地鐵再生電能利用試驗系統仿真分析
2019-01-29 08:50:04李群湛
電氣化鐵道 2018年6期
關鍵詞:電能
代 靜,李群湛
?
地鐵再生電能利用試驗系統仿真分析
代 靜,李群湛
隨著再生制動技術在地鐵領域的普遍應用,以逆變回饋為代表的再生電能利用正處于蓬勃發展時期,然而在實際牽引供電系統中模擬列車典型工況并考核逆變回饋裝置的性能是十分困難的。本文基于地鐵再生電能利用試驗系統結構設計,仿真驗證了試驗系統模擬列車典型工況和考核逆變回饋裝置性能的可行性。
地鐵;再生電能利用試驗系統;典型工況;逆變回饋
0 引言
隨著以地鐵為代表的城市軌道交通的飛速發展,地鐵車輛再生制動電能利用的巨大潛力日益顯現。對比現有電阻耗能型、儲能型、逆變回饋型3種再生能量利用方式,逆變回饋型以其節能效果佳、技術成熟度高、經濟性強等優勢被廣泛應用于國內外地鐵線路中。本文基于地鐵再生電能利用試驗系統[1],對該試驗系統結構模擬列車典型工況并考核逆變回饋裝置的性能進行仿真分析。
1 試驗系統結構
