淺析側掃聲納在水下搜尋救助作業中的應用
2019-01-22 04:37:30楊偉光
珠江水運 2019年21期
楊偉光
摘 要:本文通過對南海救助局廣州救助基地裝備的Klein5000v2進行的兩例救助案例進行分析,結合案例討論側掃聲納與潛水員協同完成落水目標搜尋的方法。可以為今后水下搜尋救助作業提供參考。
關鍵詞:側掃聲納 救助 打撈
側掃聲納廣泛應用于地質調查、礦物勘探、海洋工程勘探、探測水雷、等領域。作為一種新型的搜尋救助手段,能夠有效彌補傳統潛水救助中對于水下目標搜索和定位手段的不足,提高了水下應急處置和救助能力。
1.設備介紹
1.1側掃聲納
側掃聲吶是一種主動聲吶系統,側掃聲吶原理是向測量船航向的垂直方向一側或兩側發射一個水平開角很小(約1度左右),垂直開角很大的短聲波脈沖,脈沖到達海底后,根據海底距換能器的遠近,被不斷反射,并按反射信號的強弱程度畫出灰度變化不均的聲吶圖像,從聲吶圖像中可以觀察出海底地貌變化,是否有地形突起和海底目標。
南海救助局廣州救助基地裝備的側掃聲納為Klein5000V2側掃聲納,該聲納是多個波束動態聚焦的側掃聲納系統,單側有5個波束,單側最大量程150m,最大工作水深500m,拖魚直徑15.2cm,長194cm,重70kg;作業航速2-10kn。脈沖類型(CW/FM),頻率455Khz。
1.2側掃聲納發現物體的能力
一般認為,有2個以上的波束打到物體上,才能夠在聲納圖像上形成明顯的成像。根據側掃聲納的工作原理,一個聲波脈沖的時間為:
(1)
其中:R為聲納系統采集的距離最遠的聲波反射距離,即聲納系統選擇的量程。C為水中聲速,一般取1500m/s作為近似值。Tp為一個聲波脈沖往返所需要的時間。
在一個聲波脈沖時間中,拖魚走過的距離即為兩個聲波脈沖之間的距離,此距離為:
(2)
其中:D為兩個聲波脈沖之間的距離。VS為拖曳速度,近似為拖曳母船速度。V
打到目標物上的聲波數量為:
(3)
其中,L為搜尋的目標沿拖魚前進方向的長度,N為打到目標物上的聲波數量。
綜合(1)、(2)、(3)式可以得出:
