蚱蜢仿生機器人腿部結構分析與設計*
2018-12-18 10:16:28熊勇剛彭未來熊凱旋劉亞春
科技與創新 2018年23期
熊勇剛,彭未來,熊凱旋,劉亞春
?
蚱蜢仿生機器人腿部結構分析與設計*
熊勇剛,彭未來,熊凱旋,劉亞春
(湖南工業大學 機械工程學院,湖南 株洲 412007)
以生物學蚱蜢的腿部構造為基礎,建立仿蚱蜢腿部跳躍機器人桿件模型,模仿蝗蟲后腿結構,設計了仿蚱蜢跳躍機器人彈跳腿,利用人工肌肉收縮拉動三連桿快速擺動實現起跳。建立了彈跳機構的動力學模型,用ADAMS進行仿真,結果顯示了彈跳腿在高爆發高輸出方面的可行性。
蚱蜢;后腿結構;人工肌肉;彈跳機構
1 引言
有關仿生跳躍機器人的研究領域里,國內和國外已經做了很多相關的工作并且取得了初步的研究成果,比如制作了仿袋鼠機器人、仿蟋蟀機器人、仿蝗蟲機器人等。目前,仿生機器人的研究主要集中在兩個方向,即生物運動機理的研究和生物行為方式的研究[1]。
近年來,越來越多的研究人員開始對跳躍機器人的性能研究。在對跳躍機器人研究中,很多都是模仿具有跳躍能力的生物,比如青蛙[2]、蝗蟲[3-6]、跳蛛[7]等。蚱蜢是公認的“跳躍專家”,其跳躍能力為其身長的15~30倍[8-9]。蚱蜢的跳躍運動有強大的越障能力、極快的跳躍速度、強大的地面適應性、廣闊的運動范圍、跳躍運動的多次持續性、方向可控性、跳躍運動的爆發性和突然性等特點。
本文嘗試采用新的驅動方式來對仿蚱蜢的跳躍機器人的機構進行設計,從蚱蜢的跳躍仿生原理著手,根據蚱蜢在跳躍的過程中運動激勵,設計出模仿蚱蜢的彈跳后腿,利用氣動肌肉系統即人工肌肉來模擬蚱蜢后腿的相關肌肉結構,為更深一步地深入研究仿蚱蜢跳躍機器人提供借鑒和參考。
2 蚱蜢后足結構
蚱蜢的跳躍主要靠其強勁而有力的后足,后足主要由腿節、脛節和跗節構成,其中腿節與軀體相連,跗節延伸處為跗足,腿節與軀體、腿節與脛節、脛節與跗節之間分別通過腿關節、膝關節和跗關節連接,可相對轉動。后足結構如圖1所示。蚱蜢如果能順利起跳,必須有足夠的克服地面反作用力的力和足夠快的起跳速度,后足腿節的肌肉非常發達,可充分滿足這些起跳需求。蚱蜢腿節的肌肉由伸肌和屈肌組成,相互合作共同完成蚱蜢的起跳動作,如圖2所示。
蚱蜢跳躍過程中,伸肌收縮儲存的能量、輸出的功率與時間的關系如圖3所示,要設計或研究一個蚱蜢腿部結構的仿生機構,必須使所設計的模型具有類似于腿部肌肉和半月板的一個能量儲存和釋放機構,例如彈簧、氣液壓缸、電動機、氣動肌肉等使得所設計仿生模型儲備完能量后能釋放能量完成起跳的外部激勵元件。