地鐵再生電能利用試驗系統結構主要包括整流機組RC、可逆負荷機組ADR及逆變機組ADI,如圖1所示。整流機組RC、可逆負荷機組ADR和逆變機組ADI的變壓器T原邊分別通過三相低壓交流開關KA連接到35 kV或10 kV三相交流母線上,整流機組RC、可逆負荷機組ADR、逆變機組ADI直流側的一端通過直流開關KD連接到 1 500 V或750 V直流母線上,直流側的另一端通過接地線直接接地。
該方案下可逆負荷機組ADR為雙向可控,通過控制其IGBT變流單元可以模擬實際車輛的牽引工況和再生制動工況。牽引工況對應將直流電轉換成交流電,此時可逆負荷機組工作在逆變狀態;再生工況對應將交流電轉換成直流電,此時可逆負荷機組工作在整流狀態。
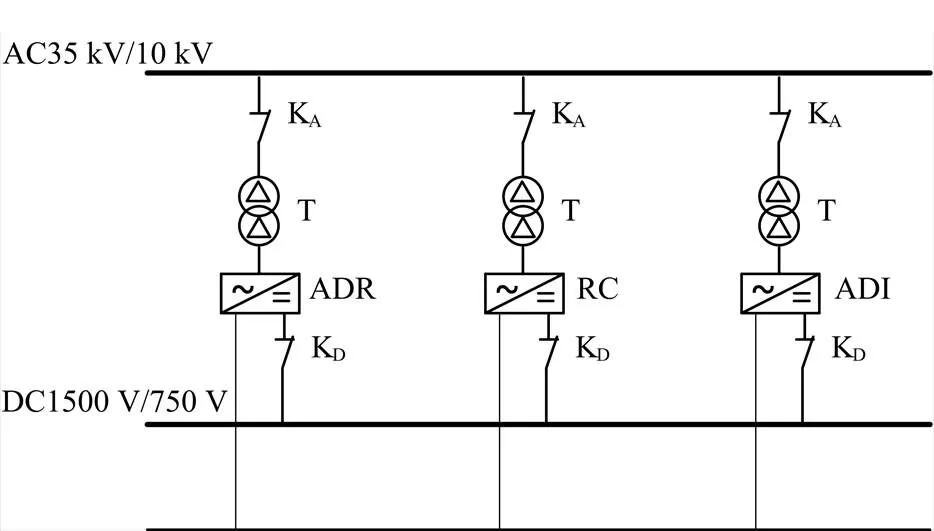
圖1 試驗系統結構
2 再生制動工況仿真分析
再生制動工況下系統工作原理如圖2所示。
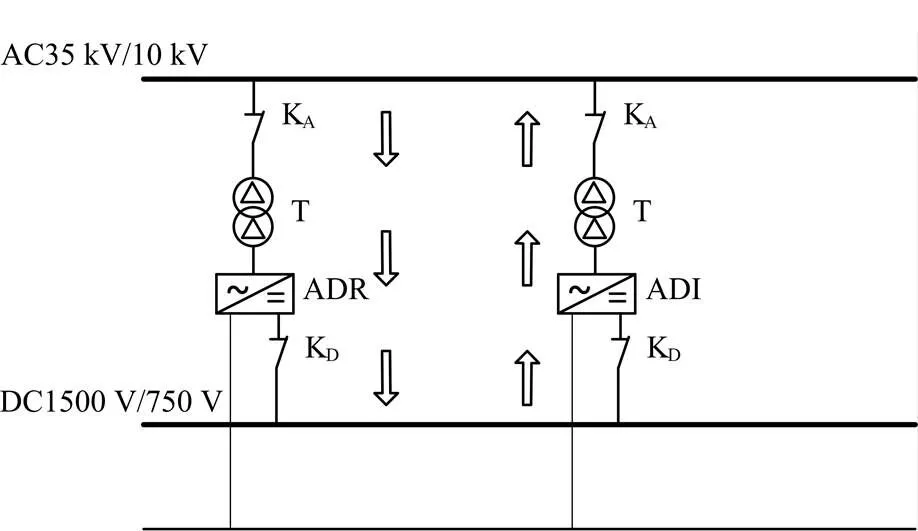
圖2 再生制動工況下試驗系統工作原理
再生制動工況下,可逆負荷機組ADR和逆變機組ADI工作,電能由ADR流向ADI。
2.1 模型搭建