(4)
由于C為水中聲音傳播的速度,L跟落水目標的大小和形狀有關,并非可以人為控制的因素。在能夠保持拖魚姿態穩定的前提下,控制船速處于更低的速度,選擇更小的聲納測量量程,有利于發現小目標,但是會降低搜尋的效率,反之亦然。
1.3GPS信標機
如圖2所示,Trimble SPS 351信標接收機通過外置GPS天線獲取位置信息。室內接收機自帶屏幕,可以顯示天線所在位置的經緯度信息,連接至聲納圖像處理工作站可以同時為聲納數據提供位置信息。在開啟碼差分GPS定位時,其水平定位精度為0.25mm,未開啟碼差分GPS定位時,其水平定位精度為1m。
2.傳統水下目標搜尋方式
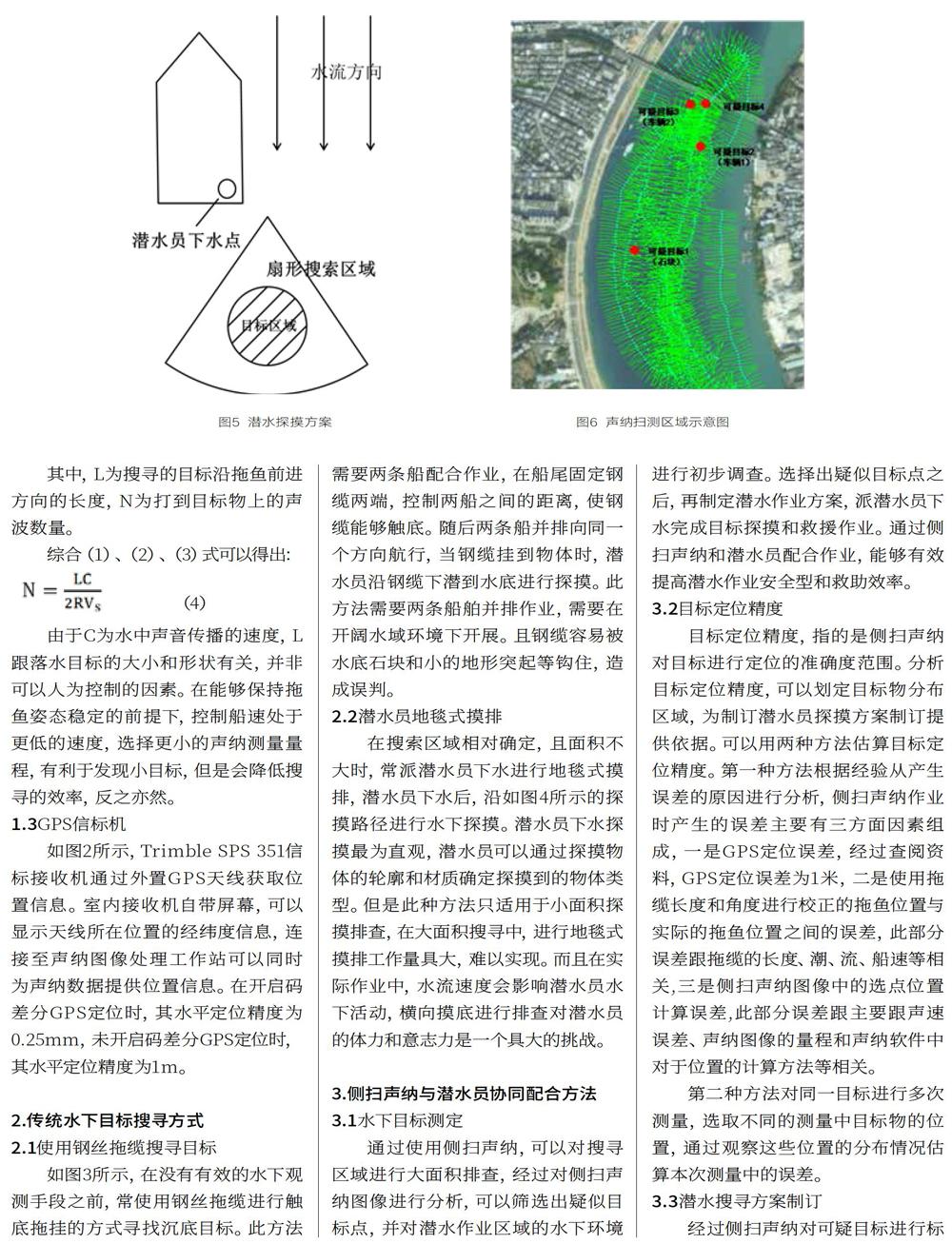
2.1使用鋼絲拖纜搜尋目標
如圖3所示,在沒有有效的水下觀測手段之前,常使用鋼絲拖纜進行觸底拖掛的方式尋找沉底目標。此方法需要兩條船配合作業,在船尾固定鋼纜兩端,控制兩船之間的距離,使鋼纜能夠觸底。隨后兩條船并排向同一個方向航行,當鋼纜掛到物體時,潛水員沿鋼纜下潛到水底進行探摸。此方法需要兩條船舶并排作業,需要在開闊水域環境下開展。且鋼纜容易被水底石塊和小的地形突起等鉤住,造成誤判。
2.2潛水員地毯式摸排
在搜索區域相對確定,且面積不大時,常派潛水員下水進行地毯式摸排,潛水員下水后,沿如圖4所示的探摸路徑進行水下探摸。潛水員下水探摸最為直觀,潛水員可以通過探摸物體的輪廓和材質確定探摸到的物體類型。但是此種方法只適用于小面積探摸排查,在大面積搜尋中,進行地毯式摸排工作量具大,難以實現。而且在實際作業中,水流速度會影響潛水員水下活動,橫向摸底進行排查對潛水員的體力和意志力是一個具大的挑戰。
3.側掃聲納與潛水員協同配合方法
3.1水下目標測定
通過使用側掃聲納,可以對搜尋區域進行大面積排查,經過對側掃聲納圖像進行分析,可以篩選出疑似目標點,并對潛水作業區域的水下環境進行初步調查。選擇出疑似目標點之后,再制定潛水作業方案,派潛水員下水完成目標探摸和救援作業。通過側掃聲納和潛水員配合作業,能夠有效提高潛水作業安全型和救助效率。
