船舶起重機減搖機構的設計、建模及試驗
2019-01-18 01:23:58韓廣冬陳海泉張浚哲黃宣軍張先波
中國港灣建設 2019年1期
韓廣冬,陳海泉,張浚哲,黃宣軍,張先波
(1.中交天津港灣工程研究院有限公司,中國交建海岸工程水動力重點實驗室,天津 300222;2.大連海事大學輪機工程學院,遼寧 大連 116026;3.大連海事大學船舶電氣工程學院,遼寧 大連 116026)
0 引言
海上作業環境充滿不確定因素,作業船舶受浪、流、涌、風等海洋環境載荷的影響,船舶會出現較大的搖擺,使得惡劣條件下進行作業非常困難,容易發生安全事故。機械式減搖方面,Tanizumi設計了基于液壓系統的機械阻尼器[1],來減小吊重的搖擺,然而該系統的結構復雜,體積很龐大。Beliveau J.G設計了一種半被動式減搖裝置[2],通過改變系統的共振頻率,從而減小吊重的搖擺。王金諾等人通過一定的簡化處理[3],設計了集裝箱起重機機械減搖結構,并進行了試驗研究,得到其具有一定的減搖效果。陳海泉等人設計了船舶起重機伸縮套管減搖裝置[4-6],進行了仿真和試驗分析,結果顯示伸縮套管裝置具有明顯的減搖效果。Ngo等提出了一種用于抑制集裝箱起重機吊重搖擺的側擺控制機構[7],利用Simulink進行分析,結果表明,該結構可以限制吊重的擺動。電子式減搖方面,最初利用整形的方法設計吊重系統的搖擺控制器,并提出了ZV(zero vibration)整形器[8-9],ZVD(zero vibration and derivative)整形器[10]、EI(extra-insensitive)整形器[11]、SI(specifiedinsensitivity)整形器[12]等。Hong等人提出了增強型輸入整形方法[13],該種控制方法與常規輸入整形方法相比具有明顯的優勢,但還有殘余擺動。Uchiyama在線性系統穩定性理論的基礎上[14],設計回轉式起重機的狀態反饋控制器,通過調節控制的變量參數,對不同繩長具有一定的魯棒性。
本文提出的機械式三繩減搖機構,可以有效地限制吊重的搖擺,并克服現有減搖裝置存在的不足,解決現有船用起重機作業時吊重的擺動問題。
1 減搖裝置的結構及原理
減搖試驗樣機三維圖如圖1所示。起重機本體采用直吊臂、吊索變幅的形式,用于驅動起重機完成起升、變幅、回轉及減搖動作的液壓馬達位于起重機基座之中。起升、變幅吊索由液壓馬達驅動,通過位于起重機塔身的滑輪變向,分別與重物和吊臂連接。起重機配備的機械減搖裝置主要包括折疊減搖臂、減搖索和帶減搖環吊鉤。折疊臂對稱布置在吊臂的兩側,利用液壓缸驅動剛性連桿進行折疊臂的收放。減搖索共有3根,匯集到帶減搖環吊鉤處。