可逆負荷機組ADR運行于整流狀態,模擬列車再生制動;逆變機組ADI作為逆變回饋裝置吸收再生制動能量。ADR和ADI的核心結構是PWM變流器。當列車處于再生制動工況時,電能由ADR流向ADI,其本質為2個背靠背PWM變流器[2,3]。再生制動仿真模型如圖3所示,變流器VSC1作為可逆負荷機組ADR工作于有源整流狀態,變流器VSC2作為逆變機組ADI工作于逆變狀態。VSC1和VSC2的電氣參數、結構、電流內環控制方式均相同,不同之處體現在外環控制,VSC1采用定直流電壓控制,VSC2采用定功率控制。
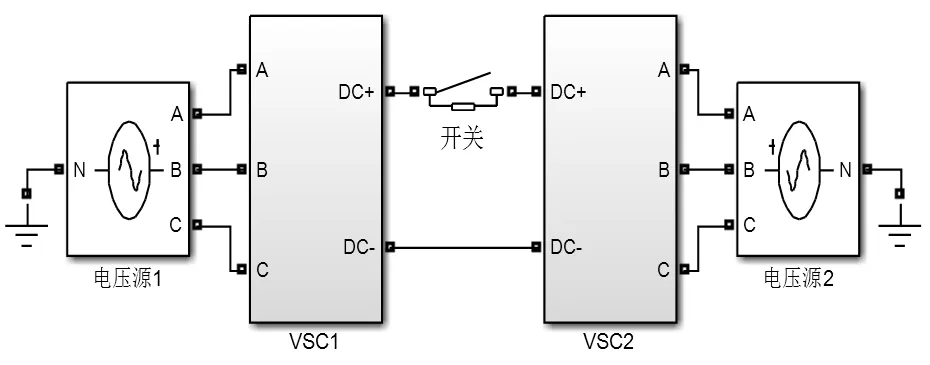
圖3 再生制動仿真模型
基于前饋解耦的電流內環控制器模型為
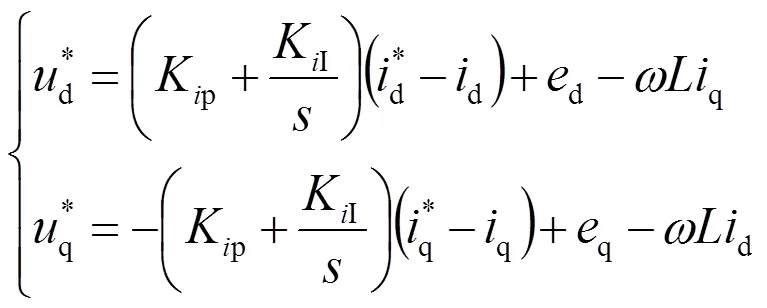

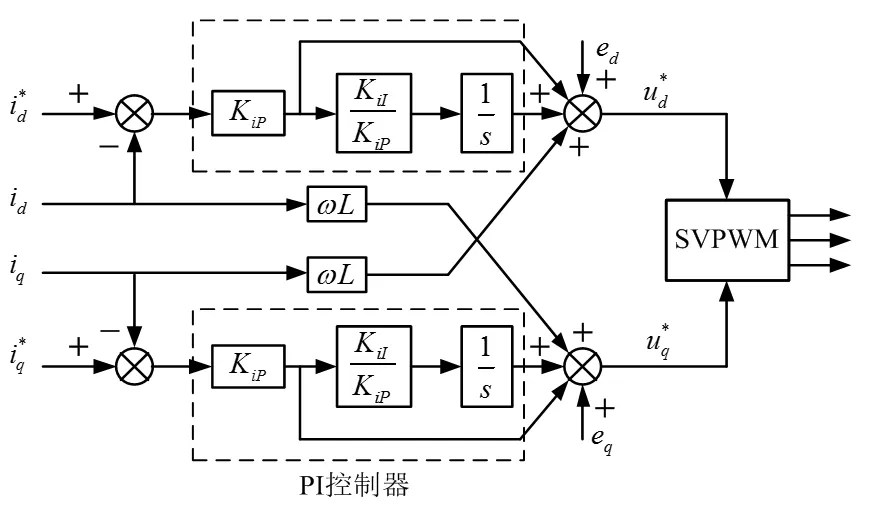
圖4 電流內環控制器結構
為保持系統直流側電壓的穩定及兩側系統間傳輸功率的平衡,其中一個變流器需采用定直流電壓控制。定直流電壓控制器模型如式(2)所示,電壓PI控制器的輸出作為有功電流d的參考量。圖5為外環定電壓控制框圖。

