通過斗輪機位置數據共享實現兩機防撞
2018-12-13 07:02:02楊柳中國電建集團長春發電設備有限公司
數碼世界 2018年11期
金 弘 楊柳 中國電建集團長春發電設備有限公司
一、前言
斗輪機是現代化工業大宗散狀物料連續裝卸的高效設備,目前已經廣泛應用于港口、碼頭、冶金、水泥、鋼鐵廠、焦化廠、儲煤廠、發電廠等散料(礦石、煤、焦碳、砂石)存儲料場的堆取作業。當兩臺斗輪機公用一條軌道時,為了避免兩臺斗輪機相撞,除了要求操作人員時刻保持注意力,還要借助激光檢測作為防撞保護裝置。
但是激光檢測防撞裝置對于安裝位置有一定要求,在其安裝位置之間不能有任何遮擋物,而且激光檢測裝置一旦出現故障操作人員無法及時察覺,當操作人員過分依賴激光檢測裝置時,事故就有可能發生;隨著互聯網時代的到來,共享模式已經深入到社會的每一個領域,汽車共享、單車共享、充電寶共享、雨傘共享,表面上它們共享的是產品,背后支撐它們的是龐大的數據共享,而共軌的兩臺甚至是多臺斗輪機也可以借鑒共享模式,將它們的位置數據進行共享,當然共享的前提是數據一定要精確,所以將RFID(無線射頻識別)引入到斗輪機的定位系統之中,不僅可以將兩臺斗輪機的位置數據規定在同一數據模式下,也為兩臺斗輪機位置數據共享提供了精度保證,當兩臺斗輪機位置數據實現共享之后,操作人員可以在斗輪機上看到軌道上任意一臺斗輪機的位置數據,同時在程序編寫中設置一定的安全距離,從而實現兩機防撞的功能。
二、問題的難點和解決方案
2.1 問題的難點
一是共軌斗輪機通常采用激光檢測裝置,但是激光檢測防撞裝置對于安裝位置有一定要求,在其安裝位置之間不能有任何遮擋物,而且激光檢測裝置一旦出現故障操作人員無法及時察覺,當操作人員過分依賴激光檢測裝置時,事故就有可能發生。二是如果采用編碼器定位的數據共享,由于編碼器本身存在一定的誤差,而兩臺斗輪機的編碼器數據誤差會被進一步放大,而數據共享的前提是數據一定要準確。三是如何實現兩臺斗輪機的數據共享?四是如何利用共享后的位置數據?
2.2 解決方案
(1)斗輪機通過位置數據共享實現的兩機防撞功能。如果兩臺斗輪機可以知道彼此所在料場的準確位置,斗輪機通過在程序里設置安全距離,可以實現近距離提醒以及防撞報警的功能。
(2)采用RFID(無線射頻識別)對編碼器進行位置校正。從概念上來講,RFID類似于條碼掃描,對于條碼技術而言,它是將已編碼的條形碼附著于目標物并使用專用的掃描讀寫器利用光信號將信息由條形磁傳送到掃描讀寫器;而RFID則使用專用的RFID讀寫器及專門的可附著于目標物的RFID標簽,利用頻率信號將信息由RFID標簽傳送至RFID讀寫器。斗輪機利用RFID主要是將料場的位置信息設置在RFID中,當兩臺斗輪機讀取他們所在位置的位置信息就實現了斗輪機的精準定位,而且這種定位方式是將兩臺斗輪機的位置建立在統一坐標系中,即使產生誤差,兩臺斗輪機之間的距離數據也是精準無誤的。
(3)通過工業以太網通訊實現兩臺斗輪機的數據共享。通過兩臺斗輪機PLC的以太網模塊,利用光纖或無線通訊技術,可以將兩臺斗輪機的PLC建立在同一網絡中,這里可以采用硬件組態,也可以通過使用 SFC65“X_SEND”和SFC66“X_RCV”發送和接收數據,都可以實現兩臺斗輪機的位置數據共享。
(4)通過程序編寫,通過對比兩臺斗輪機的位置數據設置安全距離從而實現斗輪機兩機防撞功能。當斗輪機1的位置數據DATA1與斗輪機2位置數據DATA2的相對距離達到報警距離時,會對兩臺斗輪機進行預報警,當兩臺斗輪機之間的距離小于安全距離時會觸發斗輪機防撞報警。
三、系統的整體設計方案
3.1 系統的構成
采用RFID位置校正的斗輪機定位裝置,帶有主從站的西門子品牌的斗輪機PLC控制系統,采用光纖通訊,一套工業交換機,一臺裝有西門子工控軟件的筆記本電腦。
3.2 具體方案
3.2.1 在堆取料機側下方安裝 RFID 讀寫頭,在皮帶機機架上每隔若干米安裝一個載碼體,每個載碼體存儲當前具體的位置信息。當讀寫頭經過載碼體時,會從載碼體內讀取出當前位置信息,然后通過 PROFIBUS-DP 總線接口通信模塊將數據傳輸給 S7-400 PLC系統,PLC 將其與編碼器位置信息比較,從而校正堆取料機行走位置。

3.2.2 建立兩臺斗輪機PLC的工業以太網
首先搭建一套測試設備,設備的結構圖如下:
2套 S7-300系統由 PS307電源、CPU314C-2DP、CPU314C-2PTP、CP343-1、CP343-1 IT、PC、CP5611、STEP7 組 成,PLC 系統概貌如下圖:
打開SIMATIC Manager,根據我們系統的硬件組成,進行系統的硬件組態,設置CP343-1、CP343-IT模塊的參數,建立一個以太網,MPI、IP 地址:
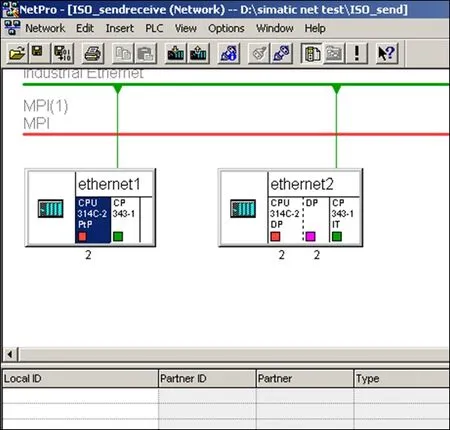
組態完2套系統的硬件模塊后,分別進行下載,然后點擊Network Configration按鈕,打開系統的網絡組態窗口NetPro,選中CPU314,如下圖:
到此為止,系統的硬件組態和網絡配置已經完成。下面進行系統的軟件編制,在SIMATIC Manager界面中,分別在CPU314C-2PTP、CPU314C-2DP中插入OB35定時中斷程序塊和數據塊DB1,DB2,并在兩個 OB35中調用FC5(AG_Send)和 FC6(AG_Recv)程序塊,如下圖:
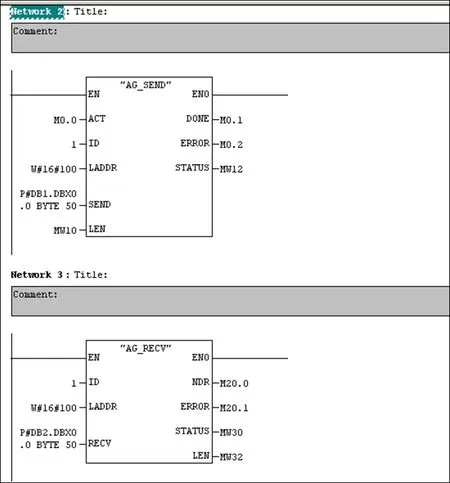
2套控制程序已經編制完成,分別下載到CPU當中,將CPU狀態切換至運行狀態,就可以實現S7-300之間的以太網通訊了。
如下界面說明了將CPU314C-2DP 的DB1中的數據發送到CPU314C-2PTP 的DB2中的監視界面:
a.選擇Data View,切換到數據監視狀態;
b.CPU314C-2DP 的DB1中發送出去的數據;
c.CPU314C-2PTP 的DB2中接收到的數據。
3.2.3 如果只是對位置數據進行共享也可以采用在A站(2號站)的PLC的定時循環中斷組織塊OB35中編寫發送程序,把A站中的MB20~MB24發送到B站(3號站)。程序如下
CALL "X_SEND" //SFC65
REQ :=TRUE //使能端
CONT :=TRUE //通訊資源,=TRUE時,完成后保持連接,=FALSE時,不保持
DEST_ID:=W#16#3 //對方 PLC2 的MPI 地址
REQ_ID :=DW#16#1 //ID 號
SD :=P#M 20.0 BYTE 5 //2 號站要發送的數據區指針,MPI通訊一次最多可發送76個字節。
RET_VAL:=MW2 //狀態返回字
BUSY :=M1.0 // 當前通訊有沒有完成
2、在B站的OB1中編寫接收程序,把A站(2號站)發送到的數據存入B站(3號站)的MB30~MB34中。程序如下
CALL "X_RCV" //SFC66
EN_DT :=TRUE //使能接收
RET_VAL:=MW2 //返回的狀態字
REQ_ID :=MD4 //ID 號
NDA :=M1.1 // 接收完成一次,本位有一個掃描周期的高電平
RD :=P#M 30.0 BYTE 5 //3號站,將接收到的數據放到這個指定的數據區
3.2.4 當兩臺斗輪機的位置數據實現共享之后,利用斗輪機的位置數據進行編程設定,嘉定兩臺斗輪機之間的安全距離為40米,當斗輪機1 的位置數據DB1與斗輪機2的位置數據DB2之間的差小于等于40米時,處在前端的斗輪機無法進行后退操作,而處在后面的斗輪機無法進行前進操作。同時也可以將兩臺斗輪機的位置數據顯示在司機室的觸摸屏中,讓操作人員可以實時觀察兩臺斗輪機的各自所在的位置和相對距離,在人為操作層面提前做出安全操作。
3.2.5 當兩臺斗輪機之間建立了網絡,數據可以進行交換和共享,可以共享的數據不僅僅只有位置數據,通過對斗輪機的不同運行數據可以實現兩臺斗輪機之間的高進度連鎖控制功能,利用兩臺斗輪機的跟隨調車功能,跟隨作業功能,甚至是兩臺斗輪機的全自動控制功能。
四、結束語
斗輪機通過位置數據共享不僅可以實現的兩機防撞功能,通過對大量斗輪機運行數據共享,可以開發出更多的多臺斗輪機連鎖控制功能,而斗輪機通過位置數據共享也不僅僅是取代了激光防撞檢測裝置,隨著工業以太網的迅速發展,只要是工業以太網絡的內的設備,都可以進行數據共享,功能連鎖,不僅大大提高了工業的自動化程度,隨著互聯網的發展,遠程控制,無人值守功能都離不開數據共享,而實現斗輪機防撞功能只是邁出了數據共享應用的第一步。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
海峽科技與產業(2016年3期)2016-05-17 04:32:12