RFID技術(shù)在機(jī)器人定位系統(tǒng)中的應(yīng)用研究
2018-12-18 13:24:16賈桂秋
中國(guó)設(shè)備工程 2018年23期
賈桂秋
(遼寧思凱科技股份有限公司,遼寧 丹東 118002)
傳統(tǒng)移動(dòng)式機(jī)器人的定位系統(tǒng)多由編碼器與陀螺儀的所組成,在執(zhí)行導(dǎo)航任務(wù)時(shí)必須知道起點(diǎn)與終點(diǎn)之間的距離,事先對(duì)工作地點(diǎn)進(jìn)行檢測(cè),將環(huán)境信息建構(gòu)于數(shù)據(jù)庫(kù)中,才可由編碼器推算出目前位置,不過(guò)地圖的建置往往費(fèi)時(shí)費(fèi)力。此外,機(jī)器人在移動(dòng)過(guò)程中,輪子與地面有時(shí)會(huì)發(fā)生打滑,使編碼器產(chǎn)生測(cè)量上誤差。室內(nèi)機(jī)器人若以編碼器計(jì)算移動(dòng)的距離,在長(zhǎng)時(shí)間航行后會(huì)有累積誤差,且機(jī)器人移動(dòng)時(shí)所需的地圖信息,在建構(gòu)上往往費(fèi)時(shí)費(fèi)力。本研究以RFID系統(tǒng)作為無(wú)線通信接口,而定位算法則以接收信號(hào)強(qiáng)度定位法進(jìn)行定位,由于信號(hào)強(qiáng)度在檢測(cè)時(shí)會(huì)受到室內(nèi)環(huán)境的干擾而導(dǎo)致定位準(zhǔn)確度不佳,因此加入灰色預(yù)測(cè)法降低干擾對(duì)控制器的影響。依托室內(nèi)無(wú)線定位技術(shù)研制一套智能導(dǎo)航控制系統(tǒng),使得機(jī)器人能迅速正確地航行至目的地。
1 理論基礎(chǔ)
1.1 接收信號(hào)強(qiáng)度測(cè)距法
接收信號(hào)強(qiáng)度是以信號(hào)功率傳播模型為基礎(chǔ),來(lái)估測(cè)發(fā)射端與接收端的距離,無(wú)線電的電磁波在自由空間中傳播,其傳播距離越遠(yuǎn),能量密度越小。當(dāng)接收器在不同位置,所檢測(cè)的信號(hào)強(qiáng)度也會(huì)不同。
1.2 灰色預(yù)測(cè)法
灰色系統(tǒng)理論的特點(diǎn)在于只需很少的歷史數(shù)據(jù),即可對(duì)系統(tǒng)進(jìn)行建模產(chǎn)生灰色模型,灰色預(yù)測(cè)是以灰色模型為基礎(chǔ)所進(jìn)行的一種預(yù)測(cè)方法,以少量的歷史數(shù)據(jù)求得數(shù)據(jù)未來(lái)發(fā)展情形。
