基于圖像處理和最小二乘法的原子力顯微鏡光路自動調(diào)整方法
2018-12-17 07:32:38程利群曲英敏楊煥洲孫佰順
程利群,曲英敏,楊煥洲,孫佰順
(長春理工大學(xué) 國家納米操縱與制造國際聯(lián)合研究中心,長春 130022)
隨著人們對納米技術(shù)探知的程度越來越深入,原子力顯微鏡(Atomic Force Microscope,AFM),自1986年問世以來已成為觀測和操縱納米尺度物質(zhì)的重要工具。由于其不受樣品導(dǎo)電性的限制,應(yīng)用領(lǐng)域非常廣,涵蓋物理學(xué)、化學(xué)、醫(yī)學(xué)、生物學(xué)、微電子學(xué)、材料科學(xué)、微機(jī)械及微納米技術(shù)等諸多領(lǐng)域[1-3]。近些年來在生物醫(yī)學(xué)領(lǐng)域,特別是生物細(xì)胞等研究已取得很多重要的研究成果[4,5]。
AFM是依靠原子、分子之間相互作用力對微納尺度物體進(jìn)行成像的儀器,主要由微米尺度的微懸臂其下方帶有曲率半徑為納米量級的探針、四象限光電探測器、激光器及壓電陶瓷掃描器組成。其工作原理如下:激光光斑照射到探針上方的微懸臂,光斑經(jīng)微懸臂反射到四象限探測器中心位置。當(dāng)探針與被測樣品接觸時,會產(chǎn)生一個微小的作用力,使微懸臂產(chǎn)生偏移導(dǎo)致反射到四象限探測器的光斑偏離中心,控制壓電陶瓷掃描器使反射到四象限的光斑保持在中心位置,并通過一定的成像方法即可計(jì)算得出樣品的表面形貌[6]。
