RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P椭貥?gòu)研究
2019-01-05 01:19:34薛衛(wèi)星花向紅李清泉邱衛(wèi)寧
測(cè)繪工程 2019年1期
薛衛(wèi)星,花向紅,李清泉,邱衛(wèi)寧
(1.武漢大學(xué) 測(cè)繪學(xué)院,湖北 武漢,430079;2.武漢大學(xué) 災(zāi)害監(jiān)測(cè)與防治研究中心,湖北 武漢 430079;3.深圳大學(xué) 空間信息智能感知與服務(wù)深圳市重點(diǎn)實(shí)驗(yàn)室,廣東 深圳 518060)
隨著信息技術(shù)的迅猛發(fā)展,室內(nèi)定位技術(shù)得到快速發(fā)展。在各種室內(nèi)定位技術(shù)中,基于RSS(基于接收信號(hào)強(qiáng)度定位技術(shù))[1]的定位方法因成本低廉、覆蓋面廣泛和無(wú)需添加任何硬件設(shè)備[2]等優(yōu)點(diǎn),已經(jīng)成為室內(nèi)定位的主流定位方法。位置指紋數(shù)據(jù)庫(kù)的建立是Wi-Fi室內(nèi)導(dǎo)航定位系統(tǒng)的重要方面,主要有離線階段采集指紋參考點(diǎn)RSS樣本建立位置指紋數(shù)據(jù)庫(kù)和采用傳播模型法建立數(shù)據(jù)預(yù)測(cè)數(shù)據(jù)庫(kù)兩種方法。離線階段建立參考點(diǎn)RSS位置指紋數(shù)據(jù)庫(kù)采用幾何布網(wǎng)的方法,類似于控制網(wǎng)的建立與加密;傳播模型法建立數(shù)據(jù)預(yù)測(cè)數(shù)據(jù)庫(kù)則是采用一部分參考點(diǎn)的RSS樣本建立傳播模型,再用該傳播模型進(jìn)行剩余參考點(diǎn)RSS樣本的預(yù)測(cè),從而建立實(shí)測(cè)數(shù)據(jù)和預(yù)測(cè)數(shù)據(jù)相結(jié)合的指紋數(shù)據(jù)庫(kù)。
本文在RSS幾何空間特征點(diǎn)構(gòu)建指紋庫(kù)的精度分析和RSS歐氏空間信號(hào)特征點(diǎn)信號(hào)模型重構(gòu)的精度分析的基礎(chǔ)上,對(duì)不同類型的特征點(diǎn)賦予不同的權(quán)值,并利用低秩矩陣填充理論,提出了RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P偷闹貥?gòu)算法。給出了RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P椭貥?gòu)的步驟,通過實(shí)驗(yàn)說(shuō)明了算法的可行性。
1 低秩矩陣填充理論