圖1 蚱蜢腿部結構圖

圖2 蚱蜢腿節肌肉圖
3 腿部機構模型的建立
蚱蜢的跳躍運動的動力主要來源于其強勁而有力的后足,在最初準備起跳的階段到離地的階段,蚱蜢后腿從幾乎完全折疊到完全伸展的過程中,后腿關節的夾角在非常短的時間內發生了大范圍變化,蚱蜢在一次最長距離的跳躍過程中,其腿部肌肉在收縮的過程中也達到了最大輸出狀態。由于蚱蜢左右兩側肢體在向前跳躍時,其運動規律基本保持一致,因此在建立機構模型時為了進行簡化,可以只考慮單側模型,機構模型如圖4所示。
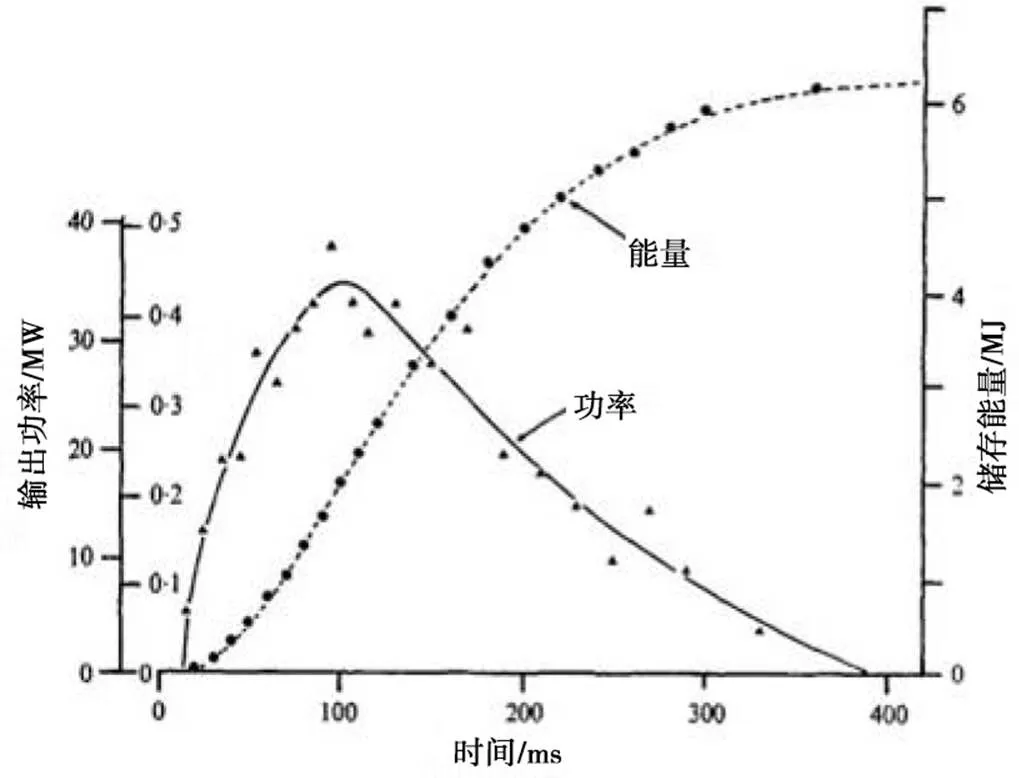
圖3 能量、輸出功率時間變化圖
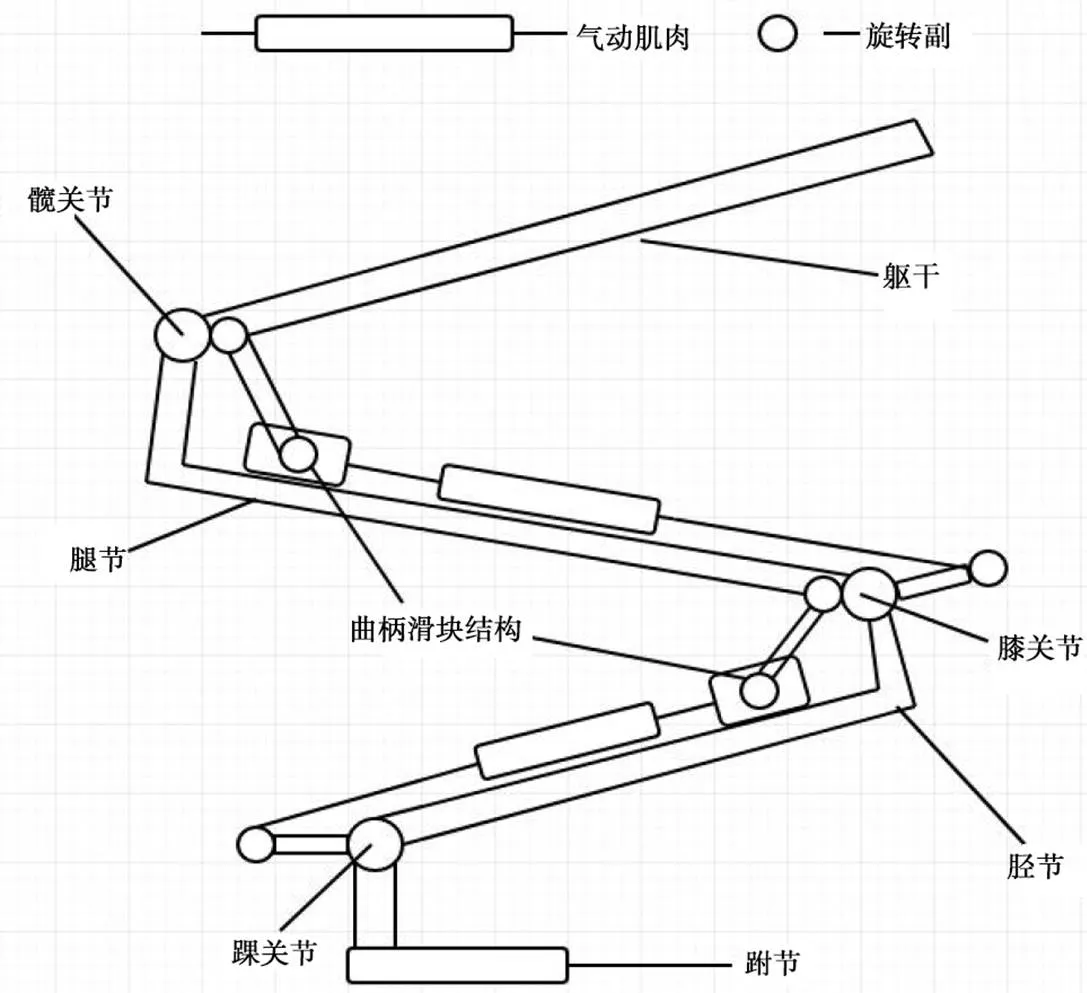
圖4 結構模型示意圖
生物肌肉具有較大柔韌性,它通過肌腱等柔性件與骨骼相連,進行直接作用,效率較高;由于氣動肌肉和生物肌肉在結構尺寸上相差較大,在橫向上不能受力并且不能產生位移,因此需將氣動肌肉與骨骼直接相連,沒有復雜的傳動裝置,也沒使用彈簧等彈性件進行關節的復位等操作。