目前,AFM激光反射光路主要依靠手動調(diào)節(jié)[7],具體實(shí)施方法為:首先調(diào)整激光器或探針模組使激光光斑照射在微懸臂后方毫米級的反光片上,然后逐漸調(diào)整光斑位置使其照射在探針上方微懸臂區(qū)域,再調(diào)整四象限探測器使光斑反射到其中心位置,調(diào)節(jié)過程中可利用帶有顯微鏡的CCD對光斑位置進(jìn)行輔助觀察。手動調(diào)節(jié)方法可操作性差、過程繁瑣,每次更換探針時都需要重新調(diào)整光路,易使操作者眼睛疲勞甚至出現(xiàn)損傷的情況。
本文針對手動調(diào)整激光反射光路的不足,提出了基于圖像處理和最小二乘的原子力顯微鏡光路自動調(diào)整方法。主要在自制原子力顯微鏡系統(tǒng)上進(jìn)行開發(fā),系統(tǒng)的探針架安裝可通過計(jì)算機(jī)控制二維移動、位移精度為1μm的電機(jī),并通過相關(guān)算法實(shí)現(xiàn)對原子力顯微鏡反射光路自動調(diào)整。
1 基于圖像處理方法識別探針懸臂及激光光斑
1.1 自適應(yīng)閾值法識別探針懸臂
由于CCD采集的探針懸臂圖像并非復(fù)雜圖像,圖像信息中只含有微懸臂及樣品或者是樣品容器表面。因此為了提高圖像處理的速度,將CCD采集的3通道24位圖像轉(zhuǎn)換為單通道8位圖像,如式1所示。

式中,IR(x,y),IG(x,y),IB(x,y)分別為彩色圖像的紅綠藍(lán)分量,I(x,y)為變換后的灰度值,(x,y)代表圖像橫縱坐標(biāo)。
