
電力機車試驗線平衡供電系統
2019-01-28 10:21:00呂順凱
科技創新與應用 2019年2期
關鍵詞:控制策略
呂順凱


摘 要:電力機車為大功率單相負載,其試驗線25kV供電電源經由10kV單相變升壓獲取,試驗時經常造成10kV三相進線側嚴重不平衡,導致過流保護跳閘。文章提出了一種用于電力試驗線的平衡供電系統方案,介紹了系統拓撲結構和工作原理,探討了系統控制及保護邏輯,并通過仿真,驗證了系統方案及控制策略的可行性和優越性。該平衡供電系統構成簡潔,控制策略新型,性能優良,能夠實現10kV進線側三相平衡,顯著減小線路電流幅值,充分保障試驗線路供電可靠性。
關鍵詞:電力機車;試驗線;不平衡;控制策略
中圖分類號:TM922.3 文獻標志碼:A 文章編號:2095-2945(2019)02-0001-04
Abstract: Electric locomotive is a high-power single-phase load, its test line 25kV power supply is obtained by 10kV single-phase transformer, the test causes in serious imbalance of the 10kV three-phase line side, resulting in over-current protection tripping. A scheme of balanced power supply system for power test line is presented in this paper. The topological structure and working principle of the system are introduced. The logic of system control and protection is discussed. The feasibility and superiority of the system scheme and control strategy are verified. The balanced power supply system has the advantages of simple structure, new control strategy and excellent performance. It can realize the three-phase balance at the inlet side of the 10kV, significantly reduce the line current amplitude, and fully guarantee the power supply reliability of the test line.
Keywords: electric locomotive; test line; unbalance; control strategy
引言
公共電網屬于三相供電系統,電力機車屬于大功率單相負荷,會導致公共電網三相不平衡[1]。電氣化鐵路采用220kV或者110kV供電,電壓等級高,供電容量大,同時采用分段相序輪換供電,可以有效抑制單相大功率電力機車造成的不良影響[2]。
主機廠用于電力機車靜調和動調考核試驗的試驗線路,通常采用采用普遍存在的交流三相10kV電源供電,通過單相升壓變壓器輸出25kV電壓給電力機車供電,由于10kV系統容量相對較小,供給SS型、HXD型電力機車、CRH型高速動車組等大功率單相不平衡負載時,造成的負序會影響同線供電敏感負荷的正常用電,而且容易出現不平衡負荷或者單相過載引起的上級變壓器跳閘故障,影響供電系統安全、可靠運行[3]。
