一種結合空間鄰域關系特征的面向對象遙感影像變化檢測方法
2019-01-05 01:19:40呂文清
測繪工程 2019年1期
關鍵詞:特征
劉 波,燕 琴,馬 磊,呂文清
(1.蘭州交通大學 測繪與地理信息學院,甘肅 蘭州 730070; 2.中國測繪科學研究院,北京 100830; 3.甘肅省地理國情監測工程實驗室,甘肅 蘭州 730070)
遙感影像變化檢測技術已經成為遙感技術最新研究的熱點。該技術從不同時期的遙感數據中定量地分析和確定地表變化的特征與過程[1]。一般包括:不同時間段影像配準、輻射校正等預處理;差異影像構建;變化區域判斷等[2]。
以往的遙感影像變化檢測多采用目視解譯以及分類后比較法[3]。分類后比較法能夠直接獲取變化地物類型,但其工作量巨大,對分類結果精度要求嚴格。為此,一些學者提出了直接變化監測算法,該類算法效率高,隨著技術進步,其檢測精度也逐漸提升[4-7]。近年來,隨著衛星傳感器空間分辨率的不斷提高,面向對象技術的遙感影像信息變化檢測技術也逐漸成熟。相對于傳統遙感影像變化檢測方法,面向對象變化檢測能夠較好地避免“椒鹽現象”的產生,提升變化檢測精度[2,8]。
