手機機身輪廓分段定位檢測方法研究
2018-12-28 03:56:22宋照肅
自動化儀表 2018年12期
蘇 波,宋照肅
(河南理工大學電氣工程與自動化學院,河南 焦作 454000)
0 引言
在工業生產過程中,要求手機邊框關鍵位置的檢測具有一定的精度和速度。傳統檢測方法的精度和速度都有一定的局限性,已經很難滿足現代化工業的要求。手機機身輪廓定位檢測的難點就是圓弧的查找以及與直線邊緣的銜接。采用現代機器視覺檢測技術,通過圖像處理來完成工業測量檢測,具有非接觸、柔性好、精度高、速度快、自動化和智能化水平高等優點,可以很好地滿足現代化工業生產的要求,確保產品的質量[1-2]。
本文利用機器視覺軟件halcon搭建的檢測系統,通過圖像預處理、擬合參數等步驟,得到手機邊框的輪廓。
1 成像模型中參數的確定
成像模型中,參數的確定是通過標定過程實現的。在精密測量領域,標定環節是實現和保證精度的關鍵[3]。對于視覺測量而言,被測對象除通過分析二維圖像特征坐標得到的光學成像外,還涉及圖像傳輸、圖像處理、結構設計、系統組建等多個環節,使精度控制和標定問題更加突出。
此局部標定可消除引入激光BOX的誤差,構建CCD圖像坐標系與激光打標坐標系之間的轉換關系。局部標定的原理是:利用激光打標圖檔,在3M紙上相應成型薄膜(in modling film,IMF)輪廓線位置周圍打出圓的陣列,同時打出六個比較大的Mark點。Mark點分別分布在打標圖檔的上、中、下三個部分,每個部分各兩個。打標圖檔中,所有圓的坐標都是已知的。打標好的3M紙在CCD下,分別保存IMF在三個位置的圖像。標定過程中,利用Mark點把圖像旋轉正,對圓的陣列區域進行切分。每四個圓切分成一個小區域,然后在小區域內進行標定,并計算出小區域內CCD
圖像坐標系與激光打標坐標系之間的轉換關系,俗稱轉換矩陣。對于小區域內圖像坐標系下的坐標,可以利用對應的小區域轉換矩陣,計算出在激光打標坐標系內的相對坐標。
2 檢測系統構成及規格參數
2.1 系統構成
機器視覺的檢測系統主要通過工業面陣相機采集圖像,工業相機進行標定;利用機器視覺軟件halcon處理相機采集到的圖像,并通過典型邊緣檢測方法找出手機邊框的各個直邊;通過邊緣擬合方法,找到手機邊框的輪廓。
檢測系統流程如圖1所示。

圖1 檢測系統流程圖
2.2 規格參數
硬件主要由工業面陣相機、光學鏡頭、可調節光源、運動控制平臺等組成,圖像處理模塊主要由Halcon和VC++編程軟件組成。系統硬件和軟件參數如表1所示。
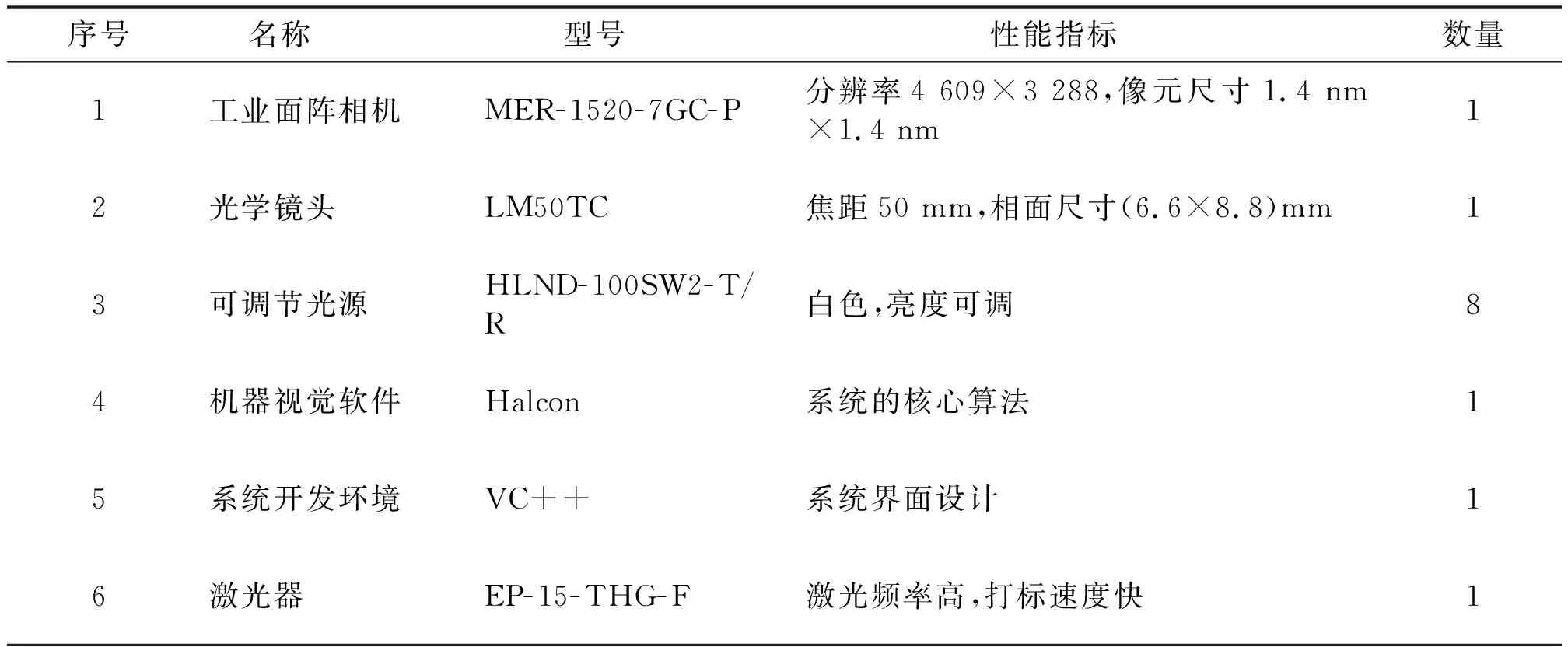
表1 系統硬件和軟件參數
采用工業面陣相機、光學鏡頭、計算機以及機器視覺軟件halcon等部件,搭建一個簡易的機器視覺檢測系統。該檢測系統結構如圖2所示。
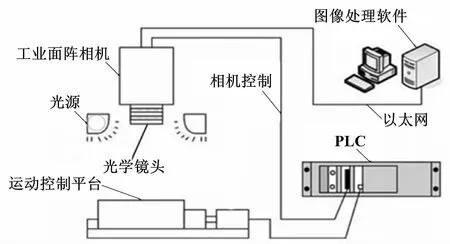
圖2 檢測系統結構圖
3 圖像處理