為了保證電力機車出廠動調試驗正常運行,往往只是采取同線負載臨時限電,增大上級變壓器容量的措施。為解決試驗線路供電問題,株洲電力機車研究所有限公司曾為某主機廠的牽引變電所設計了一種用于提升單相牽引供電能力、改善三相負荷平衡的TSC+TSR型三相動態平衡補償裝置,該TSC+TSR型動態平衡補償系統投切級數可達28級,基本上能達到無級調節的效果,且投入涌流及關斷過電壓都較小,效果較好,但是系統結構及控制策略復雜,投資高,占地面積大[4-5]。
基于現已成熟應用的大功率變流器模塊及四象限變流技術[6],本文提出了一種新型的電力機車試驗線平衡供電系統設計方案,介紹了系統構成、工作原理、控制方法及保護邏輯,并通過仿真驗證了應用效果。該系統及控制策略能夠實現進線側三相平衡供電,消除負序影響,保證試驗線路供電質量,充分發揮供電系統的能力,同時具有占地面積小、損耗低等優勢。
1 平衡供電系統構成
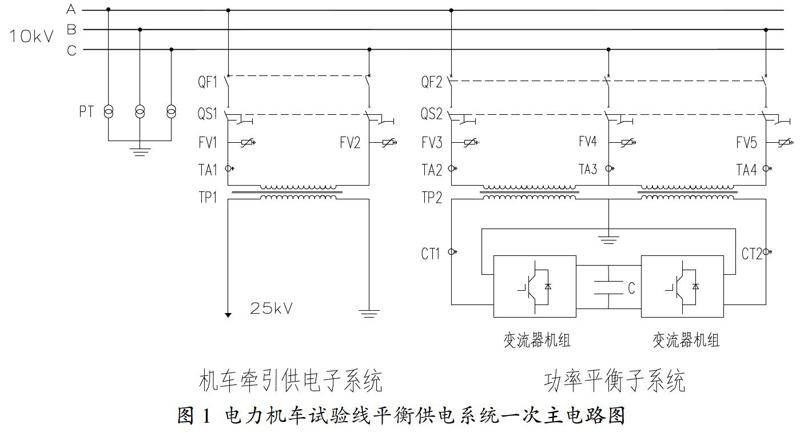
圖1為平衡供電系統一次主電路圖,按照功能劃分,包含兩個子系統:機車牽引供電子系統和功率平衡子系統。機車牽引供電子系統將10kV單相線電壓轉換為機車額定牽引供電電壓25kV,滿足電力機車動調電能需求。功率平衡子系統檢測機車牽引子系統的電流,通過控制變流器機組的有功融通及無功輸出,實現10kV進線側三相電流平衡,顯著減小10kV進線電流幅值,消除電力機車單相牽引供電導致的負序,避免對同線供電負荷造成影響。
平衡供電系統主要設備包含斷路器、隔離開關、避雷器、電流互感器、電壓互感器、變壓器、大功率變流器模塊構成的四象限變流器機組等,詳細設備清單見表1。
2 平衡供電系統工作原理
平衡供電系統原理說明見圖2。第一步,由控制裝置檢測機車供電子系統的電流I1(即圖1中TA1檢測的電流),計算出牽引供電子系統的有功功率P1和無功功率Q1。第二步,功率平衡子系統的變流器機組2向變流器機組1進行有功融通,轉移有功功率P2(功率方向與P1方向相反,大小為P1的1/2);同時變流器1輸出容性無功功率Q2,同時變流器2輸出感性無功功率Q3,使得各相電流與相電壓達到同相位。至此,通過控制兩個變流器機組間的有功融通以及各自的無功輸出,已實現10kV進線側三相輸入電流相等,功率平衡。
3 平衡供電系統控制策略
設定三相進線電壓為額定電壓,變壓器損耗較小,忽略不計,首先以交流傳動機車負荷(功率因數為1)為例進行分析,機車有功功率等于P1,無功功率Q1等于0。為方便分析,以下的電壓電流全部為10kV側等效電流。
機車牽引供電子系統運行時,子系統的電壓電流矢量圖如圖3所示。
控制系統檢測到機車牽引子系統的電流,控制系統使得變流器機組2向變流器機組1進行有功融通,融通功率大小為機車供電系統有功功率的二分之一(10kV側等效為融通電流為二分之一I1),方向為由變流器機組2向變流器機組1;同時變流器1輸出容性無功功率Q2,同時變流器2輸出感性無功功率Q3。
即以各自線電壓為參考,變流器機組1及變流器機組2的視在功率S1和S2分別為:
平衡供電系統10kV進線側總電流:
I1、I2和I4分別為圖1中CT1、CT2和CT4的電流。
功率平衡前后,相電流幅值變化為:
則平衡供電系統能夠顯著減小10kV進線側的電流幅值,變為初始值的57.7%,減小幅值達42.3%。
如果負載為交直型電力機車,只需將變流器機組1的容性無功輸出值增加為機車無功負載Q1與Q2之和即可。
變流器機組1的視在功率為:
變流器機組2的視在功率為:
而且由于平衡供電子系統同時補償了牽引供電子系統的無功電流,則電流10kV進線側的電流幅值減小比例超過42.3%。
