表貼式永磁電機(jī)轉(zhuǎn)子偏心故障快速診斷研究
2019-01-17 06:14:56李全峰黃厚佳黃蘇融李琳紅
電機(jī)與控制學(xué)報(bào) 2019年12期
李全峰 黃厚佳 黃蘇融 李琳紅
摘要:針對表貼式永磁同步電動(dòng)機(jī)運(yùn)行時(shí)轉(zhuǎn)子發(fā)生偏心故障問題,提出一種利用振動(dòng)速度頻譜分析來快速診斷的新方法。首先,運(yùn)用解析法推導(dǎo)出轉(zhuǎn)子未偏心時(shí)徑向電磁力波表達(dá)式,在此基礎(chǔ)上通過引入靜偏心修正系數(shù)ε(θ)和動(dòng)偏心修正系數(shù)εd(θ),進(jìn)一步推導(dǎo)出轉(zhuǎn)子靜偏心和動(dòng)偏心時(shí)徑向電磁力波解析表達(dá)式。通過解析分析表明:當(dāng)轉(zhuǎn)子靜偏心時(shí)會(huì)新增階數(shù)為(r±1),頻率為kf1的電磁力波分量;而轉(zhuǎn)子動(dòng)偏心時(shí)會(huì)新增階數(shù)為(r±1),頻率為(k±1/p)f1的電磁力波分量。其次,運(yùn)用有限元法通過兩臺(tái)表貼式永磁電機(jī)實(shí)例驗(yàn)證了解析分析結(jié)果。最后,通過無線振動(dòng)測試實(shí)驗(yàn)來驗(yàn)證運(yùn)用該振動(dòng)速度頻譜分析法快速診斷電機(jī)轉(zhuǎn)子發(fā)生偏心故障的可行性。
關(guān)鍵詞:表貼式永磁同步電動(dòng)機(jī);偏心故障診斷;徑向電磁力波;振動(dòng)速度頻譜;有限元仿真
中圖分類號:TM351
Abstract:A novel method is addressed to fast diagnosethe problem of surface-mounted permanent magnet synchronousmotors(SPMSM) rotor eccentricity fault by using the analysis of the frequency spectrum of vibration velocity. Firstly, the radial electromagnetic force waves(REFW) expression was deduced by the analytical method when the rotor is normal. Based on above results, both static and dynamic eccentricity correction coefficient, ε(θ) and εd(θ), were introduced to deduce the REFW expression when the rotor is static and dynamic eccentricity. It finds out by the analytical results that when the rotor is static eccentricity, and it is newly produced of REFWs component with order of (r±1) and frequency of k f1, while when the rotor is dynamic eccentricity, it is newly produced of REFWs componentwith order of (r±1) and frequency of (k±1/p)f1. Secondly, the finite element method(FEM)was used to verify the correctness of analytical results by the two SPMSM as examples. Finally, the feasibility of using the method of the vibration velocity spectral analysis forfast diagnosing the problem of rotor eccentricity fault was validated by the wireless vibration test.
Key words:surface-mounted permanent magnet synchronousmotors;diagnosis of eccentricity fault; refw; vibration velocity spectrum; finite element stimulation
