分布式精密編隊衛星相對位姿測量技術綜述
2019-01-07 07:39:36郭崇濱夏喜旺斯朝銘劉沛龍
航天控制 2018年6期
關鍵詞:測量
郭崇濱 夏喜旺 斯朝銘 劉沛龍 杜 陽
1.上海微小衛星工程中心,上海 201203 2.中國科學院微小衛星創新研究院,上海 201203 3.中國科學院大學,北京 100049
空間任務需求的牽引使航天器對有效載荷的應用要求不斷提高。然而其包絡尺寸、口徑、焦距等參數還是受到較大的約束。在此背景下小衛星分布式編隊技術應運而生。根據編隊衛星之間在動力學方面關系的緊密程度,分布式編隊飛行可劃分為精密編隊、知識編隊和協作編隊[3]。
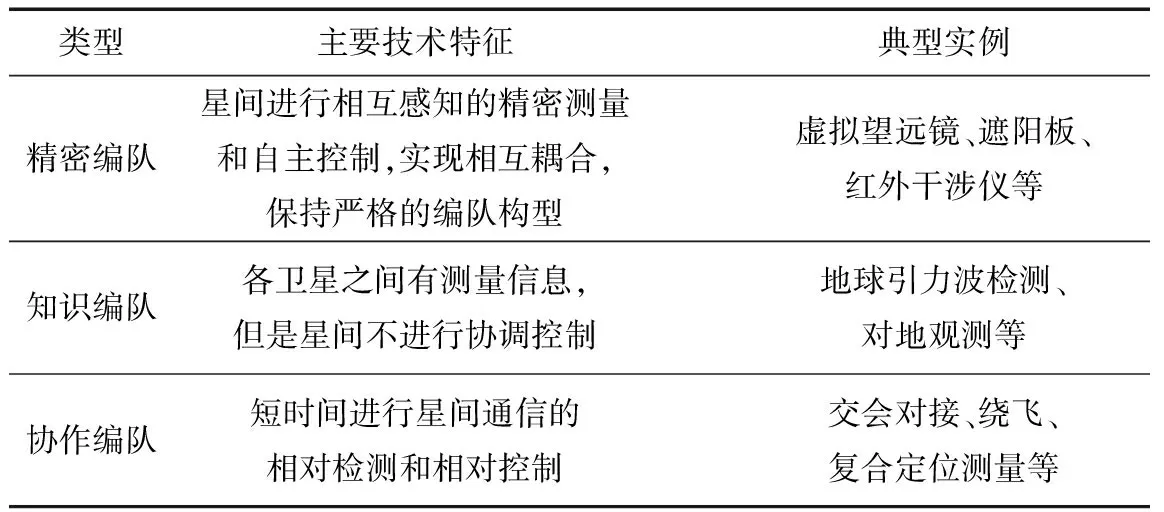
表1 編隊飛行分類
精密編隊在實現性能突破的同時,也要求編隊衛星自身和星間有較高的位置、姿態精度[4]。因此,實現星間自主的高精度相對測量和控制成為分布式衛星精密編隊技術領域的研究熱點。本文對分布式精密編隊衛星研究現狀進行了綜述,對編隊衛星之間相對測量方法進行了分析和總結,并討論了星間相對測量技術的發展前景。
1 分布式精密編隊衛星研究現狀
1.1 國外分布式精密編隊衛星研究現狀
1.1.1 PRISMA
瑞典于2010年發射的PRISMA是歐洲較早的精密編隊項目,包括Mango(95 kg)和Tango(50 kg)兩顆微小衛星,在約725 km的太陽同步軌道上同軌串行飛行,用于驗證至m級距離內dm級控制精度的自主編隊、停靠、交會和逼近等技術[5]。雙星分別搭載了CNES研發的用于衛星編隊的射頻測量系統(Formation Flying Radio Frequency, FFRF),并采用相對GPS系統作為星間備份測量系統[6]。
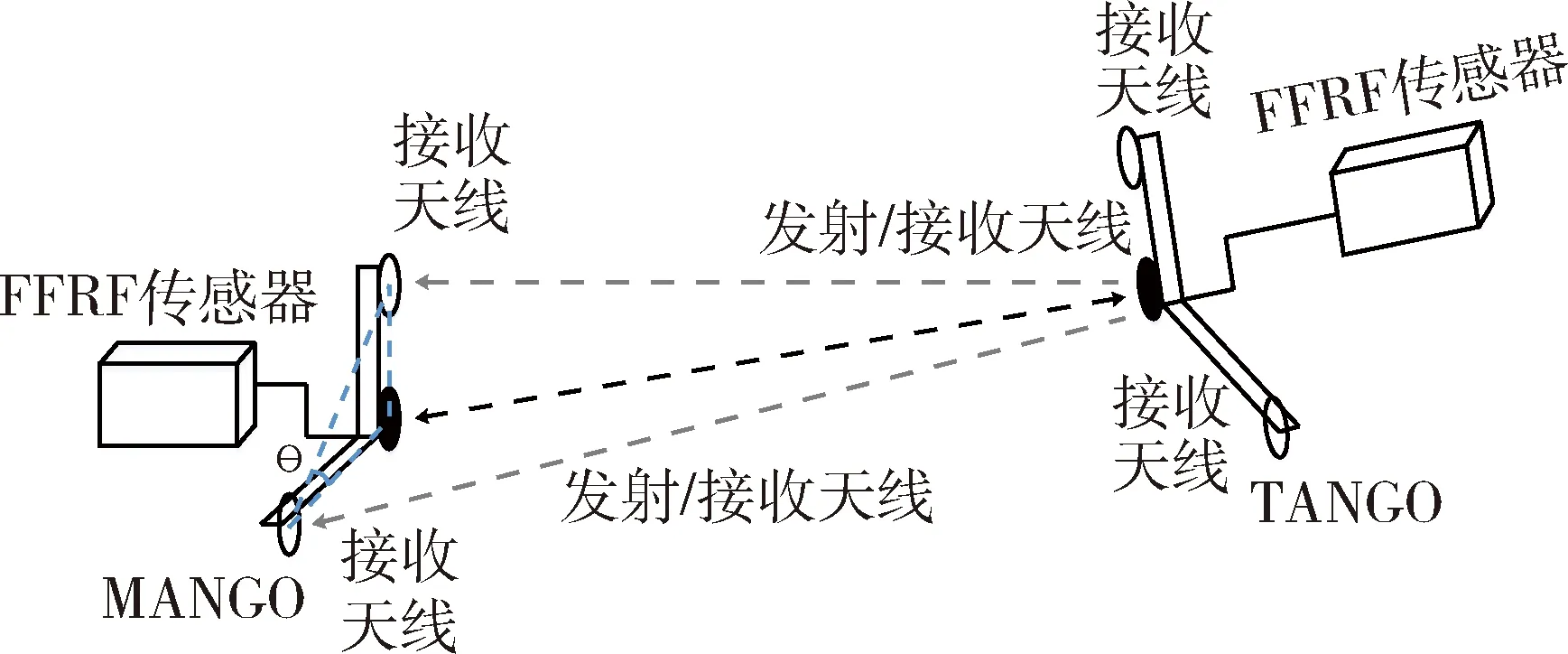
圖1 FFRF相對位置和姿態測量原理