為了增加懸臂在圖像中的對比度利用直方圖增強(qiáng)算法,采用直方圖修正過的圖像可以使圖像灰度分布均勻、細(xì)節(jié)清晰和邊緣突出,從而達(dá)到目標(biāo)增強(qiáng)的目的。原圖像直方圖k級灰度值Ik(x,y)經(jīng)增強(qiáng)后為:

式中,ni為灰度值為i的像素個數(shù),n為圖像總像素值個數(shù)。并對增強(qiáng)后的圖像數(shù)值取反由式(3)表示。

探針上方微懸臂形狀不一,目前常見有三角形和矩形微懸臂。微懸臂在CCD采集的圖像中對比度較高,可以采用閾值算法對其分割。但是當(dāng)圖像亮暗度有所變化時,固定閾值對并不能準(zhǔn)確識別懸臂所有輪廓。因此本文采用自適應(yīng)閾值算法對微懸臂進(jìn)行分割,能針對不同亮度圖像將其對比度高的區(qū)域識別出來,自適應(yīng)閾值公式為[8]:

式中,ω0代表目標(biāo)像素所占的比例,ω1代表背景像素所占的比例,μ0是目標(biāo)像素的灰度均值,μ1是背景像素的灰度均值,μ是整個圖像的灰度均值,σ2為類間方差。圖像共有N個灰度級,在[0,N-1]內(nèi)依次選取閾值T,使類間方差最大的值為最佳閾值。
最后采用連通域算法對分割后的目標(biāo)圖像像素點(diǎn)做標(biāo)記,根據(jù)坐標(biāo)將尺寸為100×100像素探針上方微懸臂區(qū)域標(biāo)記出。
1.2 差分法識別激光光斑
本文采用圖像差分法識別激光光斑,差分法檢測目標(biāo)時具有檢測準(zhǔn)確、能克服閾值法不能有效識別對比度低的目標(biāo)和目標(biāo)像素值低在圖像中肉眼分辨不出等優(yōu)點(diǎn)。