0 引言
表貼式永磁同步電動(dòng)機(jī)因其具有良好的機(jī)械特性、伺服特性和高效率在工業(yè)界中被廣泛應(yīng)用 [1]。但在電機(jī)制造過程中以及電機(jī)運(yùn)行承受劇烈載荷時(shí),很容易造成電機(jī)定轉(zhuǎn)子軸線不對中而出現(xiàn)轉(zhuǎn)子偏心,從而造成氣隙分布不均勻,使電機(jī)運(yùn)行時(shí)產(chǎn)生較大的電磁振動(dòng),嚴(yán)重影響電機(jī)的性能和使用壽命。因此,針對表貼式永磁電機(jī)轉(zhuǎn)子偏心故障機(jī)理及快速診斷技術(shù)的研究十分必要。
七八十年代早期,國內(nèi)外學(xué)者主要對電機(jī)偏心故障引起氣隙磁導(dǎo)的變化機(jī)理進(jìn)行了深入研究,奠定了理論分析基礎(chǔ)。1974年蘇聯(lián)學(xué)者舒波夫分析了異步電機(jī)氣隙偏心對電磁噪聲的影響,指出偏心會(huì)使某些交流電機(jī)有時(shí)在個(gè)別頻譜成分中出現(xiàn)較高的噪聲級,給出了電機(jī)靜態(tài)和動(dòng)態(tài)偏心下的氣隙磁導(dǎo)公式,指出偏心時(shí)會(huì)產(chǎn)生附加磁場,其氣隙磁密幅值正比于相對偏心率的一半;并舉例說明一臺(tái)500千瓦4極異步電動(dòng)機(jī),當(dāng)偏心值為0.1時(shí),其法向電磁振動(dòng)為78分貝[2]。1977年捷克斯洛伐克科學(xué)院教授B.Heller和V.HAMATA博士指出轉(zhuǎn)子偏心會(huì)在氣隙中產(chǎn)生新的諧波,這些諧波與具有相同階次但不同頻率的其他諧波干涉產(chǎn)生一個(gè)合成諧波時(shí),會(huì)造成零階振動(dòng);同時(shí)指出轉(zhuǎn)軸上轉(zhuǎn)子的偏心會(huì)造成引起噪聲的單邊磁拉力[3]。Cameron、Thomson和Dow的研究表明氣隙偏心將導(dǎo)致氣隙圓周方向的磁導(dǎo)不均勻分布,進(jìn)而造成氣隙磁場的不對稱分布,進(jìn)而在定子電流中會(huì)以諧波反映出,證明了氣隙偏心特征的定子電流頻譜,并給出了頻譜成分分量的頻率,表明氣隙偏心頻率成分的分布是從低頻到高頻都存在的,具體取決于電機(jī)的設(shè)計(jì)和結(jié)構(gòu)參數(shù)[4]。
國內(nèi)的陳永校和諸自強(qiáng)教授等在八十年代較早研究了電機(jī)偏心故障對電機(jī)電磁振動(dòng)噪聲的影響,給出了偏心時(shí)產(chǎn)生的磁導(dǎo)波,指出當(dāng)偏心時(shí)會(huì)產(chǎn)生振動(dòng)頻率與轉(zhuǎn)差率有關(guān)的拍頻振動(dòng)[5]。
九十年代到二十一世紀(jì)初,國內(nèi)外學(xué)者針對電機(jī)偏心的研究主要集中在產(chǎn)生的不平衡電磁力特性方面。學(xué)者SmithAC等在文獻(xiàn)[6-9]中針對感應(yīng)電動(dòng)機(jī),研究了轉(zhuǎn)子偏心時(shí)所產(chǎn)生的不平衡磁拉力,運(yùn)用解析法推導(dǎo)出轉(zhuǎn)子偏心時(shí)不平衡磁拉力計(jì)算公式,并進(jìn)行了相關(guān)實(shí)驗(yàn)驗(yàn)證,但由于感應(yīng)電機(jī)與表貼式永磁電機(jī)在結(jié)構(gòu)上存在較大的差異,因此研究結(jié)論并不適用于表貼式永磁電機(jī)。文獻(xiàn)[10]研究了水利發(fā)電機(jī)轉(zhuǎn)子偏心時(shí)磁路飽和對不平衡磁拉力的影響,研究表明轉(zhuǎn)子偏心會(huì)進(jìn)一步加劇不平衡磁拉力,使電機(jī)產(chǎn)生更大的振動(dòng)。學(xué)者Dimitri Torregrossa在文獻(xiàn)[11]中通過場重建法(FRM)在永磁同步電機(jī)部分退磁和轉(zhuǎn)子靜偏心的情況下對電機(jī)轉(zhuǎn)矩脈動(dòng)和振動(dòng)噪聲進(jìn)行深入研究,文中將場重建法所得的結(jié)果與有限元法和實(shí)驗(yàn)法所得的結(jié)果進(jìn)行對比,驗(yàn)證了該方法的可行性,然后分別對部分退磁和轉(zhuǎn)子偏心時(shí)電機(jī)的徑向、切向電磁力,轉(zhuǎn)矩脈動(dòng)的狀況進(jìn)行深入分析,通過與電機(jī)正常運(yùn)行時(shí)對比,指出永磁同步電機(jī)部分去磁和轉(zhuǎn)子靜偏心使電機(jī)運(yùn)行時(shí)轉(zhuǎn)矩脈動(dòng)和振動(dòng)噪聲大大增加,轉(zhuǎn)子靜偏心的作用尤為明顯。