3.2目標定位精度
目標定位精度,指的是側掃聲納對目標進行定位的準確度范圍。分析目標定位精度,可以劃定目標物分布區域,為制訂潛水員探摸方案制訂提供依據。可以用兩種方法估算目標定位精度。第一種方法根據經驗從產生誤差的原因進行分析,側掃聲納作業時產生的誤差主要有三方面因素組成,一是GPS定位誤差,經過查閱資料,GPS定位誤差為1米,二是使用拖纜長度和角度進行校正的拖魚位置與實際的拖魚位置之間的誤差,此部分誤差跟拖纜的長度、潮、流、船速等相關,三是側掃聲納圖像中的選點位置計算誤差,此部分誤差跟主要跟聲速誤差、聲納圖像的量程和聲納軟件中對于位置的計算方法等相關。
第二種方法對同一目標進行多次測量,選取不同的測量中目標物的位置,通過觀察這些位置的分布情況估算本次測量中的誤差。
3.3潛水搜尋方案制訂
經過側掃聲納對可疑目標進行標注之后,即可制定潛水搜尋方案。搜尋方案應該設置入水點、劃定一個區域,此區域大小應該根據側掃聲納目標定位精度設置,并且方便潛水員作業。如圖5所示,潛水員探摸的扇形區域應覆蓋目標區域。劃定區域之后,根據水流方向、目標所在點的經緯度位置、計算得到合適的潛水員下水點坐標。將GPS天線放置于潛水員下水點,操縱船舶,使潛水員入水點剛好位于搜索區域上游位置,隨后潛水員下水,沿扇形區域進行地毯式摸排。
4.案例分析
4.1某橋斷裂汽車落水搜尋救助
由于某橋斷裂造成2輛車輛落水,車上1人獲救,2人失蹤。掉落兩輛車輛,該區域河道寬約200米,水深4-12米,搜救現場水流速度約2m/s,橋墩下游水流由于橋墩阻擋,水流湍急。
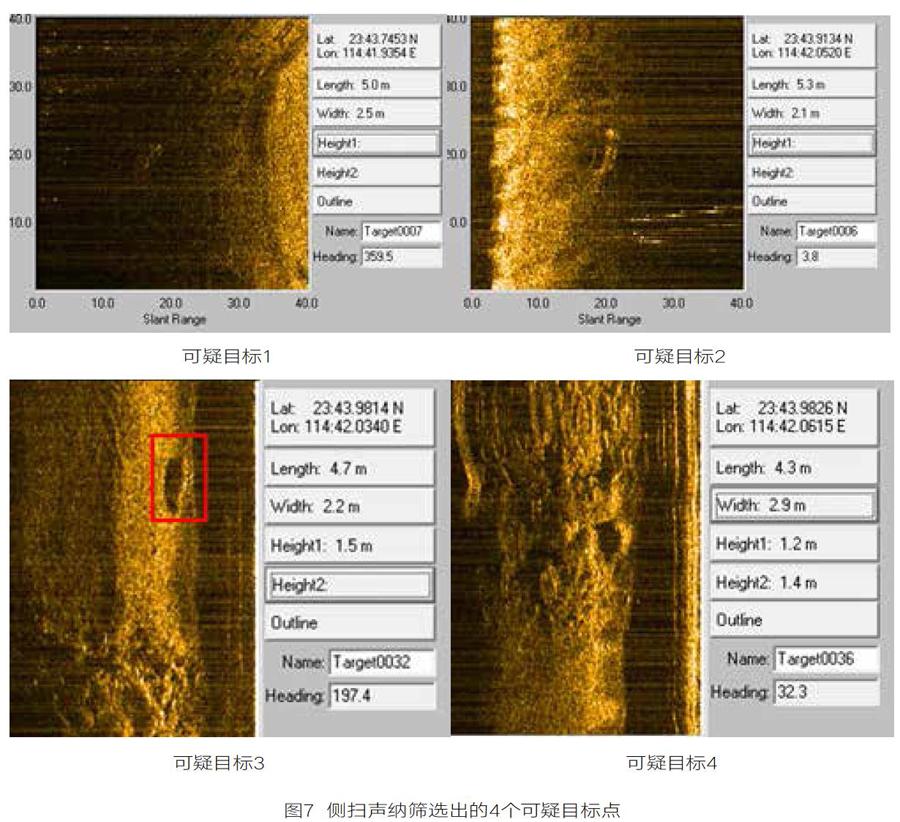
根據現場環境、事發時的監控視頻以及幸存者對事發時車輛落水情況的描述。使用側掃聲納對橋梁下游約1公里范圍進行了掃測作業,經過3小時的掃測作業,完成測線長度約約17公里,共計約0.3平方公里水域的掃測(圖6),測量過程中船速控制在2.5-3.5節。經過對聲納圖像進行分析,共發現可疑目標4個(圖7),按照順序,分別對四個目標進行了排查。其中目標1經確認為大小與車輛近似的石塊,目標2和目標3為車輛,由于事發落水的兩輛車輛全部找到,未對目標4進行探摸排查。
