基于HHT的電動泵便攜式故障檢測裝置
2019-01-17 08:16:32劉笑凡王天舒謝旭陽
船電技術 2018年12期
劉笑凡,余 刃,王 石,王天舒,謝旭陽
基于HHT的電動泵便攜式故障檢測裝置
劉笑凡,余 刃,王 石,王天舒,謝旭陽
(海軍工程大學核科學與技術學院,武漢 430033)
為了有效地檢測電動泵運行異常狀況,本文在振動信號時域、頻域分析的基礎上,引入時頻分析方法Hilbert-Huang變換(Hilbert-Huang Transform, HHT),適當選取對各種故障模式敏感的特征參數,構成特征參數集。通過對電動泵振動信號各特征參數在不同故障模式下的表現進行分析,實現對電動泵運行狀態和故障模式的判斷。采用某數據中心網站的電動泵軸承故障數據作為樣本數據驗證了方法的有效性。結果表明,通過引入HHT后的特征參數集,可以更有效地對數據中的四種運行狀態進行判斷。基于所提出的特征參數集和分析方法,開發了電動泵便攜式故障檢測裝置。
振動信號 時頻分析 HHT 故障診斷 電動泵
0 引言
電動泵作為船舶動力裝置的重要輔助機械,對其安全運行起著重要作用。在船舶動力裝置中,由于運行環境和安裝空間的限制,對一些電動泵的監測手段有限,難以及時檢測和發現其異常運行狀態,從而錯過最佳處理時間。
電動泵運轉時會產生振動,當出現異常的時候,其振動信號必然也會出現異常,因而通過監測電動泵運行的振動信號判斷電動泵運行是否出現異常,是一種較為常用的監測手段[1]。電動泵振動信號的特征提取和故障識別是故障診斷中的兩個重要部分。由于其振動信號具有非線性和非平穩性的特點,傳統的以傅里葉變換為基礎的方法難以取得較好的分析效果[2]。鑒于傳統方法的局限性,以及船舶動力裝置的特殊性,本文提出基于HHT的核動力裝置電動泵故障診斷方法。希爾伯特-黃變換(Hilbert-Huang Transform, HHT),是由Norden E. Huang(黃鍔)等人與1998年提出的,并引入了Hilbert譜的概念和Hilbert譜分析的方法,在非線性、非平穩信號的故障診斷中得到了廣泛引用[3,4]。
在進行電動泵運行狀態判斷時,需要適當選取若干能夠表征電動泵運行狀態的特征參數,構成電動泵狀態檢測和故障診斷的特征參數集。選取的特征參數集應對各種故障運行狀態具有足夠的敏感性,并應保證通過分析其中各特征參數在不同運行狀態(含正常和故障狀態)下的表現,能夠有效區分各種運行狀態,從而達到異常運行狀態監測和故障診斷的目的。本文針對船舶動力裝置電動泵缺乏方便有效的故障檢測手段問題,研究了電動泵振動信號的HHT分析方法,提出了綜合時域、頻域和時頻域分析的特征參數集,并利用美國凱斯西儲大學軸承數據中心網站的電動泵軸承故障數據作為樣本數據,進行運行狀態分析和故障判定的實驗驗證。開發了便攜式電動泵故障檢測裝置,實現對船舶動力裝置中電動泵運行狀態的監測。
1 基于HHT的振動信號處理方法
不論是在完全時域或是完全頻域上處理非平穩信號,都會造成信號局部信息的缺失。而對于電動泵運行狀態監測,獲取其振動信號的局部特性又是非常重要的,因而引入信號的時頻分析方法對振動信號進行處理。HHT就是一種信號的時頻分析方法。
HHT主要由兩部分組成:第一部分為經驗模態分解(Empirical Mode Decomposition, EMD);第二部分為對任意信號經過EMD后得到的各本征模函數(Intrinsic Mode Function, IMF)進行Hilbert變換,從而推導得出Hilbert時頻譜和Hilbert邊際譜。該方法與以傅里葉變換理論為基礎的時頻分析方法有較大不同,能很好地解釋以傅里葉變換為基礎的方法所不能解釋的現象。
1.1 經驗模態分解
EMD方法的基本思想是:利用采集到的時域信號上下包絡線的平均值確定瞬時平衡位置,進而提取本征模函數(IMF)。IMF反映了信號中存在的不同特征的成分,由于電動泵發生局部損傷故障時振動信號表現出高頻調幅信號與低頻諧波相疊加的特征,可以推斷,EMD能夠分離出信號中反映損傷特征的高頻調幅信號,從而為故障診斷提供依據[3]。一個IMF必須滿足兩個條件:
1)函數在整個時間范圍內,局部極值點和過零點的數目相等,或者最多相差一個;
2)任意時刻的局部最大值的包絡線(上包絡線)和局部最小值的包絡線(下包絡線)的平均值必須為0。
EMD方法必須基于以下假設條件:
1)數據至少有2兩個極值,一個極大值和一個極小值;
2)數據的局部時域特性是由極值點間的時間尺度唯一確定。
EMD的具體步驟如下[9]:
1)求出原始數據()的局部極大值和極小值,利用三次樣條插值連接,分別得到極大值包絡線x()和極小值包絡線x();
2)對每個時刻局部極大值x()和極小值x()取平均,得到瞬時平均值();