傳統的面向對象變化檢測算法極少考慮對象鄰域之間的相關性。隨著對象發生變化,與其相鄰對象的空間關系特征也將發生變化。隨著基于多尺度面向對象分割變化檢測算法的提出,對象與對象之間的空間關系特征逐步得到體現[9]。但已有的算法中對象之間的空間關系特征更多地只在同一時期中各自體現[9-11]。本文在影像多尺度分割的基礎上,提出一種基于對象與其相鄰對象之間空間關系的量化方法。本方法將單個對象從圖像分離出來,然后計算它與多個時相影像上的相鄰對象的空間關系特征,最后將該特征提取出來,結合對象光譜特征,通過變化矢量分析(CVA)方法,提取兩個時期遙感影像變化信息。
1 結合空間鄰域特征的變化檢測
1.1 變化檢測流程
本文的實驗流程如圖1所示。
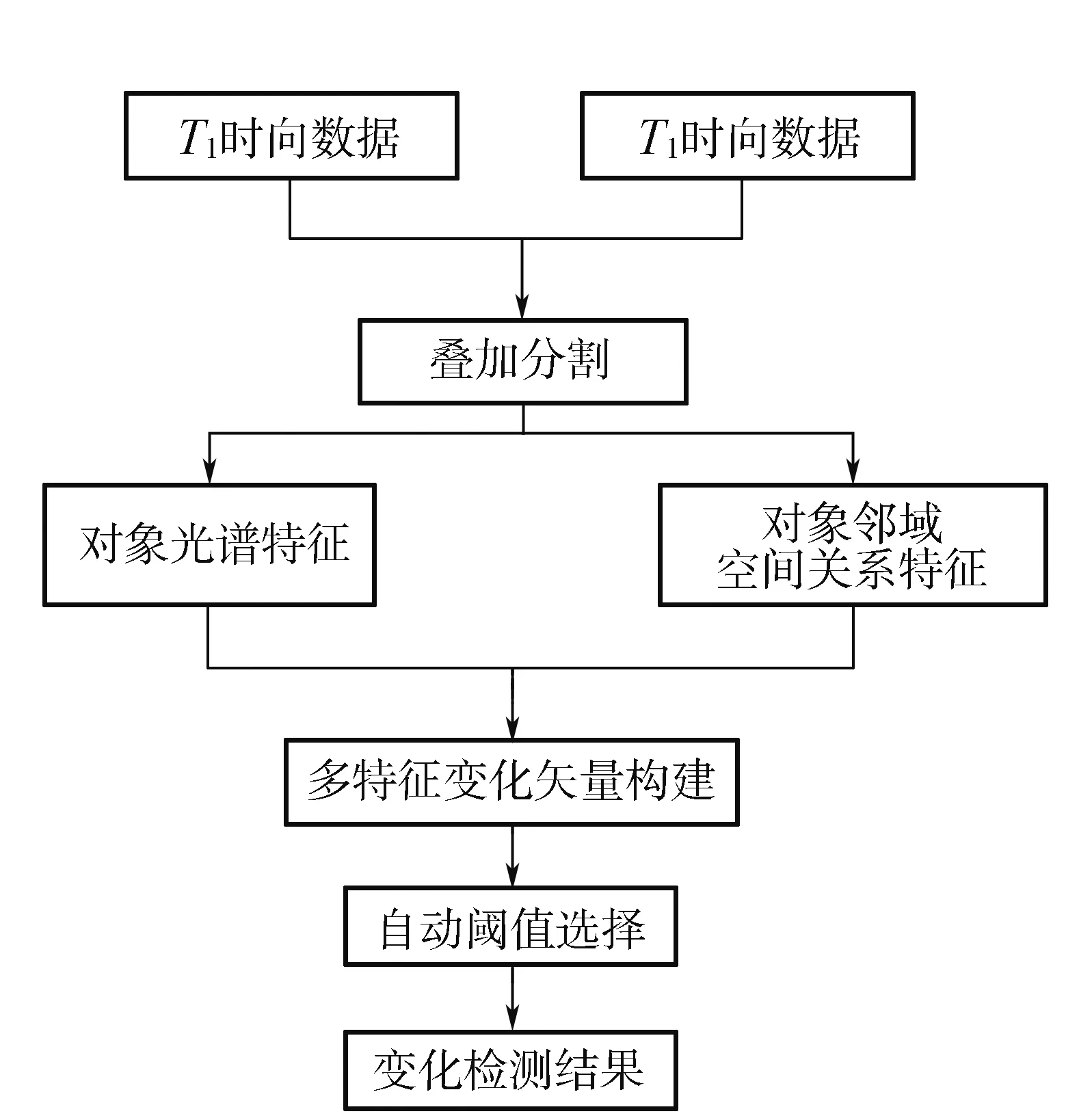
圖1 結合鄰域特征的變化檢測流程
1.2 變化矢量分析(CVA)
變化矢量分析是一種特征向量空間變化檢測算法[12]。其基本原理為多光譜圖像的像素光譜信息或分割后影像圖斑的多種特征可以用一個灰度矢量來表示,對于不同時間的遙感影像,每個像元或每個圖斑的光譜或特征信息都可以生成一個具有一定方向和強度的矢量。假設T1時刻的灰度矢量為X,T2時刻的灰度矢量為Y,變化矢量為ΔC。X與Y分別為:
其中,n為波段數或特征層數,變化矢量定義為:
(1)
變化強度信息為:
|ΔC|=
(2)
其中,|ΔC|包含了從基準時期到檢測時期各個波段變化信息總和,表示了兩期影像的灰度差異。在一般情況下,當|ΔC|較大時,表示兩幅影像之間的差異較大,變化的可能性也越大,反之則較小。因此可以通過選取合理的閾值來提取變化信息。變化矢量分析可以看作是差分法的深化和拓展,在理論上可以處理多光譜數據,而且能夠提供變化類型[13]。
1.3 基于對象的變化矢量分析
基于對象變化檢測的前提是影像分割,目前較為成熟并應用廣泛的分割算法有分形網絡進化算法(FNEA)、基于邊緣檢測算子的分割算法、基于概率密度函數梯度計算的均值漂移(Mean-Shift)算法、基于形態學以及基于分水嶺變換的圖像分割算法等[14]。本次研究主要采用FNEA的多尺度分割算法。
面向對象的遙感影像變化檢測過程中,對于圖像分割可以采取不同的模式。不同分割模式對變化檢測結果有明顯的影響,其中主要分割策略包括3種,多時相組合分割、單時相分割與多時相分別分割[15]。文獻[16]指出多時相組合分割策略相對其他兩種分割策略效果較好,所以本次研究主要在組合分割基礎上進行。圖2所示即為組合分割策略示意圖。
