基于步進(jìn)電機(jī)的工業(yè)取料機(jī)械手的定位控制
2018-12-28 20:41:40李偉成
科學(xué)與財(cái)富 2018年30期
李偉成
摘 要:文章首先對(duì)步進(jìn)電機(jī)和機(jī)械手的結(jié)構(gòu)進(jìn)行了分析,然后對(duì)步進(jìn)電機(jī)工業(yè)取料機(jī)械手的硬件設(shè)計(jì)與軟件設(shè)計(jì)進(jìn)行了分析,以便更好的促進(jìn)PLC控制的步進(jìn)電機(jī)在注塑取料機(jī)械手中的廣泛應(yīng)用,不斷提高機(jī)械手的定位精度,縮短步進(jìn)電機(jī)的升降時(shí)間,從而提高產(chǎn)品的生產(chǎn)效率。
關(guān)鍵詞:步進(jìn)電機(jī);機(jī)械手;定位控制
引言
機(jī)械手是近代自動(dòng)控制領(lǐng)域中出現(xiàn)的一項(xiàng)新技術(shù),也是現(xiàn)代工業(yè)生產(chǎn)中的一個(gè)重要組成部分。當(dāng)前對(duì)于工業(yè)取料機(jī)械手的控制方法主要采用液壓或者氣壓驅(qū)動(dòng),這兩種方法的控制精度不高,并且不利于生產(chǎn)過程的自動(dòng)化,而步進(jìn)電機(jī)控制的工業(yè)取料機(jī)械手定位方法的應(yīng)用,不僅能夠提高產(chǎn)品的生產(chǎn)效率,還能夠保障相關(guān)工作人員的人身安全,降低生產(chǎn)成本。
1步進(jìn)電機(jī)和機(jī)械手的概述
1.1步進(jìn)電機(jī)的概述
步進(jìn)電機(jī)是一種運(yùn)動(dòng)執(zhí)行部件,其具有缺乏積累誤差的特點(diǎn),并可以將電脈沖信號(hào)轉(zhuǎn)換為角位移,從而被廣泛應(yīng)用于各種開環(huán)控制中。同時(shí),相關(guān)人員可以通過發(fā)送脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的,并且其還可以通過控制脈沖頻率來對(duì)電動(dòng)機(jī)的速度和加速度進(jìn)行控制,從而達(dá)到調(diào)速目的。此外,要想將步進(jìn)電機(jī)安裝在PLC上,需要步進(jìn)電機(jī)驅(qū)動(dòng)器進(jìn)行支持,而典型的步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)主要由控制器、驅(qū)動(dòng)器和步進(jìn)電機(jī)三部分組成。
1.2機(jī)械手的概述
1.2.1機(jī)械手的結(jié)構(gòu)與工作原理
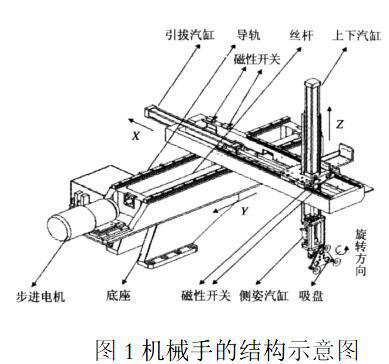
機(jī)械手主要是由機(jī)械手臂、電機(jī)、聯(lián)軸器、絲杠、導(dǎo)軌、吸盤、底座以及氣缸等零部件組成,如圖1所示。而對(duì)于機(jī)械手的工作原理主要包括以下幾個(gè)方面:第一,在X方向選用普通氣缸作為驅(qū)動(dòng),直線導(dǎo)軌為導(dǎo)向;第二,在Z方向選用高速氣缸作為驅(qū)動(dòng);第三,在Y方向采用不僅電機(jī)驅(qū)動(dòng)絲杠的傳動(dòng)方式;第四,在Y自由度上設(shè)有限位開關(guān),而在X、Z自由度上、汽缸以及吸盤旋轉(zhuǎn)汽缸設(shè)有磁性開關(guān),從而限定機(jī)械手移動(dòng)范圍及進(jìn)行限位保護(hù)。