文獻(xiàn)[12]運(yùn)用等效剩磁法對永磁電動(dòng)機(jī)轉(zhuǎn)子偏心時(shí)的磁場進(jìn)行計(jì)算,對轉(zhuǎn)子偏心時(shí)磁密諧波特性進(jìn)行了分析,將解析模型與有限元模型結(jié)果對比,驗(yàn)證了所提方法的準(zhǔn)確性,該研究為下步分析轉(zhuǎn)子偏心時(shí)徑向電磁力波和電磁振動(dòng)特性奠定了一定的理論基礎(chǔ)。文獻(xiàn)[13-14]運(yùn)用解析分析法對轉(zhuǎn)子未偏心時(shí)永磁同步電機(jī)徑向電磁力波表達(dá)式進(jìn)行了詳細(xì)推導(dǎo),得到電機(jī)空載和負(fù)載運(yùn)行時(shí)的徑向電磁力波幅值、頻率及空間階次特性。文獻(xiàn)[15-17]從分析徑向電磁力波入手,對電機(jī)振動(dòng)噪聲特性進(jìn)行研究,找出了對電機(jī)振動(dòng)噪聲影響較大的分量,分析了電機(jī)相關(guān)設(shè)計(jì)參數(shù)對電機(jī)電磁振動(dòng)噪聲的影響,提出了準(zhǔn)確預(yù)測電機(jī)電磁振動(dòng)噪聲的方法并通過相關(guān)實(shí)驗(yàn)進(jìn)行了驗(yàn)證。
近年來,隨著工業(yè)4.0以及未來智能工廠概念的提出,對轉(zhuǎn)子偏心故障的研究主要集中在振動(dòng)監(jiān)控和故障診斷技術(shù)方面。2015年國外學(xué)者Ilhan Ayd?n等人提出了運(yùn)用多傳感器對感應(yīng)電機(jī)的溫度、振動(dòng)、電流等進(jìn)行無線檢測并根據(jù)檢測結(jié)果對判斷電機(jī)是否正常運(yùn)行[18]。ABB公司在2017年推出了電機(jī)智能監(jiān)測系統(tǒng)ABB AbilityTMSmart Sensor新產(chǎn)品,通過在電機(jī)機(jī)殼側(cè)面安置的無線藍(lán)牙智能傳感器實(shí)時(shí)監(jiān)測電機(jī)運(yùn)行狀態(tài),包括電機(jī)運(yùn)行時(shí)X軸、Y軸和Z軸的振動(dòng)位移、速度和加速度情況,以及電機(jī)溫升等參數(shù),并將這些數(shù)據(jù)上傳至云端進(jìn)行后臺(tái)處理,最后判斷出電機(jī)當(dāng)前運(yùn)行是否正常,但目前該產(chǎn)品還處于市場初級階段,且只針對低壓小功率異步電動(dòng)機(jī)。
目前,電機(jī)無線監(jiān)控智能故障診斷技術(shù)主要針對電機(jī)運(yùn)行的“健康”狀況進(jìn)行無線監(jiān)控,對其振動(dòng)、噪聲、溫度和濕度等運(yùn)行參數(shù)信號進(jìn)行實(shí)時(shí)采集,并通過接收設(shè)備傳送到云端,由后臺(tái)下載數(shù)據(jù)后通過智能診斷系統(tǒng)對數(shù)據(jù)進(jìn)行綜合分析,從而判斷電機(jī)的綜合運(yùn)行狀況,預(yù)測電機(jī)使用壽命。其中對電機(jī)運(yùn)行時(shí)各位置振動(dòng)狀態(tài)的實(shí)時(shí)判斷是該智能故障診斷技術(shù)的核心。因此,如何能夠快速的診斷電機(jī)適時(shí)運(yùn)行狀態(tài)十分重要。
綜上所述,關(guān)于電機(jī)轉(zhuǎn)子偏心故障問題的研究主要集中在產(chǎn)生的氣隙磁導(dǎo)、不平衡磁拉力以及氣隙磁場的分析,且多數(shù)研究集中在感應(yīng)電機(jī),對永磁電機(jī)偏心的研究相對較少,而且大部分為解析法推導(dǎo)和有限元驗(yàn)證,并沒有通過具體的偏心實(shí)驗(yàn)來驗(yàn)證。而對表貼式永磁電機(jī),更是缺乏一套行之有效的偏心故障快速診斷方法來判斷電機(jī)運(yùn)行時(shí)的可靠性,因此缺乏一定的工程實(shí)踐性。