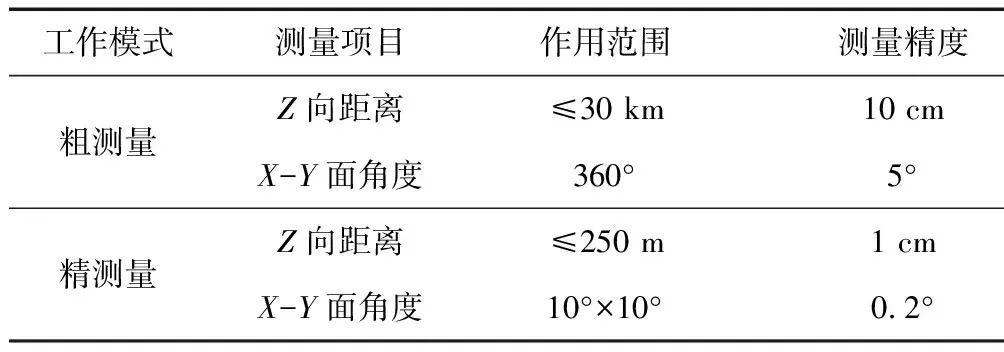
表2 PRISMA中FFRF測量系統性能指標
1.1.2 XEUS衛星
歐空局2008年提出的X射線反演宇宙空間光譜項目(X-ray Evolving Universe Spectroscopy, XEUS)計劃由2顆間距約40 m、分別安裝光學組件和探測器的衛星精密編隊構成的一個長焦距X射線虛擬望遠鏡。XEUS引入了激光測量方法,將星間測量的精度從cm級提高到了亞μm級,拓展了編隊衛星的應用范圍[7]。如圖2所示,主衛星上每個激光探頭通過指向控制依次測的距離得到2顆衛星之間的相對位置和姿態信息,性能指標如表3所示。
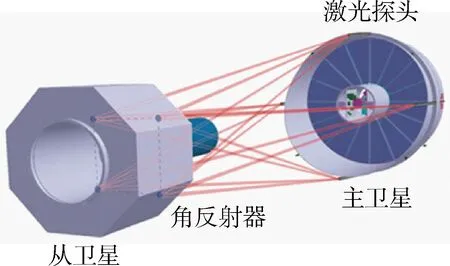
圖2 XEUS測量原理圖
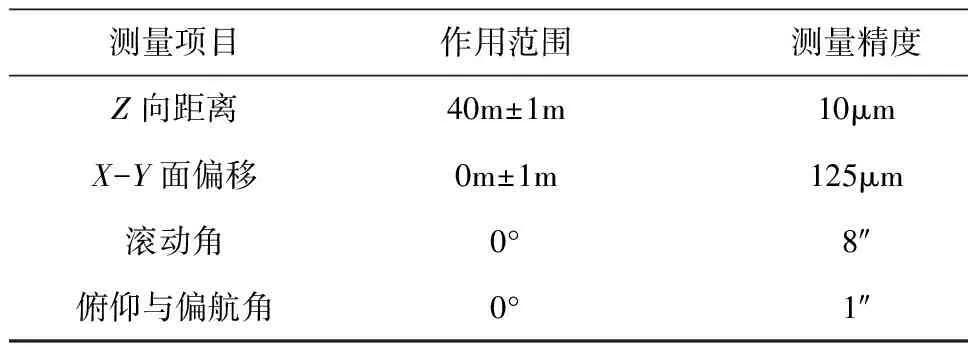
表3 XEUS相對測量系統性能指標
1.1.3 GRACE & GRACE-FO衛星
NASA在2002年發射的重力恢復與氣候試驗項目(Gravity Recovery and Climate Experiment, GRACE)500km、星間距約100~150km的衛星。通過星上的雙向K波段星間測距系統(K-band Ranging System, KBR)對星間距離進行精確測量。其距離與速率測量精度分別達到1μm和1μm/s[8]。
GRACE的成功促使NASA和德國地球科學研究中心在2018年5月又聯合發射了GRACE-Follow On衛星來延續之前的任務。除KBR星間測距系統外,新一代GRACE-FO衛星搭載了激光測距儀,提高了各項測量精度[9]。
1.1.4 Proba-3衛星
歐空局計劃于2020年發射的Proba-3任務包括1顆約340kg的追蹤星(矮星)和1顆約200kg的目標星(日冕儀)。如圖3所示,試驗計劃在遠地點兩星相距約100~150m時進行精密編隊,目標星遮擋太陽營造出人造日食的景象,追蹤星收集相關數據。
