航天器大功率并網控制技術研究
2019-01-21 08:22:14,,,,,*
中國空間科學技術 2018年6期
,,,,,*
1. 北京衛星制造廠有限公司,北京 100080 2. 北京市空間電源變換與控制工程研究中心,北京 100080
航天器之間并網供電控制技術是中國空間站建設需突破的關鍵技術。國際空間站在節點艙配置了恒壓變換器RACU(Russian-to-American Converter Unit)和ARCU(American-to-Russian Converter Unit),用于美國軌道艙與俄羅斯功能艙之間并網供電,供電模式為功率不可調節的恒壓模式,功率不超過1 kW[1-2]。在中國載人航天工程第二階段,利用天宮一號目標飛行器和神舟八號載人飛船開展了500W功率不可調節的并網供電試驗,初步驗證了并網供電控制技術的合理性[3-4]。目前我國載人航天工程處于空間站建設第三階段。空間站由核心艙與兩個實驗艙在軌交會對接組成,與來訪貨運飛船和載人飛船交會對接形成更為復雜的組合體。與第二階段相比,空間站的復雜度和功率量級顯著提高,功率由2 kW提高到10 kW。在陽照期間,空間站組合體之間存在的陽光遮擋效應會導致部分艙段和飛船供電能力不足。為了解決這一問題并充分發揮空間站能源系統整體效率,在借鑒國際空間站和我國載人航天第二階段成功經驗的基礎上,提出了配置能源管理計算機和大功率并網控制器(PSC)的并網控制技術方案,以滿足并網功率不低于4 kW、具備恒壓和恒流兩種工作模式以及通過1 553B總線進行功率調節的并網供電需求。能源管理計算機實時監測各艙段發電能力并分析負載功率需求,根據分析結果確定并網控制器輸出功率。可見空間站無論從并網功率量級,還是從供電模式和調節控制等方面,均對并網供電控制提出了更高要求。本文通過大功率并網供電控制技術研究,對并網控制器的電路拓撲、熱設計、并聯均流和控制電路進行了優化,可以滿足我國空間站、載人登月以及深空探測等組合體航天器的并網供電控制需求。
1 并網控制方案
空間站能源管理計算機通過1 553B總線指令對并網控制器的輸出電流或電壓進行設置,實現并網控制器并網能力(最大輸出電流)以及輸出電壓調節。并網控制器設計需考慮輸出功率、恒壓和恒流輸出模式、輸出電壓和輸出電流調節范圍,以及針對輸入母線和負載的保護功能。
為了實現并網控制器的標準化和模塊化設計,將功率擴展到20 kW以上,以滿足未來我國航天器更大功率的并網供電需求,同時考慮到現有功率器件的性能水平及熱設計難度,將并網控制器變換器單元(CU)的額定功率設置為2 kW,并具有自動并聯均流功能以及數字調節功能。