3)用原始數列()減去瞬時平均值得到一個去掉低頻的新數列(),即

4)檢查()是否滿足IMF的兩個條件,若滿足,則()為一個IMF;若不滿足,將()作為原始數列重復上述3個步驟,直到滿足兩個條件為止,這樣就得到了第一個IMF,記為c()。一般來說,c()代表了原始數列中的高頻部分,也稱c()為原始數列的一個IMF;
5)將原始數列減去c()得到一個去掉高頻組分的差值數列r(),對r()進行上述平穩化處理過程可以得到第2個IMF分量c(),如此重復下去直到最后一個序列r()不可再分解(為單調函數或常數)為止,此時r()代表原始數列的均值或趨勢。
最后,原始的數據序列即由這些IMF分量以及一個趨勢或均值表示:

1.2 對本征模函數做Hilbert變換
將IMF做快速傅里葉變換(FFT)可以得到振動信號的Hilbert譜。
對IMF做Hilbert變換:



式中,

上式中定義的瞬時振幅和瞬時相位反映了信號的瞬時特性。在此基礎上定義的瞬時頻率為:

在概念上,瞬時頻率可以理解為一個標準正弦波在局部最佳逼近被分析信號的頻率值。在統計上它與傅里葉頻率是相容的,傅里葉頻率是全局量,而瞬時頻率是局部表述方式;傅里葉頻率是獨立的,而瞬時頻率是時間的函數。
由以上可以看出,對IMF所做的Hilbert變換得出的振幅和頻率都是時間的函數,那么將每個IMF的解析信號求和,即得到原始信號()的解析信號:

式中a表示瞬時頻率下的振幅,ω表示瞬時頻率。
稱上式為()的Hilbert譜,記為()。將其對時間進行積分得到邊際譜:

將其平方對積分即得到瞬時能量譜,對時間積分即得到能量譜:


2 特征參數集的選取
將振動信號轉換為頻域信號是判斷電動泵運行狀態的一種常用方法,這是因為電動泵高速的周期性轉動。當出現故障時,其振動信號的變化在頻域上的反映尤為明顯。除頻域分析以外,振動信號的時域分析也能夠一定程度地反映電動泵的運行狀態。為了增加判斷的準確性,本文綜合應用了信號的時域、頻域和時頻域的分析結果,構成判斷運行狀態的特征參數。針對時域和頻域信號,主要選取了以下特征參數:
1)振動烈度
振動烈度通常用于表征振動水平,一般使用機械設備測點振動信號的均方根值表示。其計算公式如下:
其中表示所測信號的長度,()表示振動速度。
2)峭度
峭度是無量綱參數,是描述某變量所有取值分布形態陡峭程度的統計量。它與電動泵泵體的參數(如轉速、尺寸、載荷等)無關,但是對沖擊信號非常敏感。因而這種特點特別適用于表面損傷類故障、尤其是早期故障的監測。
峭度的計算方法如下:

在實際應用中,通常將峭度值做減3處理,使得正態分布的峭度為0。
3)頻譜
頻譜是判斷振動信號是否運行穩定的重要參數,一旦電動泵出現非常明顯的振動異常,可以通過頻譜信號直接進行判斷,同時也可通過頻譜信號中出現的倍頻信號對運行狀態進行判斷。頻譜信號是通過對采集到的振動信號做快速傅里葉變換(FFT)得到的,其基本運算方法如下:

上式中,()為時域信號,F()為時域信號經過變換后得到的頻域信號。
4)功率譜



最終,本文選取了振動信號的IMF分量、Hilbert邊際譜和能量譜、振動烈度、峭度、頻譜、功率譜等參數構成電動泵狀態監測的特征參數集。此特征參數集中的各參數在電動泵的不同運行狀態下會有不同的表現形式。將其作為判斷電動泵運行的依據,與已知的正常或故障運行狀態所對應的特征參數集進行對比,即可判斷電動泵當前的運行狀態。
3 特征參數集對不同運行狀態的敏感性分析
3.1 特征參數的計算
為驗證所選取的特征參數集對電動泵各類故障的敏感性,以及用其進行故障判定的有效性,本文采用來自美國凱斯西儲大學軸承數據中心網站的軸承正常和故障數據[10]進行分析。該數據為1.47 kW 電機,轉速在1730-1797 rpm 范圍波動下運行時的振動數據。其中,所選取的驅動端軸承振動數據的采樣頻率是48000 Hz,數據包括正常運行、內圈故障、滾珠故障、外圈故障等四種狀態滾動軸承運行的振動信號,每組信號約記錄有48萬個數據。表1給出了振動信號的時域和頻域特征參數計算結果,表2給出了振動信號的時頻域特征信號計算結果,其中的Hilbert譜和對IMF做Hilbert變換的結果,是對經驗模態分解中得出的能夠有效表征電動泵運行狀態的IMF做譜分析和Hilbert變換得到的。
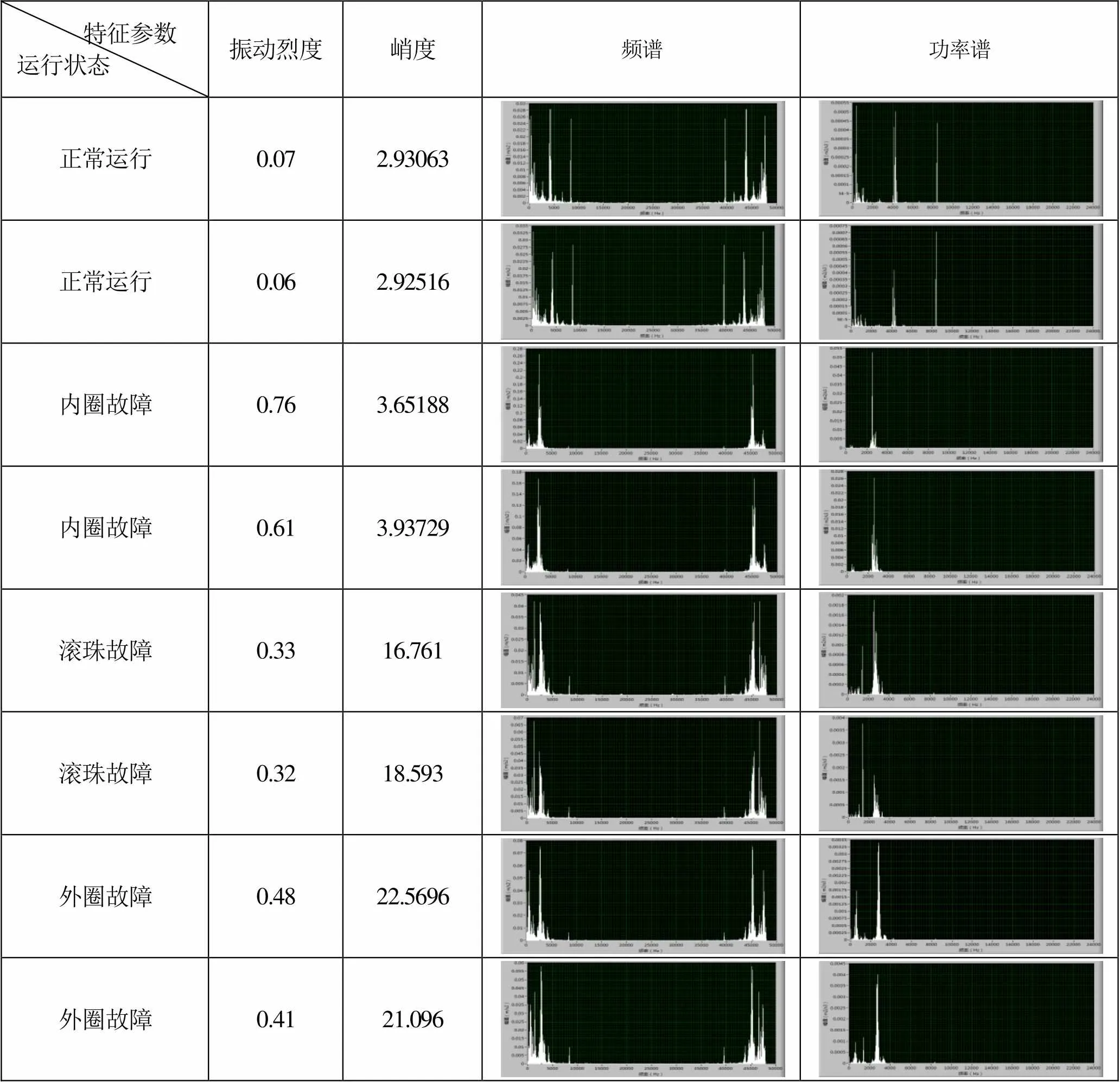
表1 振動信號的時域、頻域分析結果