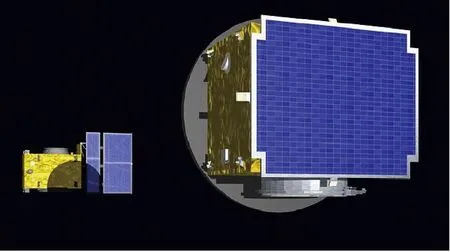
圖3 Proba-3雙星工作示意圖
為了實現亞mm級星間控制,Proba-3采用的星間測量鏈路包括GPS縱向相對位置測量、星間相對切向粗測量(Coarse Lateral Sensor,CLS)以及星間相對切向與縱向精測量(Fine Lateral and Longitudinal Sensor,FLLS)3個環節[10]。
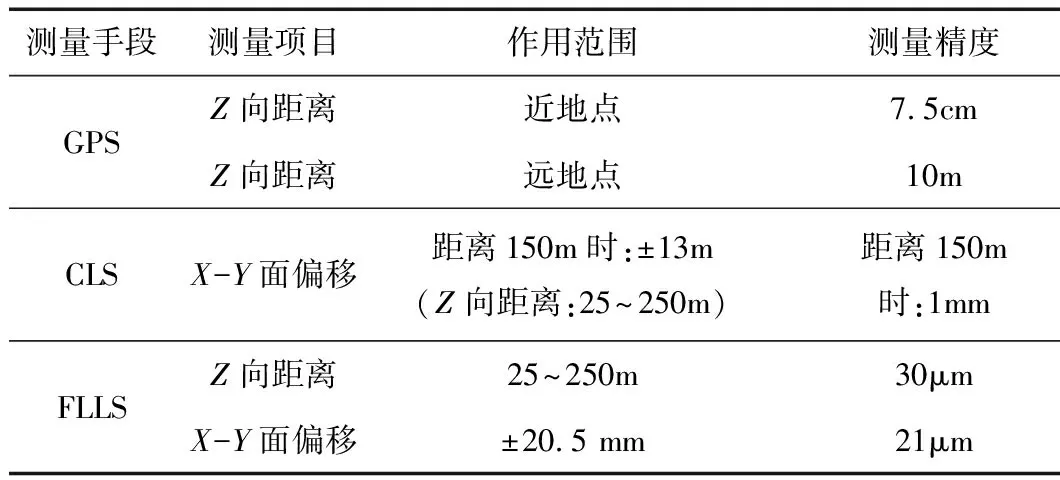
表4 Proba-3相對測量系統性能指標
1.1.5 Terra SAR-X / Tan DEM-X衛星
德國航空航天中心分別于2007年和2010年發射的Terra SAR-X與Tan DEM-X兩顆相類似的約1350kg衛星,在約514km的圓軌道上,通過雙星精密編隊進行合成孔徑雷達SAR成像,用于地面數字高程的高精度測量和ATI測速。
該項目僅使用了GPS偽距和雙頻載波相位觀測方程構成的聯合觀測模型,并引入高精度動力學模型(100階地球重力場模型)實現高精度的星間相對位置估計。其自主控制精度達到了10m(1σ)[11]。
1.1.6 Gemini衛星
德國空間操作處理中心等單位發起的Gemini任務由2顆質量80~100kg、軌道高度500~700km的衛星組成,主要用于在軌演示驗證基于激光測量的星間跟蹤技術和閉環編隊控制策略以及自主軌道控制技術。
Gemini用于相對測量的設備主要包括激光干涉計、脈沖激光雷達以及GPS接收機。如表5所示,衛星根據不同的作用距離和控制要求選擇編隊結構和測量方式[12]。
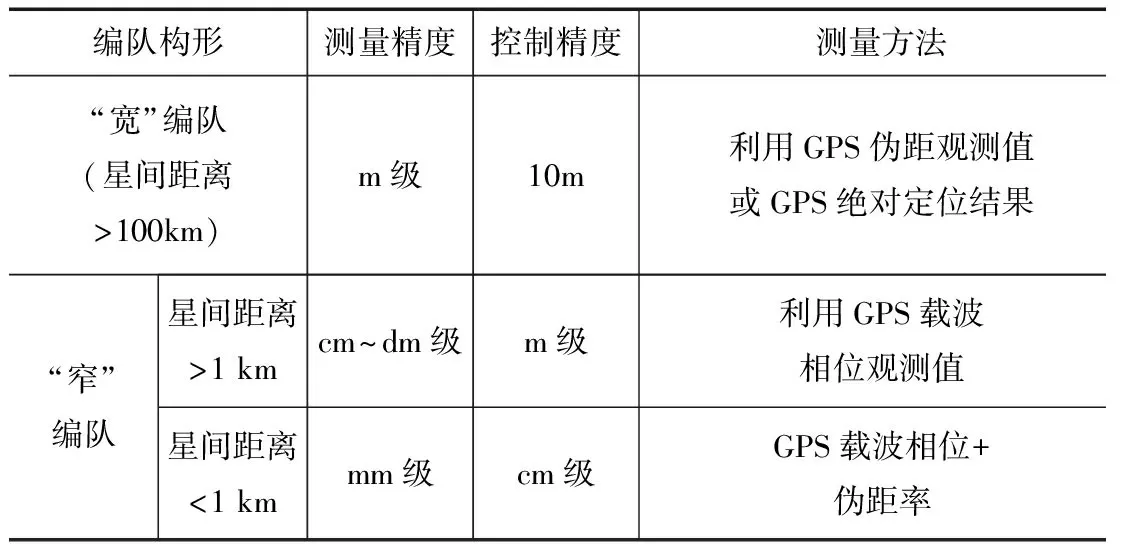
表5 Gemini任務測量精度
1.1.7 CANYVAL-X項目