根據蚱蜢后腿的組成結構與起跳方式,采用三連桿作為仿真結構,并且采用氣動肌肉作為跳躍過程中的驅動裝置。如圖5所示,人工肌肉在充氣時,徑向的擴張帶動軸向的收縮,進而產生牽引力,從而帶動負載進行單向運動,該過程可以模擬蚱蜢后腿肌肉的伸縮。在蚱蜢跳躍的過程中,首先對氣動肌肉充氣,從而讓其完成徑向擴張、軸向收縮,利用曲柄滑塊機構拉動桿轉動,該過程在很短時間內完成。
整個彈跳過程分為2步:①對人工肌肉即氣動肌肉充氣,使其快速收縮,從而拉動曲柄滑塊機構,讓關節瞬間張開,完成跳躍的動作;②跳躍之后,人工肌肉放氣,重新舒張,返回初始狀態。
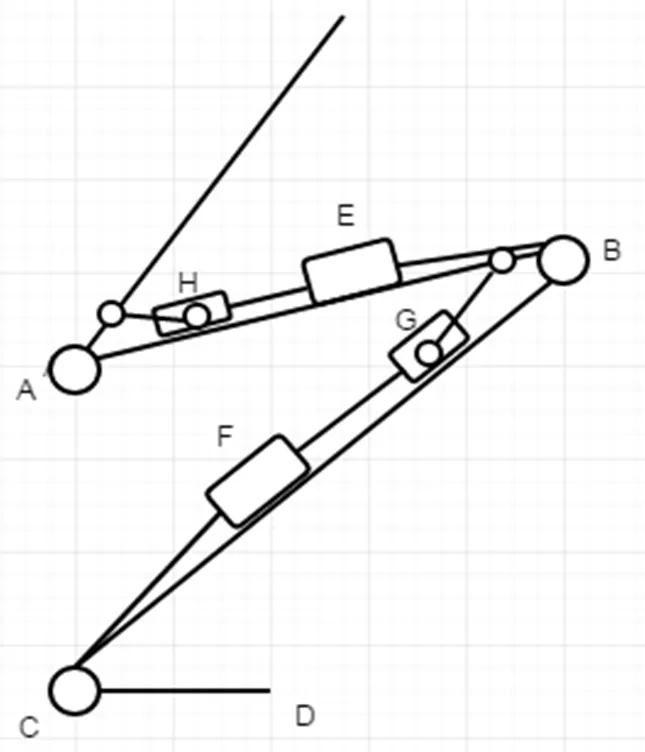
圖5 結構簡圖
注:桿AB、BC、CD分別為模仿蚱蜢后腿的股骨、脛骨與跗足,E與F為人工肌肉,G與H為曲柄滑塊機構。
4 仿蚱蜢彈跳腿的分析與仿真
4.1 仿蚱蜢彈跳腿動力學分析
本章所建模型旨在體現起跳時模型的突然性和爆發性,使模型起跳時具有足夠的爆發力,以改善仿蚱蜢腿部模型的跳躍性能。因此只針對模型起跳時進行動力學分析,分析其起跳時所具備的全部能量,闡明蚱蜢跳躍的能量傳輸規律。
系統的動力學方程,即拉格朗日方程如下:


計算拉格朗日函數時,需要求出各連桿的總動能和總位能,假設各連桿的質量分別為脛節1、腿節2、軀體3,以連桿末端的點質量表示,加速度分別為1,2,3,動能分別為1,2,3,位能分別為1,2,3,則拉格朗日函數的表達式就為:
=1+2+3-1-2-3.
脛節(1)的動能和位能為:

腿節(2)的動能和位能為:

連桿2的動能為:

位能為:
軀體質心的動能和位能為:
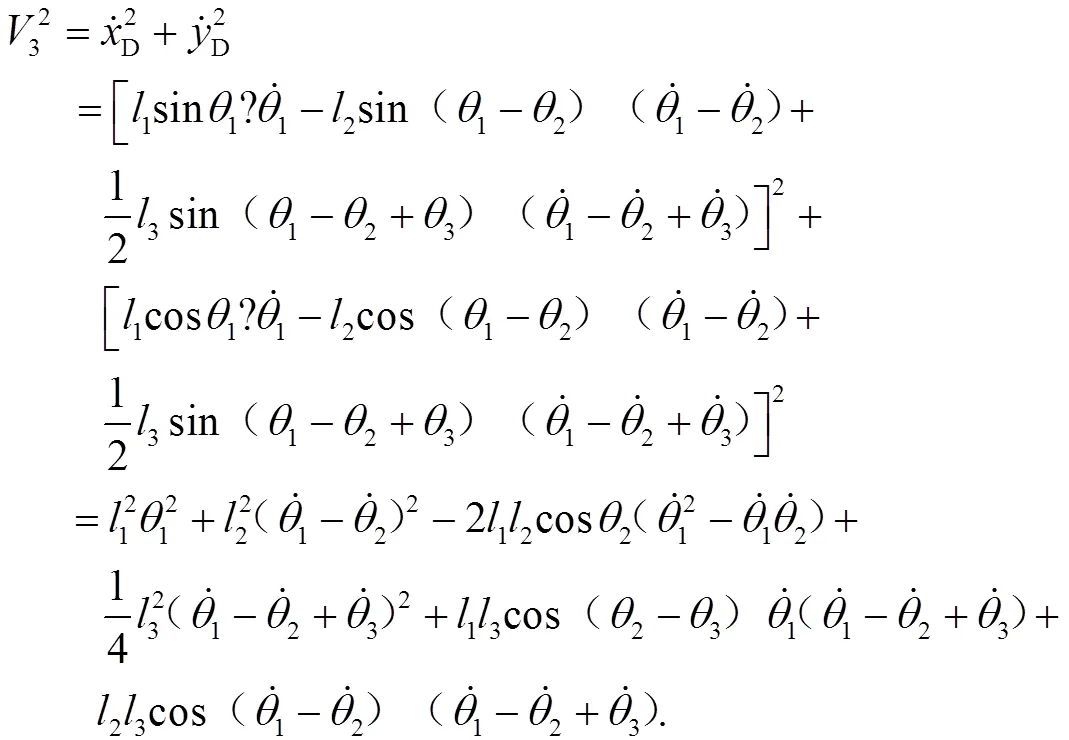
軀體質心處的動能為:
位能為:

那么總的動能為:
總的位能為:

因此,仿蚱蜢腿部跳躍機器人模型起跳階段的拉格朗日函數表達式為:
4.2 動力學仿真
利用ADAMS對三維模型進行跳躍運動的仿真和驗證。由于人工肌肉存在單次響應快、作用時間短和作用力大的特點,因此在仿真分析中可近似看作一個初始作用力大、彈性系數也較大的扭簧。圖6中彈跳腿跳躍仿真過程起跳時,由于關節處力矩作用,兩關節迅速張開,通過最底部關節與地面的作用,實現起跳。在仿真過程中作如下假設:所有部件均為剛體,在跳躍過程中不存在形變;部件與地面有較大摩擦因數,使得其在跳躍過程中水平方向位移很小。觀察跳躍過程中各關節運動軌跡,與試驗觀測現象對比,基本符合蝗蟲后腿運動過程。
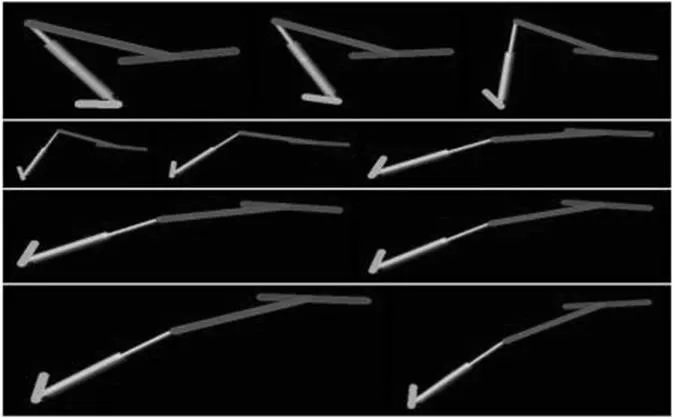
圖6 跳躍動態圖
4.2.1 位移分析
腿部、質心處方向和質心處方向的位移分別如圖7、圖8、圖9所示。從中可以看出,不管是各肢體的方向位移還是質心的方向位移,都是呈逐漸增長的趨勢的,說明模型的跳躍趨勢是一直再往方向前進,并未出現翻轉或是旋轉;而方向的位移,跗節處的方向位移是增長最小的,增長最大的是質心處的位移。