式中,Kup和KuI為電壓外環PI控制器參數。
系統有功功率和無功功率可通過有功電流d和無功電流q實現獨立控制,有功功率控制器和無功功率控制器的設計模型為
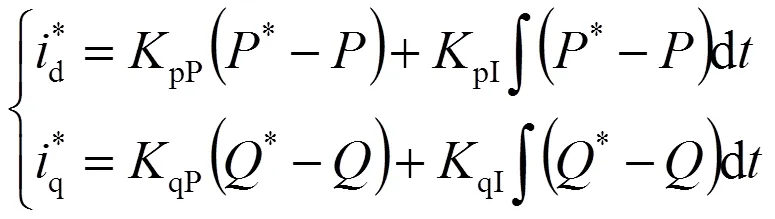
式中,pP、pI為有功功率PI控制器參數;qP、qI為無功功率PI控制器參數。
圖6為外環定功率控制框圖。
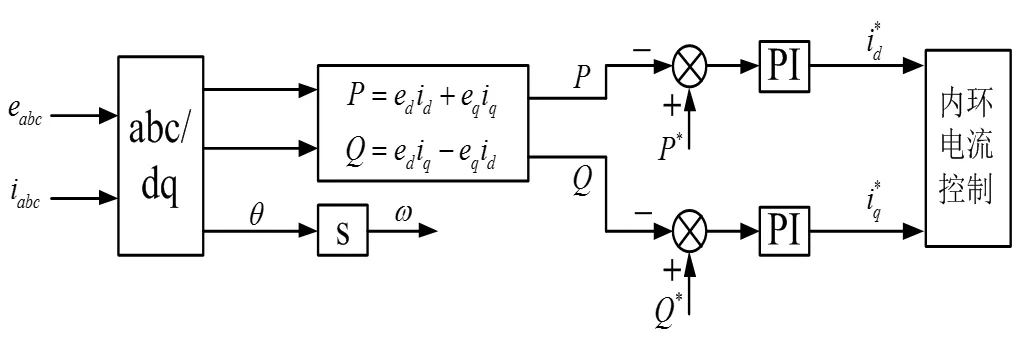
圖6 外環定功率控制
2.2 仿真分析
仿真參數:變流器交流側電源額定電壓380 V,頻率50 Hz,濾波電感0.6 mH,直流側電容 2 100 uF,IGBT開關頻率3 000 Hz。設置總仿真時長為0.4 s。
= 0 s時,啟動整流側變流器VSC1,設置直流側電壓給定值為860 V,直流電壓電流波形如圖7所示,可以看出直流電壓在變流器VSC1啟動后快速達到給定值。VSC1和VSC2交流側A相電壓電流波形分別如圖8和圖9所示,此時系統兩側未形成電流通路,輸出電流為零。