1.2.2機(jī)械手控制系統(tǒng)組成
機(jī)械手控制系統(tǒng)是采用PLC進(jìn)行控制,而當(dāng)中橫入橫出的部分為了達(dá)到機(jī)械手的精確定位,則是采用步進(jìn)電機(jī)進(jìn)行控制。另外,為了實(shí)現(xiàn)控制電機(jī)啟停的平穩(wěn)性與快速性,要對(duì)步進(jìn)電機(jī)的速度進(jìn)行相應(yīng)的設(shè)計(jì),以便實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)升降速度的控制。同時(shí),電機(jī)是通過聯(lián)軸器帶動(dòng)絲杠并帶動(dòng)機(jī)械臂沿直線導(dǎo)軌橫入橫出,而引拔、上下行、旋轉(zhuǎn)、抓取部分則全部采用氣動(dòng)控制,同時(shí)采用觸摸屏進(jìn)行人機(jī)對(duì)話十分直觀。另外,機(jī)械手控制系統(tǒng)的工作模式可以分為全自動(dòng)模式、單循環(huán)模式以及手動(dòng)模式三種,在實(shí)際的應(yīng)用過程中可以根據(jù)用戶的實(shí)際需求進(jìn)行選擇,從而不僅提高了產(chǎn)品的生產(chǎn)效率,還為相關(guān)人員的生命安全及財(cái)產(chǎn)安全提供了保障。
2基于步進(jìn)電機(jī)工業(yè)取料機(jī)械手的硬件與軟件設(shè)計(jì)
2.1硬件設(shè)計(jì)
2.1.1電機(jī)控制
為了能夠使電機(jī)運(yùn)行的速度保持平穩(wěn)性并達(dá)到更高的定位精度,就要對(duì)步進(jìn)電機(jī)的升降速進(jìn)行嚴(yán)格的控制。步進(jìn)電機(jī)升降速是由輸入脈沖控制,而其轉(zhuǎn)速則是由輸入脈沖的頻率所決定,并且不會(huì)累積旋轉(zhuǎn)角的誤差。同時(shí),在高精度、大負(fù)載的工業(yè)取料機(jī)械手中,因機(jī)械手的慣性所引起的步進(jìn)電機(jī)失步、過沖等問題都會(huì)對(duì)機(jī)械手的定位精度產(chǎn)生極大的影響。所以,為了保證步進(jìn)電機(jī)不失步、不過沖,實(shí)現(xiàn)機(jī)械手的精確定位,就要對(duì)步進(jìn)電機(jī)的控制脈沖頻率進(jìn)行有效調(diào)節(jié)。此外,對(duì)于步進(jìn)電機(jī)升降速的控制通常表現(xiàn)在升降速曲線中,而常用的步進(jìn)電機(jī)升降速曲線包括直線升降速、指數(shù)曲線升降和拋物線升降速等。經(jīng)過一系列的實(shí)踐研究表明,當(dāng)步進(jìn)電機(jī)升降速曲線中的轉(zhuǎn)速上升時(shí),轉(zhuǎn)矩會(huì)隨速度接近于線性下降,并且這個(gè)轉(zhuǎn)矩是電磁轉(zhuǎn)矩和阻力矩之間的差值。
2.1.2氣動(dòng)控制