在前人研究工作的基礎(chǔ)上,本文提出了一種通過無線振動(dòng)測試系統(tǒng)實(shí)時(shí)監(jiān)測振動(dòng)頻譜信號來判斷表貼式永磁同步電機(jī)是否出現(xiàn)偏心故障的快速診斷方法。首先運(yùn)用解析分析法比較轉(zhuǎn)子靜態(tài)偏心和動(dòng)態(tài)偏心時(shí)徑向電磁力波與轉(zhuǎn)子未偏心時(shí)的差異,從理論分析中找到轉(zhuǎn)子靜、動(dòng)態(tài)偏心時(shí)新增的徑向電磁力波階次與頻率,作為判斷轉(zhuǎn)子靜、動(dòng)態(tài)偏心的重要理論依據(jù);其次,通過兩臺(tái)電機(jī)實(shí)例利用有限元仿真驗(yàn)證解析分析的正確性;最后通過無線振動(dòng)測試實(shí)驗(yàn),對比轉(zhuǎn)子正常和偏心狀態(tài)運(yùn)行時(shí)的振動(dòng)速度頻譜,從而進(jìn)一步驗(yàn)證該轉(zhuǎn)子偏心故障快速診斷方法在實(shí)際工程中的應(yīng)用。
1 轉(zhuǎn)子偏心解析分析
首先從氣隙磁密出發(fā),運(yùn)用解析法分別推導(dǎo)出轉(zhuǎn)子正常、靜態(tài)偏心和動(dòng)態(tài)偏心時(shí)新增徑向電磁力波解析表達(dá)式,找出偏心時(shí)新增的電磁力波階次和頻率,為偏心振動(dòng)故障的快速診斷方法提供必要的理論依據(jù)。為方便說明,本文中以2pτ為基準(zhǔn)波長,p為電機(jī)極對數(shù),τ為極距。
1.2轉(zhuǎn)子偏心時(shí)徑向氣隙磁密
轉(zhuǎn)子偏心分靜態(tài)偏心和動(dòng)態(tài)偏心兩種情況。當(dāng)轉(zhuǎn)子旋轉(zhuǎn)中心與定子中心軸線不重合,轉(zhuǎn)子各機(jī)械角對應(yīng)的氣隙長度不隨轉(zhuǎn)子旋轉(zhuǎn)而變化,此時(shí)轉(zhuǎn)子為靜偏心,如圖1中a圖所示。例如在裝配過程中轉(zhuǎn)子轉(zhuǎn)軸幾何中心與定子鐵芯幾何中心線不重合時(shí)會(huì)出現(xiàn)靜偏心。
當(dāng)轉(zhuǎn)子旋轉(zhuǎn)中心軸線與定子中心軸線重合但與轉(zhuǎn)子靜止時(shí)的中心軸線不重合時(shí),即氣隙不同位置氣隙大小隨著轉(zhuǎn)子旋轉(zhuǎn)而改變時(shí),轉(zhuǎn)子為動(dòng)態(tài)偏心,此時(shí)不同機(jī)械角對應(yīng)的氣隙長度隨時(shí)間而變化,如圖1中b圖所示。例如在轉(zhuǎn)子鐵芯加工過程中內(nèi)外圓不同心或者電機(jī)受到?jīng)_擊導(dǎo)致軸發(fā)生彎曲變形等因素造成轉(zhuǎn)子動(dòng)偏心。
根據(jù)上述解析推導(dǎo),利用MATLAB編寫電機(jī)偏心和未偏心時(shí)的徑向電磁力波解析計(jì)算程序,以一臺(tái)額定功率4.2kW表貼式永磁同步電機(jī)為例,電機(jī)相關(guān)參數(shù)如表3所示。對其靜態(tài)偏心和動(dòng)態(tài)偏心下徑向電磁力波進(jìn)行解析計(jì)算,并與未偏心時(shí)的徑向電磁力進(jìn)行對比。使轉(zhuǎn)子偏心距分別為氣隙的30%和60%,計(jì)算轉(zhuǎn)子靜偏心和動(dòng)偏心時(shí)力波的空間階次分布和頻率分布,并將計(jì)算結(jié)果與轉(zhuǎn)子未偏心時(shí)對比。
圖3、4分別為偏心距為氣隙長度的30%和60%時(shí)轉(zhuǎn)子靜偏心和動(dòng)態(tài)偏心下力波的空間諧波分布和轉(zhuǎn)子未偏心時(shí)的對比圖。由解析分析可知,轉(zhuǎn)子未偏心時(shí),主要產(chǎn)生階數(shù)為0和8的電磁力波。當(dāng)轉(zhuǎn)子發(fā)生偏心后,除了產(chǎn)生0階和8階徑向電磁力波,還會(huì)產(chǎn)生1階、7階和9階幅值較大的徑向電磁力波,對應(yīng)于解析分析中新增的階數(shù)為(r±1)的徑向電磁力波。以基波電流頻率為基準(zhǔn)頻率,力波實(shí)際頻率除以基準(zhǔn)頻率便得到力波的倍頻數(shù),如表3所示,靜偏心時(shí)新增力波頻率為kf1,則相應(yīng)倍頻數(shù)為k;同理,轉(zhuǎn)子動(dòng)偏心時(shí)新增力波倍頻數(shù)為(k±1/p)。