根據(jù)信號(hào)重構(gòu)的經(jīng)典定律奈奎斯特采樣定理[3],利用信號(hào)采樣值信號(hào)重構(gòu)時(shí),信號(hào)的采樣率至少應(yīng)該達(dá)到信號(hào)帶寬的2倍以上,才能實(shí)現(xiàn)信號(hào)的逼真重構(gòu)。近些年來(lái),Candes[4]與Donoho D L[5]等人相繼提出完善的壓縮傳感技術(shù),逐漸成為圖像處理和信號(hào)處理等方面的研究熱點(diǎn)。壓縮傳感技術(shù)通過測(cè)量矩陣的轉(zhuǎn)換理論,將高維空間的稀疏信號(hào)進(jìn)行壓縮進(jìn)而投影到一個(gè)低維空間上;再通過該信號(hào)的稀疏性或可壓縮性,從而降低信號(hào)采樣的數(shù)據(jù)量,同時(shí)通過某些信號(hào)重構(gòu)的算法再準(zhǔn)確地重新構(gòu)造出信號(hào)的真實(shí)分布情況。稀疏性是指矩陣中的大部分元素的數(shù)值為0,而數(shù)值不為0的元素的個(gè)數(shù)相對(duì)比較少[6-14]。
低秩矩陣填充理論是基于壓縮傳感技術(shù)的,主要解決如何在稀疏的誤差中恢復(fù)填充出低秩矩陣的問題。矩陣的低秩性是指矩陣的秩遠(yuǎn)遠(yuǎn)小于矩陣的行數(shù)和列數(shù)[15]。假設(shè)目標(biāo)定位區(qū)域是一個(gè)m×n個(gè)指紋點(diǎn)進(jìn)行數(shù)據(jù)采樣的矩形區(qū)域,則每個(gè)AP都將會(huì)形成一個(gè)信號(hào)強(qiáng)度m×n的采樣矩陣。傳統(tǒng)的位置指紋定位法是在每個(gè)指紋點(diǎn)上進(jìn)行RSS數(shù)據(jù)采樣測(cè)量,但是這樣采樣的工作量很大;假設(shè)只采集一個(gè)小規(guī)模的采樣點(diǎn)子集,那么就需要用低秩矩陣填充理論來(lái)重新構(gòu)造出整個(gè)目標(biāo)定位區(qū)域的二維矩陣。圓圈點(diǎn)上進(jìn)行了實(shí)際數(shù)據(jù)采樣測(cè)量的位置指紋采樣點(diǎn),其他區(qū)域需要我們用低秩矩陣填充理論來(lái)填充,如圖1所示。
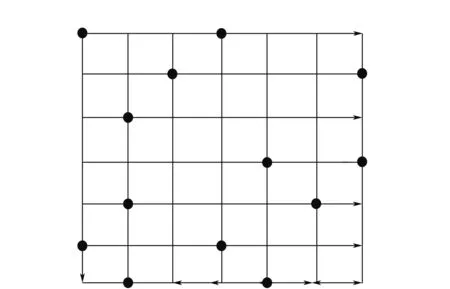
圖1 采樣示意圖
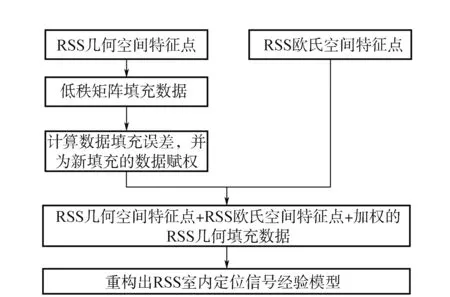
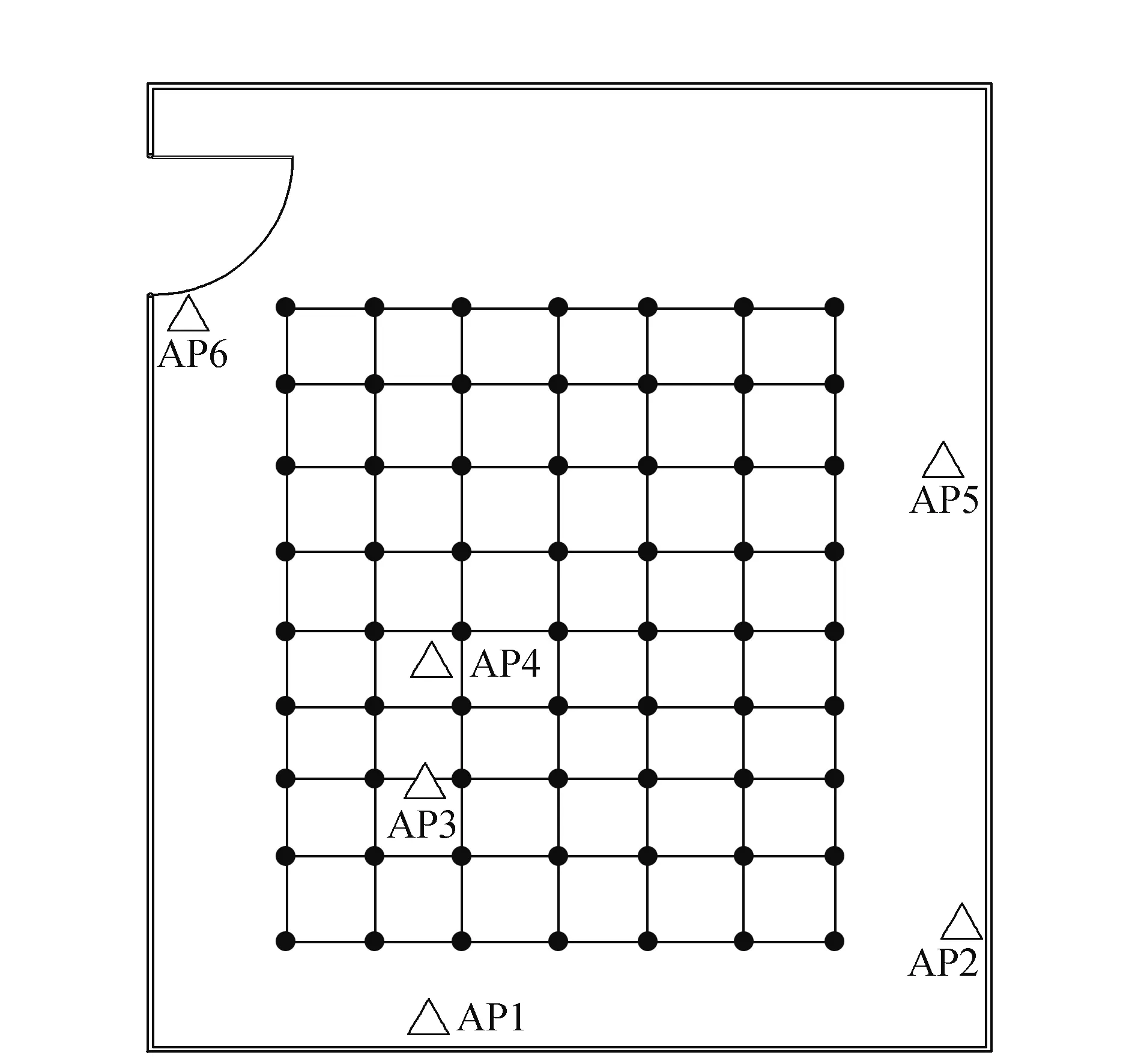
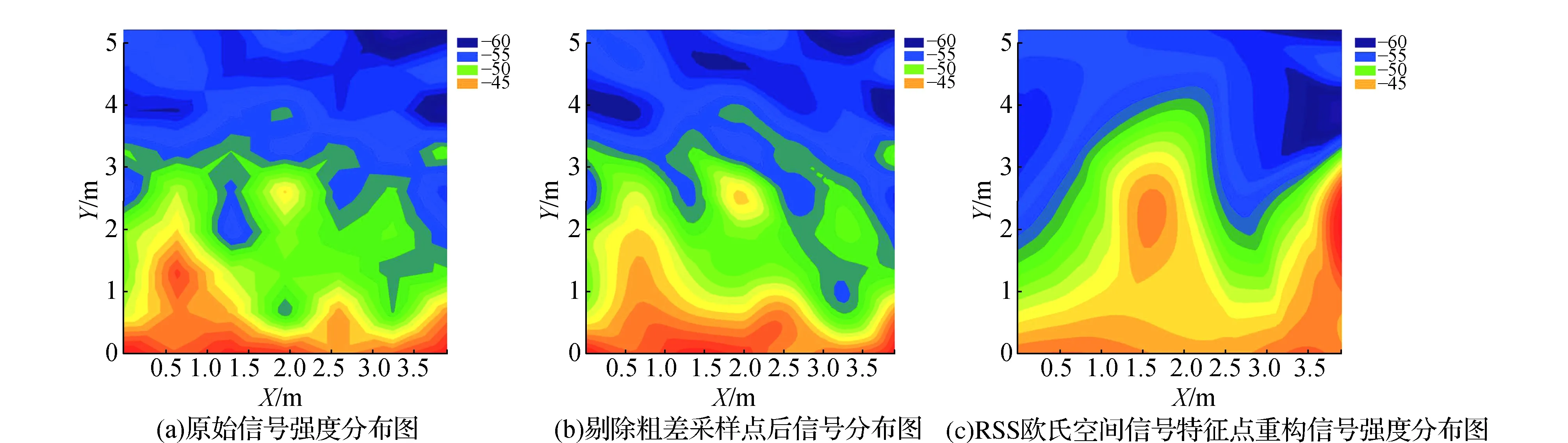
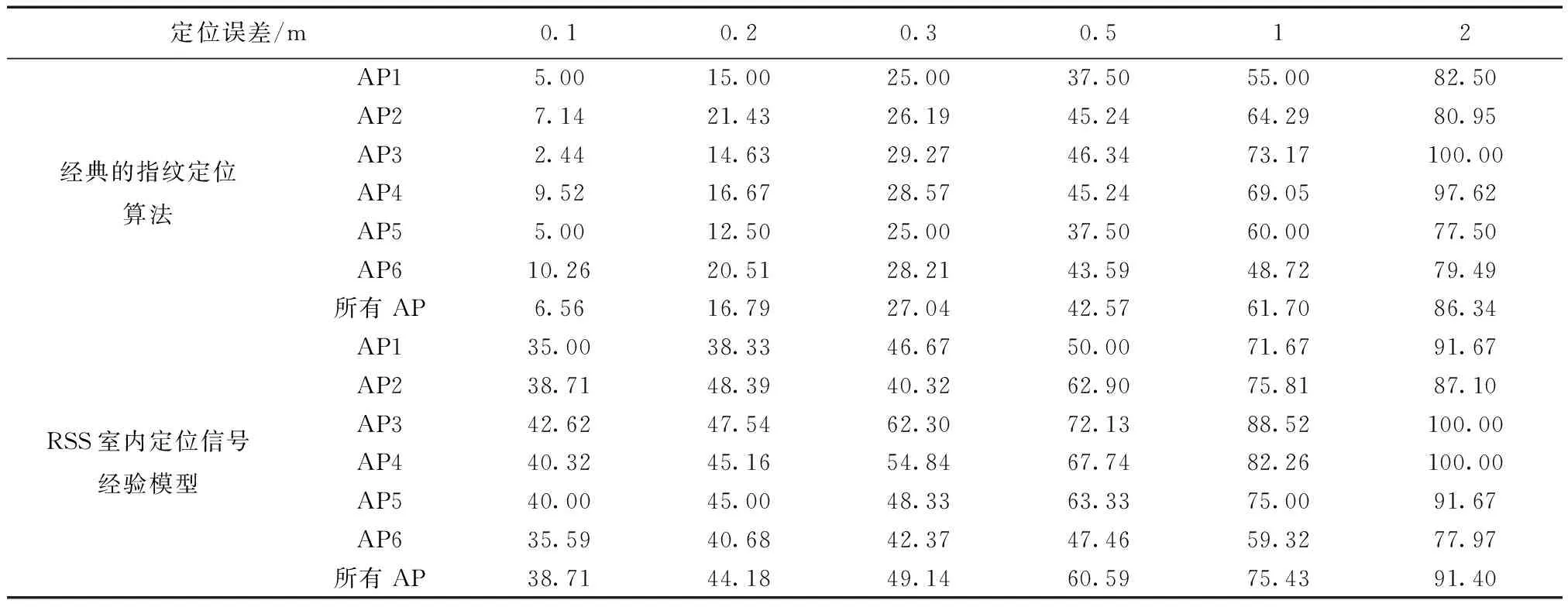