根據上述方案,針對空間站功率、故障模式和可靠度需求,并網控制器配置了3個變換器單元,其中2個用以滿足4 kW功率需求,另1個作為冗余備份以提高可靠度并消除單點故障模式。正常情況下,整機最大功率為2×(2+1) kW=6 kW。假設并網需求功率為2nkW,則至少需配置n個單元,再根據整機可靠度指標要求,確定冗余備份單元數量m,則最大輸出功率為2(n+m) kW。并網控制器整機組成框圖見圖1。
圖1中測控單元1和2互為備份,實現對變換器單元的輸出電壓和電流調節、參數和狀態采集,并對外進行1 553B總線通信。串聯在輸出母線的隔離開關通常為大功率繼電器或接觸器,用于并網供電的接通和斷開控制。
為了避免或降低并網供電接入時對并網母線帶來的沖擊,在并網供電接入前,并網控制器利用并網母線電壓檢測和輸出電壓調節功能,首先將其輸出電壓調節到與并網母線電壓相等,再控制隔離開關閉合,可實現并網控制器平穩接入并網母線。由于正常并網供電時,并網控制器處于恒流輸出模式,并網母線電壓基本保持不變,因此并網輸出電流與輸出功率成正比,即通過調節輸出電流可實現對輸出功率的調節。
1.1 變換器單元拓撲
根據參考文獻[5-9]提出的功率變換電路拓撲,同時為了進一步降低輸出整流和續流肖特基二極管的熱耗,變換器單元采用輸入并聯、輸出串聯四相雙管正激功率電路拓撲。該拓撲可大幅降低作為開關管的功率器件金屬氧化物場效應晶體管(Metal-Oxide-Semiconductor Field-Effect Transistor,MOSFET )以及作為整流和續流管的肖特基二極管的電壓應力,并降低熱耗和溫升。變換器單元功率電路拓撲見圖2。
功率變換電路拓撲采用四相90°交錯脈沖寬度調制(Pulse Width Modulation,PWM)控制,開關管工作在交錯移相狀態,輸入輸出濾波器工作于4倍頻模式,可有效降低輸入和輸出電壓、輸入和輸出電流的脈動幅度,并可減小變壓器和濾波器的體積和質量。四相驅動信號時序見圖3,Ts為四相周期,每相占空比為25%~50%,時序相鄰兩相驅動信號起始時間間隔為1/4Ts。
1.2 變換器單元閉環控制
變換器單元的閉環控制調節器原理見圖4。
依據文獻[10-13]提出的閉環控制參數設計方法,變換器單元的閉環控制使用了電壓和電流比例積分調節器,分別對應恒壓和恒流模式的負反饋閉環控制。調節器輸出經過二極管或邏輯送至PWM控制芯片,對變換器單元的輸出電壓和輸出電流進行閉環控制,使并聯的變換器單元均處于恒壓或恒流工作模式,確保并網控制器無論是單獨恒壓帶載,還是恒流并網供電,均能提供穩定的供電輸出。