圖1 減搖試驗樣機三維圖Fig.1 Graphic model of anti-swing device for crane
該減搖系統的原理為:3根減搖索共同匯聚在帶減搖環的吊鉤處,三者形成一個穩定的力三角形,3根減搖索的控制方法采用位置-張力控制模型,并有效地減小吊重的擺幅,從而達到限制吊重搖擺的目的。
2 減搖結構建模
為了實現位置-張力控制,在機械結構建模方面,需要建立船用減搖起重機樣機吊重系統空間位置模型和減搖索的張力模型。
2.1 吊重空間位置模型
對減搖試驗樣機的吊重系統進行空間幾何建模,為下一步3根減搖索跟隨起升和變幅吊索進行位置同步運動提供數學模型。減搖試驗樣機的結構簡圖如圖2所示。
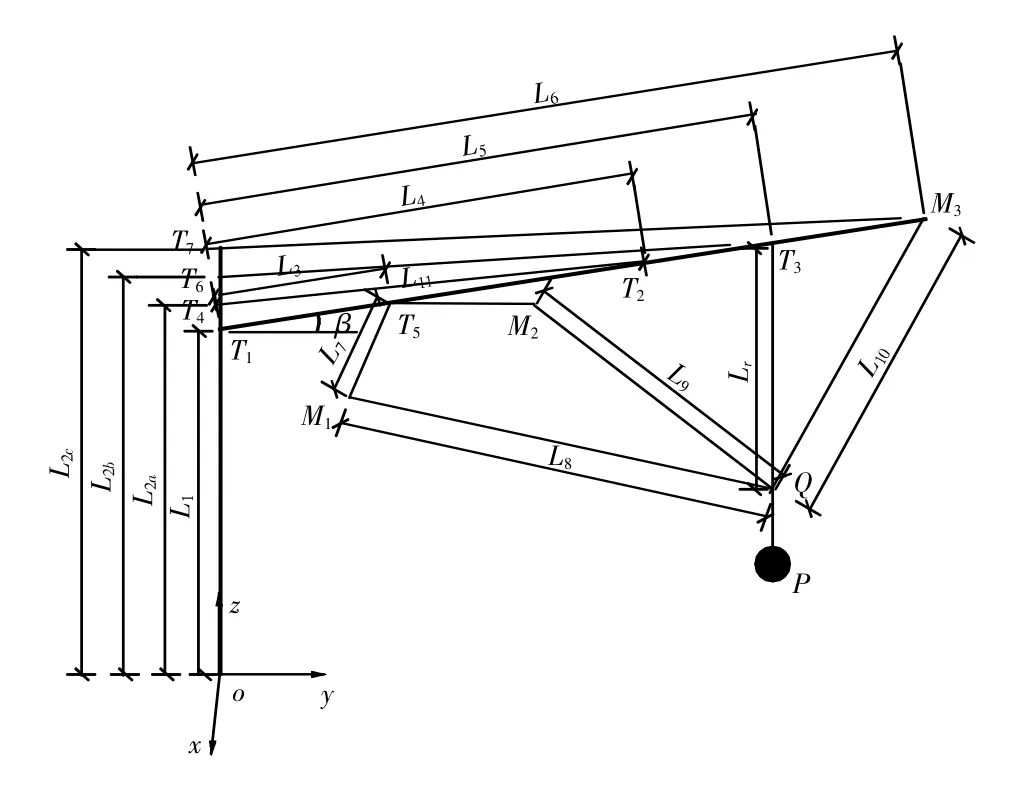
圖2 減搖試驗樣機的結構簡圖Fig.2 The structure diagram of the model of the anti-swing device for crane

由于0≤ β≤ 90°,所以 sin β和cos β均為正值,利用勾股定理得:

將式(3)、式(4)代入式(1)、式(2)可得
在式(5)和式(6)中 L1、L2a、L2b、L2c、L3、L4、L5、L6、L7均為已知值,L11、Lr可利用編碼器得到。

式中:n1、n2分別為起重機變幅、起升卷筒的轉速,r/min。
通過對式(5)~式(8)進行仿真分析,得到減搖索Ⅰ、Ⅱ隨起升、變幅吊索長度的變化曲線,減搖索Ⅲ隨起升、變幅吊索長度的變化曲線,減搖索Ⅰ、Ⅱ、Ⅲ隨起升、變幅吊索長度的變化三維空間曲線分別如圖3~圖4所示。
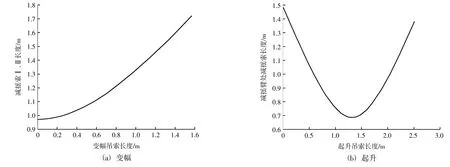
圖3 減搖索Ⅰ、Ⅱ長度與變幅、起升吊索長度關系Fig.3 Relationship between the length of anti-swing cablesⅠ-Ⅱ and luffing-lifting cable