把目標(biāo)定位區(qū)域的某個(gè)AP源的信號(hào)強(qiáng)度RSS采樣數(shù)據(jù)定義為矩陣X,所有采樣格網(wǎng)點(diǎn)的個(gè)數(shù)N即該矩陣的元素個(gè)數(shù)N;但是在實(shí)際采樣時(shí),只測(cè)量目標(biāo)定位區(qū)域隨機(jī)選擇的s(s 因?yàn)橄M麑?shí)際采集數(shù)據(jù)的工作量降低,即指紋點(diǎn)越少越好,這就要用到仿射矩陣秩最小化的理論,即 s.t.A(X)=b. (1) s.t.A(X)=b. (2) 如何使得(2)的解是(1)的解,Recht B等,給出了以下條件[16]: 假設(shè)1≤r≤m≤n,秩為r的矩陣X0滿足參數(shù)為μ的并且只與矩陣X0的奇異值向量相關(guān)的強(qiáng)非相干條件,如果觀測(cè)元素位置是隨機(jī)均勻分布的s個(gè)采樣點(diǎn),那么存在一個(gè)正的常數(shù)C,使當(dāng) s≥Cμ4n(logn)2, (3) 時(shí),矩陣X0至少以1-n-3概率收斂為以上優(yōu)化問題的唯一確定解。所以,采用核范數(shù)最小化的理論將原始的組合優(yōu)化問題轉(zhuǎn)化為用這種凸松弛的優(yōu)化問題,能夠以非常高的概率來(lái)精確地填充出矩陣b的所有元素。 然后,結(jié)合奇異值分解的算法和矩陣填充的貪婪追蹤算法[17]介紹低秩矩陣填充的具體方法。首先,將矩陣X通過奇異值分解[18]分為如式(4)所示的3個(gè)矩陣: X=UΣVT. (4) 其中,U是一個(gè)m×m的正交矩陣,Σ=diag(σ1,…,σr)是一個(gè)m×n的半正定對(duì)角矩陣,VT是矩陣V的共軛轉(zhuǎn)置矩陣,是n×n階的正交矩陣。令L=UΣ1/2,R=VΣ1/2,則式(4)可以分解為X=UΣVT=LRT,代入式(1)得: min rank(LRT), s.t.A(LRT)=b. (5) 設(shè)r0為矩陣X秩的預(yù)估計(jì)值,矩陣L的階為m×r0,矩陣R的階為n×r0。考慮的矩陣L和R的具有多解性,采用Frobenius范數(shù)[19]最小化來(lái)優(yōu)化控制,即: s.t.A(LRT)=b. (6) 另外,由于RSS采樣數(shù)據(jù)中可能含有誤差以及定位區(qū)域中的矩陣可能不完全符合低秩性,將最小化模型約束條件變換成為非約束模型: (7) 然后,需要通過交替迭代過程推導(dǎo)出矩陣L和R:首先,通過虛擬AP技術(shù)的傳播模型法列方程,利用最小二乘法計(jì)算出矩陣X的初始值X0,進(jìn)而推算出其秩的預(yù)估值r0和矩陣X的可能分解矩陣,隨機(jī)選取矩陣X的一組分解矩陣作為矩陣L和R的初始值;其次,固定矩陣L,利用最小二乘法優(yōu)化矩陣R;然后,更新并固定矩陣R,同樣利用最小二乘法優(yōu)化矩陣L;多次重復(fù)以上交替迭代過程,直至按式(7)計(jì)算的目標(biāo)函數(shù)收斂,并達(dá)到設(shè)定的函數(shù)誤差閾值:最后迭代的結(jié)果與倒數(shù)第二次迭代的結(jié)果之差除以最后迭代的結(jié)果的數(shù)值的絕對(duì)值小于等于0.000 1。 在RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P椭貥?gòu)的過程中,用到RSS的歐氏空間信號(hào)特征點(diǎn)和幾何空間特征點(diǎn)兩種特性的點(diǎn)。RSS的歐氏空間信號(hào)特征點(diǎn)需要根據(jù)室內(nèi)空間的具體情況確定,RSS的幾何空間特征點(diǎn)需要在少量RSS數(shù)據(jù)采集的基礎(chǔ)上,利用低秩矩陣填充理論計(jì)算出其所有的幾何空間特征點(diǎn)。 幾何空間特征點(diǎn)填充后,采樣點(diǎn)的原始數(shù)據(jù)和重構(gòu)數(shù)據(jù)會(huì)產(chǎn)生一定的誤差,計(jì)算出該誤差。數(shù)據(jù)選擇時(shí),已經(jīng)有數(shù)據(jù)采樣的幾何空間特征點(diǎn)的數(shù)據(jù)采用原始采樣數(shù)據(jù),新填充的數(shù)據(jù)則根據(jù)所計(jì)算出的誤差賦予相應(yīng)的權(quán)值。然后,利用RSS的歐氏空間信號(hào)特征點(diǎn)、由采樣數(shù)據(jù)的幾何空間特征點(diǎn)和加權(quán)的新填充的幾何空間特征點(diǎn)進(jìn)行RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P偷闹貥?gòu)。模型重構(gòu)的具體流程如圖2所示。 圖2 RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P椭貥?gòu)算法流程 圖3 實(shí)驗(yàn)點(diǎn)位分布示意圖 為了考察基于信號(hào)的歐氏空間信號(hào)特征點(diǎn)和幾何空間特征點(diǎn)的RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P偷亩ㄎ恍Ч谖錆h大學(xué)測(cè)繪學(xué)院101機(jī)房進(jìn)行了模型定位實(shí)驗(yàn),如圖3所示。圖3中,機(jī)房101有6個(gè)AP,定位區(qū)域?yàn)?.9 m×5.2 m,相鄰兩個(gè)采樣點(diǎn)間的距離為0.65 m(即最小格網(wǎng)為0.65 m×0.65 m的方形區(qū)域),○代表數(shù)據(jù)采樣的網(wǎng)格點(diǎn),共有63個(gè)采樣網(wǎng)格點(diǎn)。