具體方法為:移動探針架電機(jī)至微懸臂后的反光片全部進(jìn)入CCD視場,保存圖像為I1,本方法移動距離為150μm。
打開激光器并保存光斑照射在反光片的圖像I2。運(yùn)用圖像差分法I2減I1得到差分圖像,并用自適應(yīng)閾值算法對差分圖像進(jìn)行識別,得出光斑輪廓。根據(jù)閾值后的圖像利用重心法計(jì)算光斑質(zhì)心,重心法見式(5)和式(6):
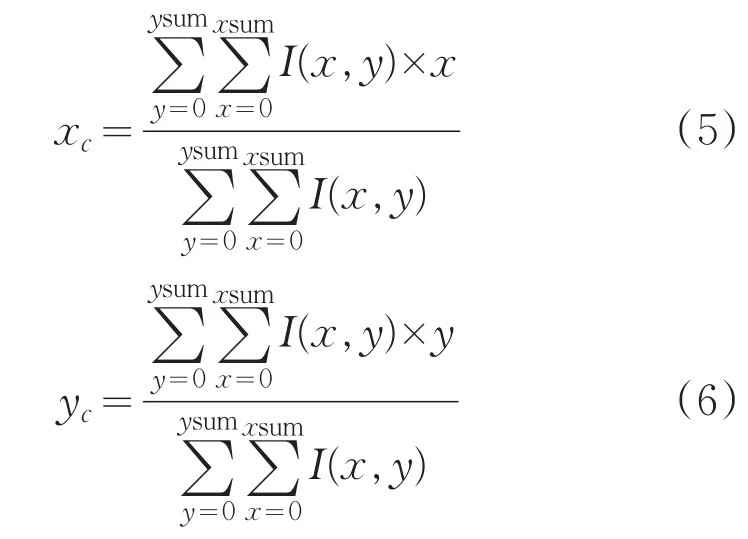
式中,xc、yc代表x和y方向質(zhì)心,I(x,y)代表圖像(x,y)點(diǎn)像素值。最后以質(zhì)心為中心在圖像I2標(biāo)出100×100像素光斑區(qū)域。
2 微懸臂移動距離與像素位置變化的最小二乘法擬合
由于系統(tǒng)裝配和步進(jìn)電機(jī)移動都含有一定的誤差,靜止標(biāo)定CCD像素尺寸并不適合,本文采用最小二乘法對電機(jī)移動微懸臂的距離與其在CCD圖像中像素坐標(biāo)變化進(jìn)行擬合[9]。具體步驟為:
(1)利用自適應(yīng)閾值算法計(jì)算得出微懸臂區(qū)域最邊緣點(diǎn)的橫坐標(biāo)并保存作為基準(zhǔn)點(diǎn)X0。
(2)移動橫向電機(jī)距離控制在100μm以內(nèi),利用步驟1得出橫坐標(biāo)X1和像素坐標(biāo)的變化量ΔX0=|X0-X1|,同時也得到電機(jī)移動距離|Lx0|,以上全部為絕對值。
