基于協(xié)方差理論的非關(guān)聯(lián)軌道動態(tài)關(guān)聯(lián)算法
2019-01-21 09:30:04,,,
中國空間科學(xué)技術(shù) 2018年6期
關(guān)鍵詞:關(guān)聯(lián)方法
,,,
1. 中國科學(xué)院 國家空間科學(xué)中心,北京 100190 2. 中國科學(xué)院大學(xué),北京 100190
在國內(nèi)外編目實踐中,一些突發(fā)的情況會對正常的編目工作產(chǎn)生不利的影響,例如太陽爆發(fā)干擾了大氣,使得空間目標(biāo)的預(yù)報精度大大降低,也降低了對近地目標(biāo)的編目維持能力,由于極端空間環(huán)境條件下大氣模型精度有限,影響了大量的軌道預(yù)報精度,使得目標(biāo)丟失。一些突發(fā)的衛(wèi)星事件解體會在很短時間內(nèi)增加數(shù)以千計的可跟蹤目標(biāo)[1-3]。在這種情況下,設(shè)備監(jiān)測到的許多目標(biāo)可能沒有編目,非關(guān)聯(lián)軌道 (Uncorrelated Tracks,UCTs)數(shù)據(jù)和沒有編號的目標(biāo)大大增加,目標(biāo)編目數(shù)據(jù)處理中心的負擔(dān)立即增大。此外在目標(biāo)解體初期,目標(biāo)的空間密度還可能引起目標(biāo)混淆。這兩種情況必須在處理中心增大處理能力,以及增加額外的關(guān)聯(lián)過程來克服。大型衛(wèi)星星座的部署也會增加許多空間目標(biāo)。有些空間碎片可能已處于設(shè)備探測能力的邊緣,在觀測條件較好時,設(shè)備偶然能得到觀測數(shù)據(jù),但是,觀測數(shù)據(jù)不足以維持該目標(biāo)的編目,因此目標(biāo)可能丟失。對于光學(xué)觀測設(shè)備,還有可見期的問題[4-10]。
解決這些問題除了增加探測網(wǎng)的探測能力及提高軌道預(yù)報精度外,還需要改進關(guān)聯(lián)算法。采用基于協(xié)方差理論關(guān)聯(lián)算法可以提高短弧段雷達觀測數(shù)據(jù)和稀疏可見期數(shù)據(jù)的關(guān)聯(lián)水平。該計算方法旨在解決UCTs自動關(guān)聯(lián)問題,建立一個更完整的空間對象編目庫。基于協(xié)方差的軌道關(guān)聯(lián)動態(tài)算法是基于軌道不確定性協(xié)方差的動態(tài)算法,利用軌道數(shù)據(jù)的協(xié)方差信息生成完整的軌道狀態(tài)和誤差分布函數(shù),并用于統(tǒng)計關(guān)聯(lián)軌道。如果協(xié)方差準確表示實際軌道誤差分布,那么這個算法是最優(yōu)的、最大化的概率關(guān)聯(lián)。協(xié)方差矩陣可以更有效統(tǒng)計和自動方式關(guān)聯(lián)UCTs。基于協(xié)方差的關(guān)聯(lián)已經(jīng)在精密軌道攝動的模擬中測試,可完成編目10萬個空間目標(biāo)[11]。仿真結(jié)果表明,相對于之前固定門限方法的軌道關(guān)聯(lián),基于協(xié)方差的軌道關(guān)聯(lián)可降低錯誤關(guān)聯(lián)值達兩個數(shù)量級。基于協(xié)方差的數(shù)據(jù)關(guān)聯(lián)方法將提高空間監(jiān)測網(wǎng)低軌道雷達監(jiān)測數(shù)據(jù)的編目分辨能力。
