
(2)
式中:γH表示遲滯誤差;ΔH,max表示正反行程中同一輸入量下輸出值的最大差值。
一般儀器設計中參考重復性誤差和參考遲滯性誤差規定小于5%,硅膠模塊符合儀器設計原則。圖6表明,多次測量中重復性誤差為1.42%,光纖宏彎損耗性質穩定;在拉伸距離小于30 mm時,輸出電壓與拉伸距離成線性變化,理論可以測量的距離范圍可以達到30 mm。
3 腕關節運動角度傳感器的驗證
3.1 基于皮膚伸縮的關節角度監測

圖7 腕關節角度與固定點距離變化試驗圖
應用腕關節角度測量裝置之前,需要確定腕關節兩側固定點之間的距離變化與腕關節運動角度變化的關系。本文設計了一個如圖7所示的穿戴裝置進行試驗測量。試驗時,將回復彈簧的一端固定在小臂,指環套在中指,使牽引線盡量保持在一個平面內,調整牽引線長度,在手腕上尋找屈曲運動轉動中心并標記,通過量角器測量腕關節屈曲角度,并測量拉線標記點與初始標記點間的距離。分別對5名測試者進行了3次試驗,每次試驗從0°開始到60°停止,每間隔10°記錄一次數據。對試驗數據進行線性擬合,擬合公式為
Y1=0.244 4X1+0.870 7
(3)
式中:X1表示關節運動角度;Y1表示固定點之間的相對距離。
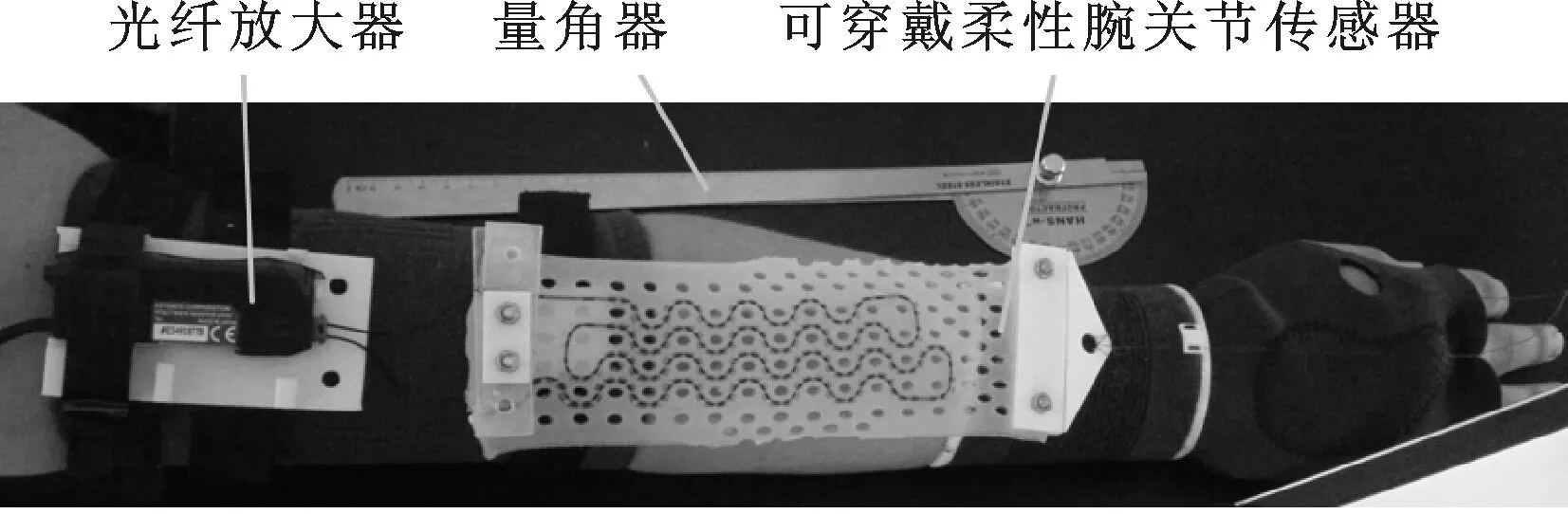
該直線擬合優度R2=0.956 5。對每個被試各組數據進行擬合,計算得到腕關節變化范圍在60°時,兩固定點間的距離變化量在14.87 mm到16.95 mm之間,單組數據進行線性擬合的擬合優度0.943 8 圖8 腕關節運動角度與位移的關系 在使用該設備之前,需要對穿戴裝置進行整體標定。隨機選取測試者,測量他的腕關節最大彎曲角度為70°,表面皮膚拉伸距離為17.5 mm。選取滾珠絲杠移動端位移為10 mm到27.5 mm的范圍代表需要測量的表面皮膚拉伸距離,將其轉換為0°~70°范圍內,圖9為手腕掌屈運動角度與輸出電壓的變化關系曲線。將該曲線作為傳感器特性曲線,確定其函數公式為 (4) 式中:X2表示腕關節彎曲角度;Y2表示在該角度下光纖傳感器的測量電壓。曲線的擬合優度R2=0.998 4。 圖9 手腕掌屈運動角度與輸出電壓的變化關系 傳感器驗證試驗是測量手腕在特定掌屈運動角度下的傳感器輸出值,并與理論分析的結果比較,修正誤差。穿戴效果如圖10所示。試驗時,首先調整牽引線長度使硅膠模型初始拉伸距離為10 mm。以5°為間隔,測量穿戴模塊在0°~70°之間的傳感器輸出電壓值,共測量3組。將測量數據進行擬合,與特性曲線對比如圖11所示,相對誤差為0.53%。 圖10 傳感器驗證試驗 圖11 試驗擬合曲線和理論曲線的對比 標定試驗結果中存在一定的誤差,主要由于制作的硅膠模塊在手腕運動過程中不能實時與小臂緊密貼合,存在擺動現象,使光纖的伸縮運動不在一個平面內。同時,在標定過程中人為的讀數誤差對結果也會產生影響。 本文分析了腕關節的運動形式,提出了用于監測腕關節掌屈運動的柔性光纖宏彎傳感器,并詳細描述了該裝置的制作過程。對原理樣機進行了驗證,試驗結果表明,測量裝置的遲滯為±1.39%,重復度為1.42%。制作物理樣機并進行標定試驗,結果顯示該傳感裝置能準確地監測手腕掌屈運動角度。在未來工作中,需要探究嵌入的光纖半徑對測量結果的影響,并設計導軌,引導硅膠模塊做直線運動,使硅膠模塊與小臂緊密貼合以減少測量誤差。
3.2 腕關節運動角度傳感器標定


3.3 討論
4 結 論
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