(3)重復(fù)步驟2得出多組對應(yīng)關(guān)系式ΔX1=|X1-X2|、|Lx1|,ΔX2=|X2-X3|、|Lx2|……,利用最小二乘法擬合出圖像像素變化與電機(jī)移動距離之間的關(guān)系式,如式(7):

式中,a,b為待求解系數(shù),矩陣A為。
本文采集8組數(shù)據(jù)進(jìn)行擬合。求Y方向的對應(yīng)關(guān)系式,只需根據(jù)步驟1、2、3移動縱向電機(jī)得到縱向移動距離|LY0|、|LY1|、|LY2|……,和Y方向微懸臂像素變化量 ΔY0=|Y0-Y1|、ΔY1=|Y1-Y2|、ΔY2=|Y2-Y3|……,并利用公式(7)計(jì)算得出Y方向擬合系數(shù)a,b。
3 光路自動調(diào)整方法設(shè)計(jì)及結(jié)果
算法依托于實(shí)驗(yàn)室自制原子力顯微鏡開發(fā),相對于傳統(tǒng)原子力顯微鏡其探針架裝有計(jì)算機(jī)可控、精度為1μm的步進(jìn)電機(jī),系統(tǒng)結(jié)構(gòu)示意圖如圖1所示。CCD、四象限光電探測器、探針架的步進(jìn)電機(jī)、壓電陶瓷掃描器以及其下方的步進(jìn)電機(jī)均由計(jì)算機(jī)控制并讀取數(shù)據(jù)。
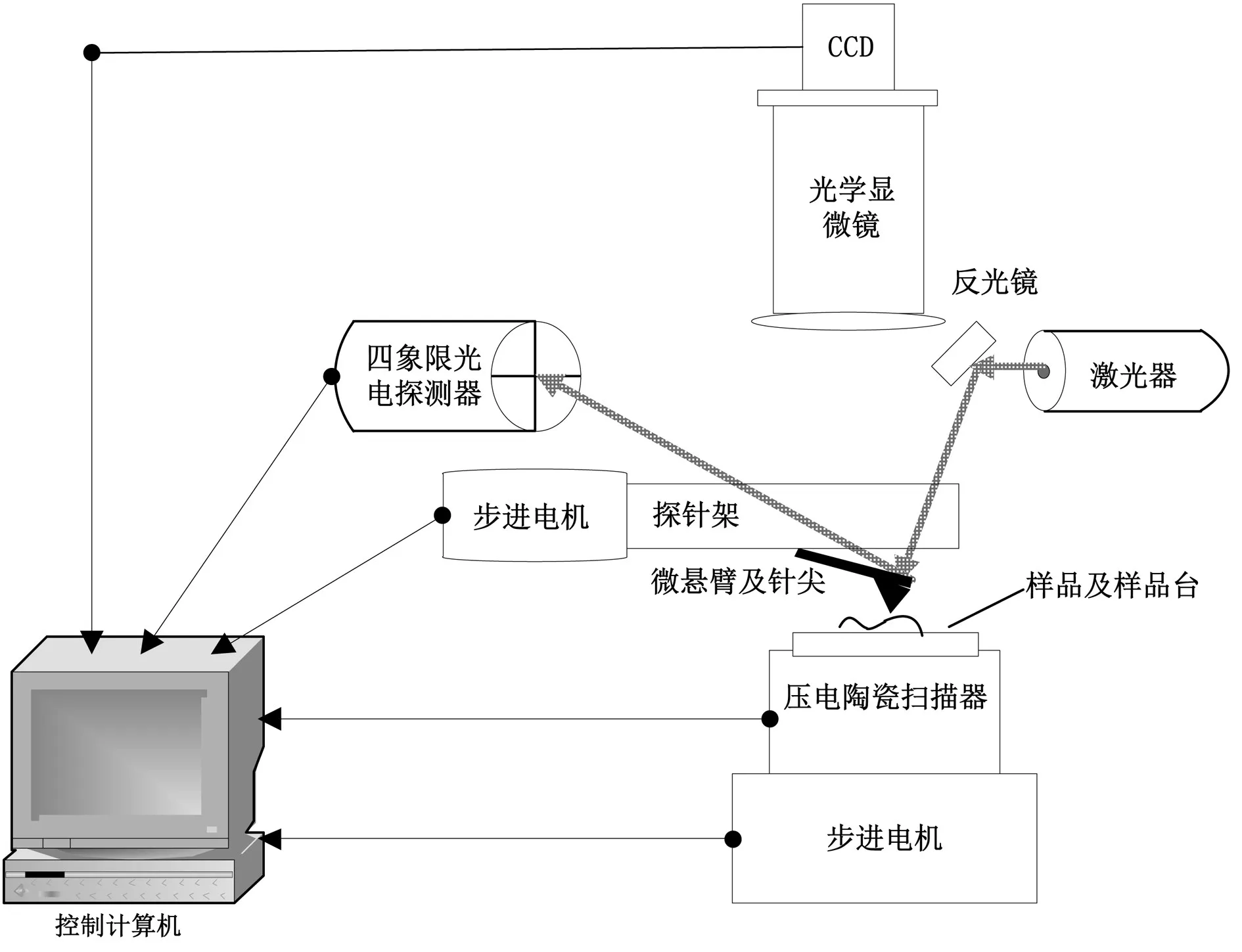
圖1 系統(tǒng)結(jié)構(gòu)示意圖
光路自動調(diào)整方法流程由圖2所示,具體步驟如下:
(1)系統(tǒng)裝配,調(diào)節(jié)激光光路利用傳統(tǒng)方法、調(diào)整帶有CCD的顯微鏡到合適放大倍率,目的一是保證激光光斑和微懸臂在CCD視場內(nèi)可見、二是在成像過程中能夠觀察到被測樣品。本方法結(jié)合實(shí)驗(yàn)系統(tǒng)放大倍率固定到3倍。
(2)利用前文自適應(yīng)閾值算法識別微懸臂。
(3)最小二乘法擬合電機(jī)移動距離與在CCD圖像中像素位置變化之間的關(guān)系式。
(4)判斷系統(tǒng)標(biāo)定是否完成,完成則執(zhí)行下一步。
(5)識別微懸臂。
(6)差分法識別激光光斑。
(7)通過最小二乘擬合的參數(shù)將微懸臂探針上方區(qū)域移動到光斑中心點(diǎn)位置。
系統(tǒng)標(biāo)定過程就是執(zhí)行步驟1、2、3,如果顯微鏡倍率和位置需要調(diào)整時,需重新標(biāo)定,通常情況只需標(biāo)定一次即可。算法每次執(zhí)行時,只需執(zhí)行步驟5、6、7。
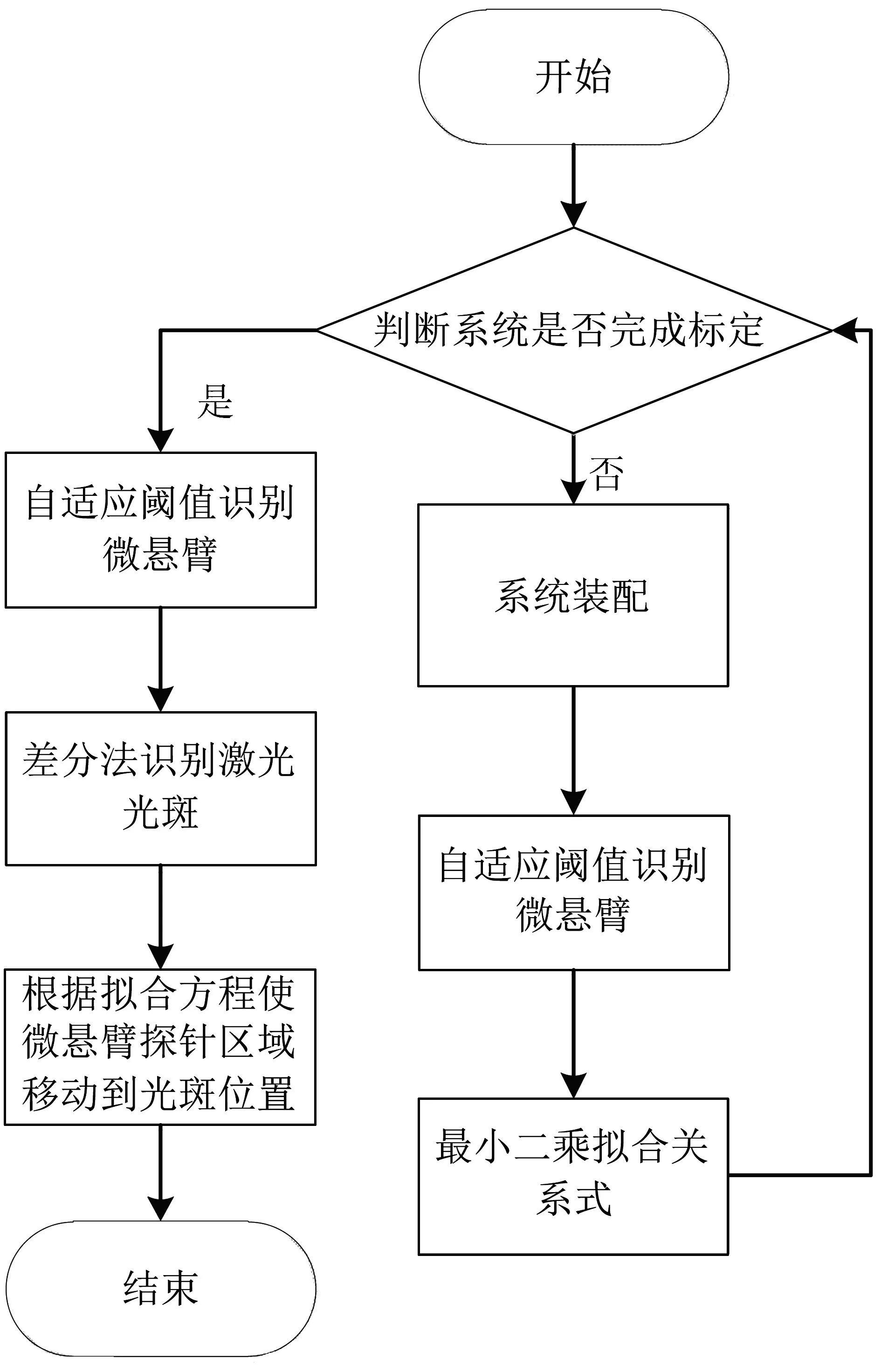
圖2 光路自動調(diào)整方法流程
自適應(yīng)閾值識別探針微懸臂結(jié)果由圖3和圖4所示,圖3是三角形懸臂,圖4是矩形懸臂,都是目前常用的探針懸臂。從圖3(b)、圖4(b)可以看出自適應(yīng)閾值算法可以準(zhǔn)確將懸臂區(qū)域分割出來,連通域標(biāo)記結(jié)果由圖3(c)、圖4(c)所示。最后通過連通域標(biāo)記的懸臂邊緣可以識別到探針上方微懸臂區(qū)域,最終結(jié)果由圖3(d)、圖4(d)所示。結(jié)果可以說明本文提出的自適應(yīng)閾值算法能夠準(zhǔn)確分割不同形狀的微懸臂,并通過連通域標(biāo)記的點(diǎn)識別探針上方微懸臂區(qū)域。