= 0.05 s時,閉合直流母線開關,逆變側變流器VSC2投入運行,設置有功功率給定值為0 kW,變流器VSC2功率曲線如圖10所示,此時功率給定值為零,系統輸出電流仍然為零。從圖7可以看出,VSC2投入不會引起直流電壓的波動。
= 0.1 s時,設置有功功率給定值為120 kW。從圖8、圖9可以看出,VSC1和VSC2的輸入電流不為零,VSC1電壓電流反向,提供有功功率;VSC2電壓電流同向,吸收有功功率。從圖10可以看出系統無功功率一直為零,實現了單位功率因數整流和逆變。
= 0.2 s時,將有功功率給定值設置為60 kW,系統功率經短暫調整后穩定在給定值。從圖8、圖9可以看出,VSC1和VSC2的輸入電流快速跟隨功率指令而響應。
= 0.3 s時,將電壓給定值調整為780 V,直流側電壓經短暫調整穩定運行在780 V。可以看出由于VSC2功率指令未發生變化,VSC1及VSC2的交流側電壓和電流均未變化,處于穩定狀態。
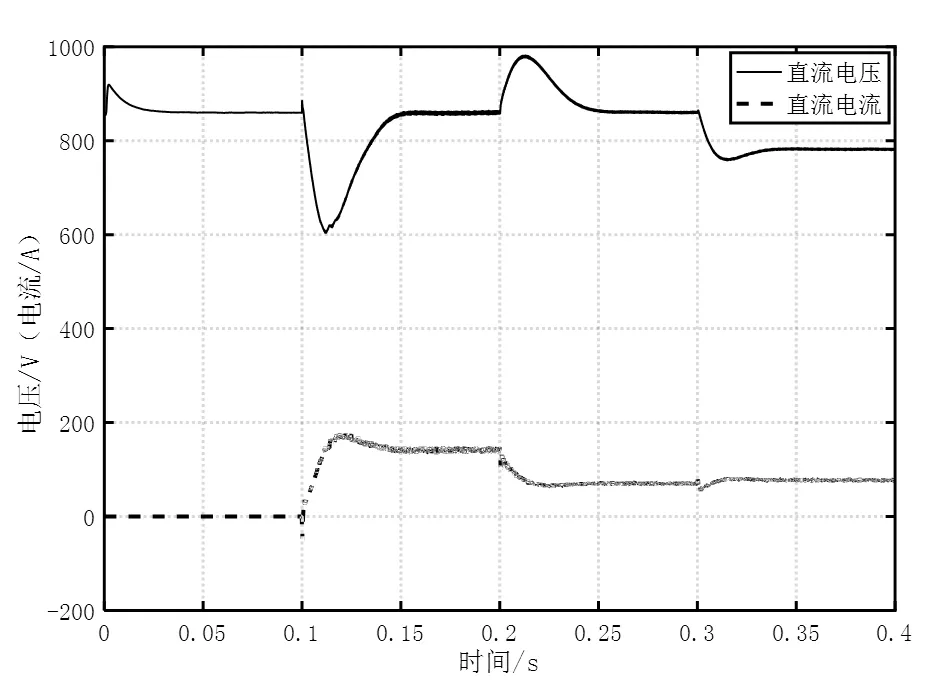
圖7 直流電壓電流波形