4 系統控制及保護邏輯
4.1 控制邏輯
控制裝置實時檢測牽引供電子系統的電流(來自TA1的測量繞組)以及10kV進線側三相母線電壓(來自PT),實時計算系統有功及無功,并將控制命令發送至執行裝置,控制變流器機組1和變流器機組2的有功和無功輸出,同時實時采集變流器機組1的電流(來自CT1的測量繞組)和變流器機組2(來自CT2的測量繞組)的電流,反饋回控制系統進行實時修正,保證進線側三相功率平衡。
同時,控制裝置接收保護裝置以及兩個變流器機組發送的故障信號,當檢測到故障時,停止發送變流器機組1和變流器機組2的控制命令。
4.2 保護邏輯
保護裝置實時檢測10kV母線的電壓(來自PT)和系統各支路10kV側的電流(來自TA1、TA2、TA3、TA4的保護繞組),以及變流器機組1的電流(來自CT1的保護繞組)和變流器機組2的電流(來自CT2的保護繞組),并與保護定值進行比較。
若采集的電流值超過設定值,動作于牽引供電子系統支路斷路器(QF1)和功率平衡子系統支路斷路器(QF2),同時將故障信號發送至控制系統,停止變流器機組1和變流器機組2的輸出。
同時,保護裝置還采集了隔離開關的位置信號,作為合閘允許條件,防止系統檢修時誤合斷路器。
5 仿真驗證
為了證明本文所提出的檢測方法和控制策略的有效性,以直流機車為例,進行了仿真驗證。機車負載用電阻和不可控整流負載并聯來等效,設定接在電力機車變壓器二次側的電阻負載為0.7Ω,不可控整流負載為1Ω電阻串聯一個200mH大電感的阻感負載,用來模擬諧波源,且保證其基波負載功率因數接近1。仿真結果如圖8、9所示。
圖8中IA、IB和IC分別為A、B、C三相電流,可見未應用平衡供電系統之前,由于只有三相進線側只有A相和C相通過變壓器接入機車負載,B相電流為0,這時三相電流中負序電流最大,負序電流與正序電流之比為100%,并且A、C相電流含有一定量的諧波。應用平衡供電系統之后,進線側三相電流達到平衡。圖9中iaL和ia分別為應用平衡供電系統前后網側等效電流,可見采用平衡供電系統之后,網側等效電流諧波含量明顯減少,經測算,電流畸變率從17.2%降低到5%。通過仿真,證明平衡供電裝置具有較好的負序補償、無功補償和一定的諧波抑制能力。
6 結束語
本文提出了一種電力機車試驗線平衡供電系統設計方案,滿足電力機車靜調及動調試驗需求,同時能夠實現10kV進線側三相供電平衡,顯著減小線路電流幅值(減小值達42.3%以上),避免供電線路過負荷或負序保護跳閘,充分保障試驗線路供電可靠性。整體系統按照功能和主電路劃分為牽引供電子系統和功率平衡子系統,一次系統構成簡潔,功能和結構分區清晰,檢修維護方便,控制方法和保護策略簡單有效,同時具有占地面積小、損耗低等優勢。
參考文獻:
[1]李群湛.牽引變電所供電分析及綜合補償技術[M].北京:中國鐵道出版社,2006.
[2]趙強,張潤寶,薛玉霞,等.牽引變電所換相連接方式研究[J].電氣化鐵道,2010(2):28-31.
[3]姚金雄,張濤,林榕,等.牽引供電系統負序電流和諧波對電力系統的影響及補償措施[J].電網技術,2008,32(9):61-64.
[4]陳志博,蔣家久,沈輝,等.動車組試驗線牽引供電TSC+TCR型三相平衡補償裝置的系統設計[J].大功率變流技術,2010(5):38-44.
[5]陳志博,蔣家久,胡曉東,等.動車組試驗線牽引供電TSC+TCR型三相平衡補償裝置控制系統研制[J].大功率變流技術,2010(6):46-50.
[6]劉國友.智能電網應用的大功率IGBT模塊技術[J].電力電子,2009(6):14-17.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