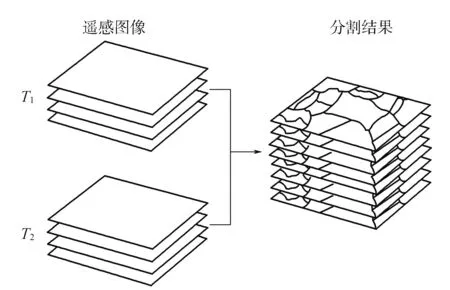
圖2 多時相組合分割示意
基于對象的變化檢測首先為影像分割,分割后得到像斑(影像對象)。實驗通過對兩個時相原始影像疊加分割,獲取影像對象,同時搜索各個對象的相鄰對象并標記,如圖3所示。實驗將具有公共邊或者公共角點的對象看作相鄰對象。
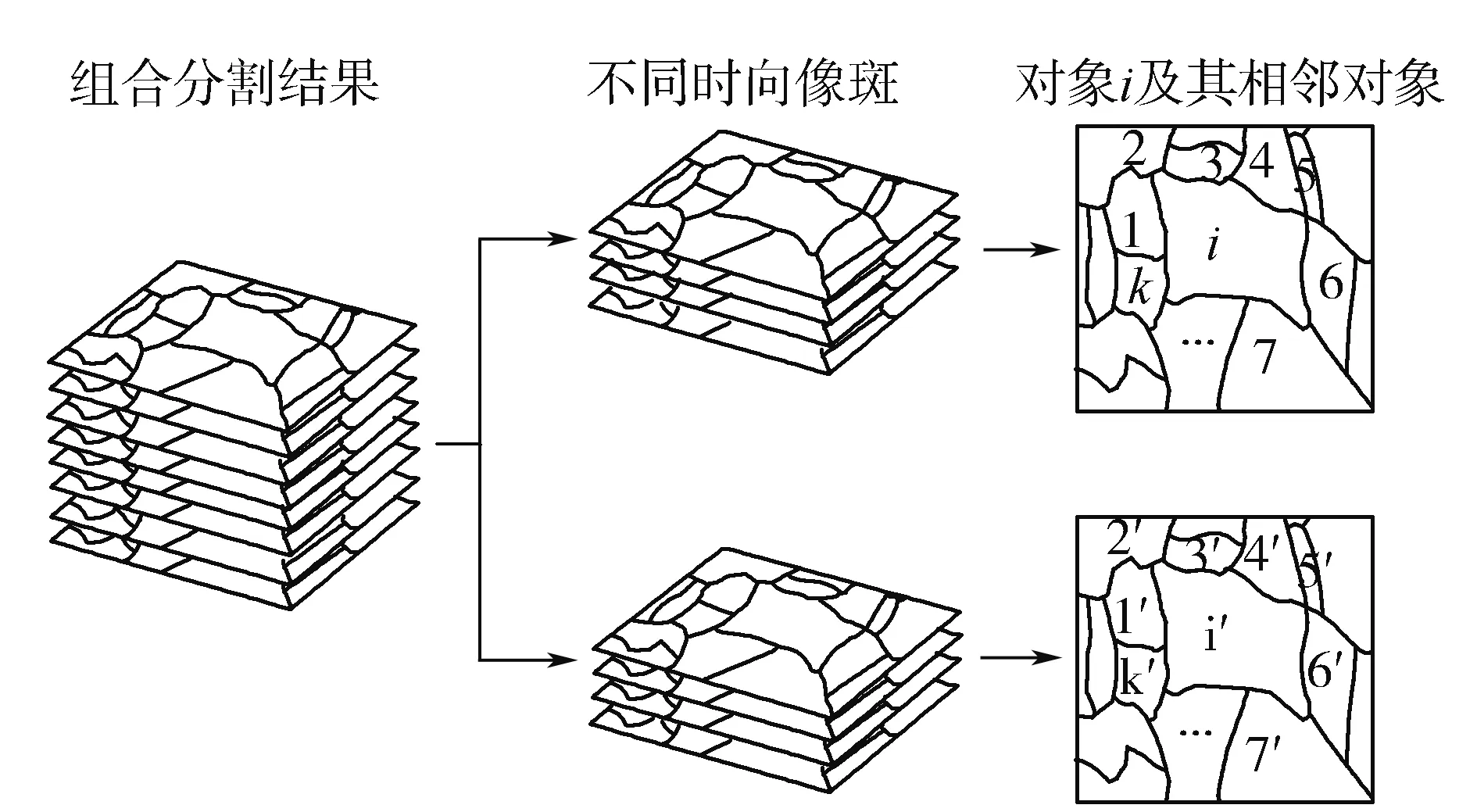
圖3 影像對象及其相鄰對象
1.4 對象空間鄰域特征計算
疊加分割后,產生的影像對象具有多種特征,包括影像光譜特征,紋理特征,空間結構特征等。對于對象之間的關系特征,T1時相與T2時相影像對象與其周圍相鄰對象的光譜差異特征(R),具體可表示如下:
(3)
其中i為影像第i個對象(對于T2時向,i表示為i′)。n為與第i個對象相鄰的對象個數,k為與第i個對象相鄰對象編號,rik為第i個對象與相鄰對象之間關系參數。
本文依據如果對象發生變化,其與周邊對象關系也將發生變化的思想而提出,針對T1時刻影像,rik為T1時刻對象與T1時刻相鄰對象的關系參數;針對T2時刻,rik為T2時刻對象與T2或者T1時刻相鄰對象的特征關系參數,如圖4所示。當使用T1時刻對象時本文假設對象的鄰域未改變,如圖4(a)所示。