表2 振動信號的時頻分析結果
3.2 利用特征參數集對電動泵運行狀態的分析
分析表1中的振動信號時域、頻域參數計算結果,可以發現,正常狀態下的振動烈度和功率譜中的最大功率較其他運行狀態要小一個數量級左右。因而,通過振動烈度和功率譜分析可以甄別電動泵的正常運行狀態和故障運行狀態。但是僅僅通過這兩種特征參數不能有效區分三種故障狀態,所以需要綜合分析特征參數集的各特征參數,才能夠判斷電動泵所處的運行狀態。
分析表1中的各運行狀態的峭度值,可以將滾珠故障和外圈故障與其他兩種運行狀態區別開,但即使結合振動烈度、頻譜、功率譜等參數也不能有效區分滾珠故障和外圈故障兩種狀態。分析表2 中IMF做Hilbert變換的結果,可以看出,引入HHT后,變換后的波形可以明顯地區分滾珠故障和外圈故障。而此時通過分析表2 中IMF的Hilbert頻譜,可看出內圈故障狀態下頻域內的最大振幅比正常狀態下的最大振幅高出約一個數量級,因而可以通過IMF的Hilbert頻譜區分正常運行狀態與內圈故障狀態。而經過EMD后得到的IMF作為一種重要的中間量,也可以反映電動泵的運行狀態。通過上述分析可以得出,當時域、頻域分析無法明確區分電動泵的運行狀態時,通過引入HHT可以更加精確地對電動泵的各種運行狀態進行甄別。
綜上,振動烈度、峭度、頻譜、功率譜、經EMD得到的IMF、IMF的Hilbert頻譜以及IMF的Hilbert變換等是對上述四種狀態敏感的特征參數,可以有效地對電動泵不同的運行狀態進行甄別。
4 便攜式故障診斷裝置的設計
在船舶航行中,為實現便捷地對動力系統中主要電動泵的運行狀態進行監測,本文設計開發了便攜式電動泵運行狀態監測裝置。該裝置的硬件結構包括傳感器、數據采集裝置和平板計算機三個部分,其基本結構如圖1所示,設備如圖2所示。在監測過程中,將傳感器用磁鐵吸附在泵體上,采集電動泵的振動信號,故本裝置的應用無需對原設備作任何改動。本裝置采用加速度傳感器拾取振動信號,通過NI-9234振動信號采集模塊采集振動信號數據,并采用NI-9181數據采集卡,通過以太網將振動信號數據傳輸給平板計`算機。采用LABVIEW開發了振動信號的采集與分析軟件,實現對振動信號采集的啟停控制,并對采集到的振動信號進行時域、頻域和時頻特征參數的分析計算,從而得到前文所述的特征參數集,提供給使用人員。使用人員根據計算結果,結合其經驗,實現對電動泵運行狀態的分析判斷。
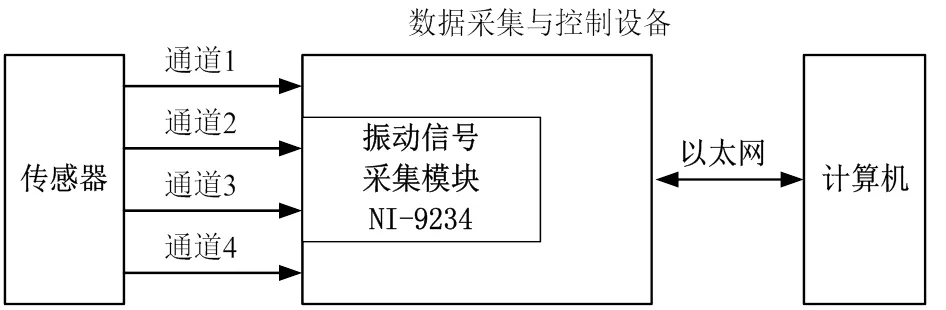
圖1 硬件總體結構圖
5 結論
通過電動泵運行時產生的振動信號來判斷電動泵的運行狀態,是電動泵運行狀態監測的一種常用的手段。在狀態監測中,僅通過振動信號的時域和頻域分析法并不能對所有的運行狀態進行甄別。為此,本文引入了振動信號的時頻分析法HHT,結合時域和頻域分析法,構成了能夠有效判別電動泵各種正常和故障運行狀態的特征參數集。采用來自美國凱斯西儲大學軸承數據中心網站的電動泵軸承故障數據作為樣本數據,對利用所選特征參數集進行各種運行狀態甄別的有效性進行了驗證。在此基礎上設計了便攜式故障診斷裝置的設計,通過振動信號的時域、頻域和時頻分析三種手段,實現了對船舶動力裝置電動泵運行狀態的監測。

