高精度相位參考甚長基線干涉測量技術與試驗驗證
2019-01-21 09:29:58,,,,,,
中國空間科學技術 2018年6期
關鍵詞:測量
,,,,,,
1. 北京航天飛行控制中心,北京 100094 2. 航天飛行動力學技術國家級重點實驗室,北京 100094
中國目前已經開展了多次深空探測,包括“嫦娥一號”(CE-1)、“嫦娥二號”(CE-2)、“嫦娥三號”(CE-3)和“再入返回飛行試驗”(CE-5T1),實現了中國無人探月工程“繞、落、回”三步走中的繞月和落月探測[1-4]。火星探測方面,2016年1月,中國已正式啟動首次火星探測任務,計劃于2020年擇機發射火星探測器,一步實現“繞、落、巡”工程目標,對火星進行環繞探測、著陸探測和巡視探測,對火星的土壤環境、大氣等展開研究[5]。
與探月工程任務相比,首次火星探測任務要求甚長基線干涉測量(VLBI)測量精度更高。干涉測量誤差引起的軌道誤差,隨著距離的增加而變大。相對于地球與月球之間40萬千米的距離,地球與火星之間4億千米的距離將使相同測量精度帶來的軌道誤差放大1 000倍。首次火星探測任務包括地火轉移段、近火捕獲段、停泊段、離軌著陸段等飛行階段,其中近火捕獲段是決定任務成敗的關鍵階段之一。根據近火捕獲段軌道預報精度需求,預期VLBI測量精度將在目前探月工程精度指標基礎上提高半個數量級。因此高精度干涉測量技術研究與驗證對中國火星探測任務實施具有重要意義。
相位參考VLBI技術是射電天體測量對于一對小角距(一般要求小于3°)天體的高精度相對位置測量常用的一種方法[6]。美國國立射電天文臺研究使用了由10臺25 m天線組成的VLBA(甚長基線干涉測量陣)開展相位參考VLBI觀測,用以測量深空探測器的精確位置。2004年1月25日,美國機遇號火星車(MER-B)著陸火星。之前,2004年1月19日、21日和23日,對機遇號火星車著陸進行了VLBI測量。觀測頻段為X頻段(8.45 GHz),參考射電源為3C454.3。該射電源與MER-B的角距小于3°,測量兩者之間相位差,進而計算得到MER-B位置,其測量精度(內符合)為1.2 mrad,較美國深空網測量精度高一倍[7]。
1 相位參考VLBI
1.1 原理闡述
基于無線電干涉測量的基本原理衍生出了多種新測量體制,例如差分VLBI(ΔDOR)、同波束干涉測量(SBI)、相位參考VLBI等。相位參考VLBI技術是射電天體測量對于一對小角距天體的高精度相對位置測量方法,在精確測量三角視差、宇宙尺度等方面發揮了很大的作用[8]。相位參考VLBI的基本原理是,快速交替觀測參考源和目標源,通過觀測參考源差分修正目標信號的相位,并使得不同觀測弧段的相位連續不含模糊度,獲得目標的高精度干涉相時延,從而得到目標的先驗位置和實際位置的修正。
美國NASA從2004年開始利用VLBA觀測陣列,將相位參考VLBI技術應用到深空導航[9],著力于利用航天器常規下行信號解算差分相時延,其難題之一在于干涉相時延模糊度的求解。傳統相位參考VLBI觀測中,小角距天體對之間角位置相對穩定,可以利用地球自轉效應消除干涉相時延模糊度[10]。然而受制于深空探測器的高動態性,該方法并不適用。深空相位參考VLBI中,現有比較成功的干涉相時延解模糊方法包括多頻率綜合[11-12]、多干涉基線長短組合等[13]。不具備多頻率綜合、多基線組合條件下,輔助利用干涉群時延,也可以解算弧段內干涉相時延模糊度[14]:
τ(t)=φ(t)/2πf+