實(shí)驗(yàn)時(shí),采用1S的采樣率,每個(gè)時(shí)段采集數(shù)據(jù)3 min。由于不同手機(jī)接收AP信號(hào)強(qiáng)度具有差異性,故實(shí)驗(yàn)中所有數(shù)據(jù)的采集均采用同一個(gè)手機(jī)進(jìn)行。 實(shí)驗(yàn)中,采用1.3 m×1.3 m的格網(wǎng)點(diǎn)作為位置指紋定位法的指紋參考點(diǎn),用于構(gòu)建指紋定位離線階段的指紋數(shù)據(jù)庫(kù);根據(jù)信號(hào)重構(gòu)的奈奎斯特采樣定理,采用0.65 m×0.65 m的格網(wǎng)點(diǎn)作為信號(hào)模型重構(gòu)的參考真實(shí)值。 根據(jù)信號(hào)重構(gòu)的奈奎斯特采樣定理,將0.65 m×0.65 m格網(wǎng)點(diǎn)作為信號(hào)模型重構(gòu)的參考真實(shí)值,以AP1為例,其形成的原始信號(hào)強(qiáng)度分布圖顯示在圖4(a)中。 圖4 信號(hào)強(qiáng)度分布圖 從圖4中可以看出,每個(gè)AP的RSS分布圖中都存在信號(hào)強(qiáng)度突變點(diǎn),也就是說(shuō),試驗(yàn)采樣數(shù)據(jù)中可能含有粗差。因此,首先需要結(jié)合實(shí)驗(yàn)具體情況剔除這些粗差采樣點(diǎn),主要指非邊界處的信號(hào)強(qiáng)度突變點(diǎn),而邊界處的信號(hào)強(qiáng)度突變點(diǎn)則更可能是由Wi-Fi信號(hào)的多徑傳播造成的。具體粗差采樣點(diǎn)的剔除情況見表1。剔除粗差采樣點(diǎn)后,以AP1為例,RSS信號(hào)分布圖如圖4(b)所示。 表1 不同AP的粗差剔除數(shù)目及其數(shù)據(jù)刪除率 從圖4(b)中可以看出,剔除極少數(shù)的粗差采樣點(diǎn)后,RSS信號(hào)分布圖的質(zhì)量得到優(yōu)化;然后,從圖4(b)中選取RSS的歐氏空間信號(hào)特征點(diǎn),根據(jù)每個(gè)AP信號(hào)分布圖各自的特點(diǎn),選取的歐氏空間信號(hào)特征點(diǎn)的個(gè)數(shù)不同,具體數(shù)目情況和占總點(diǎn)數(shù)的百分比見表2;最后,用選取的特征點(diǎn)來(lái)重新構(gòu)造信號(hào)模型,重構(gòu)結(jié)果如圖4(c)所示。 從圖4c中可以看出,只需利用總數(shù)據(jù)25%左右的RSS歐氏空間信號(hào)特征點(diǎn)的數(shù)據(jù),就可以基本勾勒出RSS的信號(hào)分布圖。