CANYVAL-X是由NASA、韓國延世大學及韓國航空航天研究所在2016年合作開展的項目。該項目包含2顆綽號分別為Tom和Jerry的立方星來驗證虛擬望遠鏡技術。
該項目主要利用可見光視覺測量技術,如圖4所示。 Jerry安裝了激光二級管,Tom安裝了對準識別激光信標的視覺相機,它利用圖像投影來確定星間相對位置和姿態,能夠實現的姿態測量和控制精度約1°,位置測量精度約dm級,控制精度約m級[13]。
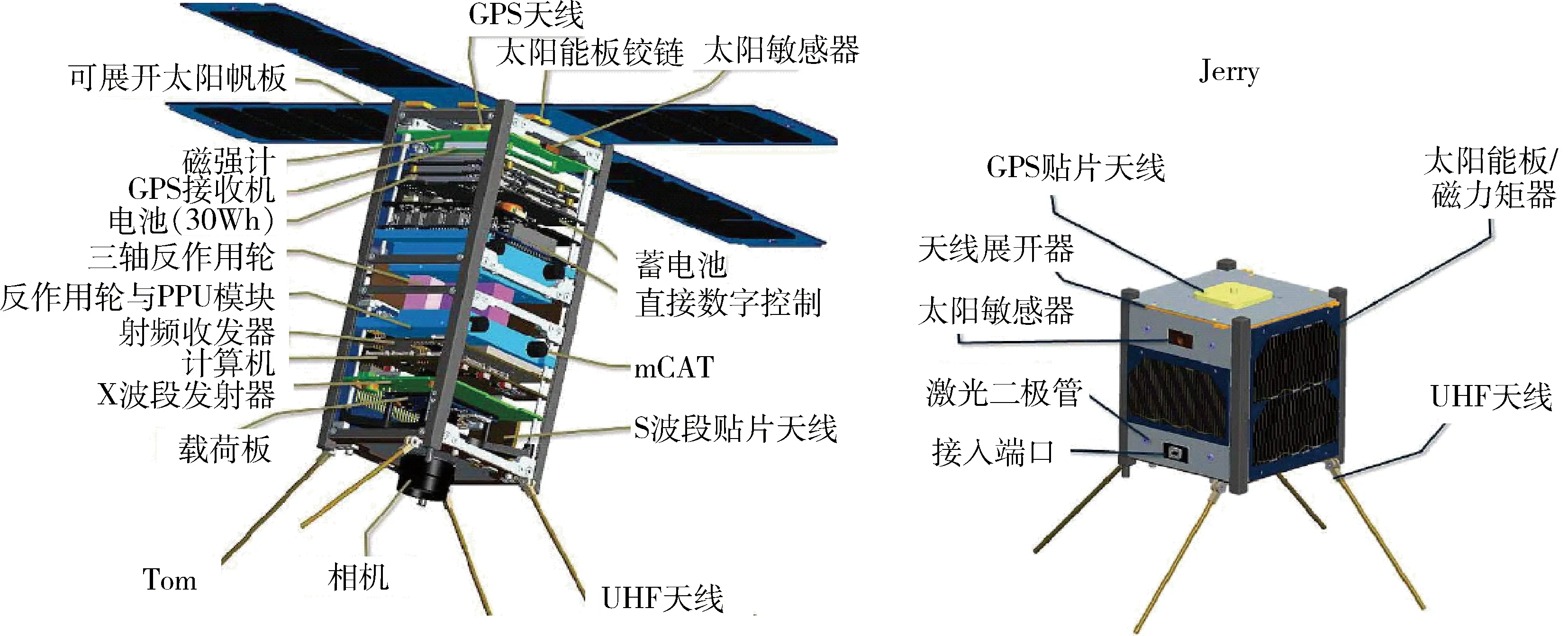
圖4 CANYVAL-X衛星示意圖
1.2 國內分布式精密編隊衛星研究現狀
針對分布式精密編隊衛星技術,國內也進行了深入的理論和工程研究。哈爾濱工業大學改進的傳統應答機、華中科技大學提出的基于載波的高精度自主相對測距技術、南京航天航空大學提出的利用類GPS技術實現編隊衛星間的自主測量等,在測量設備及測量技術方面均取得了一定成果[14]。此外,中國科學院、國防科技大學等研究機構也為編隊衛星相對測量技術提供了研究基礎。但由于我國在相關領域的研究起步較晚,在在軌驗證方面與發達國家發展水平相比,還存在一定的差距。
2 星間相對測量方法特征分析
2.1 GPS相對測量技術
當2顆編隊衛星均安裝GPS接收機時,可通過星間通信鏈共享2顆衛星接收到的GPS信號,從而完成2星相對位置的測量計算。具體算法可分為相對位置差分、相對偽距差分和相對載波相位差分[15]等。
GPS相對位置差分技術是將雙星GPS接收機處理后的定位結果進行差分,得到相對位置關系,適用于星間大于100km的情況,其定位精度能達到10m;GPS相對偽距差分是對雙星偽距測量量進行差分,得到相對偽距。適用于編隊雙星距離小于100km的情況,測量精度可達到1m;GPS相對載波相位差分是對2個衛星GPS接收機得到的GPS載波相位測量量進行差分,適用于編隊衛星小于50 km的情況,精度能夠達到5 cm[16]。