圖7 腿部位移
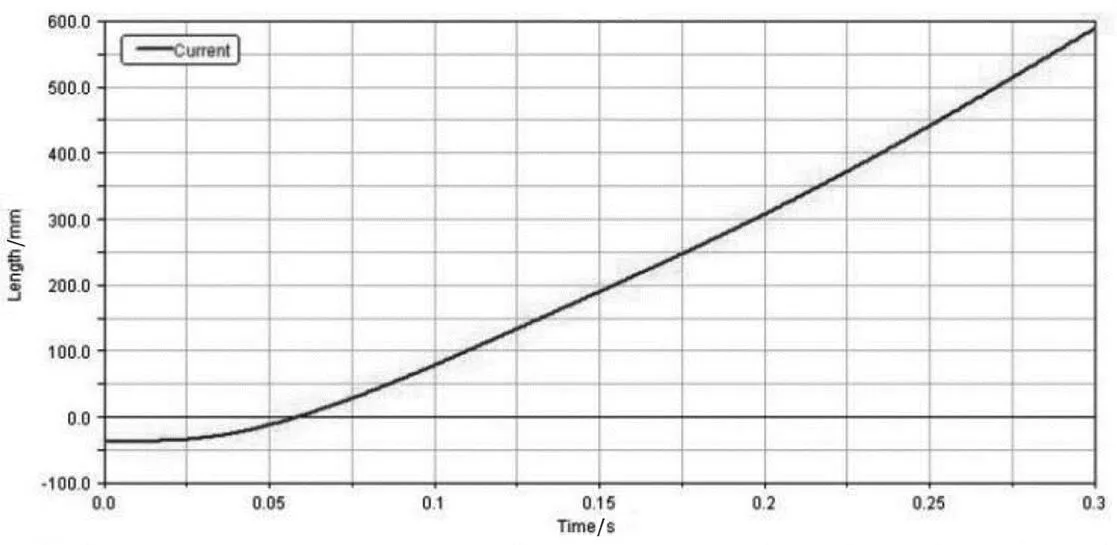
圖8 質心處x方向位移

圖9 質心處y方向位移
4.2.2 速度分析
腿部速度、質心方向速度和質心方向速度分別如圖10、圖11、圖12所示。從中可以看出,在0~0.05 s之間,速度是不斷升高的,模型在此階段跳躍時可以體現出突然性和爆發性,在極短的時間里速度迅速上升;而質心方向速度在0.08 s處曲線呈現下降的趨勢,是質心再往峰值點緩慢靠近的原因,在0.3 s左右達到峰值點后再為落地做準備。其中速度曲線不平滑或是存在突變都有可能是模型跳躍時系統不穩定造成的。

圖10 腿部速度

圖11 質心x方向速度

圖12 質心y方向速度
4.2.3 加速度分析
腿部加速度、質心方向加速度和質心方向加速度分別如圖13、圖14、圖15所示。從中可以看出,速度曲線變化大的同時加速度曲線也隨之變化,由于設置的驅動函數的關系,不管是腿部還是質心加速度在0.05 s和0.2 s時都有 突變,0.05 s時的突變是因為模型能體現出突然性和爆發性,0.2 s時的加速度突變是因為模型將要達到峰值時膝關節的姿態調整,目的是使開始進入落地狀態時系統更加穩定。
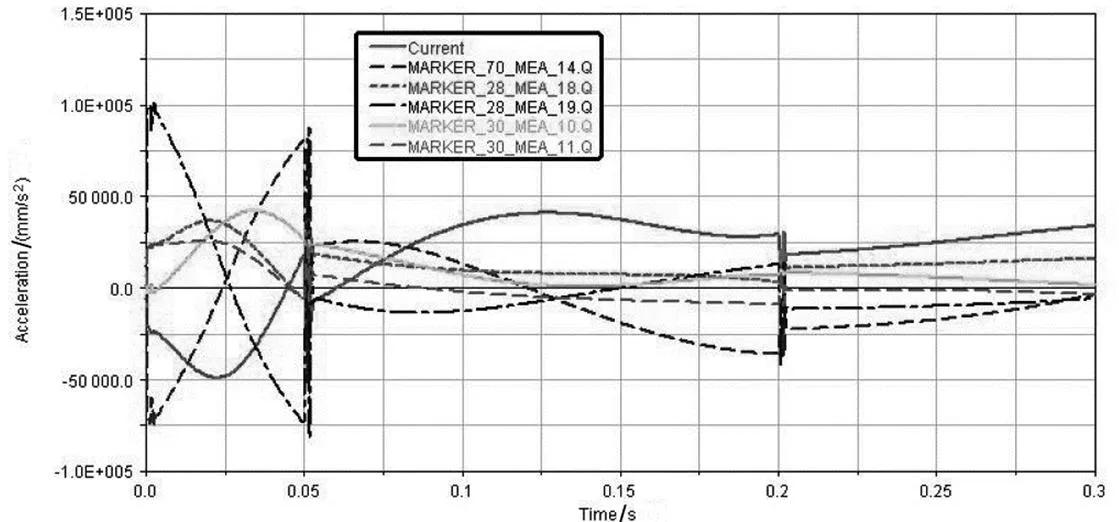
圖13 腿部加速度