由圖中結(jié)果可以看出當(dāng)轉(zhuǎn)子靜偏心時(shí),1階力波對應(yīng)的頻率為0Hz,盡管力波階數(shù)低但不會(huì)引起振動(dòng),7階和9階力波對應(yīng)的倍頻數(shù)為2,因此轉(zhuǎn)子靜偏心后,二倍頻振動(dòng)分量會(huì)相應(yīng)增大。轉(zhuǎn)子動(dòng)偏心時(shí),1階力波對應(yīng)的倍頻數(shù)為1/4,由于力波階數(shù)較低,幅值較大,因此轉(zhuǎn)子動(dòng)偏心后1/4倍頻的振動(dòng)分量會(huì)明顯增大,此外7階和9階力波對應(yīng)的倍頻數(shù)為7/4和9/4,因此轉(zhuǎn)子動(dòng)偏心后還會(huì)產(chǎn)生倍頻數(shù)為7/4和9/4的振動(dòng)分量。圖中還可看出,無論轉(zhuǎn)子發(fā)生動(dòng)偏心或是靜偏心,其產(chǎn)生的空間階次和幅值是相等的。通過圖3和圖4對比可以看出偏心距越大,新增力波幅值也越大。
圖5、6為偏心距分別為氣隙的30%和60%時(shí)轉(zhuǎn)子正常和不同偏心狀態(tài)下的徑向電磁力波的頻域階次分布。以電樞電流基波為基準(zhǔn),將電磁力波的頻率折換成倍頻數(shù)。由解析分析可知,轉(zhuǎn)子不偏心時(shí),主要產(chǎn)生倍頻數(shù)0、2、4、6的徑向電磁力波,當(dāng)轉(zhuǎn)子發(fā)生靜偏心后,不會(huì)產(chǎn)生其他頻率的電磁力波成分,但當(dāng)轉(zhuǎn)子發(fā)生動(dòng)偏心時(shí)會(huì)新增倍頻數(shù)為1/4、7/4和9/4等力波成分。
從上述解析計(jì)算結(jié)果可以看出該4.2kW表貼式永磁電機(jī)當(dāng)轉(zhuǎn)子發(fā)生靜偏心時(shí),會(huì)新增二倍頻率力波分量,階數(shù)小于未偏心時(shí)該頻率所對應(yīng)的力波階數(shù),因此轉(zhuǎn)子靜偏心時(shí)二倍頻振動(dòng)分量會(huì)有所增加;當(dāng)轉(zhuǎn)子發(fā)生動(dòng)偏心時(shí),會(huì)產(chǎn)生1階1/4倍頻、7階7/4倍頻和7階9/4倍頻的力波分量,因此會(huì)產(chǎn)生相應(yīng)頻率的振動(dòng)分量。因此,根據(jù)上述分析結(jié)果,可以通過分析電機(jī)振動(dòng)頻譜特性對電機(jī)的偏心故障進(jìn)行診斷。
2 轉(zhuǎn)子偏心有限元仿真分析
為了驗(yàn)證上述解析分析的結(jié)論,以上述4.2kW永磁同步電機(jī)為例,在Maxwell 2D中建立有限元分析模型,對轉(zhuǎn)子在靜態(tài)偏心和動(dòng)態(tài)偏心兩種運(yùn)行狀態(tài)下進(jìn)行仿真分析,其轉(zhuǎn)子偏心60%下磁密云圖如圖7所示。
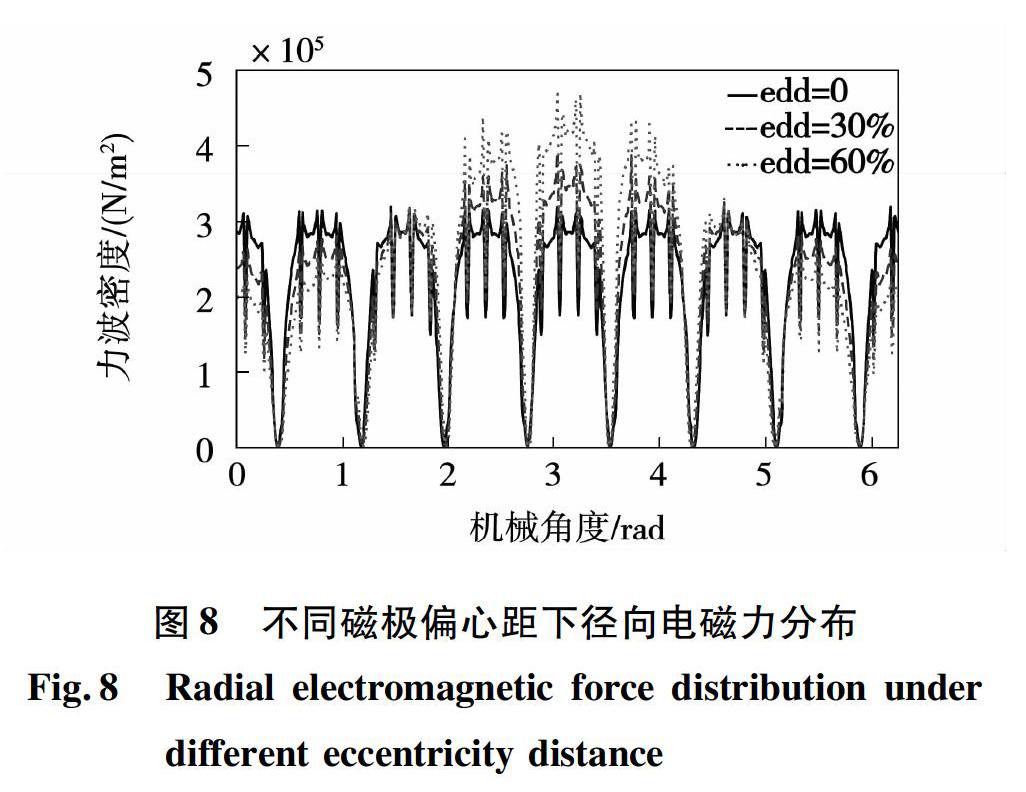
無論轉(zhuǎn)子發(fā)生動(dòng)偏心或靜偏心,其力波空間階次分布是不變的,為了與解析計(jì)算結(jié)果進(jìn)行對比,在有限元仿真中分別計(jì)算偏心距為氣隙的0%、30%和60%下徑向電磁力波波形,計(jì)算結(jié)果如圖8所示。
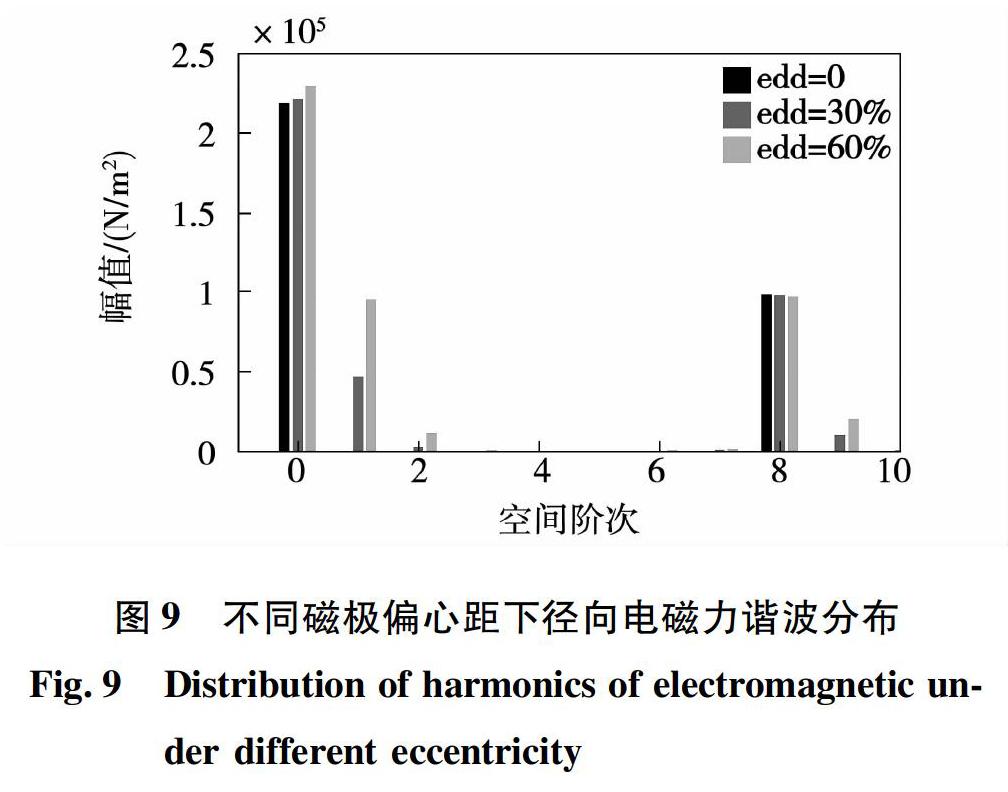
圖中可以看出,當(dāng)轉(zhuǎn)子偏心后,徑向電磁力波會(huì)發(fā)生相應(yīng)的畸變,隨著磁極偏心距的增大波形畸變越大。對所求波形做快速傅里葉變換得到力波空間階次分布,如圖9所示。從圖9中可以看出,轉(zhuǎn)子未偏心時(shí),主要產(chǎn)生階數(shù)為0和8的徑向電磁力波,當(dāng)轉(zhuǎn)子偏心后,新增階數(shù)為1、7和9的徑向電磁力波,正好對應(yīng)于階次為(r±1)的力波分量。隨著磁極偏心距的增大,新增力波幅值會(huì)相應(yīng)的增大。
圖9的有限元結(jié)果與圖3、4的解析結(jié)果相比力波的幅值明顯降低,原因是解析計(jì)算時(shí)并未考慮鐵芯飽和的影響,導(dǎo)致氣隙減小位置處磁密大于實(shí)際磁密,因此有限元仿真和解析計(jì)算在力波幅值計(jì)算結(jié)果上存在一定的差異,但新增的力波階數(shù)及頻率是相同的。
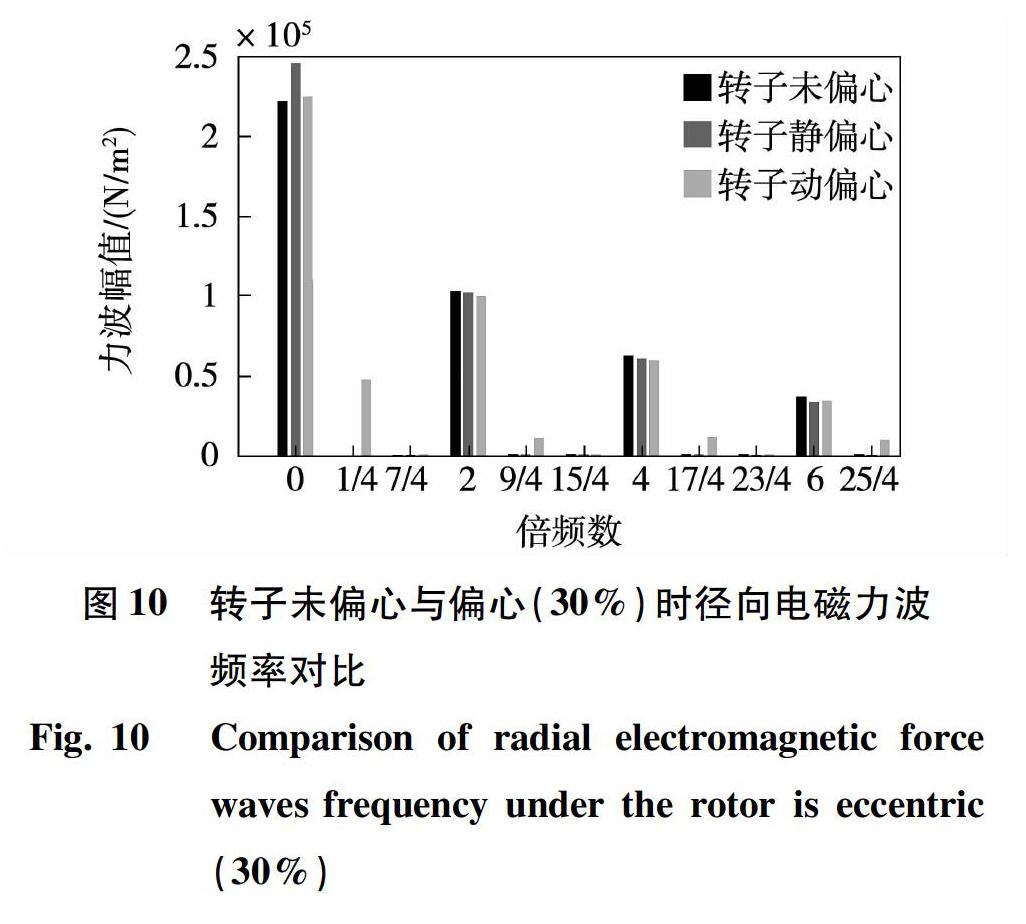
將偏心距分別設(shè)置為氣隙的30%、60%,計(jì)算不同偏心距下徑向電磁力波頻率分布并與轉(zhuǎn)子未偏心時(shí)的頻率分布進(jìn)行對比,結(jié)果如圖10和圖11所示。從圖10和圖11中可以看出,轉(zhuǎn)子靜偏心時(shí)力波頻率分布同轉(zhuǎn)子未偏心時(shí)相同,但當(dāng)轉(zhuǎn)子發(fā)生動(dòng)偏心時(shí),會(huì)新增倍頻數(shù)為1/4、7/4和9/4等力波成分。隨著磁極偏心距的增大,新增力波幅值也相應(yīng)的增大。