但是,由于只選取了RSS歐氏空間信號(hào)特征點(diǎn)的部分?jǐn)?shù)據(jù),沒有加入RSS的幾何控制點(diǎn)(即RSS幾何空間信號(hào)特征點(diǎn))的數(shù)據(jù),所以勾勒出RSS的信號(hào)分布圖并不能與參考真實(shí)值的RSS信號(hào)分布圖完全吻合。 表2 不同AP選取的歐氏空間信號(hào)特征點(diǎn)數(shù)目及其比例 在室內(nèi)位置指紋定位離線構(gòu)建指紋數(shù)據(jù)庫(kù)階段,采用1.3 m×1.3 m的格網(wǎng)點(diǎn),其指紋參考點(diǎn)的信號(hào)強(qiáng)度分布圖如圖5(a)所示。從圖5(a)與圖4(b)的對(duì)比中,可以看出:由1.3 m×1.3 m格網(wǎng)采樣數(shù)據(jù)所形成信號(hào)強(qiáng)度分布圖與0.65 m×0.65 m格網(wǎng)形成信號(hào)強(qiáng)度分布圖的輪廓大致相同;但是1.3 m×1.3 m格網(wǎng)勾勒出RSS信號(hào)分布圖的很多細(xì)部RSS重構(gòu)值并不理想,與0.65 m×0.65 m格網(wǎng)的采樣值相差較大。所以,僅僅采用RSS的信號(hào)幾何空間特征點(diǎn)進(jìn)行RSS信號(hào)強(qiáng)度分布圖重構(gòu)的效果是不太理想的。 從1.3 m×1.3 m格網(wǎng)點(diǎn)的信號(hào)強(qiáng)度分布圖中,隨機(jī)均勻選取RSS的幾何空間特征點(diǎn)(10個(gè)),保證每行每列都有采樣數(shù)據(jù)。首先,利用這些選取的數(shù)據(jù)直接生成信號(hào)強(qiáng)度分布模型,如圖5(b)所示。然后,利用低秩矩陣填充理論和虛擬AP技術(shù)重新構(gòu)造信號(hào)強(qiáng)度分布模型,RSS信號(hào)強(qiáng)度分布圖重構(gòu)結(jié)果如圖5(c)所示。 圖5 信號(hào)強(qiáng)度分布圖對(duì)比 從圖5(c)與圖5(a)、圖5(b)的比較中可以看出:圖5(c)與圖5(a)的相似度大于圖5(b)與圖5(a)的相似度,所以利用低秩矩陣填充理論生成的RSS信號(hào)強(qiáng)度分布模型比利用原始選取的RSS幾何空間特征點(diǎn)生成的信號(hào)強(qiáng)度分布模型的精度高。另外,圖5(c)中某些AP的RSS信號(hào)分布圖中有個(gè)別的突變點(diǎn),說(shuō)明利用低秩矩陣填充理論生成的RSS數(shù)據(jù)對(duì)選取的RSS幾何空間特征點(diǎn)數(shù)據(jù)有一定的依賴性。