本文建立了線性和無跡卡爾曼濾波協(xié)方差生成和演化算法,分析了兩種協(xié)方差演化的精度,無跡卡爾曼濾波的協(xié)方差演化方法相對線性協(xié)方差演化方法有較高的演化精度。把協(xié)方差演化方法應(yīng)用到印度一箭104星中的20顆衛(wèi)星軌道關(guān)聯(lián)中,仿真結(jié)果表明采用基于協(xié)方差軌道關(guān)聯(lián)具有很好的關(guān)聯(lián)效果。
1 基于軌道協(xié)方差UCTs動態(tài)關(guān)聯(lián)算法模擬分析方法
基于協(xié)方差的UCTs動態(tài)關(guān)聯(lián)算法是把軌道協(xié)方差作為關(guān)聯(lián)時的影響因素,關(guān)聯(lián)量是復(fù)合等概率橢球。當(dāng)探測器的測量誤差是高斯分布并且軌道動力學(xué)為線性時,協(xié)方差關(guān)聯(lián)是最佳關(guān)聯(lián)量。采用此關(guān)聯(lián)方法,相同坐標(biāo)系下兩衛(wèi)星的狀態(tài)量和協(xié)方差須預(yù)報到同一時刻。例如,可以從先前t1時刻的軌道和協(xié)方差預(yù)報到t2時刻軌道,兩軌道狀態(tài)差為:
X2,1=X2(t2)-X1(t2)
(1)
式中:X1(t2)和X2(t2)為空間目標(biāo)在t2時刻的軌道狀態(tài),包括位置和速度。關(guān)聯(lián)過程中通過計算統(tǒng)計量k來衡量兩衛(wèi)星的關(guān)聯(lián)程度。k屬于χ2統(tǒng)計,也被稱為馬氏距離:
k2=[X2,1]T[P1(t2)+P2(t2)]-1[X2,1]
(2)
式中:P1和P2分別為兩衛(wèi)星的軌道協(xié)方差矩陣。
為了實際模擬基于協(xié)方差的軌道關(guān)聯(lián),需要模擬空間目標(biāo)監(jiān)測網(wǎng)的監(jiān)測模型和編目過程。決定從真實雷達測站出發(fā),不同雷達測量數(shù)據(jù)隨機加入測量噪聲,模擬雷達測距及測角數(shù)據(jù)。定軌模塊對這些測量數(shù)據(jù)進行初始軌道確定及最小二乘處理生成軌道及協(xié)方差數(shù)據(jù)。關(guān)聯(lián)模塊根據(jù)定軌目標(biāo)的協(xié)方差數(shù)據(jù)進行演化實現(xiàn)與編目庫和非關(guān)聯(lián)目標(biāo)的關(guān)聯(lián)。
1.1 真實軌道