圖4中Ioref為變換器單元的電流基準,即對應恒流模式的輸出電流設置指令值,Ios為變換器單元恒流模式實際輸出電流采樣值。Voref為變換器單元的電壓基準,即對應恒壓模式的輸出電壓設置指令值,Vos為變換器單元恒壓模式實際輸出電壓采樣值。U1為恒流模式輸出電流閉環控制誤差放大器,U2為恒壓模式輸出電壓閉環控制誤差放大器。
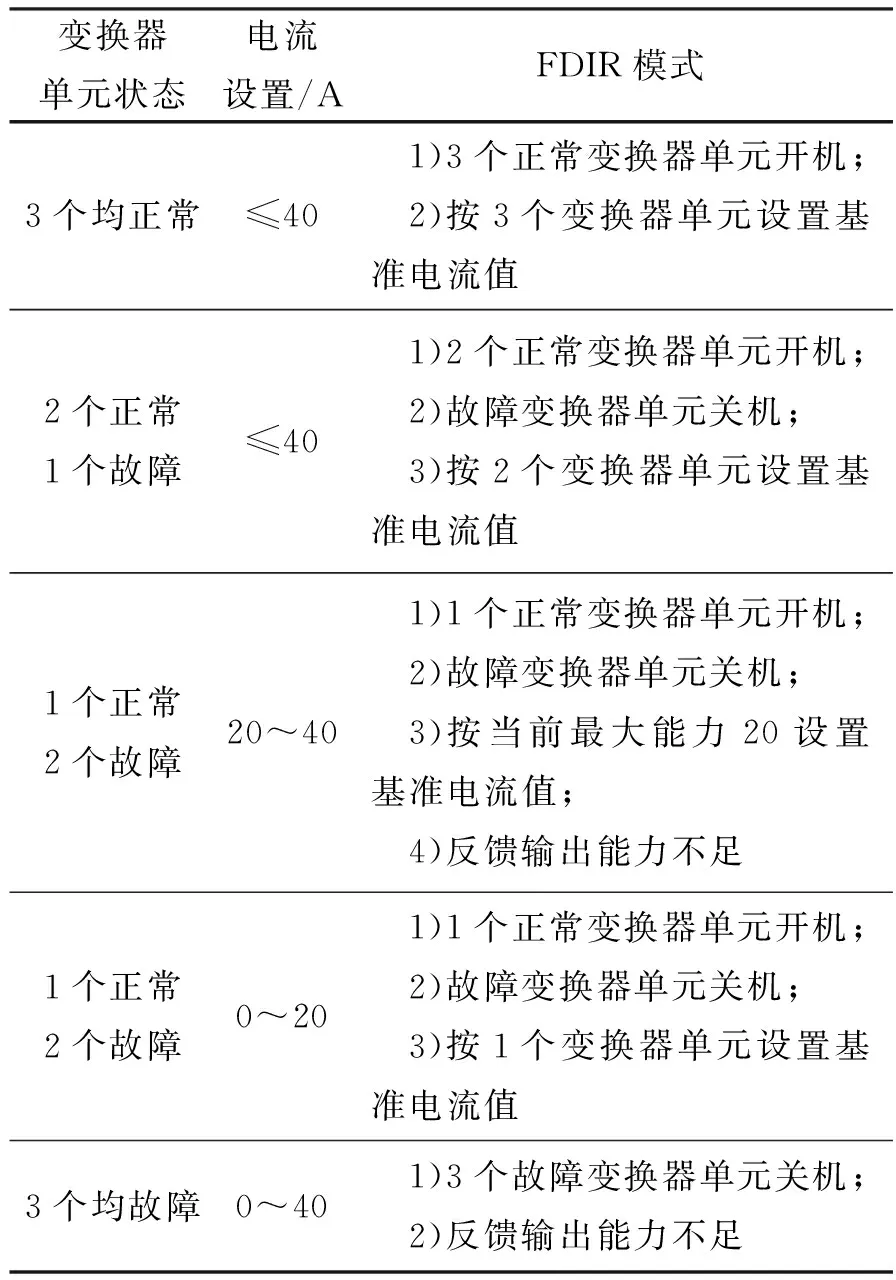
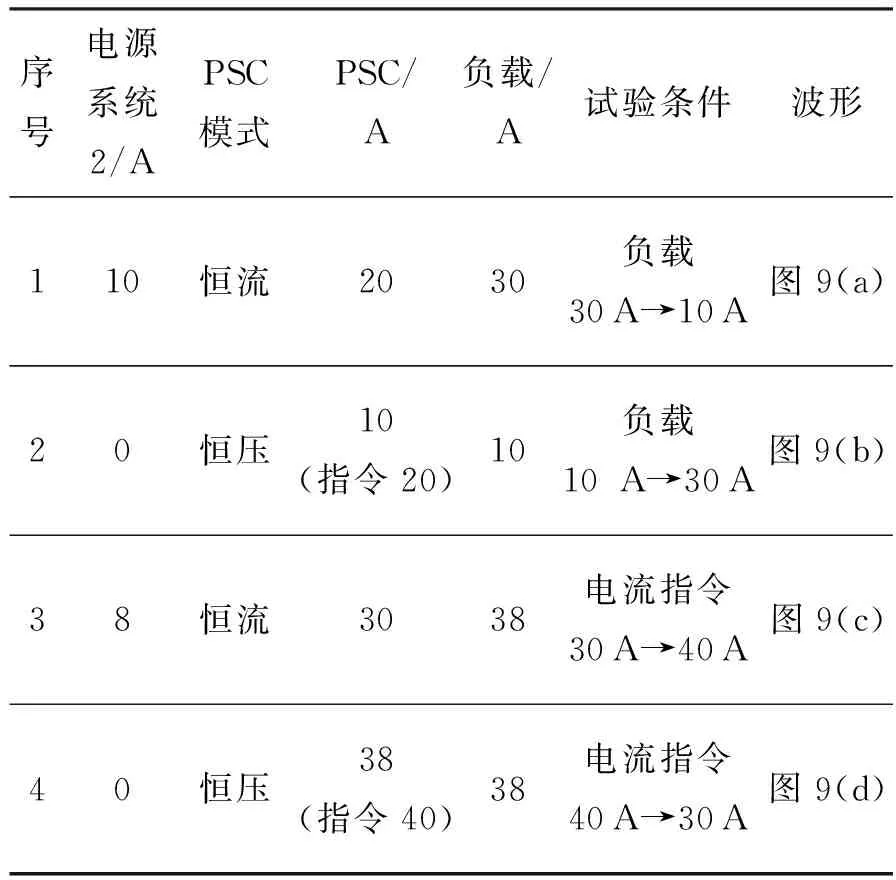
變換器單元的閉環控制電路工作在負反饋閉環調節狀態,當Ios 針對負載變化和電流設置指令變化引起的工作模式變化,結合功率電路拓撲結構,通過優化圖4中電流調節器R1、R2、C1和電壓調節器R4、R5、C2,可調節并網控制器工作模式變化過程的動態特性[14],確保對供電電源系統和負載無影響。 DC/DC變換器并聯應用可以擴展輸出功率,但需要采用并聯均流控制技術,以均衡并聯變換器的輸出電流。并聯均流控制技術主要有主從均流法和民主均流法兩大類。由于主從均流法需要設定主變換器,并且當主變換器故障時,并聯的從變換器無法實現并聯均流,因此主從均流法無法滿足并網控制器冗余備份要求。民主均流法主要有平均電流法和最大電流法。通過對并聯變換器公共均流母線的故障模式及影響進行分析,選用不存在單點故障模式的最大電流法,以確保變換器單元并聯可靠性。 最大電流民主均流法自動設定主變換器,即并聯變換器中輸出電流最大者自動成為主變換器,其余則為從變換器。主變換器的輸出電流信號最大,通過隔離二極管自動獲得對均流母線的控制權而成為均流母線信號。各變換器單元實時比較各自的輸出電流與均流母線信號,并自動對各自輸出電壓進行負反饋閉環調節,進而實現對輸出電流的均流調節,使得并聯變換器單元的輸出電流滿足均流精度要求。最大電流民主均流法并聯均流控制原理框圖見圖5。圖5中Io1、Io2、…、IoN分別為變換器1~N的輸出電流,Io_BUS為均流母線信號。 并網控制器通過1 553B總線控制芯片接收并網供電輸出電壓和電流控制指令。運行于測控單元中的軟件對指令進行有效性判斷和解析,對于有效指令,軟件通過控制微處理器(Micro Processor Unit,CPU)的地址總線和數據總線,將指令數據送給數/模轉換器,鎖存后形成變換器單元的基準電壓或電流信號,實現對變換器單元輸出電壓或電流的調節,即實現對并網控制器的輸出電壓或者輸出電流調節[15-16]。