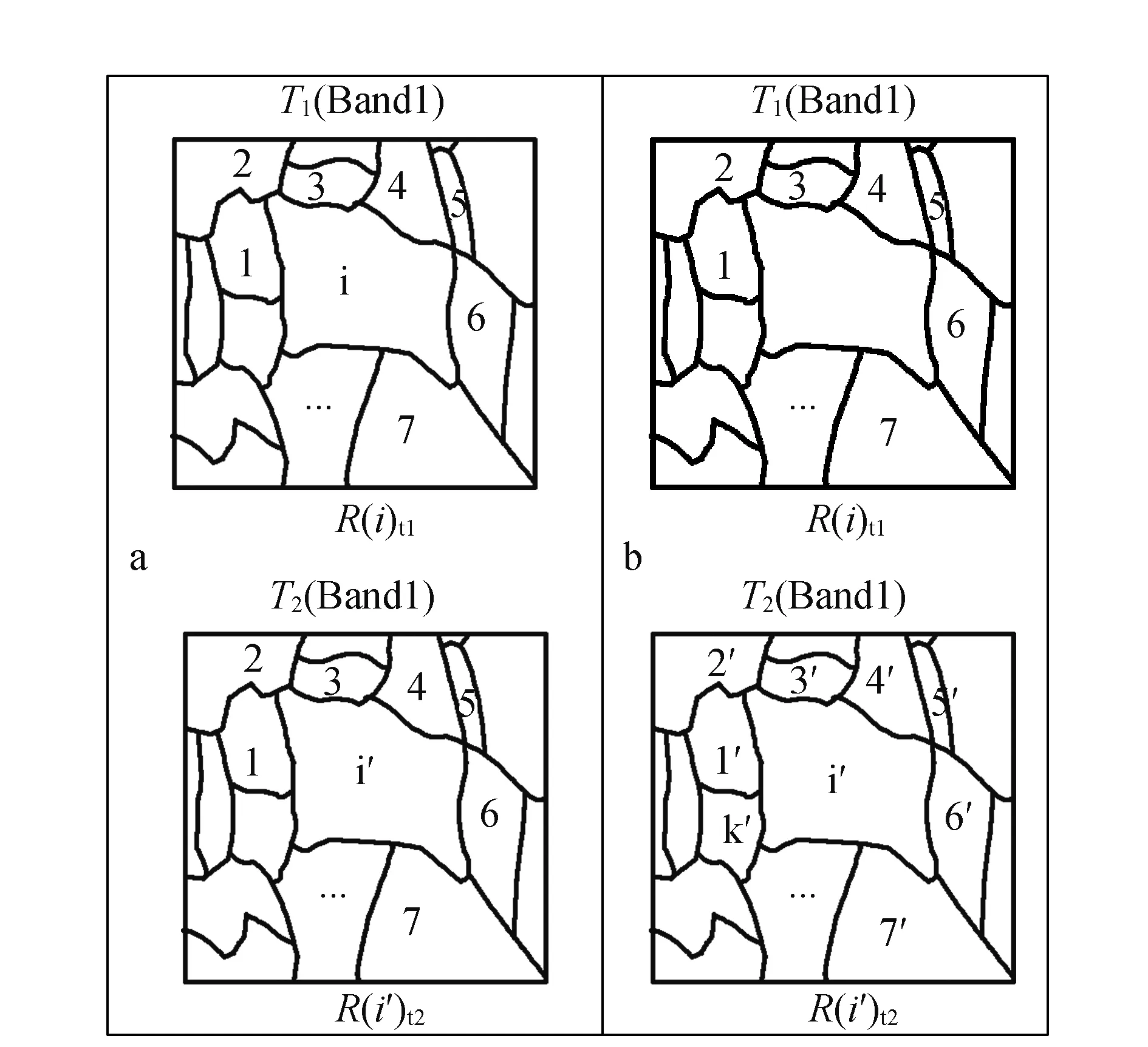
a.T2時相的目標對象相鄰對象為T1時刻的對象;b.T2時相的目標對象相鄰對象為T2時刻對象圖4 T2時向目標對象兩種相鄰關系特征量化圖示
為簡化操作,本實驗將R簡化為各鄰域對象平均像元亮度值之和與鄰域個數的商與目標對象平均像元亮度值的差值,具體算式如下:
(4)
其中t為時相,Mean(i)t為對象I在t時相上的像素平均亮度值,Mean(k)t為目標對象相鄰對象中的第k個對象在t時相與目標的空間關系特征。n為鄰域像斑個數。
故本文在實驗中將目標對象各個波段內像素亮度均值與目標對象和其相鄰對象的關系特征(R)分別歸一化后作為兩個特征共同構建變化矢量。各次實驗以及其特征選擇方案詳細信息見表1,本文后面各種實驗方案將采用對象特征簡寫形式。

表1 特征選擇以及特征量算
2 實驗
2.1 圖像預處理
本次研究選取2002年與2004年兩個時期Quikbird遙感影像數據進行試驗,如圖5所示。首先分別對兩個時期全色和多光譜影像進行融合,然后對兩景輻射定標后影像進行幾何配準,配準誤差在一個像元以內,最后對幾何配準后的兩個時期影像進行相對輻射定標。