圖14 質心x方向加速度

圖15 質心y方向加速度
4.2.4 力矩分析
建模時視各個部件為剛性桿件,跳躍初始時腳掌與地面沒有相對滑動,忽略關節間摩擦。按上述預設的關節運動軌跡,仿蚱蜢腿部跳躍機器人的關節力矩曲線如圖16所示。

圖16 各關節力矩
圖16中的力矩為各關節附加的動力矩,它反映了各個關節動力矩的變化趨勢、最大值和最小值。預期得到的力矩必須在這個范圍內才能保證跳躍的合理性和可行性。
當給予氣動肌肉一個的推力和曲柄滑塊機構一個向上的10 N的推力時,三個關節中,膝關節受到的力矩是最大的,在整個跳躍過程中,跗關節所受的力矩最小,其變化趨勢如圖17所示。

圖17 跗關節力矩
5 結論
通過在ADAMS虛擬環境中進行仿蚱蜢跳躍機器人的運動仿真,分析了仿蚱蜢腿式跳躍機器人在整個運動過程中的關節軌跡規律,并借用仿真數據對機器人和氣動肌肉的運動學方程進行驗證,使結果更加可靠,并且通過提取ADAMS仿真中的數據,計算了仿真中氣動肌肉的理論輸出力矩,結果顯示出了氣動肌肉在爆發性和高輸出方面的可行性。本文利用人工肌肉進行彈跳后腿的設計,為仿生跳躍機器人的研究提供了借鑒和參考。
[1]遲冬祥,顏國正.仿生機器人的研究現狀及其未來發展[J].機器人,2003,23(5):476-480.
[2]Wang M,Zang X Z,Fab J Z,et al.Biological jumping mechanism analysis and modelin for frog robot[J].Journal of Bionic Engineering,2008,5(3):181-188.
[3]Clark H.The energetic of the jump of the locust schistocerca gregaria[J].Journal of Experimental Biology,1975,63(1):53-83.
[4]Cochrane D,Elder H,Usherwood P.Physiology and ultrastructure of phasic and tonic skeletal musclefibers in the locust,schistocerca gregaria[J].Journal of Cell Science,1972(10):419-441.
[5]Burrows M,Morris G.The kinematics and neural control of high speed kicking movements in the locust[J].Journal of Experimental Biology,2001(204):3471-3481.
[6]楊繪宇,王石剛,梁慶華,等.仿蝗蟲跳躍機器人起跳過程運動學建模及分析[J].機械設計,2010,27(4):54-57.
[7]Parry D,Brown R.The jumping mechanism of salticid spiders[J].Journal of Experimental Biology,1959(36):654-664.
[8]Heitler W J.How grasshoppers jump[D].Scotland:The University of St Andrews,2007.
[9]Bennet-clark H C.The energetics of the jump of the locust schistocerca gregaria[J].The journal of experimental biology,1975(63):33-83.
熊勇剛(1966—),男,湖南株洲人,教授,博士,碩士研究生導師,主要研究方向為機械動力學、機械設計及理論。
彭未來。
湖南省自然科學基金項目(編號:2017JJ2065);國家自然科學基金資助項目(編號:51345005)
2095-6835(2018)23-0001-05
TP24
A
10.15913/j.cnki.kjycx.2018.23.001
〔編輯:嚴麗琴〕
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