該技術的優點是質量、功耗小,成熟度高,已成功在GRACE、PRISMA等型號中得到驗證。但相對GPS測量技術只能用于低、中軌衛星編隊或轉移軌道的近地點附近。
2.2 射頻測量技術
射頻測量技術的原理與GPS測距原理類似,基本思想是在每個編隊飛行器上安裝接收機,每個接收機上可安裝多個發射天線和接收天線,通過測碼偽距觀測及測相偽距載波觀測得到相對距離。
利用射頻技術實現星間相對測量的主要步驟包括2步:
1)采用偽碼測距和雙向測距。如圖5所示,在A星和B星上分別安裝一副發射/接收天線,通過偽碼和相位測量得到星間的相對距離;
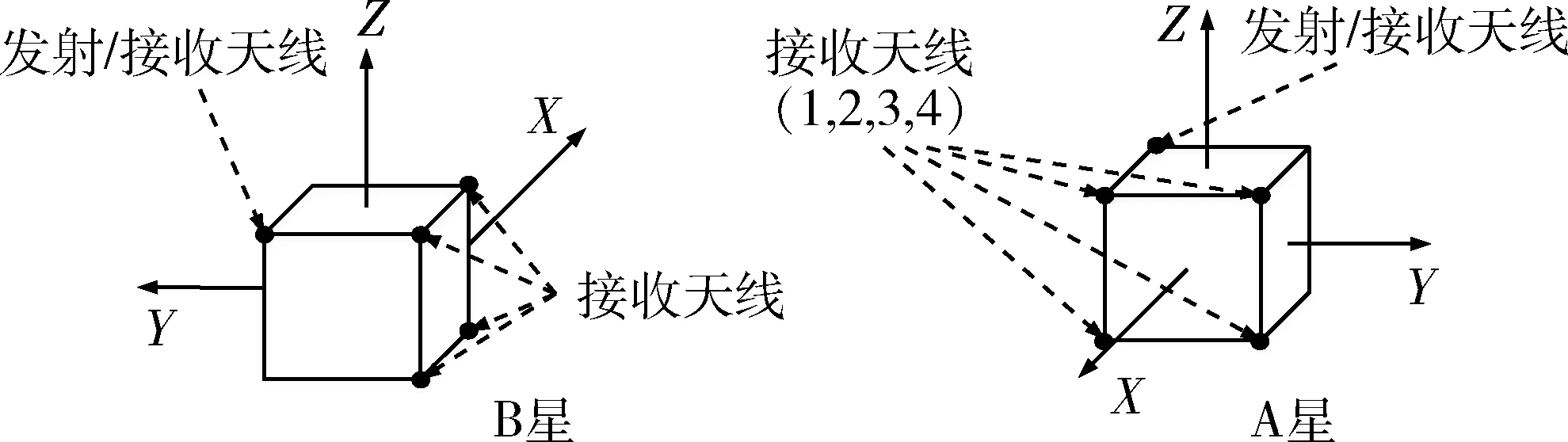
圖5 無線電實現高精度星間基線測量的原理圖
2)采用比相法實現星間方位、俯仰姿態信息測量。A星上安裝的4臺接收機構成測角儀,采用比相法,得到B星與A星間的基線指向。理論分析表明,利用L波段的無線電波方案測距和測角精度可分別達到cm級和0.1°[17]。
射頻測量方法又稱類GPS測量技術,已成功在PRISMA衛星上搭載驗證,技術相對成熟。在精測量模式下,能夠達到cm級的測距精度,同時可為測量范圍較小但精度較高的光學測量傳感器提供初始化條件。射頻測量系統不依賴于外界信號,可以在任意軌道上使用。
2.3 激光測量技術
激光測量按機理可以分為脈沖式和連續波相位式,脈沖式通過測量光脈沖的傳播時延得到星間距離;連續波相位式則是通過觀測連續光波在星間往返傳播過程中的相位變化得到星間距離,在此基礎上通過多個高精度距離向量計算出相對姿態[18]。
典型的激光相對測量系統由激光發射、接收、伺服機構和系統控制處理單元等組成,如圖6所示。該系統采用CCD、帶通濾光片、實時圖像處理單元和伺服執行機構完成目標捕獲。目標捕獲后采用四象限探測器QD對目標進行高精度的瞄準。CCD光學天線輔助無線電探測系統對目標進行捕獲、粗定位,同時配合角度編碼及光電探測單元完成目標的空間角度測量[19]。