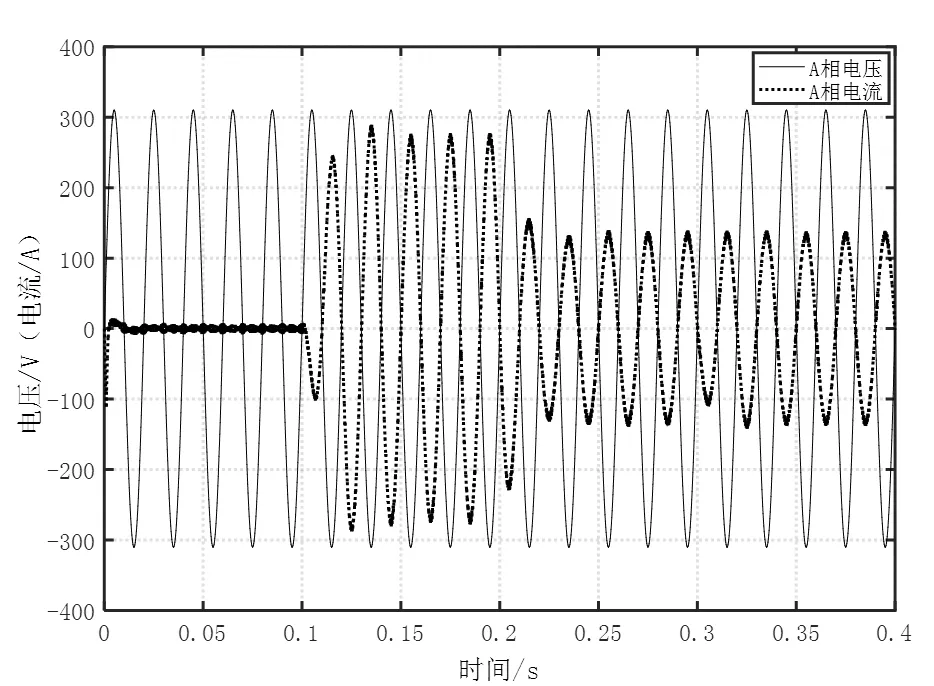
圖8 VSC1交流側A相電壓電流波形
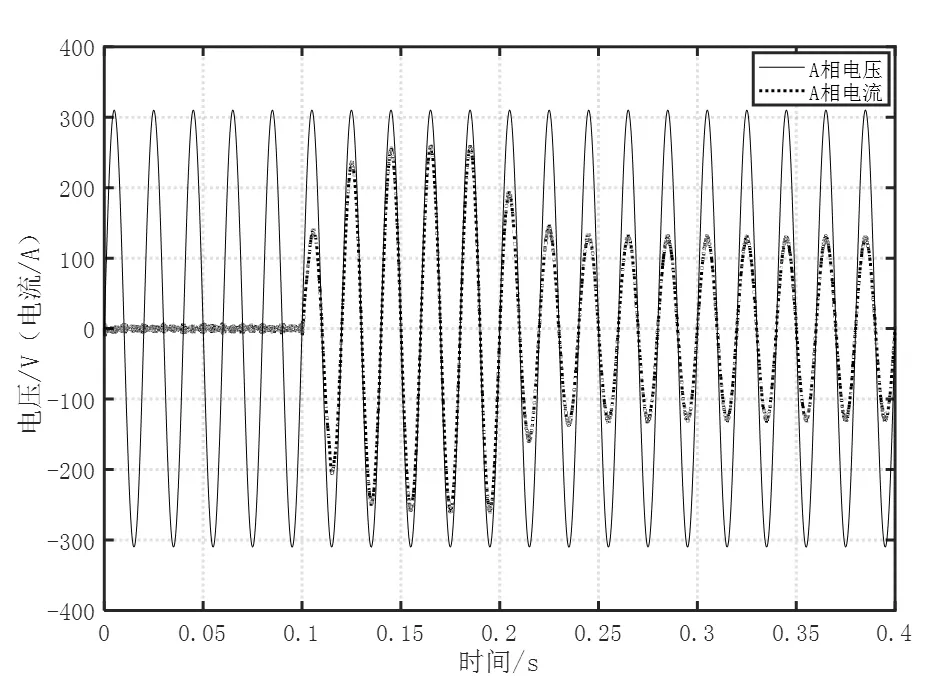
圖9 VSC2交流側A相電壓電流波形
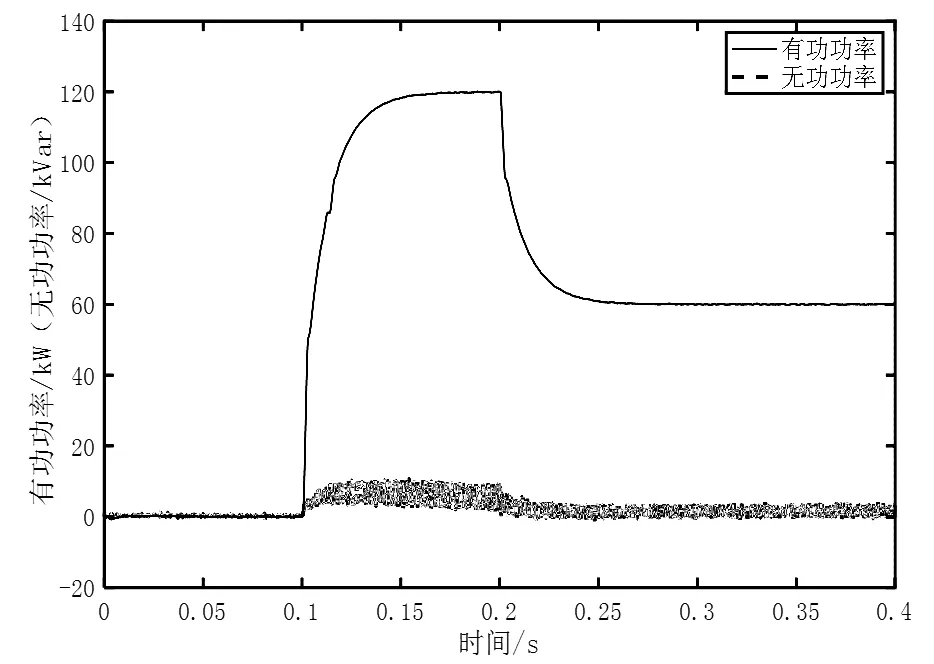
圖10 VSC2功率曲線
對VSC2交流側輸入電流諧波含量進行分析,如圖11所示。結果表明電流總畸變率為2.8%,且各次諧波含量低于0.5%,均符合逆、變回饋裝置并網電流諧波標準。
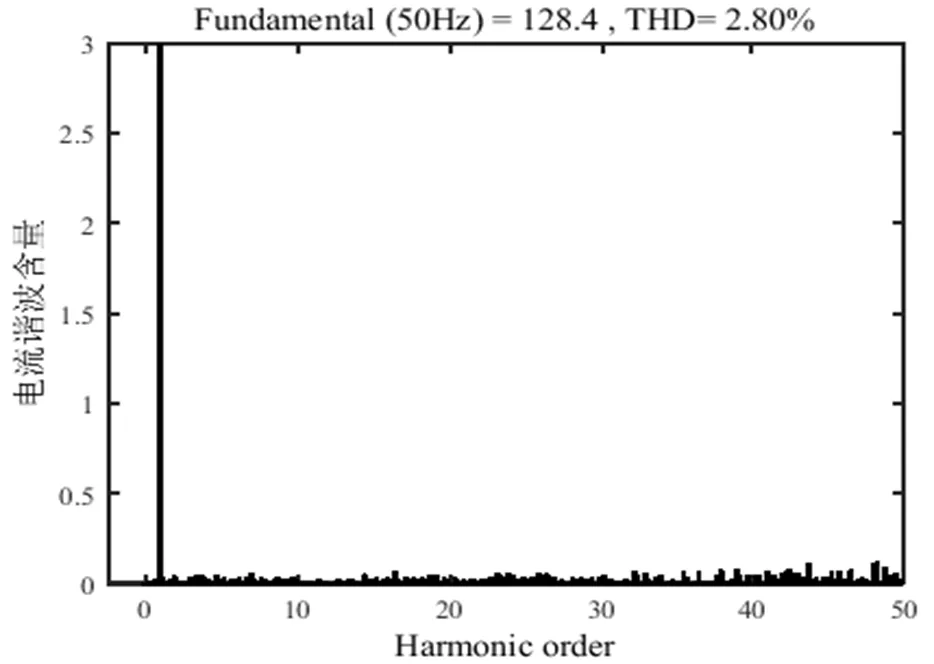
圖11 VSC2A相電流諧波分析
上述仿真過程結果表明,對系統兩側PWM變流器采用的定電壓和定功率控制策略具有良好的穩定性,直流側電壓和有功功率響應速度快,系統能很好地穩定直流母線電壓并按設定的功率值吸收再生能量;驗證了2臺變流器模擬列車再生制動工況的可行性,同時可按列車實際再生制動功率大小模擬列車再生制動和逆變回饋過程,且逆變側并網電能質量滿足國家標準。
3 牽引工況仿真分析