圖4 減搖索Ⅲ長度與變幅、起升吊索長度關系Fig.4 Relationship between the length of anti-swing cableⅢand luffing-lifting cable
從圖3得到減搖索Ⅰ、Ⅱ長度隨變幅吊索長度的增加而增加,隨起升吊索長度的增加呈先減小后增加的趨勢,從圖4得到減搖索Ⅲ長度隨變幅吊索長度的增加呈非線性減小,隨起升吊索長度的增加呈線性增加。
2.2 減搖索靜力學模型
對減搖機構(3根減搖索)的靜力分析見圖5,其中S為折疊臂與減搖索Ⅱ的交點。吊鉤受到自身重力、起升吊索張力及3根減搖索張力作用而保持靜平衡。
其中:

圖5 減搖機構靜力分析圖Fig.5 Static analysis diagram of mechanical anti-swing device

在靜平衡時,主吊索PD處于豎直狀態,P、F、D處于x0oz0平面,則有F1y=0。由于減搖索Ⅱ、Ⅲ在空間位置上具有對稱性,因此只要2根減搖索的張力相等,就可保證y0方向的靜平衡。因此,只需考慮x0和z0方向的靜平衡問題。3根減搖索張力在x0和z0方向的分量為:

其中

由于點N和S的對稱性,所以LPS=LPN。進而得到吊鉤在x0和z0方向的靜力平衡方程為:

由于減搖索Ⅱ、Ⅲ空間位置的對稱性,易知如下關系:

可得到:

通過建立減搖結構的靜力學平衡模型,得到了3根減搖索和主吊索的平衡方程,為不同吊重空間位置減搖索的張力提供理論依據。
3 試驗平臺搭建及試驗
在對試驗樣機進行建模分析的基礎上,為了驗證吊盤式減搖裝置的有效性,利用六自由度搖擺平臺和減搖起重機樣機搭建試驗平臺進行試驗驗證,如圖6所示。其中六自由度搖擺平臺可以實現船舶的橫搖和縱搖,同時搖擺角度可調,試驗縮比樣機按照某起重船進行縮放得到。

圖6 試驗平臺Fig.6 Test platform
試驗條件為吊重質量30 kg,吊索長度1 m,變幅角度為45°,六自由度平臺的搖擺分別為縱搖4°、8°,搖擺周期為6 s,得到以下結果。
1) 縱搖4°
從圖7中可以得到在平臺縱搖角度為4°的情況下,沒有減搖裝置時,吊重的最大面內擺角約為6.21°,施加減搖裝置后,吊重的最大面內擺角約為1.19°,減搖幅度為80.84%;在平臺縱搖角度為4°的情況下,沒有減搖裝置時,吊重的最大面外擺角約為0.67°,施加減搖裝置后,吊重的最大面外擺角約為0.11°,減搖幅度為83.58%。

圖7 縱搖4°擺角曲線圖Fig.7 Curve of swinging angle(pitching 4°)
2) 縱搖8°
從圖8中可得在平臺縱搖角度為8°的情況下,沒有減搖裝置時,吊重的最大面內擺角約為12.06°,施加減搖裝置后,吊重的最大面內擺角約為3.18°,減搖幅度為72.89%;在平臺縱搖角度為8°的情況下,沒有減搖裝置時,吊重的最大面外擺角約為1.18°,施加減搖裝置后,吊重的最大面外擺角約為0.47°,減搖幅度為 60.17%。

圖8 縱搖8°擺角曲線圖Fig.8 Curve of swinging angle(pitching 8°)
4 結語
通過起重機吊重系統的空間幾何模型和減搖索的張力模型,得到3根減搖索長度與起升、變幅繩索長度之間的變化關系,以及3根減搖索的張力與吊重位置的變化關系。在此基礎上,搭建試驗平臺進行試驗研究,得到添加減搖系統后,吊重的擺幅減小60%以上,表明該裝置具有明顯的減搖效果,這對提高船舶起重機的作業效率和安全性具有一定的意義。