該方案可獲得的基線長度和角度(包括方位角和俯仰角)測量精度分別為mm量級和角秒級(優于5”)。
激光測距具有測量精度高、隱秘性好、功率大、抗干擾能力強和單色性好等優勢,已成功運用于XEUS、LISA、Gemini等衛星任務。但是激光測量波束較窄的特點限制了多目標的同時測量功能,且需要其他測量系統進行引導。選用多種測量系統相配合的模式開展星間測量工作成為發揮激光測量最大優勢的熱點方案。
2.4 紅外測量技術
紅外測角技術為被動探測方式,有調制盤編碼、非調制盤編碼、單元掃描和多元并行掃描、線陣推掃和面陣凝視等多種方式。與主動雷達探測系統組合使用,可以較好地利用各自的特點,發揮各自的特長,提高探測概率和跟蹤能力[20]。
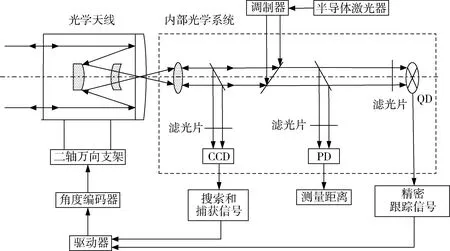
圖6 星載激光雷達系統框圖
典型的紅外測角與主動激光雷達組合的測量系統如圖7所示。該系統主要由中視場紅外熱像儀、長焦距紅外測角儀、激光測距儀和擺鏡跟瞄系統以及信息處理機組成。
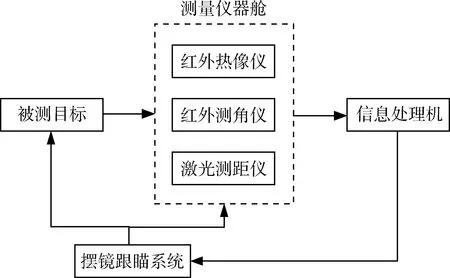
圖7 紅外+激光測量方案原理框圖
該方案實現星間基線測量主要步驟為:1)采用紅外跟蹤系統對目標星進行俘獲跟蹤;2)采用長焦距紅外相機目標方位角和俯仰角;3)采用測相激光測距儀進行精確測距;4)采用集成控制系統對各分系統進行控制,并對數據進行綜合處理,構成星間基線測量系統。此方案的距離測量精度約為厘米級,方位測量精度為角秒量級。
紅外測量系統結構簡單、體積小、重量輕、分辨率高、隱蔽性好且抗干擾能力強,在美國DARPA實驗室的Orbital Express衛星上得以成功運用。但受空間背景輻射和強光影響大,測量精度不穩定,且不能提供距離信息。總的來說,紅外測量與主動探測系統組合使用能更好地發揮技術優勢,提高聯合探測的概率和跟蹤能力。