2 系統(tǒng)架構(gòu)
2.1 移動(dòng)式機(jī)器人
本研究輪式機(jī)器人硬件架構(gòu)共分為控制、電力、檢測(cè)、定位四大系統(tǒng),系統(tǒng)元件如表1所示。
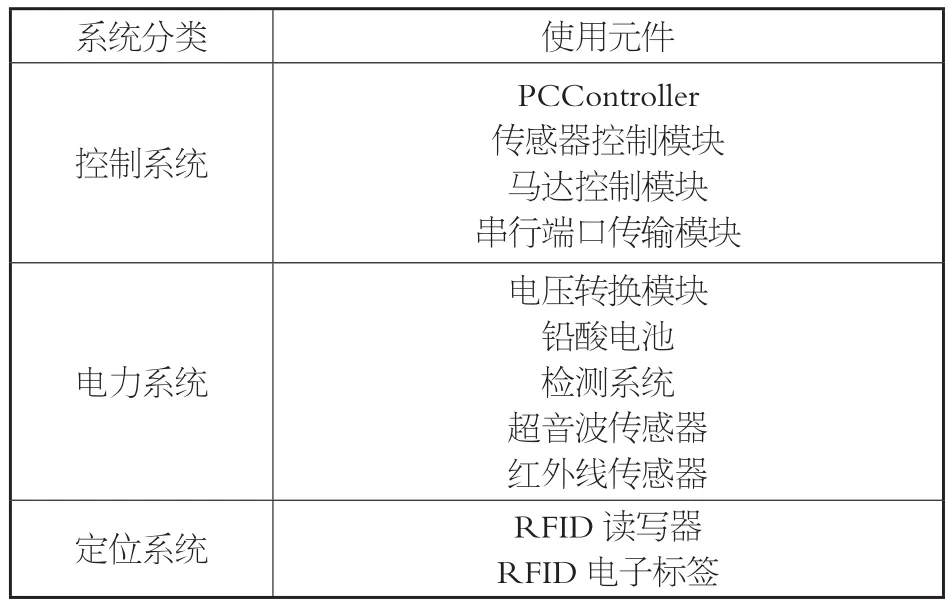
表1 機(jī)器人系統(tǒng)分類表
輪式機(jī)器人在定位上最大的問(wèn)題在于使用光電編碼器計(jì)算距離時(shí)會(huì)產(chǎn)生誤差,此誤差會(huì)不斷累積無(wú)法消除,因此本研究以RFID系統(tǒng)代替光電編碼器來(lái)解決累積誤差的問(wèn)題。
2.2 RFID系統(tǒng)
RFID是一種非接觸式自動(dòng)識(shí)別系統(tǒng),主要由讀寫器、電子標(biāo)簽、天線三個(gè)元件組成。本研究所采用讀寫器頻率為2.4GHz,電子標(biāo)簽為主動(dòng)式電子標(biāo)簽,標(biāo)簽是以電池作為電源。與讀寫器之間是通過(guò)反向散射耦合的方式傳輸,該傳輸方式傳輸距離較長(zhǎng),工作原理如圖1所示。
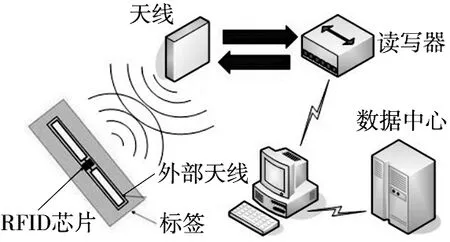
圖1 RFID傳輸原理示意圖
由讀寫器發(fā)出命令通過(guò)天線將信號(hào)發(fā)射出去,當(dāng)電子標(biāo)簽接收到信號(hào)后,則會(huì)驅(qū)動(dòng)內(nèi)部IC進(jìn)行邏輯運(yùn)算與數(shù)據(jù)處理后再將數(shù)據(jù)回傳給讀寫器。
圖2為RFID設(shè)備信號(hào)強(qiáng)度與距離關(guān)系曲線,水平軸為距離;垂直軸為信號(hào)強(qiáng)度,圖中圓點(diǎn)是在指定位置上所測(cè)得的信號(hào)強(qiáng)度,而實(shí)線則是將數(shù)據(jù)以二階曲線擬合的結(jié)果。

圖2 信號(hào)強(qiáng)度與距離關(guān)系曲線
2.3 灰色預(yù)測(cè)控制器