在現場使用傳統鋼絲拖纜搜尋目標過程中,鋼纜掛到可疑目標2,潛水員順鋼纜進行探摸,順利完成了目標2車輛的探摸和打撈。由于可疑目標3距離橋墩較近,無法使用鋼絲拖纜對可疑目標3進行排查。根據聲納圖像定位誤差產生的原因估算,目標物的定位誤差小于5米。所以在船舶定位之后,劃定了半徑為10米的扇形搜索區域。由于水流速度太快,在船首部,使用兩根繩子分別連接到岸邊石欄和斷裂的橋墩,使船舶準確定位在扇形搜索區域頂點的上游。經過潛水員下水摸排,順利實現了對目標3車輛的探摸和打撈。
4.2珠江某掉落船錨搜尋打撈
相比應急救援任務,掉落船錨打撈任務時間更加充裕。在珠江某水域,使用側掃聲納與潛水員協同作業的方法,完成了對落水船錨的打撈任務。通過側掃聲納掃測作業,在聲納圖像上3次獲取該錨鏈的位置,3個位置之間最大間距為6.5m。劃定包含了3個位置的探摸區域之后,潛水員下水,順利完成了對該錨鏈的探摸和打撈。
5.總結
隨著救助能力轉型升級,各種新的科技手段不斷的在救助任務中得到應用。通過側掃聲納的使用,可以實現對水下目標的定位。對聲納圖像中的目標形狀和尺寸進行篩選,得到的疑似目標有較大的可信度,可以有效提高救助效率和成功率。實際案例證明,在未知風險較多的水下作業中,通過事先對搜尋目標進行聲吶成像,通過科學地制定水下探摸方案,可以有效降低潛水員作業風險,提高救助成功概率。
【基金項目:國家重點研發計劃(2017YFC0306003)】
參考文獻:
[1]夏維.多脈沖側掃聲納原理及應用淺析[J].珠江水運,2014(15):75-76.
[2]王志光,孫新軒,劉強,熊傳梁,徐衛明.側掃聲納系統在海底障礙物掃測中的應用[J].海洋測繪,2012,32(06):48-50.
[3]王久,周健.側掃聲納和多波束系統在失事沉船掃測中的綜合應用[J].中國水運(下半月刊),2010,10(08):35-37.