通過對電機(jī)進(jìn)行偏心和未偏心時(shí)有限元仿真結(jié)果對比,發(fā)現(xiàn)轉(zhuǎn)子偏心后會(huì)新增空間階次為1、7、9的力波分量,當(dāng)轉(zhuǎn)子動(dòng)偏心后還會(huì)新增倍頻數(shù)為1/4、7/4、9/4的力波分量,進(jìn)一步驗(yàn)證了解析分析結(jié)論,但由于解析分析中未考慮鐵芯飽和的作用,因此有限元仿真和解析計(jì)算在力波幅值計(jì)算結(jié)果上存在一定差異。
為了進(jìn)一步驗(yàn)證解析結(jié)論的通用性,以另一臺(tái)70W 4極小型表貼式永磁電機(jī)為例,其基本參數(shù)如表4所示,偏心磁密分布如圖12所示,運(yùn)用有限元法對電機(jī)轉(zhuǎn)子正常、靜態(tài)偏心60%和動(dòng)態(tài)偏心60%下的徑向電磁力波進(jìn)行空間分布和頻率分布對比如圖13和圖14所示。
由圖13可以看出,當(dāng)轉(zhuǎn)子正常時(shí),電機(jī)徑向電磁力波空間階次主要為0、2、4、6、8,但當(dāng)轉(zhuǎn)子發(fā)生動(dòng)態(tài)偏心或靜態(tài)偏心時(shí),新增空間階次為1、3、5、7、9的徑向電磁力波,對應(yīng)于(r±1)階徑向電磁力波。
由圖14可以看出,轉(zhuǎn)子正常與發(fā)生靜態(tài)偏心時(shí),電機(jī)徑向電磁力波倍頻數(shù)主要為2、4、6,但轉(zhuǎn)子發(fā)生動(dòng)態(tài)偏心時(shí)會(huì)新增階數(shù)為1/2、3/2、5/2、7/2、9/2、11/2、13/2,對應(yīng)于倍頻數(shù)為(k±1/p)的徑向電磁力波。
通過上述兩臺(tái)表貼式永磁同步電動(dòng)機(jī)有限元分析結(jié)果證實(shí)了前面解析法得出的可以通過分析電機(jī)振動(dòng)頻譜特性對電機(jī)偏心故障進(jìn)行診斷的結(jié)論。
3 實(shí)驗(yàn)驗(yàn)證
為了驗(yàn)證解析分析和有限元仿真分析的正確性,采用無線故障診斷技術(shù)對振動(dòng)速度進(jìn)行測試,診斷流程圖如圖15所示。首先將工廠里的永磁同步電動(dòng)機(jī)電機(jī)加裝無線傳感器;無線傳感器將各電機(jī)的實(shí)時(shí)運(yùn)行振動(dòng)檢測信號傳給無線信號處理器;由無線信號處理器上傳到云端數(shù)據(jù)存儲(chǔ)平臺(tái);通過計(jì)算機(jī)對下載的云端數(shù)據(jù)進(jìn)行后臺(tái)故障診斷分析;最終將處理結(jié)果反饋給智能工廠中央處理器并由中央處理器對電機(jī)發(fā)出繼續(xù)運(yùn)行或停機(jī)維護(hù)的指令。
本文研究的4.2kW電機(jī)無線振動(dòng)測試實(shí)驗(yàn)如圖16所示。在被測電機(jī)機(jī)殼表面安裝無線速度傳感器,首先對轉(zhuǎn)子正常時(shí)的運(yùn)行狀態(tài)進(jìn)行振動(dòng)速度測試,測得電機(jī)運(yùn)行正常時(shí)機(jī)殼表面的徑向振動(dòng)速度,并通過自編的振動(dòng)頻譜分析程序自動(dòng)識別電機(jī)振動(dòng)速度的倍頻數(shù),然后再做偏心實(shí)驗(yàn)。由于模擬偏心難度較大,因此實(shí)驗(yàn)時(shí)采用將電機(jī)兩邊端蓋兒外表面進(jìn)行邊緣打磨,使軸裝配中心與定子中心發(fā)生偏離,由于偏心距太小試驗(yàn)結(jié)果不明顯,偏心距太大安裝較為困難,故本試驗(yàn)選取使電機(jī)主軸軸線與轉(zhuǎn)子鐵芯中心線偏心約為氣隙的30%來模擬轉(zhuǎn)子靜態(tài)偏心。