視覺測量中的圖像處理大都包括預處理和精密處理兩個環節。預處理是在保證算法穩定性的前提下實現特征的概略定位分析,消除對特征提取敏感的噪聲數據和冗余信息,為后續的精密處理作準備。常用的預處理方法主要包括圖像濾波、特征增強、區域分割和邊緣檢測等[4-7]。將手機邊框分上、中、下三部分,每部分獨立定位輪廓,再利用三部分各自的基準點進行拼接,以形成一個完整的閉合輪廓[8-9]。
3.1 拉普拉斯高斯算子
由于拉普拉斯(Laplacian)算子對噪聲特別敏感,為了減少噪聲的影響,Marr與Hildreth將高斯函數與Laplacian算子相結合,提出了拉普拉斯高斯(Laplacian of Gaussian,LoG)算子。其基本思想是先用高斯函數進行平滑處理,再用Laplacin算子進行邊緣檢測。
采用LoG算子,對手機邊框的邊緣進行平滑和檢測:先找到各個邊以及圓弧,再利用基準點的坐標信息形成閉合輪廓。
對于圖像f(x,y),首先用高斯函數G(x,y)與圖像作卷積平滑噪聲,表示為:
g(x,y)=G(x,y)×f(x,y)
(1)
對平滑后的圖像g(x,y)求二階導數。由線性系統中卷積和導數的可交性得到:
(2)
(3)
根據式(3)可知,參數σ越大,平滑程度越顯著,對噪聲的抑制效果越好。在實際應用中,根據噪聲和邊緣定位要求來選取參數。
3.2 邊框模板的建立
邊緣查找有找點模式和定位模式兩種,分別適用于建模和模板匹配。定位模式的優點是在進行圓弧查找的過程中,即使部分少量的點沒有找到,仍然可以很好地擬合出圓弧;但該模式的精度不及找點模式。
將手機邊框分成上、中、下三部分,對每一部分分別建立模板,再根據各自的基準點擬合成一個完整的輪廓。
(1)上半部分:利用LoG找邊算法,分別找出左側邊緣、右側邊緣、上側邊緣。
①找邊算法在建模界面上開放了相關參數,比如取點方向、取點方式、閾值、平滑系數、找邊寬度,方便調整參數抓取更真實的邊界。
②根據找到的左邊緣和上邊緣端點,依次生成生成卡尺找點工具;調整左圓弧參數找出圓弧邊界點,把一系列的點擬合出來并生成左圓弧。如果找點模式生成的左圓弧邊界很好,可以以此左圓弧創建左圓弧定位模板,設置左側基準點,跟隨定位模式下的幾何定位中心,為定位模式作準備。
③根據找到上邊緣和右邊緣的端點,依次生成卡尺找點工具,調整右圓弧參數找出圓弧邊界點,把一系列的點擬合并生成右圓弧。如果找點模式生成的右圓弧邊界很好,可以以此右圓弧創建右圓弧定位模板,設置右側基準點,跟隨定位模式下的幾何定位中心,為定位模式作準備。
④對左邊緣、左圓弧、上邊緣、右圓弧、右邊緣進行擬合,生成上半部分輪廓。
(2)中間部分:利用2D找邊算法分別找出左側邊緣、右側邊緣。
①找邊算法在建模界面上進行了相關參數開放,比如取點方向、取點方式、閾值、平滑系數、找邊寬度,方便調整參數抓取更真實的邊界。
②根據找到的左右兩側直線,生成中間部分的兩段輪廓。
(3)下半部分輪廓查找步驟與上半部分相同,在此不作贅述。
3.3 最小二乘模板匹配法
最小二乘模板匹配法具有精度高、穩定性和靈活性強等優點,是目前應用廣泛的高精度模板匹配方法[10-11]。利用最小二乘模板匹配方法實現特征邊緣提取,由于被測特征模式在測量前已知,根據被測特征的預定模式,通過數學分析的方法生成一個理想的小塊邊緣模板。將此模板與測量圖像進行匹配,精確提取特征的邊緣位置,進而利用解析方法求解被提取特征的特征點。