真實軌道是由數(shù)值軌道傳播器生成的。動力學(xué)方程模型包括太陽輻射光壓,空氣阻力密度模型,第三體的影響作用力和21×21階的重力場[12]。50個物體的軌道狀態(tài)取自軌道碎片編目。這些物體是從空間目標(biāo)目錄里半長軸為6860~6890之間抽樣的。目標(biāo)的橫截面積設(shè)為常值,面積和質(zhì)量與碎片編目的值相同。設(shè)置每一個物體的阻力系數(shù)和光壓反射系數(shù)為默認值。空間目標(biāo)軌道攝動動力學(xué)模型采用的是EGM2008的21階地球重力場模型,NRLMSISE2000大氣阻力模型,球形光壓模型。依據(jù)軌道攝動方程演化計算理論上空間目標(biāo)的真實軌道[13]。
1.2 雷達探測器模擬
依據(jù)現(xiàn)有的雷達跟蹤測量站,模擬空間目標(biāo)的跟蹤測量數(shù)據(jù)。用國外公布的雷達參數(shù)對雷達跟蹤站進行建模。表1所示這些參數(shù)來自美國巴利亞多(Vallado)[14]。對雷達的觀測數(shù)據(jù)進行模擬,包括測距范圍、仰角、方位角、雷達高度、測距標(biāo)準差、仰角標(biāo)準差以及方位角標(biāo)準差。在觀測數(shù)據(jù)中加入了高斯噪聲[15]。每一步都用標(biāo)準差生成隨機偏差模擬高斯噪聲。采用這種標(biāo)準差是因為根據(jù)一段時間對雷達探測器的分析顯示日常偏差標(biāo)準差與測量標(biāo)準差大致相等。如果觀測數(shù)據(jù)超出了方位角和仰角的限制就要去掉[16]。假定某個空間目標(biāo)截面積為1 m2時觀測站最大測量距離為ρmax。雷達的返回值與1/ρ4成正比,其中ρ是測距,所以觀測量應(yīng)滿足:
(3)
式中:A為空間目標(biāo)截面積,兩次測量之間為10 s間隔時,觀測數(shù)據(jù)設(shè)置限制在2′弧段內(nèi)。每個雷達探測器被分配最大數(shù)量的可跟蹤目標(biāo)。
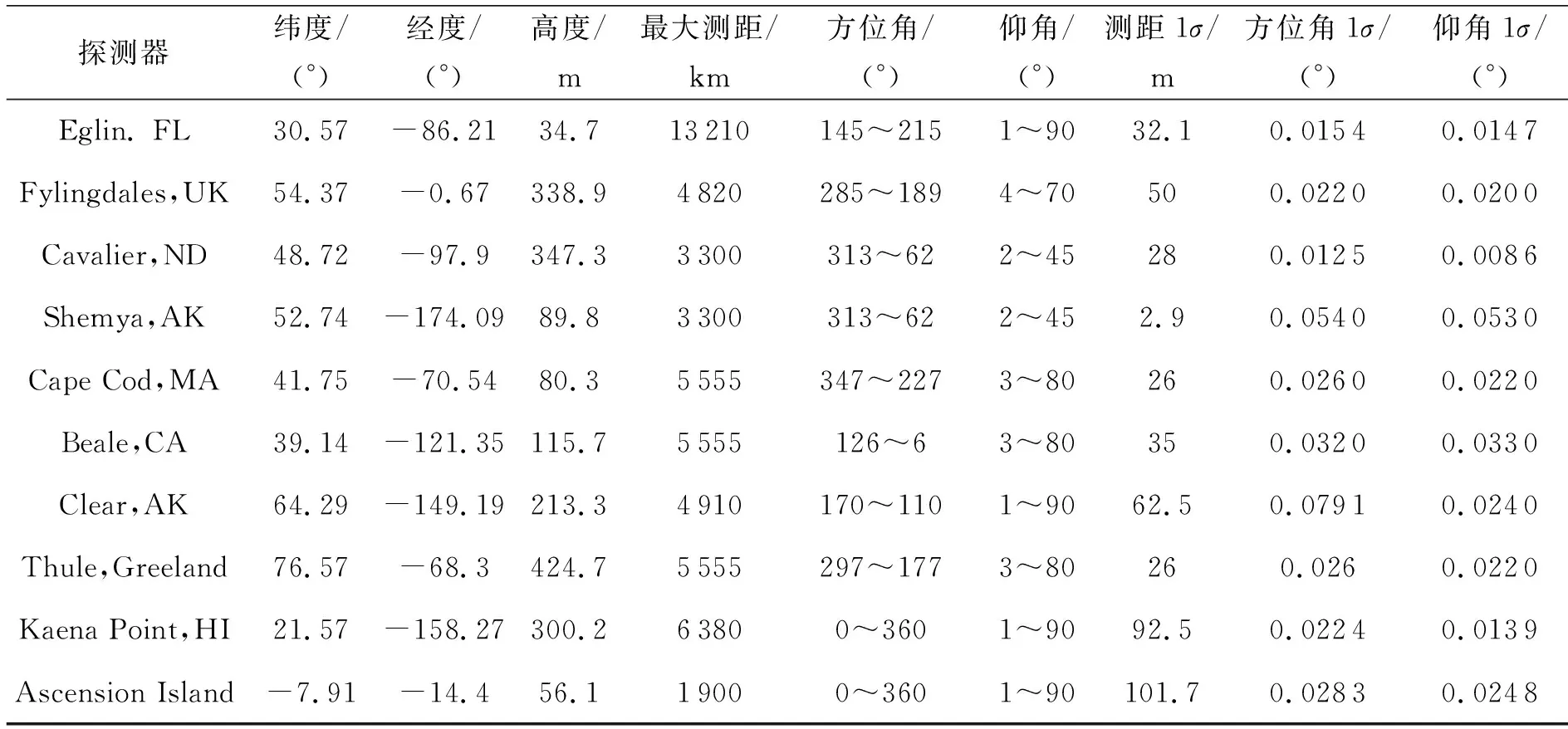
表1 雷達探測器參數(shù)
1.3 軌道確定協(xié)方差
為了測試k值是否可以用來關(guān)聯(lián)編目軌道,選取物體的一個子集部分構(gòu)成了模擬目錄。選用目錄里每個物體的第一軌道,使用測距、方位角、仰角三要素方法進行初始軌道確定。軌道狀態(tài)估計作為最小二乘批處理程序的先驗狀態(tài)。當(dāng)執(zhí)行最小二乘批差分校正時,每一個目錄物體所有前三天的觀測數(shù)據(jù)合并在一起。每個物體的面積和質(zhì)量都設(shè)為默認值(1m2和100 kg),但是要估計阻力系數(shù)及光壓反射參數(shù)的修正值[17-18]。在軌道計算中用數(shù)值計算軌道的傳播。在未來大于三天的時間里,物體估計狀態(tài)隨時間傳播且儲存為星歷表、用來做為一條空間物體目錄。50個空間物體只有30個創(chuàng)建了編目星歷,其他物體的星歷未知。
在先驗?zāi)夸泟?chuàng)建后,所有的真實軌道在未來24 h傳播。用真實軌道可以形成觀測數(shù)據(jù),且已知物體的每個軌道都被設(shè)置了編號。最小二乘差分校正用來獲得每個軌道的狀態(tài)和協(xié)方差估計。由于這些軌道相當(dāng)?shù)亩?120 s),這些單個軌道的估計有很大的不確定性,這在協(xié)方差上得到了反映。