為了模擬轉(zhuǎn)子動(dòng)態(tài)偏心運(yùn)行,一般運(yùn)用火焰矯正法使軸發(fā)生彎曲或運(yùn)用線切割法使轉(zhuǎn)子中心孔偏移一定的距離。火焰矯正法即使用乙炔火焰以不均勻加熱的方式對轉(zhuǎn)子軸的某一位置進(jìn)行高溫(600~800℃)加熱,待冷卻后會(huì)產(chǎn)生收縮變形,從而使轉(zhuǎn)子發(fā)生橢圓變形,但此方法的關(guān)鍵是掌握火焰局部加熱引起的變形規(guī)律,需控制溫度和重復(fù)加熱次數(shù)。由于該方法對工藝要求較高,因此,本文采用線切割使轉(zhuǎn)子中心孔偏移的方法來實(shí)現(xiàn)轉(zhuǎn)子動(dòng)偏心。具體如圖17所示,將轉(zhuǎn)子軸中心孔偏移,使轉(zhuǎn)子動(dòng)偏心時(shí)的偏心距為氣隙長度的30%。
圖18為轉(zhuǎn)子正常和發(fā)生靜、動(dòng)態(tài)偏心時(shí)速度隨時(shí)間變化的波形圖,從圖中可以看出當(dāng)轉(zhuǎn)子偏心時(shí)振動(dòng)速度明顯偏大。對其進(jìn)行快速傅里葉變換得到振動(dòng)速度頻譜圖,如圖19所示。
從圖19中試驗(yàn)結(jié)果可以看出,當(dāng)轉(zhuǎn)子動(dòng)偏心時(shí)電機(jī)整體振動(dòng)水平要高于電機(jī)轉(zhuǎn)子正常時(shí)的振動(dòng)水平。由于電機(jī)極對數(shù)為4,因此產(chǎn)生的機(jī)械轉(zhuǎn)頻振動(dòng)分量基頻為1/4 f1,圖中無論轉(zhuǎn)子是否偏心都存在倍頻數(shù)為1/4、3/4、6/4的振動(dòng)分量,即為機(jī)械轉(zhuǎn)頻振動(dòng)的1、3、6次分量。與轉(zhuǎn)子正常振動(dòng)速度頻譜相比,轉(zhuǎn)子偏心時(shí)后2倍頻振動(dòng)分量明顯增大,說明轉(zhuǎn)子發(fā)生靜偏心,同時(shí)1/4倍頻振動(dòng)分量也顯著增大,并且新增了9/4倍頻振動(dòng)分量,兩者恰好對應(yīng)于倍頻數(shù)為(k±1/p)次電磁力波分量,說明轉(zhuǎn)子發(fā)生動(dòng)偏心。
綜上所述,從解析推導(dǎo)和有限元分析中均發(fā)現(xiàn)當(dāng)轉(zhuǎn)子發(fā)生靜偏心時(shí)雖然徑向電磁力波頻率不變,但較不偏心時(shí)幅值有所增加,可通過與正常狀態(tài)下振動(dòng)速度頻譜幅值對比來判斷是否發(fā)生靜偏心故障;當(dāng)發(fā)生動(dòng)偏心時(shí)會(huì)新增倍頻數(shù)為分?jǐn)?shù)的電磁力波分量,而這些分量會(huì)產(chǎn)生較大的振動(dòng),因此可通過分析振動(dòng)速度頻譜中新增倍頻數(shù)來診斷電機(jī)是否發(fā)生動(dòng)偏心故障,具體歸納如表5所示。
4 結(jié)論
本文運(yùn)用解析法推導(dǎo)出永磁同步電機(jī)轉(zhuǎn)子偏心時(shí)的徑向電磁力波解析表達(dá)式,得到轉(zhuǎn)子靜態(tài)偏心和動(dòng)態(tài)偏心時(shí)徑向電磁力波空間階次和頻率變化;并從徑向電磁力波著手對轉(zhuǎn)子偏心時(shí)永磁同步電機(jī)電磁振動(dòng)特性進(jìn)行研究,從而提出了一種利用振動(dòng)速度頻譜分析判斷電機(jī)是否發(fā)生靜、動(dòng)態(tài)偏心故障的快速診斷方法。并分別通過有限元仿真和無線振動(dòng)實(shí)驗(yàn)進(jìn)行了驗(yàn)證,可得到結(jié)論:1) 當(dāng)轉(zhuǎn)子發(fā)生靜偏心時(shí)在原有電磁力波基礎(chǔ)上會(huì)新增空間階次為(r±1)且頻率不變的徑向電磁力波分量,新增的同頻低階電磁力波會(huì)極大增加電機(jī)振動(dòng)水平。2) 當(dāng)轉(zhuǎn)子發(fā)生動(dòng)偏心時(shí)在原有電磁力波基礎(chǔ)上會(huì)新增空間階次為(r±1)且頻率為(k±1/p)f1的電磁力波分量。3) 在電機(jī)故障診斷時(shí),如果發(fā)現(xiàn)2倍頻振動(dòng)速度幅值明顯偏大,則可判斷為出現(xiàn)靜偏心故障;如果檢測系統(tǒng)診斷出現(xiàn)倍頻數(shù)為(r±1/p)的振動(dòng)速度信號時(shí),則可判斷電機(jī)出現(xiàn)動(dòng)偏心故障。如果二者同時(shí)出現(xiàn),則可判斷電機(jī)既發(fā)生靜態(tài)偏心故障又發(fā)生動(dòng)態(tài)偏心故障。
參考文獻(xiàn)
唐任遠(yuǎn)等著. 現(xiàn)代永磁電機(jī)理論與設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,2015.