設f(x,y)為給定模板的灰度、g(x,y)為測量圖像匹配窗口的灰度。由于模板與測量圖像的匹配子圖間存在放射變換,有:
(4)
式中:(xf,yf)為給定模板上的點;(xg,yg)為測量圖像中的對應點。
匹配過程就是解算出變換參數(a0,a1,a2,b0,b1,b2)。由于待提取邊緣點在給定模板上的精確坐標已知,在獲得精確變換參數的情況下,即可得到測量圖像中待提取邊緣點的精確位置。g(xg,yg)在a0=0、a1=1、a2=0、b0=0、b1=b2=1處展開成泰勒級數,結合式(4),有:

(5)
式中:(da0,da1,da2,db0,db1,db2)為變換參數(a0,a1,a2,b0,b1,b2)的改正數。
由式(5)可知,對應點的灰度差為:

(6)
依據最小二乘法準則可知,方均誤差最小,因此有:
(7)
式中:求和符號是對窗口內的所有像素點求和。
(8)
由式(7)可推出下列矩陣方程:
(9)
式中:Δ=g(xf,yf)-f(xf,yf)。
求解此矩陣方程,即可獲得變換參數的改正數(da0,da1,da2,db0,db1,db2)。
最小二乘法是一個迭代的過程。將第一步的粗提取結果作為變換參數的迭代值,根據矩陣方程求解變換參數的改正數,進而用改正后的參數對測量圖像中的點進行重采樣。計算模板與匹配子圖的相關系數;若相關系數大于預定閾值,則迭代結束計算出最優匹配位置和相應的誤差;否則,重復迭代過程。應用最小二乘模板匹配法,通常將測量圖像中的待匹配子圖像旋轉成水平影像,采用一維搜索實現匹配。
4 重復性試驗和穩定性試驗
4.1 重復性試驗
為了確定邊緣檢測系統的重復測量精度,采用傳統的檢測方法對大量物料進行邊緣檢測,以查看各個直邊和圓弧并且測量其誤差。該系統要求誤差在0.01 mm以內。對10片物料分別進行邊緣檢測,并測得誤差。
根據式(9),對數據進行平均誤差的計算。
(10)
式中:xi為第i次測量的數據;u(x)為平均誤差。
由以上結果得出本系統的平均誤差為0.002 9 mm。
4.2 穩定性試驗
該系統要求物料邊緣的檢測誤差必須在0.001 mm以內。對10片物料分別進行邊緣檢測,再將其放在檢測系統的測量位置進行100次測量,利用圖像處理技術獲取其像素值。檢測結果表明,該系統檢測基本無誤,具有一定的可行性。
5 結束語
通過對物料邊緣的視覺檢測簡易系統的分析,利用COMS相機對物料進行實時圖像采集,并進行圖像增強、圖像分割、圖像細化等一系列預處理操作。運用計算機視覺halcon軟件庫中的編寫代碼程序對手機機身輪廓分段定位檢測,從而獲取輪廓的直線邊和圓弧處的位置像素值;再利用基準點對圖像進行拼接,形成一個完整的閉合輪廓。在圖像處理界面上建立手機邊框的模板,再利用最小二乘模板匹配方法進行模板匹配。同時,對重復性和穩定性進行了試驗分析。試驗結果表明,該測量系統的精度可達0.001 mm,平均誤差達到0.002 9 mm,滿足測量要求。該系統具有一定的可靠性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