圖2 加固型便攜式計算機
[1] 徐卓飛, 劉凱, 張海燕等. 基于經驗模式分解和主元分析的滾動軸承故障診斷方法研究[J]. 振動與沖擊, 2014, 33(23): 133-139.
[2] 許凡, 方彥軍, 張榮. 基于EEMD模糊熵的PCA-GG滾動軸承聚類故障診斷[J]. 計算機集成制造系統, 2016, 22(11): 2631-2642.
[3] 高強, 杜小山, 范虹等. 滾動軸承故障的EMD診斷方法研究[J]. 振動工程學報, 2007, 20(1): 15-18.
[4] 熊衛華, 趙光宙. 基于希爾伯特-黃變換的變壓器鐵心振動特性分析[J]. 電工技術學報, 2006, 21(8):9-13.
[5] 劉世金. Hilbert-Huang變換及其應用研究[J]. 高師理科學刊, 2012, 32(4): 40-42.
[6] 鄒巖崑. 局域波分析的理論方法研究及應用[D]. 大連理工大學, 2004.
[7] 李博. 基于LabVIEW的HHT方法實現及在軸承故障診斷中的應用研究[D]. 太原理工大學, 2008.
[8] 高東璇. 基于BP神經網絡的齒輪故障模式識別研究[D]. 長安大學, 2010.
[9] 陳一賢. HHT方法分析[D]. 浙江大學, 2007.
[10] csegroups.case.edu /bearingdatacenter /pages /48k-drive -end-bearing-fault-data
Portable Fault Detection Device for Electric Pumps Based on HHT
Liu Xiaofan, Yu Ren, Wang Shi, Wang Tianshu, Xie Xuyang
(Collage of Nuclear Energy Science and Engineering, Naval University of Engineering, Wuhan 430033, China)
TP206.3
A
1003-4862(2018)12-0012-06
2018-07-13
劉笑凡(1989-),男,研究生。研究方向:核動力控制與運行。E-mail: 1508969066@qq.com
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
計算物理(2014年2期)2014-03-11 17:01:44
振動、測試與診斷(2014年5期)2014-03-01 01:14:21