懸掛式深松機耕深自動測量及控制方法的研究
2019-01-19 06:08:03楊少奇張磊張含思徐峰李廣宇
農業與技術 2019年24期
楊少奇 張磊 張含思 徐峰 李廣宇
摘?要:針對目前懸掛式深松機耕深自動測量系統在一定坡度的斜面上作業時,不能準確反映深松作業的實際耕深,提出了一種耕深自動測量通用數學模型。在下拉桿上安裝角度傳感器,利用最小二乘法建立水平作業面上的下拉桿角度與深松機耕深的數學模型,通過在拖拉機車身上安裝角度傳感器實時測量作業面的坡面角度,綜合利用下拉桿角度和車身角度建立耕深自動測量通用數學模型。由于拖拉機-懸掛-深松機三者組成剛性連接,在作業面中出現起伏狀況時容易造成實際耕深過深或過淺,所以提出了一種以下拉桿角度為控制目標的耕深控制方法。確定目標耕深后,通過水平作業面耕深測量數學模型換算得到下拉桿的角度作為目標角度,利用車身的實時測量角度進行1次目標角度的修正;車身角度變化反映作業面的起伏,利用車身角度的變化量對目標角度再次修正。2次修正確定最終的目標角度。通過提高耕深的測量精度和控制精度,以提高深松作業效果和作業質量。
關鍵詞:
深松機;耕深;測量;控制方法;坡地
中圖分類號:S233.1
文獻標識碼:A
DOI:10.19754/j.nyyjs.20191230016
引言
深松作業對農作物根系生長、作物耗水和作物產量等有重要的影響作用[1-3]。其中,耕深是深松作業效果和作業質量的重要評價指標,耕深過淺則不能滿足農技要求,不利于作物根系生長,影響作物的生長發育和產量;耕深過深則會增加拖拉機功率消耗,增加作業成本,影響作業效率[4-7]。