由于在并網控制器并網供電時的并網母線電壓基本保持不變,因此調節并網控制器輸出電流即對應調節并網控制器輸出功率。并網控制器測控單元原理框圖見圖6。 航天器中單機產品典型環境條件為真空,由于輻射散熱通常不超過散熱總量的10%,因此在進行并網控制器熱設計時,主要考慮傳導散熱措施。 變換器單元高熱耗功率器件主要有原邊開關管MOSFET以及副邊整流和續流二極管,為了盡可能減小功率器件與單機安裝面的熱阻,將功率器件布局在變換器單元底部內表面,功率器件布局見圖7。利用FLOTHERM軟件建立了熱仿真模型,將作為熱邊界的安裝面設置為最高溫度60℃。變換器單元在額定2 kW輸出時,功率器件的熱耗及仿真溫度見表1。額定工況下實際測試表明,功率器件殼溫均未超過仿真溫度,最大誤差為4℃。 器件代號器件名稱熱耗/W殼溫/℃結溫/℃Q1~Q8MOSTET6.768.772.7D9、D11、D13、D15整流肖特基二極管8.276.281.4D10、D12、D14、D16續流肖特基二極管11.882.486.3 根據并網控制器故障模式及影響分析結果,針對故障情況下對輸入母線和負載的可能影響,變換器單元設計了相應的保護功能。對輸入母線的保護功能包括輸入過壓保護、輸入欠壓保護和輸入過流保護,對負載的保護功能包括輸出過壓保護、輸出過流保護,另外還設計了確保自身安全的過熱保護。 當并網控制器中變換器單元的工作狀態滿足上述某種保護功能的觸發條件時,相應保護功能會發揮作用,可避免變換器單元中功率器件出現過電應力或熱應力而失效,也可避免影響輸入母線或負載,同時停止異常變換器單元輸出,并自動斷開其與輸出母線的電氣連接。為了在變換器單元或測控單元發生故障時,并網控制器仍然能夠完成規定的任務,變換器單元和測控單元均進行了冗余備份設計。 變換器單元的輸出均配置MOSFET作為隔離開關。當某個變換器單元出現故障,保護功能會自動使MOSFET隔離開關斷開,將故障變換器單元與正常變換器單元和輸出母線隔離,同時,異常變換器單元的狀態標志會發生變化,并通過測控單元經1 553B總線輸出。 測控單元實時檢測并網控制器的輸出電壓、電流和變換器單元的狀態標志,并與當前的電流設置指令值進行比較。當檢測到變換器單元出現異常時,測控單元軟件根據變換器單元當前狀態標志,自動調整電流指令設置值,實現故障恢復,并保持輸出電壓和電流不變。