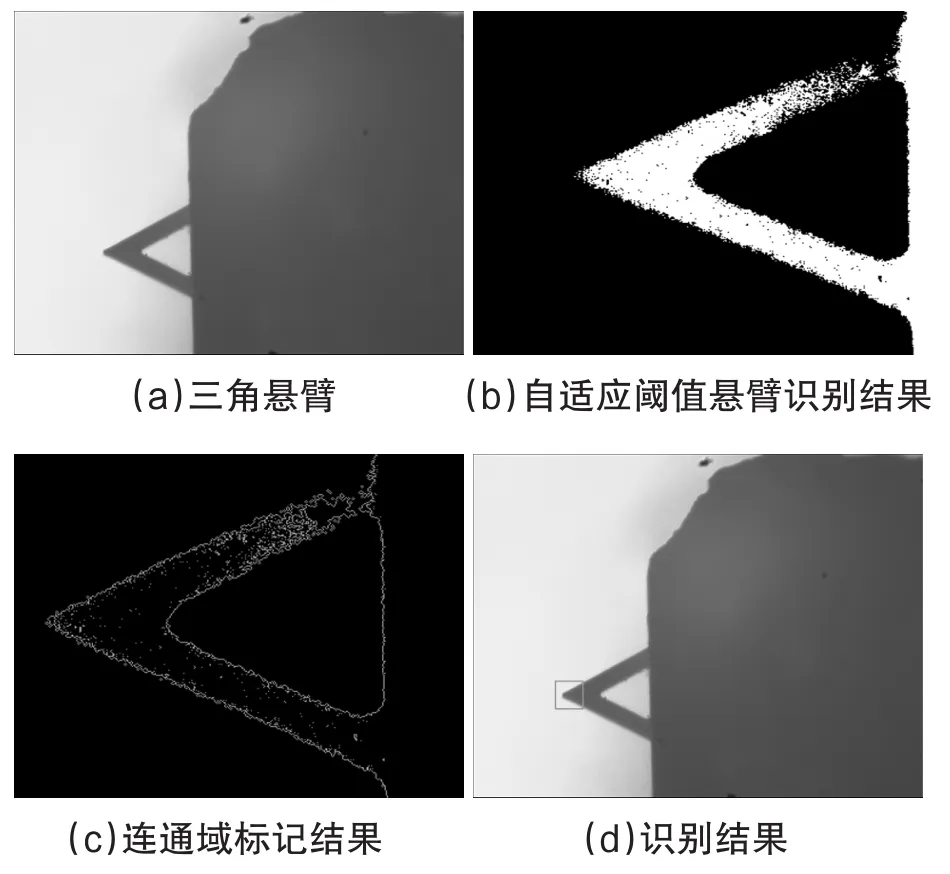
圖3 三角形懸臂識別結(jié)果
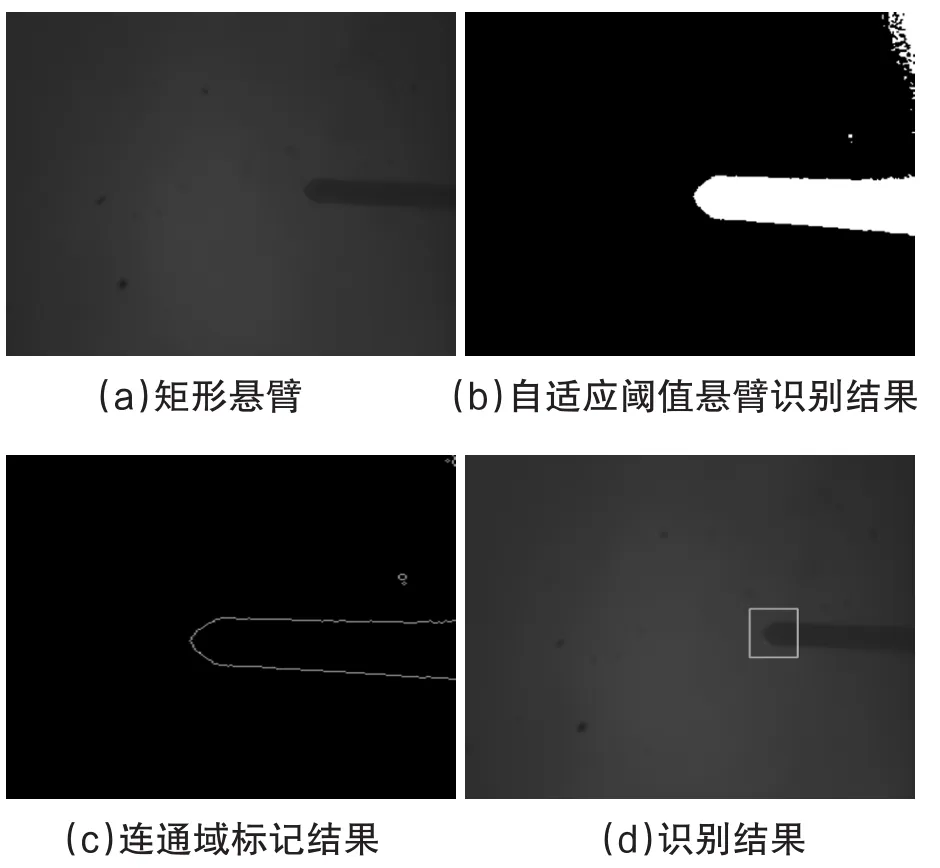
圖4 矩形懸臂識別結(jié)果
激光光斑識別結(jié)果由圖5所示,首先將微懸臂圖像和微懸臂帶有激光光斑圖像進(jìn)行灰度變換,結(jié)果分別由圖5(a)、圖5(b)所示。圖像差分法圖(b)減圖(a)的結(jié)果經(jīng)自適應(yīng)閾值算法對光斑識別,結(jié)果由圖5(c)所示。最后通過重心法標(biāo)出光斑質(zhì)心并標(biāo)出光斑位置,圖5(d)為光斑識別結(jié)果。
最小二乘擬合的微懸臂移動距離與像素變化的關(guān)系式由表1所示。ax、bx代表X軸橫向線性擬合參數(shù)a、b,ay、by代表Y軸縱向線性擬合參數(shù)a、b。相同條件連續(xù)擬合5次,標(biāo)準(zhǔn)差由ax至by分別為:0.00208、0.00043、0.00211、0.00345,由此可以看出利用最小二乘法擬合懸臂移動距離與像素變化得到的結(jié)果比較穩(wěn)定。
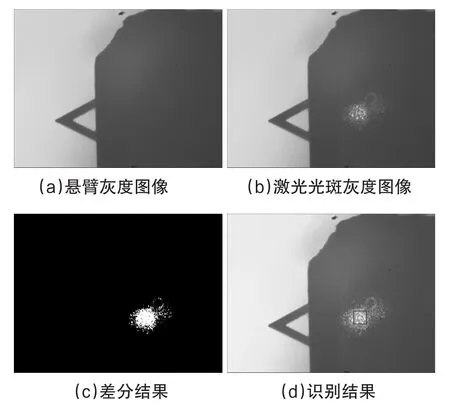
圖5 激光光斑識別過程
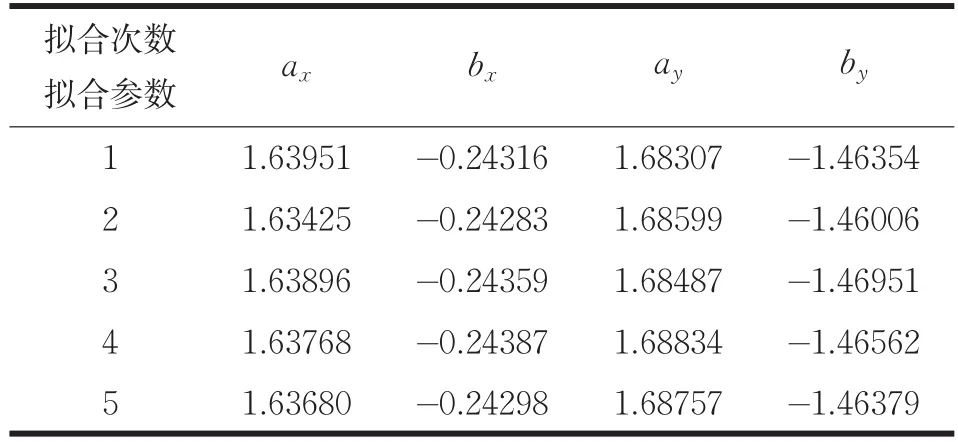