灰色預(yù)測(cè)控制器是以RFID系統(tǒng)為架構(gòu),包含RSS定位法以及灰色預(yù)測(cè)法的導(dǎo)航控制器。若信號(hào)強(qiáng)度為遞增時(shí),則進(jìn)入灰色預(yù)測(cè)模式;若信號(hào)強(qiáng)度非遞增時(shí),按三角測(cè)距法估測(cè)信號(hào)發(fā)射點(diǎn)坐標(biāo),修正移動(dòng)方向,直到到達(dá)目的地為止。機(jī)器人的移動(dòng)示意圖如圖3所示。
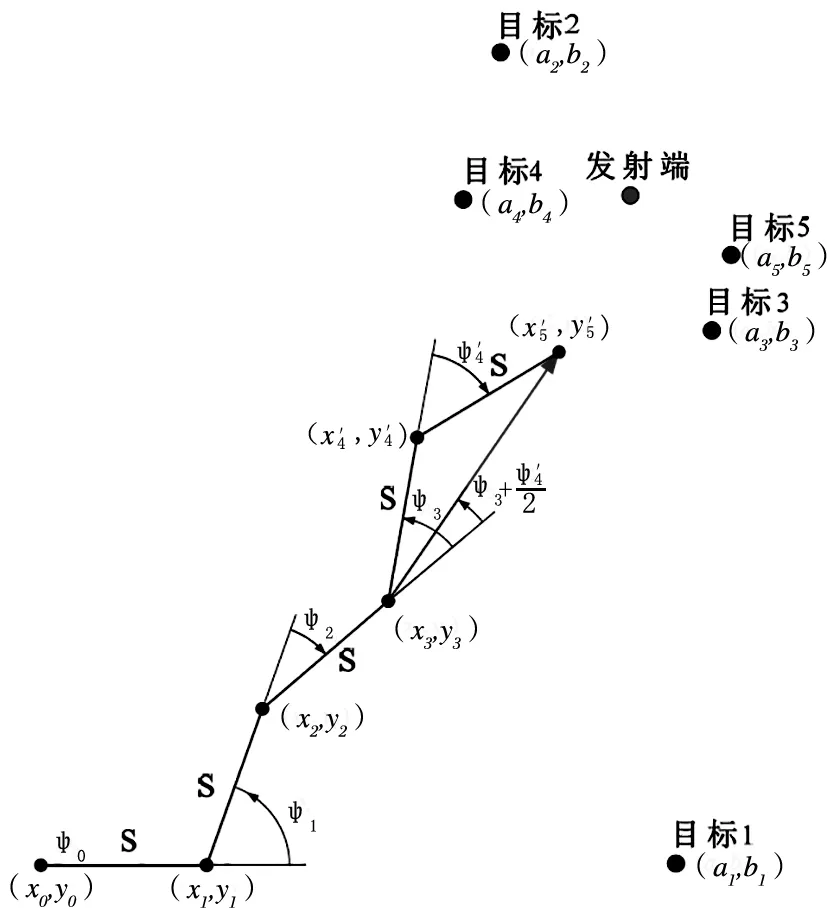
圖3 機(jī)器人移動(dòng)示意圖
3 實(shí)驗(yàn)驗(yàn)證
導(dǎo)航程序采用VB6.0語(yǔ)言編寫,實(shí)驗(yàn)中機(jī)器人由原點(diǎn)位置出發(fā),目標(biāo)點(diǎn)設(shè)在與機(jī)器人相距4m,與x軸夾60°角處,相當(dāng)于平面坐標(biāo)(200,346.5)的位置。如圖4所示,機(jī)器人最終停止坐標(biāo)為(232,300.5),與目的坐標(biāo)的距離誤差為56.03cm。
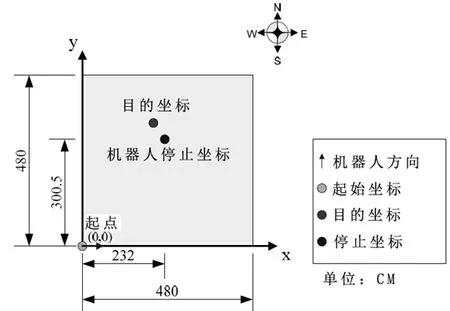
圖4 機(jī)器人移動(dòng)距離誤差
由此看出,灰色導(dǎo)航定位系統(tǒng)可將機(jī)器人與目標(biāo)點(diǎn)的距離誤差控制在半徑60厘米之內(nèi),能有效解決累積誤差的問(wèn)題。
4 結(jié)語(yǔ)
本研究解決機(jī)器人因使用光電編碼器計(jì)算位置坐標(biāo)時(shí)產(chǎn)生累積誤差的問(wèn)題,以RFID技術(shù)代替?zhèn)鹘y(tǒng)光電編碼器,使用RSS定位法計(jì)算目標(biāo)點(diǎn)坐標(biāo),為避免機(jī)器人移動(dòng)時(shí)不必要的旋轉(zhuǎn),導(dǎo)入灰色預(yù)測(cè)法計(jì)算機(jī)器人的旋轉(zhuǎn)角度,提出以灰色預(yù)測(cè)法結(jié)合RSS定位法的灰色導(dǎo)航定位系統(tǒng)。由實(shí)驗(yàn)可知,灰色導(dǎo)航定位系統(tǒng)可將機(jī)器人與目標(biāo)點(diǎn)的距離誤差控制在半徑60cm之內(nèi),能夠有效地解決累積誤差的問(wèn)題。本導(dǎo)航系統(tǒng)以RFID進(jìn)行定位,只需將電子標(biāo)簽設(shè)置于目標(biāo)處,機(jī)器人即可自行追蹤進(jìn)行導(dǎo)航,可應(yīng)用于不同的工作地點(diǎn),節(jié)省系統(tǒng)開發(fā)時(shí)間。