針對并網控制器當前的電流指令和變換器單元的不同故障狀態,空間站4 kW并網控制器FDIR模式見表2。 表2并網控制器FDIR模式 Table 2 PSC FDIR mode 變換器單元狀態電流設置/AFDIR模式3個均正常≤401)3個正常變換器單元開機;2)按3個變換器單元設置基準電流值2個正常1個故障≤401)2個正常變換器單元開機;2)故障變換器單元關機;3)按2個變換器單元設置基準電流值1個正常2個故障20~401)1個正常變換器單元開機;2)故障變換器單元關機;3)按當前最大能力20設置基準電流值;4)反饋輸出能力不足1個正常2個故障0~201)1個正常變換器單元開機;2)故障變換器單元關機;3)按1個變換器單元設置基準電流值3個均故障0~401)3個故障變換器單元關機;2)反饋輸出能力不足 通過開展并網控制器與電源系統并網供電聯試試驗,驗證了利用并網控制器為多艙段航天器組合體能源不足艙段進行并網供電方案的正確性和合理性。并網供電聯試試驗系統由電源系統設備、并網控制器和模擬負載等組成,聯試試驗系統組成見圖8。 針對并網控制器的工作模式與電流指令和負載變化之間的關系,進行了穩態和瞬態特性分析,基于分析結果確定了試驗方案并開展了并網供電聯試試驗,試驗典型工況見表3。 表3 并網供電聯試試驗典型工況 圖9為對應負載和電流指令變化時,并網控制器模式轉換過程中并網母線電壓和輸入輸出電流波形。其中,并網母線電壓波形對應圖8中A點,并網控制器輸入電流波形對應圖8中I1,并網控制器輸出電流波形對應圖8中I2。從動態波形可以看出,負載變化和電流指令變化均會導致并網控制器由恒流模式轉換到恒壓模式的電壓超調不超過2%,優于不超過5%指標要求。 本文針對中國空間站及將來更大功率并網供電需求,研究了高壓大功率并網供電關鍵技術,并研制了并網控制器單機。結合單機測試和并網供電聯試試驗,可得出以下結論: 1) 利用本文并網供電關鍵技術研制的并網控制器可實現多艙段航天器電源系統并網供電控制; 2)與國際空間站相比,并網控制器可通過1 553B總線控制,功率更大并且具有供電功率數字調節功能; 3) 基本單元模塊化設計便于功率擴展,以滿足更大功率需求; 4) 并網控制器具有安全可靠、工作模式轉換過程平穩及輸出電壓超調小等特點; 5) 適用于空間站工程、載人登月及深空探測等組合體航天器并網供電。1.3 變換器單元并聯均流
1.4 變換器單元輸出調節
1.5 功率器件熱設計

1.6 故障保護設計
2 并網供電聯試試驗
3 結束語