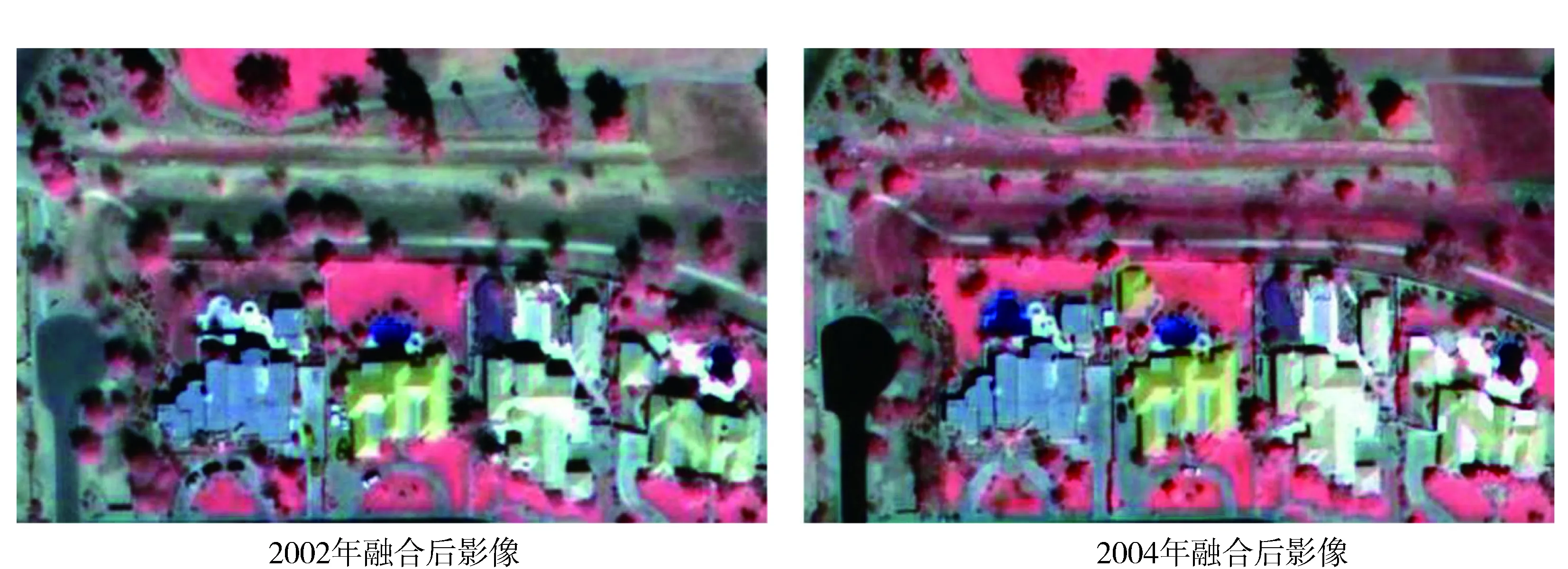
圖5 研究區影像假彩色合成影像
實驗融合方法采用NNDiffusPanSharpening算法,融合結果對于光譜、色彩和紋理信息均能得到很好地保留[17]。在ECognition軟件平臺下,對疊加的兩時相影像進行多尺度分割。關于最優分割尺度的問題始終存在著不同的意見,遙感影像最優分割尺度也是一個廣泛討論的問題[14]。最終確定分割尺度為60,緊致度因子為 0.1,形狀因子為 0.5。
2.2 變化檢測結果與分析
本文所有策略方法都是通過構建變化矢量ΔC,通過計算ΔC的模,設置模的閾值,求取變化信息。本文實驗僅僅利用目標對象的光譜特征參數以及對象與相鄰對象之間光譜參數差異特征,針對特征差異影像,合理進行閾值選擇。本文通過使用EM(最大期望)算法自動獲取分割閾值,將變化矢量圖像像素值歸一化到0到255之間,最終得到基于光譜均值特征(Mean)的方法閾值為50.86,基于Mean+Rt1(t2)方法的閾值為68.5,基于Mean+Rt1(t1)的閾值為66.05。最終變化檢測結果如圖6所示。