所以,在進(jìn)行RSS幾何空間特征點(diǎn)的數(shù)據(jù)選取時(shí),既要保證RSS的突變點(diǎn)的剔除,又要保證選取數(shù)據(jù)的隨機(jī)性。 為了便于分析比較,首先將RSS幾何空間特征點(diǎn)和RSS歐氏空間信號(hào)特征點(diǎn)的詳細(xì)采樣情況列在表3中。然后,利用這些特征點(diǎn)生成原始RSS所有特征點(diǎn)生成的信號(hào)強(qiáng)度分布模型,如圖6(a)所示。最后,再將加權(quán)后的RSS幾何填充數(shù)據(jù)、RSS幾何空間特征點(diǎn)和RSS歐氏空間信號(hào)特征點(diǎn)結(jié)合,生成RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P椭貥?gòu)的信號(hào)強(qiáng)度分布模型,如圖6(b)所示。 表3 不同AP特征點(diǎn)數(shù)目及其比例 圖6 原始RSS所有特征點(diǎn)和RSS室內(nèi)定位重構(gòu)信號(hào)強(qiáng)度分布 從圖4(b)、圖5(a)、圖6(a)和圖6(b)的相互比較中,可以看出:圖6(b)與圖5(c)的相似度高于圖6(a)與圖4(b)的相似度,明顯高于圖5(a)與圖4(b)的相似度。所以,利用低秩矩陣填充理論和虛擬AP技術(shù)生成的RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P椭貥?gòu)的信號(hào)強(qiáng)度分布模型的定位精度較高。 最后,計(jì)算RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P偷亩ㄎ徽`差。本次實(shí)驗(yàn)中,經(jīng)典指紋定位算法與RSS經(jīng)驗(yàn)?zāi)P偷臄?shù)據(jù)采樣量如表4所示。每個(gè)AP有63(7×9)個(gè)數(shù)據(jù),除去少數(shù)突變點(diǎn),基本保證每個(gè)AP都有60個(gè)左右的數(shù)據(jù)量,共有360個(gè)左右。定位精度分析時(shí),用重構(gòu)的RSS與實(shí)際采樣的RSS來(lái)根據(jù)傳播模型計(jì)算他們之間的距離差值,從而計(jì)算出該經(jīng)驗(yàn)?zāi)P偷亩ㄎ徽`差,具體誤差分析如表5所示。 從表4和表5中可以看出,在數(shù)據(jù)采樣量略高于位置指紋(約為1.37倍)的情況下,利用RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P偷亩ㄎ痪蕊@著高于位置指紋的定位精度(約為2倍),特別是0.5 m以內(nèi)的定位精度。