2.5 可見光視覺測量技術
可見光視覺測量是一種無源探測技術。通常的測量技術手段即在目標衛星選定的4個或4個以上的特征點上安裝光學信標,然后使用部署的光學相機對目標進行成像,將得到的圖像與成像的幾何關系、特征點安裝的先驗信息以及坐標系之間的轉換關系相結合,就可得到衛星的相對位置和相對姿態。
以VISNAV為例介紹可見光測量原理。VISNAV ( Vision-based Navigation ) ,利用一個位置敏感二極管(Position Sensitive Diode,簡稱PSD)得到的電流測量數據計算包括傳感器位置和方位在內共6個自由度的估計值。
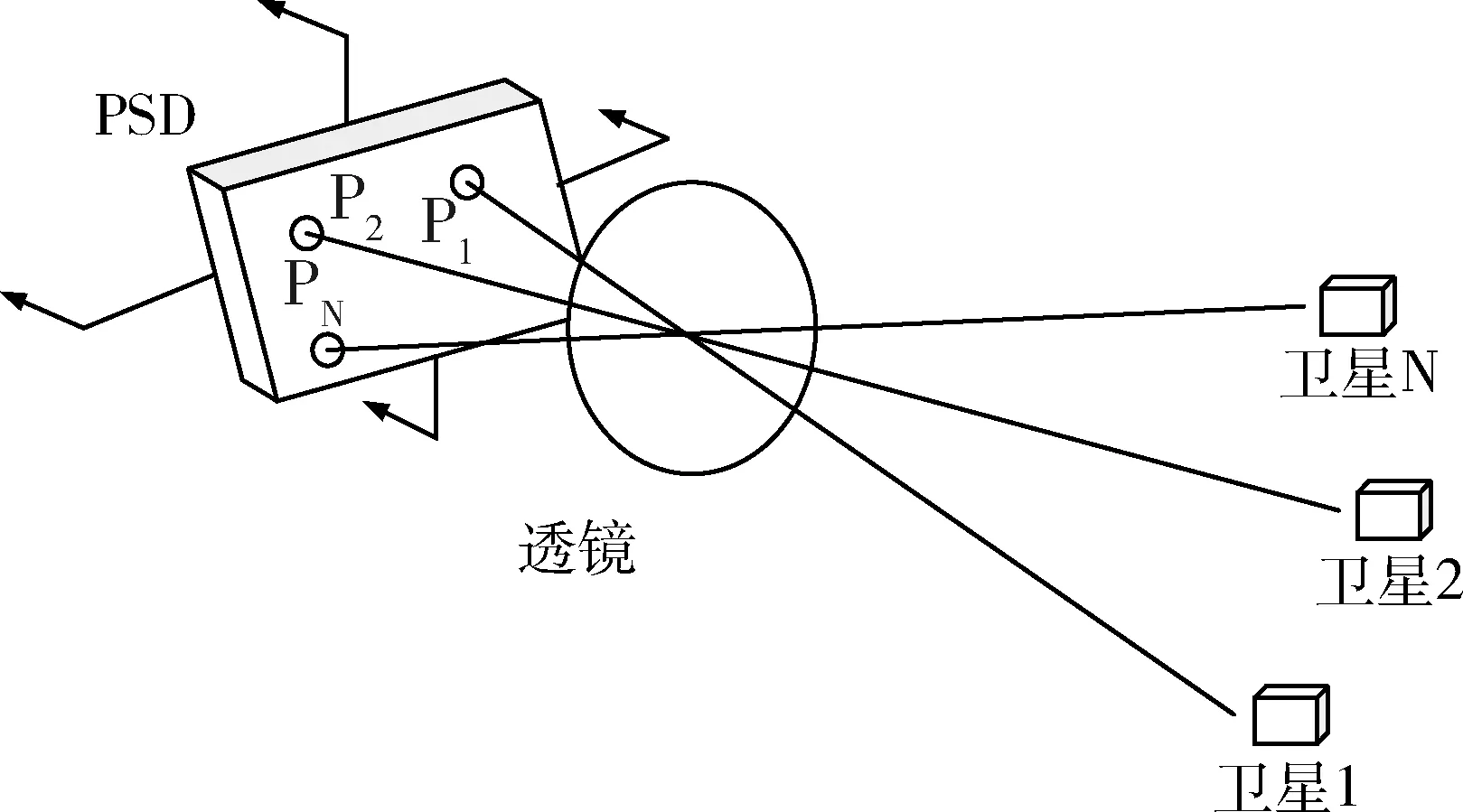
圖8 VISNAV傳感器系統的相對導航原理
如圖8所示,目標衛星上發出的多束光經測量衛星的光學透鏡聚焦到PSD傳感器上,再通過傳感器的光電轉換產生電流,電流的大小與光源與測量衛星之間的距離和方位有關。當星間距離小于10m時,相對定位精度為2mm,相對定姿精度為0.01°[21]。
可見光視覺測量方法具有敏感度高、光譜響應寬,線性度好和可靠性高的優點,在CANYVAL-X項目和上文提到的VISNAV傳感器中,已靈活應用在衛星對接和衛星編隊飛行的相對導航系統中。另一方面,該測量技術也有僅適用于近距離測量、測量精度穩定性低和受光照影響大的缺點。所以需要結合對空間合作目標與非合作不同的觀測特點,合理規劃視覺傳感器。
3 總結
目前適用于衛星精密編隊星間測量的方法主要包括GPS相對測量、射頻測量、激光測量、紅外測量和可見光視覺測量等。其中,GPS測量方法依賴于GPS信號,故只能在近地軌道使用,其它測量方法則不依賴外界信號,可應用于任意軌道。各測量技術的工作距離及測量精度如表6所示。
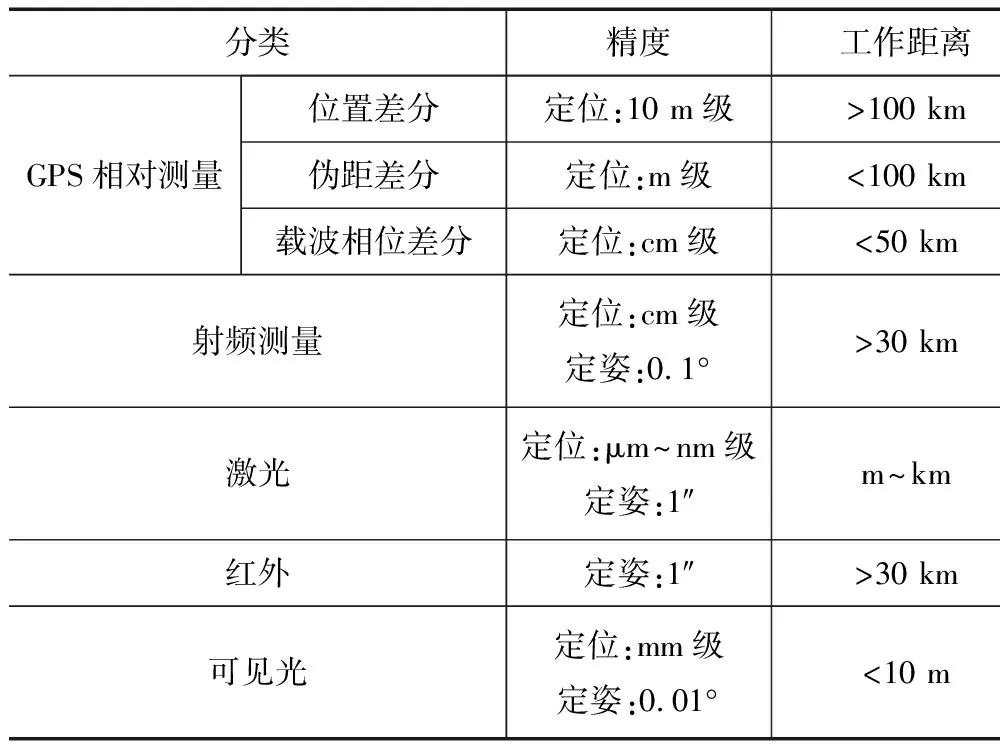
表6 星間相對測量技術總結