目前,耕深的測量方法主要包括人工測量和自動測量,人工測量是通過人工扒土的方式對耕深進行測量;自動測量又包括直接測量和間接測量,其中直接測量是基于超聲波測距儀,根據農機具機架距離地面的初始距離和實際距離之差來計算耕深,易受溫度和地表覆蓋物的干擾而影響測量精度;間接測量是基于傾角傳感器,運用拖拉機懸掛和農機具相互之間的幾何關系以及運動學原理,建立耕深與相應運動構件的角度之間的數學模型,從而通過實時采集的角度值計算出耕深[8-12]。然而,這些基于傾角傳感器的耕深測量數學模型僅適用于作業平面為水平面的作業狀況,在一定坡度的斜面上作業或者水平作業面中出現起伏時,通過傾角傳感器的測量角度計算出來的耕深就會有偏差,不能準確反映深松作業的實際耕深。
對耕深的控制方面的研究也取得了一定的進展。
有些學者以耕深為控制目標,通過電機驅動提升器液壓閥門來控制和調節耕深[13,14]。有些學者分別設計了模糊控制器、模糊PID控制器、P—模糊控制器和P—模糊PID控制器等智能控制器實現了耕深的自動控制。在實際控制過程中,先設定目標耕深,并以測量耕深與目標耕深的偏差和偏差率作為智能控制器的輸入,通過智能控制器的輸出來控制電液比例換向閥,電液比例換向閥控制和調節提升液壓缸,實現耕深的自動調節和控制[15-23]。
為了實現在坡面上作業時也可以準確測量深松作業的耕深,本文通過在拖拉機車身上安裝角度傳感器實時反映作業平面坡面角度,提出了一種通用的耕深測量數學模型來提高耕深的測量精度,并利用車身角度以及作業平面起伏而引起車身角度變化量提出了一種耕深控制方法來提高控制精度,旨在提高深松作業效果和作業質量。
1?系統結構
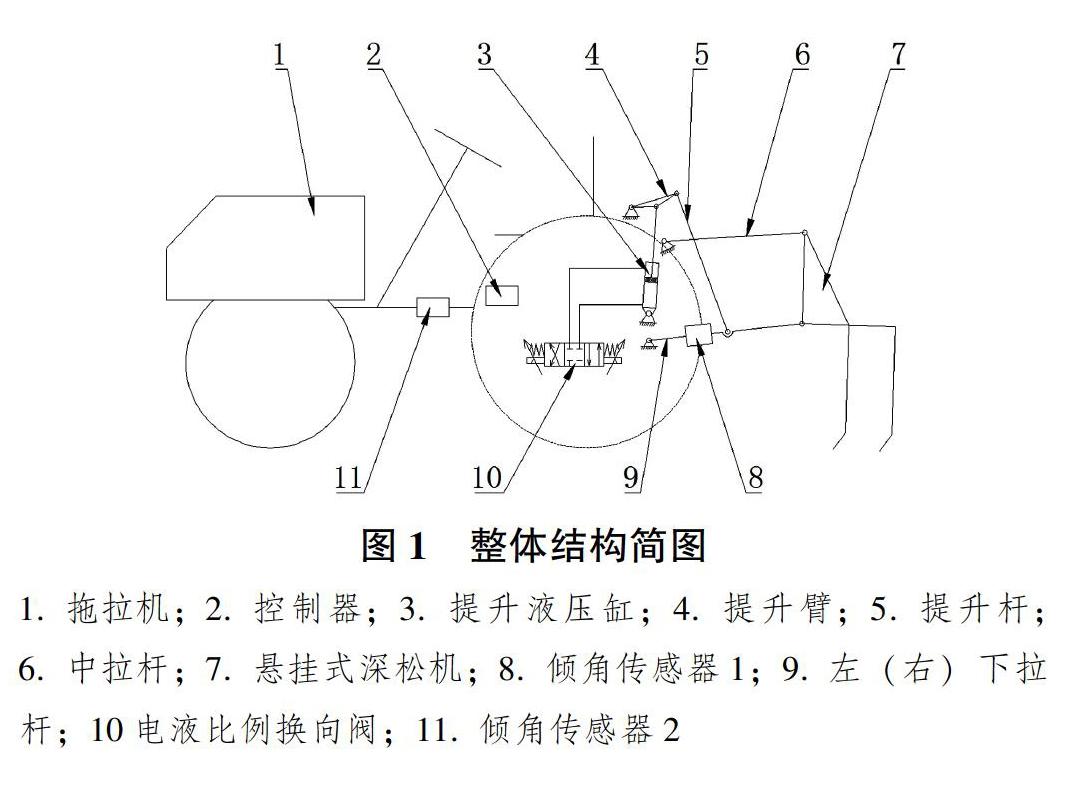
耕深測量控制系統的整體結構主要包括拖拉機、控制器、懸掛式深松機、傾角傳感器、電液比例換向閥和提升液壓缸。其中傾角傳感器有2個,傾角傳感器1安裝在左下拉桿上,傾角傳感器2安裝在拖拉機的車身上。整體結構簡圖如圖1所示。
2?耕深測量原理
2.1?水平作業面耕深測量數學模型