1.4 數(shù)值積分模型的軌道協(xié)方差演化
1.4.1 誤差演化線性化方法
(4)
(5)
對式(5)微分:
(6)

(7)
e(t)=Φ(t,ti)ei+wd(t,ti)
(8)
其中,狀態(tài)轉(zhuǎn)換矩陣Φ(t,ti)滿足:
(9)
線性協(xié)方差轉(zhuǎn)換矩陣Φ(t,ti)計算過程中忽略了高階項的影響,只考慮了一階項。線性協(xié)方差演化是一種分析方法,其優(yōu)點是計算簡化高效。但是對于非線性程度高、協(xié)方差演化周期長或初始協(xié)方差較大情況其計算精度較低[19],不適用于非高斯協(xié)方差演化。
1.4.2 UKF協(xié)方差演化方法
UKF是基于確定性樣點計算的濾波算法,以Unscented變換為基礎(chǔ),采用卡爾曼線性濾波框架和確定性采樣方式進行濾波。UKF采用一組有效的采樣點來將狀態(tài)近似為高斯隨機變量,捕捉高斯隨機變量的均值和協(xié)方差。當(dāng)狀態(tài)量通過實際的非線性系統(tǒng)之后,后驗均值和協(xié)方差可以精確到三階(泰勒展開)。由于不需要推導(dǎo)和計算Jacobian矩陣,基于UT的UKF算法更便于實現(xiàn)。

(1)構(gòu)造Sigma點
(10)
(2)利用Sigma點進行非線性傳播
根據(jù)計算所得Sigma點直接按照離散化非線性模型進行狀態(tài)和觀測預(yù)測,對應(yīng)產(chǎn)生的Sigma樣本點為:
χk(i)=f[χk-1(i),k]
(11)
式中:χk(i)(i=0,…,2n)為預(yù)測的對稱分布Sigma點。
(3)根據(jù)樣本點計算狀態(tài)均值和方差
(12)
(13)
從上面的3個步驟中可以看出,Unscented變換不需要計算非線性函數(shù)的雅可比矩陣,變換中僅涉及函數(shù)計算,即使系統(tǒng)的模型比較復(fù)雜的情況下,算法實現(xiàn)的難度也并不會增加。
1.5 UCTs關(guān)聯(lián)
處理這些軌道的第一步是比較星歷看軌道是否屬于已經(jīng)存在的編目物體,然后更新編目星歷。對于與已經(jīng)編目在案的軌道相符的軌道,采用軌道狀態(tài)值和協(xié)方差計算關(guān)聯(lián)量k值。如果k值小于限定閾值,則認為該軌道匹配且軌道的標(biāo)識或者標(biāo)簽保持不變。如果k值大于限定閾值,則更改標(biāo)簽以表明它是不相關(guān)軌道即UCTs。然后就是把UCTs與所有編目里的物體進行比較。為了減少比較數(shù)量,采用預(yù)測濾波的方法只選擇軌道根數(shù)大致相當(dāng)?shù)男菤v。如果比較值k小于限定閾值,則該軌道被標(biāo)記為屬于物體編目。接著,所有被分配到編目里的新軌道與先前確定的軌道結(jié)合形成新的星歷。這些綜合的觀測數(shù)據(jù)用來估計一個更新的編目軌道并創(chuàng)立一個新的、為期三天的預(yù)報編目星歷。下一步就是UCTs與UCTs之間的關(guān)聯(lián),所有的UCTs形成一個候選軌道數(shù)據(jù)庫,不能與編目庫關(guān)聯(lián)的軌道再與UCTs候選軌道關(guān)聯(lián)。