表1 圖像像素與微米電機(jī)移動距離最小二乘擬合關(guān)系式
圖6給出了步驟7探針上方懸臂移動至光斑位置的過程。圖6(d)為過程1,確定了微懸臂位置。圖6(i)是過程12探針上方微懸臂已移動到了光斑中心位置。過程1至12是微懸臂由右向左,由上到下根據(jù)擬合參數(shù)ax、bx、ay、by將探針上方微懸臂移動至光斑中心的過程。圖6可以看出本文提出的基于圖像處理和最小二乘的原子力顯微鏡光路自動調(diào)整方法在激光光路自動調(diào)整中取得了較好的結(jié)果。
4 結(jié)論
本文針對傳統(tǒng)手動調(diào)整AFM光路的不足,提出了一種基于圖像處理和最小二乘的AFM光路自動調(diào)整方法。圖像處理部分主要由自適應(yīng)閾值算法識別探針微懸臂和差分法識別光斑,兩種算法均取得了良好效果,其中自適應(yīng)閾值算法可以準(zhǔn)確識別目前市面常見的矩形懸臂和三角形懸臂。最小二乘法擬合微懸臂移動距離與其在CCD圖像中像素距離變化的關(guān)系式系數(shù)ax、bx、ay、by結(jié)果穩(wěn)定,同樣條件下擬合5次,標(biāo)準(zhǔn)差分別為:0.00208、0.00043、0.00211和0.00345。結(jié)果表明所提出的光路自動調(diào)整方法在AFM光路調(diào)整過程中效果良好,在AFM系統(tǒng)的光路調(diào)整中具有重要的應(yīng)用價(jià)值。
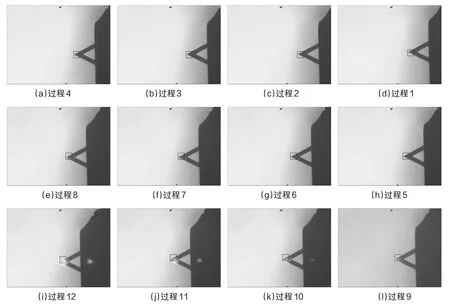
圖6 激光光路自動調(diào)整過程