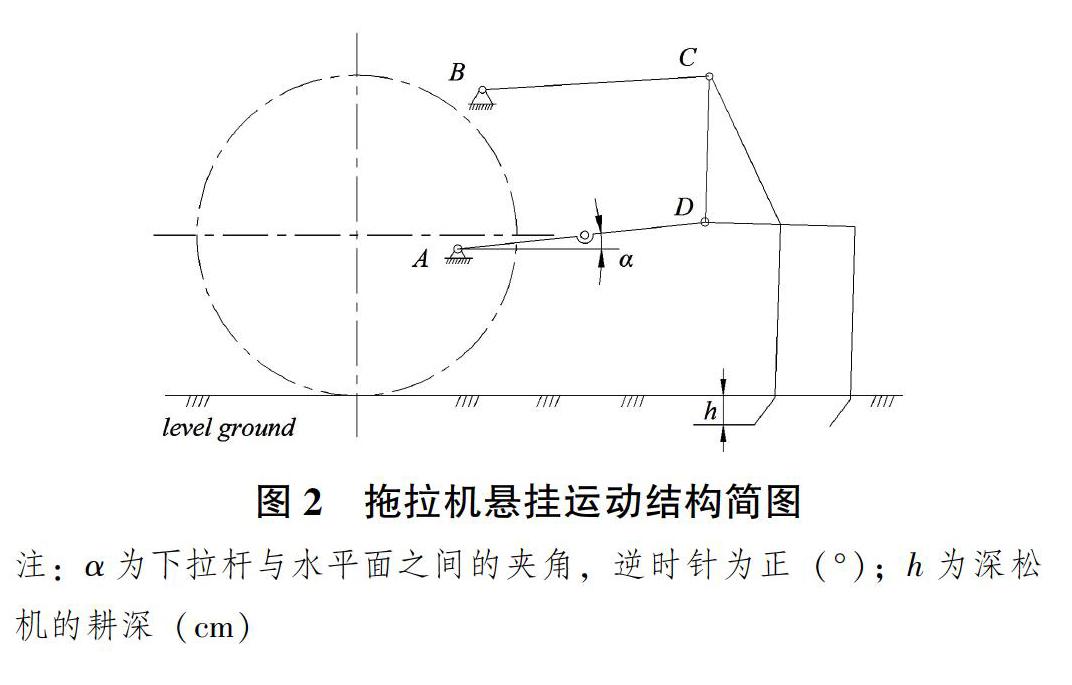
建立水平作業面中的下拉桿角度α與深松機耕深h的數學關系模型,即可通過采集到下拉桿的傾角數值,得到耕深數值。懸掛式深松機的3點懸掛運動結構簡圖如圖2所示,A為下鉸接點,B為上鉸接點,C為上懸掛點,D為下懸掛點,ABCD組成四連桿機構,AB視為機架固定不動,桿CD(即深松機)通過拉桿BC和拉桿AD的連接可以繞著機架旋轉,從而實現深松機的提升或降落。
在深松機從最高點降落到最低點的過程中依次測量若干個數據點,{(αi,hi)}(i=0,1,…,n),利用最小二乘法求出擬合曲線,找出映射關系式即
h=b0+b1α(1)
式中,b0為截距,cm;b1為斜率。
2.2?耕深測量通用數學模型
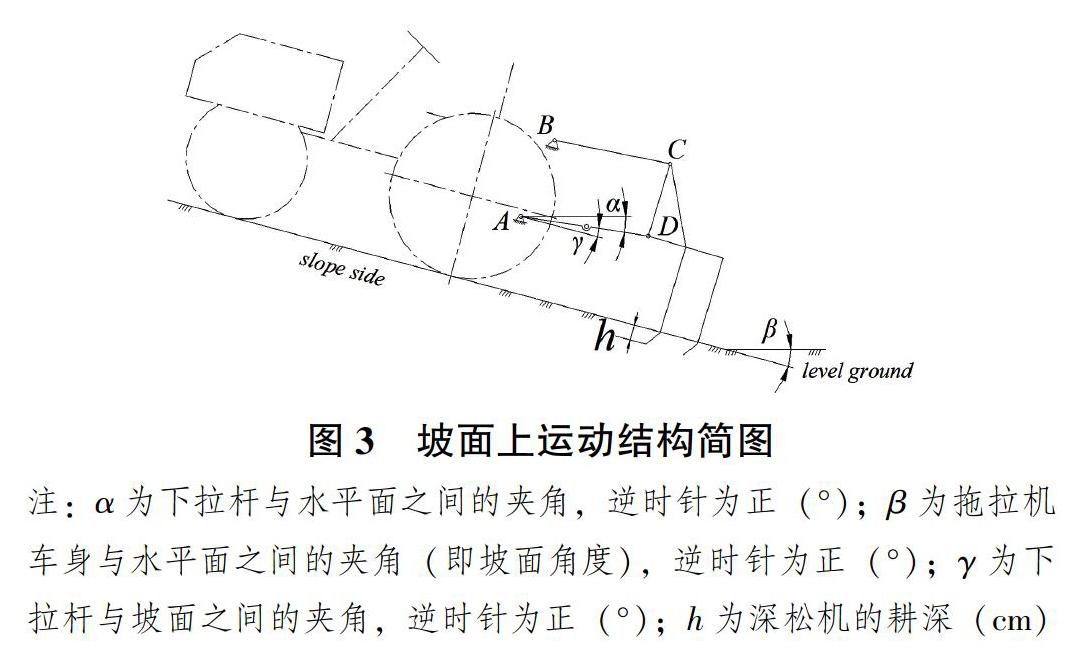
在一定坡度的斜面上作業時,以坡面角度β為例,坡面上的運動結構簡圖如圖3所示。
從圖3中的幾何關系以及考慮到γ角的正負符號可以得出:
γ=α-β(2)
此時,參考水平作業面的耕深測量模型,可以得出坡面上的耕深測量數學模型為:
h=b0+b1(α-β)(3)
利用安裝在拖拉機車身上的角度傳感器實時測量的坡面角度,得出耕深測量的通用數學模型:
h=b0+b1(α-β)+c(4)
式中,c為補償值(cm),其求法是:將深松機調到任意位置保持不動,人工測量的實際耕深與通過式(4)計算的耕深之間的差值即為補償值;
當β=0時,正是水平作業面上的耕深測量數學模型。
3?耕深控制方法
目前,常用的耕深自動控制算法均基于模糊算法。以測量耕深與目標耕深的偏差和偏差率作為模糊算法的輸入,以控制信號作為輸出,從而實現耕深的自動控制和調節。測量耕深的精度直接影響到耕深的控制精度。
首先,確定目標耕深,將目標耕深換算得到水平作業平面上的目標角度:
α=(h-b0-c)/b1(5)
利用實時采集到的車身角度對目標角度進行1次修正,得到新的目標角度:
α=(h-b0-c)/b1+β(6)
由于拖拉機、懸掛、深松機三者組成剛性連接,在作業面中出現起伏狀況時容易造成實際耕深過深或過淺。以作業平面出現突起狀況為例,由圖4可以看出,拖拉機、懸掛、深松機三者組成的剛性連接,在經過此狀況時,容易造成耕深過深,需要進行修正目標角度,以滿足目標耕深的要求。同理,當作業平面出現低伏狀況時,容易造成耕深過淺。
當拖拉機在作業時,作業平面的起伏引起車身傾角β的變化,用△β表示作業平面的起伏變化:
Δβ=β2-β1(7)
式中,β2為當前拖拉機車身傾角數值(°);β1為前1次測量的拖拉機車身傾角數值(°)。
綜合考慮作業平面的角度以及作業平面起伏變化,通過2次對目標角度的修正,最終確定目標角度
α=(h-b0-c)/b1+β-Δβ(8)
耕深自動控制流程圖,如圖5所示。
4?總結
綜合利用下拉桿角度和車身角度,提出了一種耕深自動測量通用數學模型,此模型適用于各種角度的作業平面,可以較真實地反映實際耕深。
由于拖拉機、懸掛、深松機三者組成剛性連接,在作業面中出現起伏狀況時容易造成實際耕深過深或過淺,提出了一種以下拉桿角度為控制目標的耕深控制方法。利用車身的實時測量角度和車身角度的變化量對目標角度進行2次修正,確定最終的目標角度。
為提高耕深的測量精度和控制精度提供理論參考和支持,以提高深松作業效果和作業質量。
參考文獻
[1] 張凱,劉戰東,強小嫚,等.深松處理對豫北農田土壤水分與作物耗水的影響[J/OL].農業機械學報:1-11[2019-08-30].http://kns.cnki.net/kcms/detail/11.1964.s.20190822.1617.016.html.