2 模擬分析
2.1 協(xié)方差演化分析
低軌道目標(biāo)分別選取400 km軌道高度的近圓軌道目標(biāo)國際空間站和1 500 km軌道高度的近圓軌道目標(biāo)Ajisai衛(wèi)星。對國際空間站和Ajisai衛(wèi)星設(shè)定初值協(xié)方差,采用線性協(xié)方差演化方法和UKF協(xié)方差演化方法計算演化時間為一天時,空間站和衛(wèi)星的軌道協(xié)方差在RSW坐標(biāo)系下的分量。RSW坐標(biāo)系的R軸(徑向)是從地球指向航天器方向的矢量,S軸(橫向)在軌道平面內(nèi)垂直于R軸,W軸(垂跡)垂直于軌道面。把演化結(jié)果同STK軟件中高精度軌道(HPOP)協(xié)方差演化結(jié)果比較,分析兩種方法協(xié)方差演化精度。軌道攝動力主要考慮地球引力、大氣阻力、光壓攝動力及第三體引力。地球引力采用的是21階的EGM2008模型,大氣阻力采用的是NRLMSISE2000模型,大氣阻力系數(shù)Cd=2,光壓系數(shù)Cr=1.8。
假設(shè)在J2000坐標(biāo)系下空間站位置三方向初值誤差均為10 m,速度三方向誤差均為0.01 m/s。空間站協(xié)方差演化時長為一天,選取演化時長中的100個點,比較線性方法和UKF方法演化的100個點與HPOP協(xié)方差演化的誤差。圖1中前3個圖采用是兩種方法與HPOP對R、S、W三個方向的演化誤差進行比較,最后1個圖是采用STK中的HPOP對空間站軌道協(xié)方差的演化結(jié)果。
相比較發(fā)現(xiàn),線性方法在S方向一天的協(xié)方差演化誤差是米量級,UKF方法演化誤差是分米量級。UKF協(xié)方差演化誤差精度高于線性方法1個量級。
采用同樣方法對Ajisai衛(wèi)星軌道協(xié)方差演化,結(jié)果如圖2所示,相同的初值協(xié)方差A(yù)jisai衛(wèi)星通過HPOP方法協(xié)方差演化一天的值小于空間站的演化值。這主要是空間站所受的大氣阻力大于Ajisai衛(wèi)星。對于Ajisai衛(wèi)星S方向演化一天的誤差,線性方法是米量級,UKF方法演化誤差是厘米量級。UKF誤差精度高于線性方法兩個量級。對于低軌道空間目標(biāo),軌道高度越高,UKF協(xié)方差演化誤差精度越高。
從圖1和圖2可以看出,對于空間站和Ajisai衛(wèi)星,通過UKF方法演化的R方向協(xié)方差誤差大于線性方法演化誤差。這是由于軌道協(xié)方差隨時間演化呈現(xiàn)非高斯性引起的。采用蒙特卡洛方法可以驗證當(dāng)軌道協(xié)方差演化時長為一天時,空間目標(biāo)的軌道協(xié)方差不再是高斯分布的橢球,而是呈月牙狀。月牙的彎曲方向就是在徑向(R方向)。圖3是采用蒙特卡洛方法演化的軌道協(xié)方差分布圖。對Ajisai衛(wèi)星初始根數(shù)加上位置標(biāo)準差10 m、速度標(biāo)準差0.01 m的隨機誤差,構(gòu)成10 000個采樣點,含隨機誤差的采樣點在與HPOP相同模型攝動力作用下向前傳播一天,把演化后的10 000個采樣點與標(biāo)準精密軌道相差得到蒙特卡洛誤差采樣點分布。從圖3可以看出蒙特卡洛采樣點分布不再是標(biāo)準橢球形,采樣點分布在R方向呈現(xiàn)彎曲的非高斯性分布。這種非高斯性彎曲分布導(dǎo)致R方向誤差協(xié)方差值變大,而UKF方法可以比較明顯地表示這種協(xié)方差演化特性。