舒波夫(蘇).電機(jī)的噪聲和振動(dòng)[M].北京:機(jī)械工業(yè)出版社,1974.
B. Heller,V.HAMATA.HARMONIC FIELD EFFECTS IN INDUCTION MACHINES. Elsevier Scientific Pub. Co. 1977.
沈標(biāo)正.電機(jī)故障診斷技術(shù)[M].北京:機(jī)械工業(yè)出版社,1996.
陳永校,諸自強(qiáng),應(yīng)善成.電機(jī)噪聲的分析和控制[M].浙江:浙江大學(xué)出版社,1987.
SmithAC, Dorrell D G. Calculation ?and measurement ?of ?unbalanced ?magnetic ?pull ?in ?cage induction ?motors ?with ?eccentric ?rotors.Part 1:analytical ? model[J]. IEE Proc-Electr. Power Appl., 1996, 143(3): 193-201.
Dorrell D G, Smith A C. Calculation ?and measurement ?of ?unbalanced magnetic ?pull ?in ?cage induction ?motors ?with ?eccentric ?rotors.Part 2: experimental investigation[J]. IEE Proc-Electr. Power Appl., 1996, 143(3): 202-210.
Dorrel,D. G. Sources and characteristics of unbalanced magneric pull in three-phase cage induction motors with axial-varying rotor eccentricity[J].IEEE Transactions on Industry Applications,2011,47(1):12-24.
S. Nandi,R. M. Bharadwaj,Hamid A. Toliyat. Performance analysis of a three-phase induction motor under mixed eccentricity condition[J]. IEEE Transactions on Industry Electronics, 2002,17(3):392-399.
Richard Perers,Urban Lundin,Mats Leijon. Saturation effects on unbalanced magnetic pull in a hydroelectric generator with an eccentric rotor[J]. IEEE Transactions on Magnetics,2007,43(10):143-149.
Dimitri Torregrossa, Amir Khoobroo, Babak Fahimi. Prediction of acoustic noise and torque pulsation inPM synchronous machines with static eccentricity and partial demagnetization using field reconstruction method[J]. IEEE Transactions on Industry Electronics, 2012,59(2) :934-944.
張冉,王秀和,楊玉波,等.基于等效剩磁的永磁電動(dòng)機(jī)轉(zhuǎn)子偏心磁場解析計(jì)算[J].電工技術(shù)學(xué)報(bào),2009,24(5):7-12. Zhang Ran,Wang Xiuhe ,Yang Yubo ,Wang Daohan. Analytical prediction of magnetic field in permanent magnet motors with Rotor eccentricity based on the method of equivalent remanence[J]. Transactions of ChinaElectrotechnicalSociety,2009,24(5) :7-12.
宋志環(huán).永磁同步電動(dòng)機(jī)電磁振動(dòng)噪聲源識別技術(shù)的研究[D].沈陽:沈陽工業(yè)大學(xué),2010.
張冉.表面式永磁電機(jī)電磁激振力波及其抑制措施研究[D].濟(jì)南:山東大學(xué),2011.
張磊.車用永磁同步電機(jī)徑向電磁振動(dòng)特性[J].電機(jī)與控制,2012,16(5):34-39.Zhang Lei, Wen Xuhui. Radial electromagnetic vibration model characteristics of PMSMs for electric vehicles[J]. Electric Machines and Control, 2012,16(5):34-39.
左光曙,劉曉璇,于胡明等.永磁同步電機(jī)電磁振動(dòng)數(shù)值預(yù)測與分析[J].電工技術(shù)學(xué)報(bào),2017,32(1):25-30.
Zuo Guangshu, Liu Xiaoxuan, YuHuming. Numerical prediction and analysis of electromagnetic vibration in permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2017,32(1):25-30.
Guillaume Verez,Georges Barakat,Yacine Amara,Ghaleb Hoblos.Impact of pole and slot combination on vibrations and noise of electromagnetic origins in permanent magnet synchronous Motors[J]. IEEE ?Transactions on Magnetics, 2015,51(3):101-104.
Ilhan Ayd?n,Mehmet Karak?se,Erhan Ak?n. Combined intelligent methods based on wireless sensor networks for condition monitoring and fault diagnosis [J]. Journal Intelligent Manufacturing,2015, 26(4):717–729.