所以,在考慮RSS歐氏空間信號(hào)特征點(diǎn)的基礎(chǔ)上,利用低秩矩陣填充理論重構(gòu)出RSS室內(nèi)定位信號(hào)的經(jīng)驗(yàn)?zāi)P途哂幸欢ǖ膽?yīng)用前景。 表4 指紋定位算法與RSS經(jīng)驗(yàn)?zāi)P偷臄?shù)據(jù)采樣量 表5 RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P偷亩ㄎ徽`差分析 % 本文在詳細(xì)介紹低秩矩陣填充理論的基礎(chǔ)上,提出了RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P偷闹貥?gòu)算法。借鑒地形圖中地類特征點(diǎn)和地類特征線概念,提出RSS歐氏空間信號(hào)特征點(diǎn)、特征線的概念,并在RSS幾何空間特征點(diǎn)構(gòu)建指紋庫(kù)的精度分析和RSS歐氏空間信號(hào)特征點(diǎn)信號(hào)模型重構(gòu)的精度分析基礎(chǔ)上,對(duì)不同類型的特征點(diǎn)賦予不同的權(quán)值,用于RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P偷闹貥?gòu)。并通過與經(jīng)典指紋位置定位算法的實(shí)驗(yàn)對(duì)比分析中,說(shuō)明了RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P偷木群涂尚行浴?/p>


2 RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P偷闹貥?gòu)
3 實(shí)驗(yàn)及結(jié)果分析
3.1 實(shí)驗(yàn)方案
3.2 歐氏空間信號(hào)特征點(diǎn)信號(hào)的模型重構(gòu)


3.3 幾何空間特征點(diǎn)構(gòu)建指紋數(shù)據(jù)庫(kù)
3.4 RSS室內(nèi)定位信號(hào)經(jīng)驗(yàn)?zāi)P椭貥?gòu)結(jié)果的分析與比較



4 結(jié) 語(yǔ)
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38鴨綠江(2021年35期)2021-04-19 12:24:18中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28當(dāng)代陜西(2019年10期)2019-06-03 10:12:04電子制作(2018年11期)2018-08-04 03:25:42數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54光學(xué)精密工程(2016年6期)2016-11-07 09:07:19