[2]張瑞富,楊恒山,高聚林,等.深松對春玉米根系形態特征和生理特性的影響[J].農業工程學報,2015,31(05):78-84.
[3]鄭侃,何進,李洪文,等.中國北方地區深松對小麥玉米產量影響的Meta分析[J].農業工程學報,2015,31(22):7-15.
[4]李榮,侯賢清.深松條件下不同地表覆蓋對馬鈴薯產量及水分利用效率的影響[J].農業工程學報,2015,31(20):115-123.
[5]翟振,李玉義,郭建軍,等.耕深對土壤物理性質及小麥-玉米產量的影響[J].農業工程學報,2017(11):123-131.
[6]黃玉祥,杭程光,李偉,等.深松作業效果試驗及評價方法研究[J].西北農林科技大學學報(自然科學版),2015,43(11):228-234.
[7]劉陽春,苑嚴偉,張俊寧,汪鳳珠,牛康.深松作業遠程管理系統設計與試驗[J].農業機械學報,2016,47(01):43-48.
[8]謝斌,李皓,朱忠祥,等.基于傾角傳感器的拖拉機懸掛機組耕深自動測量方法[J].農業工程學報,2013,29(4):15-21.
[9]尹彥鑫,王成,孟志軍,等.懸掛式深松機耕整地耕深檢測方法研究[J].農業機械學報,2018,49(4):68-74.
[10]杜新武,楊緒龍,龐靖,等.懸掛式旋耕機耕深監測系統設計與試驗[J/OL].農業機械學報:1-11[2019-08-30].http://kns.cnki.net/kcms/detail/11.1964.S.20190610.0906.002.html.
[11]商高高,劉存昊,韓江義.線性擬合與Kalman預測法修正耕深測量誤差[J].農業工程學報,2017,33(22):183-188.
[12]楊少奇.基于BP神經網絡的土壤比阻預測模型[D].長春:吉林大學,2019.
[13]羅錫文,單鵬輝,張智剛,等.基于推桿電動機的拖拉機液壓懸掛控制系統[J].農業機械學報,2015,46(10):1-6.
[14]聶友紅,康杰,何家慧,等.耕深自動調節控制系統設計與試驗研究[J].農機化研究,2015,37(02):143-145.
[15]蔣俊,張建,馮貽江,等.丘陵山地拖拉機電液懸掛系統的設計與仿真分析[J].浙江師范大學學報(自然科學版),2019,42(01):31-35.
[16]商高高,彭懷江,夏勇.拖拉機耕深模糊自動控制方法及其仿真研究[J].農業現代化研究,2014,35(06):825-829.
[17]魯植雄,郭兵,高強.拖拉機耕深模糊自動控制方法與試驗研究[J].農業工程學報,2013,29(23):23-29.
[18]蔡魯鋒.基于電控液壓系統的拖拉機懸掛裝置耕深自動控制研究[D].長春:吉林大學,2016.
[19]馬勇,李瑞川,徐繼康,等.拖拉機耕深模糊PID自動控制策略研究[J].農機化研究,2019,41(01):241-247.
[20]商高高,謝凌云,季順靜.拖拉機懸掛系統耕深自動控制策略的研究[J].中國農機化學報,2016,37(07):136-140.
[21]王素玉,劉站,李瑞川,等.基于土壤比阻的大功率拖拉機變權重力位綜合控制研究[J].農業機械學報,2018,49(02):351-357.
[22]李明生,趙建軍,朱忠祥,等.拖拉機電液懸掛系統模糊PID自適應控制方法[J].農業機械學報,2013,44(02):295-300.
[23]謝凌云.大馬力拖拉機電液懸掛系統耕深自動控制研究[D].鎮江:江蘇大學,2016.
作者簡介:
楊少奇(1985-),男,碩士,工程師。研究方向:農業機械化和機電一體化;李廣宇(1975-),男,高級工程師。研究方向:農業機械化和機電一體化。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
兒童故事畫報(2013年3期)2013-06-24 05:40:30