為了使氣缸運(yùn)行速度比較平穩(wěn),不斷提高機(jī)械手的穩(wěn)定性和工作效率,從而在機(jī)械手氣動(dòng)控制系統(tǒng)的每一個(gè)獨(dú)立啟動(dòng)回路中配備了單向節(jié)流閥,并且因運(yùn)用的慣性和氣體具有可壓縮性,導(dǎo)致在氣缸運(yùn)動(dòng)到滿量程時(shí),如果停止氣缸就會(huì)產(chǎn)生較大的沖擊和噪聲,所以在每個(gè)氣缸接近滿量程時(shí)要配備磁性開關(guān),從而當(dāng)氣缸運(yùn)行接觸到磁性開關(guān)時(shí),電磁閥斷電而氣缸因慣性作用繼續(xù)運(yùn)動(dòng),以便實(shí)現(xiàn)較好的緩沖效果,減小沖擊與噪聲。此外,由于PLC控制電磁閥的通斷實(shí)現(xiàn)了機(jī)械手在各自由度的運(yùn)動(dòng),而在實(shí)際的生產(chǎn)過程中,因X方向運(yùn)動(dòng)行程較小,運(yùn)動(dòng)速度較低,中間行程不可調(diào)等原因可選用普通汽缸進(jìn)行驅(qū)動(dòng),直線導(dǎo)軌作為導(dǎo)向;而在Z方向,為提高生產(chǎn)效率,縮短在該自由度方向的運(yùn)動(dòng)時(shí)間,可以選用高速汽缸作為驅(qū)動(dòng)。
2.2軟件設(shè)計(jì)
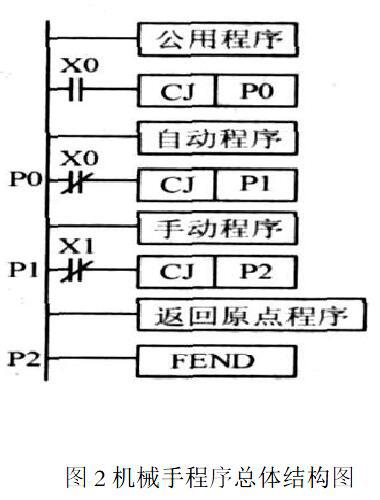
機(jī)械手控制系統(tǒng)包括手動(dòng)、單步、連續(xù)、單周期以及回原點(diǎn)五種工作方式,當(dāng)機(jī)械手在電磁線圈斷電時(shí),稱為系統(tǒng)處于原點(diǎn)狀態(tài)。同時(shí),圖2是機(jī)械手PLC梯形圖的總體結(jié)構(gòu)圖,其包括功用程序、手動(dòng)程序、回原位程序和自動(dòng)程序四個(gè)部分,其中自動(dòng)程序又包括系統(tǒng)工作在全自動(dòng)模式下的程序和系統(tǒng)工作在單循環(huán)模式下的程序。而在梯形圖中X0為手/自動(dòng)選擇開關(guān),X1為返回原點(diǎn)開關(guān),將其合在一起編程比較簡(jiǎn)單,同時(shí)在梯形圖中使用跳轉(zhuǎn)指令能夠使自動(dòng)程序、手動(dòng)程序和返回原點(diǎn)程序不同時(shí)執(zhí)行,從而為機(jī)械手的穩(wěn)定性和工作效率的提升提供了有效保障。
結(jié)束語
總而言之,用PLC控制的步進(jìn)電機(jī)定位法對(duì)工業(yè)取料機(jī)械手進(jìn)行控制,能夠?qū)刂埔笞鞒隹焖佟?zhǔn)確的反映,并實(shí)現(xiàn)對(duì)各自由度步進(jìn)電機(jī)運(yùn)行的合理精確定位控制,改善了機(jī)械運(yùn)行平穩(wěn)性,縮短了步進(jìn)電機(jī)的升降實(shí)踐,從而方便、快捷的實(shí)現(xiàn)了機(jī)械手位置控制,提高了勞動(dòng)生產(chǎn)率。
參考文獻(xiàn):
[1]郭艷萍,張超英.基于PLC的工業(yè)機(jī)械手控制系統(tǒng)[J].儀表技術(shù)與傳感器,2007(09):31-32+56.