2.2 UCTs關(guān)聯(lián)模擬
選取2017年2月印度發(fā)射的一箭104星中的20個目標(biāo)衛(wèi)星做UCTs關(guān)聯(lián),衛(wèi)星軌道半長軸6 860~6 890 km,軌道傾角97.5°,衛(wèi)星軌道區(qū)域分布比較集中。各顆衛(wèi)星之間具有相似的軌道類型,在與箭體分離后一段時間各個衛(wèi)星在同一軌道面上,軌道之間只存在較小的相位差異,采用之前半長軸、軌道傾角篩選再進行空間目標(biāo)編目存在困難,適用于驗證基于協(xié)方差算法軌道關(guān)聯(lián)。
每顆衛(wèi)星選取2~4個不同時間點的軌道星歷,軌道間隔小于兩天。采用美國巴利亞多(Vallado)提供的雷達參數(shù)模擬20個目標(biāo)衛(wèi)星的雷達觀測數(shù)據(jù)。并用HerrickGibbs方法對短弧段各個衛(wèi)星初始軌道進行定軌,用最小二乘法對軌道進行精密定軌,生成衛(wèi)星在某點的軌道根數(shù)及協(xié)方差信息。應(yīng)用軌道預(yù)報方法對軌道根數(shù)進行數(shù)值預(yù)報,通過線性協(xié)方差演化方法和UKF協(xié)方差演化方法對衛(wèi)星初始協(xié)方差進行演化。
20個UCTs模擬真實軌道是基于space-track提供的兩行軌道根數(shù),由于公布的兩行軌道根數(shù)不包含軌道協(xié)方差信息,因此假設(shè)其為真實軌道重新定軌生成協(xié)方差。而兩行軌道根數(shù)本身含有軌道誤差,這可能是關(guān)聯(lián)過程中關(guān)聯(lián)閾值較大的主要原因。同時兩行軌道根數(shù)是以真赤道平春分點(True Equator Mean Equinox,TEME)作為參考坐標(biāo)系,需要轉(zhuǎn)變?yōu)镴2000坐標(biāo)系分析。
圖4是20個衛(wèi)星中,相同衛(wèi)星不同歷元軌道根數(shù)進行協(xié)方差關(guān)聯(lián)的關(guān)聯(lián)量k值的統(tǒng)計分布情況。可以看出20顆衛(wèi)星UCTs關(guān)聯(lián)量分布主要在60~80。分析發(fā)現(xiàn)當(dāng)UCTs關(guān)聯(lián)閾值限定為200時,20顆衛(wèi)星中相同衛(wèi)星不同歷元的軌道根數(shù)都可以成功關(guān)聯(lián)。關(guān)聯(lián)值大的原因作者分析如下:
1)首先文章中選用美國發(fā)布的兩行軌道根數(shù),這種根數(shù)本身存在較大的軌道誤差。由于模擬中選取20顆衛(wèi)星的兩行軌道根數(shù)作為真實軌道,忽略了兩行軌道根數(shù)數(shù)據(jù)本身所含有的誤差,所以計算的關(guān)聯(lián)閾值較大。