GPS測量方法技術成熟,可同時提供航天器位置、速度等信息,測量設備體積小重量輕。射頻測量技術與GPS測量技術相像,作用距離遠,測量覆蓋率高,實時性強,可用于多航天器相對測量,但測量精度不足。激光測量技術測量精度高,保密性好,抗干擾能力強,但其波束窄,需其它測量系統進行引導。紅外測量技術和可見光視覺測量技術分辨率高,卻易受空間輻射及強光等干擾;紅外測量技術隱蔽性好,但僅能提供角度信息;可見光測量技術工作距離小,適用于航天器的交會對接和近距離編隊衛星的相對導航。
總體而論,在分布式衛星精密編隊方面,低軌近距離衛星編隊任務可采用GPS相對測量技術或射頻測量技術,中、高軌近距離衛星編隊任務需采用射頻測量技術;在考慮空間交會任務時,交會末段還需應用可見光視覺測量技術和激光測量技術,紅外測量技術可用作有益補充。
鑒于各測量手段優劣勢明顯,越來越多的實驗開始使用多種手段組合測量的方式發揮最大優勢,“無線電+激光”、“紅外+激光”、“可見光+紅外+激光”等各種組合測量手段也逐漸成為研究熱點[22]。
4 結束語
在未來的精密編隊衛星任務中,盡管針對不同的觀測任務,其探測性能、編隊形式、編隊參數及指標要求均有差別,但相對位置和姿態測量技術具有一定的通用性,在未來相對位姿傳感器的發展也會像現在衛星上GPS、星敏感器、陀螺、磁強計等傳感器的組成一樣,成為一個成熟的單機部件,可根據其具體的測量指標需求配置相對位置和姿態傳感器。各種星間相對位姿測量技術的測量動態范圍與測量精度成反比,即精度越高的測量技術其測量動態范圍越低。衛星在編隊建立過程中,可以結合GPS、射頻、激光、紅外以及可見光的方法分階段進行相對位置實時測量與控制,使測量與控制精度從km級到cm級再到μm級遞進,同時多個編隊測量系統協同合作也提高了編隊控制系統的魯棒性[23]。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00