E[τgroup(t)-φ(t)/2πf]-τerror
(1)
式中:τgroup(t)為群時延;φ(t)為干涉相位;f為干涉頻率。

令:
如果F<0.5(工程中要求0.25),則說明弧段間干涉相時延模糊度為2πN。弧段2開始的真實干涉相位為:
φ(t2start)real=φ(t2start)-2πN
(2)
如果F>0.5(工程中要求0.25),則說明弧段間干涉相時延無法解模糊。
由于相時延測量可以降低射電源和探測器低信噪比帶來的熱噪聲誤差,相位參考VLBI技術利用了這一技術優勢來提高測角精度。需要說明的是,利用相時延代替群時延的射電源觀測,其熱噪聲信噪比提高程度并不和干涉帶寬線性成正比。這源于ΔDOR觀測和相位參考時,選擇的射電源強度差異、干涉相位對接收設備相位不穩定性的敏感等。譬如ΔDOR觀測時,干涉相位噪聲可以達到0.126 rad(相當于1/50周),而相位參考觀測時,干涉相位噪聲預計為0.628~0.314 rad(相當于1/10~1/20周)。
1.2 誤差分析
結合中國深空測控站參數、深空探測器設計參數,對相位參考VLBI測量條件下干涉基線誤差、電離層延遲誤差、對流層延遲誤差及熱噪聲測量誤差等進行分析建模,評估預期測量精度。
(1)干涉基線誤差
由于干涉測量是以基于信號到達地面兩測站的時間差為測量值,因此測站位置和地球定向的不確定性將會影響測量值的誤差水平。根據中國深空站站址標定工作進度,預期深空站站址精度將達到10 cm。因此,由于測站位置和地球定向的不確定性而引入的測站測量誤差可以以0.1m為基準值,因此由基線誤差引入的SBI測量誤差為[8]:
εbaseline=0.1×Δθ
(3)
式中:Δθ為兩航天器間夾角(rad)。因此,假設相位參考VLBI觀測角距為3°,則干涉基線誤差貢獻的測量誤差約為0.005 m。
(2)電離層誤差
電離層是一種色散介質,其所造成的路徑延遲與頻率的平方成反比,利用雙頻時延測量值校準可將電離層誤差降至1/2~1/5。SBI測量中,電離層延遲誤差為[15]:
(4)

中國深空站電離層誤差根據GPS測量值來校準。根據實測值,X波段電離層天頂延遲最大值約為0.2 m。考慮GPS校準水平,電離層天頂延遲誤差取其1/3,約為0.07 m;如果兩航天器間夾角為仰角方向,用于GPS校準的映射函數導數最大為3.5/rad,可以取更保守的4/rad作為典型值。因此,假設相位參考VLBI觀測角距為3°,則電離層延遲誤差貢獻的測量誤差約為0.018 m。
(3)對流層誤差
對流層延遲包括干燥氣體引起的干延遲和水汽引起的濕延遲,是干涉測量的主要誤差源。天頂方向對流層延遲約2~3 m,俯仰角10°時對流層延遲將增加至約20m。SBI測量中,對流層延遲誤差為[8]:
(5)
上述誤差估計公式是基于傳統對流層天頂延遲和映射函數獨立建模。根據項目組建立的對流層延遲混合模型,深空站觀測方向(仰角≥10°)的對流層延遲預報值與實測值之間差異不超過0.25 m,其以仰角為因子的導數通常不超過5 m/rad[16]。因此,假設相位參考VLBI觀測角距為3°,則對流層延遲誤差貢獻的測量誤差約為0.092 m。
(4)測量熱噪聲
相位參考VLBI測量熱噪聲誤差為[8]:
(6)
根據工程經驗,群時延干涉相位提取精度可以達到1/50周。而受不同因素影響,相時延干涉相位預期提取精度為1/10~1/20周。如相時延干涉相位提取精度為1/20周時,X波段(8.45 GHz)相時延測量噪聲水平約為0.002 m。