2)在雷達觀測數(shù)據(jù)模擬過程中根據(jù)不同雷達測站的噪聲加入了測量誤差。
3)在精密定軌過程中由于弧段較短時不能進行精密定軌確定協(xié)方差,因此在一些衛(wèi)星之間的關(guān)聯(lián)模擬過程中選用了較長的弧段進行定軌,弧段長定軌協(xié)方差小,而馬氏距離計算時協(xié)方差的逆較大,關(guān)聯(lián)值較大。
假設(shè)選取精密的軌道根數(shù)作為真實軌道,短弧段情況下可以計算出軌道協(xié)方差,則關(guān)聯(lián)閾值會大幅下降。
圖5表示相同衛(wèi)星不同歷元間隔對應(yīng)的關(guān)聯(lián)量。可以看出,隨著軌道時間間隔增加關(guān)聯(lián)量逐漸下降,相同軌道時間間隔,不同衛(wèi)星軌道所計算的關(guān)聯(lián)量也不相同。關(guān)于關(guān)聯(lián)閾值的選取需要針對不同衛(wèi)星軌道做進一步的分析。
3 結(jié)束語
本文研究了基于協(xié)方差理論的UCTs動態(tài)關(guān)聯(lián)算法,對比分析了基于雅克比轉(zhuǎn)換的線性協(xié)方差演化方法和基于UT轉(zhuǎn)換的UKF協(xié)方差演化方法。以400 km和1k500kkm軌道高度為例,初始軌道協(xié)方差相同的情況下,基于UT變換的協(xié)方差演化精度要高于基于雅克比轉(zhuǎn)換的線性協(xié)方差方法演化精度。應(yīng)用UKF方法軌道協(xié)方差演化一天的位置誤差分別是分米量級和厘米量級,應(yīng)用線性方法演化一天的位置誤差是米級。
把協(xié)方差演化方法應(yīng)用到UCTs動態(tài)關(guān)聯(lián)中去,模擬印度一箭104星中的20顆衛(wèi)星的軌道關(guān)聯(lián),當(dāng)軌道關(guān)聯(lián)量閾值選取為200時,20顆衛(wèi)星軌道可以全部關(guān)聯(lián)。
軌道協(xié)方差演化有很好的應(yīng)用前景,本文在空間目標(biāo)編目方面,為處理各非關(guān)聯(lián)軌道提出了一種動態(tài)算法,其關(guān)聯(lián)量源于每個非關(guān)聯(lián)軌道的軌道誤差協(xié)方差矩陣。另外空間目標(biāo)碰撞評估的一個重要環(huán)節(jié)是計算兩個空間物體的碰撞概率。碰撞概率的計算使用了相對狀態(tài)概率密度函數(shù)的數(shù)值積分算法。每種算法需要為兩個對象輸入狀態(tài)向量的誤差信息。狀態(tài)向量的誤差信息通過協(xié)方差矩陣的方式來表示。本研究可以為將來的空間目標(biāo)編目和空間碎片預(yù)警提供方法參考。
猜你喜歡
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
兒童故事畫報(2019年5期)2019-05-26 14:26:14
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56