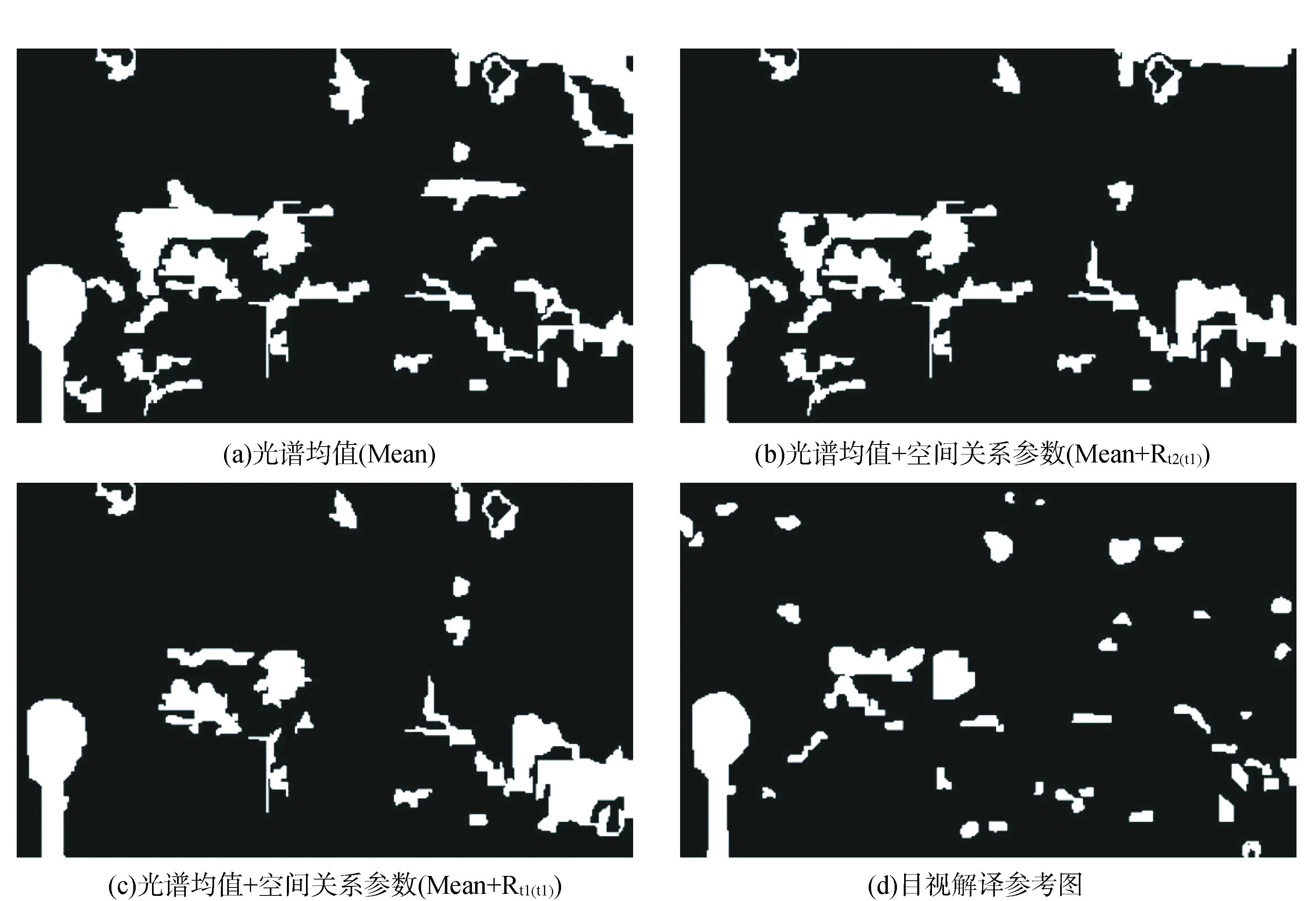
圖6 變化檢測結果圖(圖中白色區域為變化區域)
利用目視解譯結果對各方法結果進行精度評價和對比,具體評價結果如表2所示。可以發現采用空間鄰域關系特征的評價結果總精度比未采用該特征的方法精度高,同時其虛檢率也相對較低。其中采用“光譜均值+空間關系參數(Mean+Rt1(t1))”特征的方法總精度最高,虛檢率最低。同時3種方法漏檢率都較低且相差不大。
3 結 論
通過增加影像對象的鄰域特征來增加基于對象的變化檢測特征參數,發現添加空間鄰域特征的檢測方法比不添加空間鄰域特征的檢測算法結果好。通過兩種不同的空間鄰域特征添加方式,發現T1、T2時相影像對象都采用基于T1時相的鄰域對象能夠取得更高精度,即“光譜均值+空間關系參數(Mean+Rt1(t1))”方法精度更高,總精度達到了90.31%。
此外實驗中還發現,基于空間鄰域特征的參數構造與在變化矢量檢測中的使用策略方法還可以進一步挖掘,比如如何構造影像對象在兩個時期內的全局空間關系特征等。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38