綜上所述,考慮基線誤差、電離層延遲誤差、對流層延遲誤差以及熱噪聲測量誤差,X波段(8.45 GHz)相位參考VLBI預期測量誤差約為0.094 m(0.31 ns)。
2 相位參考VLBI試驗
2.1 射電源對描述
根據相位參考VLBI對觀測角距的要求,以3°為臨界角距,在所有備選射電源對中,考慮射電源對中較小的流量密度較大的原則,選擇1633+38和1641+399為待觀測射電源對。具體參數如表1所示。
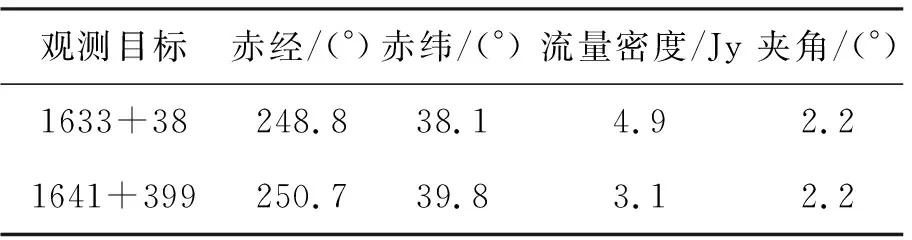
表1 相位參考VLBI觀測射電源對
2.2 試驗驗證與分析
利用中國深空網佳木斯深空站與喀什深空站,開展了兩次針對射電源對的差分干涉測量。
試驗時間:
1)試驗I,2016年7月16日,UTC時間16:20:00~18:30:00
2)試驗II,2016年7月17日,UTC時間16:15:00~18:25:00
試驗過程:跟蹤1641+399半小時,之后交替跟蹤1633+38和1641+399,每次9 min,間隔1 min。
試驗完成后,對原始數據進行干涉相關處理。基于射電源星歷,得到干涉時延模型;佳木斯深空站與喀什深空站原始數據干涉相關處理,解算殘余干涉時延,包括殘余群時延與殘余相時延(含模糊度)。根據式(1)、式(2)中干涉時延解算算法,進一步得到觀測目標群時延輔助的相時延和相位參考時延。
經過原始數據相關干涉處理、群時延輔助相時延處理與相位參考處理,干涉試驗結果分別如圖1和圖2所示,其中圓圈、叉號、點號分別表示射電源1641+399的干涉群時延、群時延輔助的相時延、相位參考時延,方框、十字、星號分別表示射電源1633+38干涉群時延、群時延輔助的相時延、相位參考時延。可以看出,相對群時延,群時延輔助的相時延和相位參考時延均有較小的隨機誤差;然而每個觀測弧段,群時延輔助的相時延絕對值將明顯受群時延影響而波動。
由于干涉模型中包含了射電源星歷解算得到的幾何時延,因此殘余時延體現了射電源各自觀測時的介質時延、設備時延與鐘差等系統性誤差。不同射電源觀測得到的系統性誤差之間的差異表征了VLBI測量誤差。試驗I和試驗II中,基于群時延、群時延輔助的相時延、相位參考時延得到的VLBI測量誤差(有效值RMS和最大值MAX)如表2所示。

表2 群時延、群時延輔助相時延、相位參考時延誤差
上述結果初步表明,基于小角距的差分干涉測量群時延誤差小于1.0 ns(RMS)。引入群時延輔助相時延方法、消除干涉相時延模糊度后,時延測量誤差小于0.2 ns(RMS),最大不超過0.5 ns。而相位參考時延測量誤差小于0.1 ns(RMS),最大約0.1 ns。
3 結束語
本文介紹了相位參考VLBI原理,以及弧段內干涉相時延解模糊方法,闡述了弧段之間相互參考解算干涉相時延模糊度流程。考慮干涉基線誤差、對流層與電離層延遲誤差以及觀測熱噪聲,完成了測量誤差分析。最后利用中國佳木斯深空站、喀什深空站針對射電源對1 633+38和1 641+399開展了相位參考VLBI試驗驗證。兩次差分干涉測量試驗結果表明,小角距條件下群時延、群時延輔助的相時延、相位參考時延的測量誤差分別小于1.0 ns、0.2 ns、0.1 ns。
該高精度干涉時延測量結果為提高中國未來深空探測器角位置精度提供了一種可行的技術途徑,后續將開展以探測器為待測源的“探測器-射電源”相位參考VLBI試驗驗證。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00