牽引工況時,整流機組RC和可逆負荷機組ADR工作,能量由整流機組流向可逆負荷機組。牽引工況下試驗系統工作原理如圖12所示,整流機組提供能量,可逆負荷機組運行于逆變狀態模擬列車牽引取流。
3.1 模型搭建
在Matlab/Simulink中搭建24脈波整流機組和PWM變流器VSC1仿真模型,如圖13所示。其中,變流器VSC1采用定功率控制,模擬列車從直流牽引供電系統吸收能量。
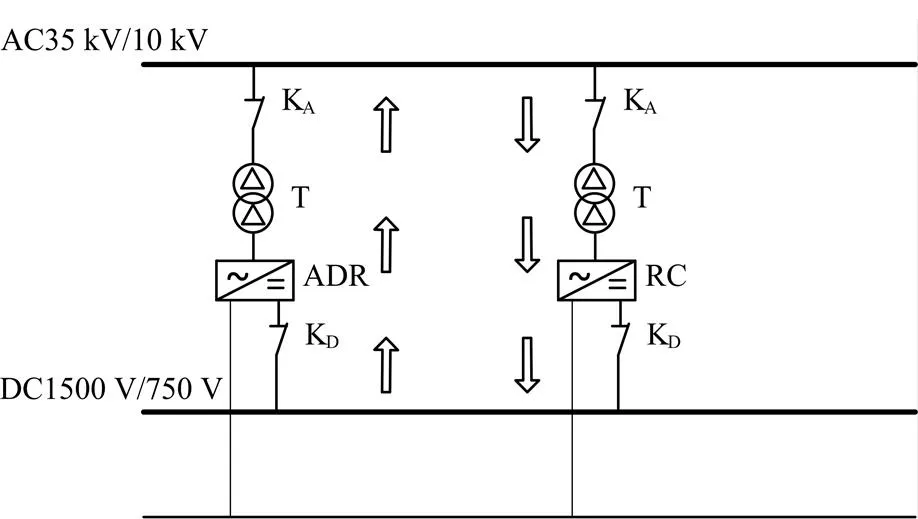
圖12 牽引工況下試驗系統工作原理
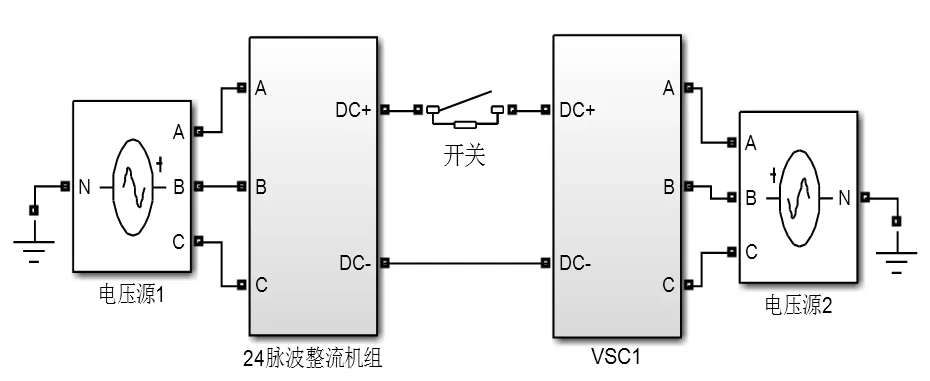
圖13 牽引仿真模型
3.2 仿真分析
仿真參數:24脈波整流機組交流側電源額定電壓10 kV,頻率50 Hz,直流側輸出額定電壓 750 V。變流器參數同上。設置總仿真時長為0.3 s。
= 0 s時,啟動整流機組,系統兩側未形成通路,整流機組和變流器A相電壓電流波形如圖14、圖15所示,從圖中可以看出此時整流機組和變流器輸出電流均為零。
= 0.1 s時,投入變流器,并設置有功功率給定值為120 kW,變流器功率曲線如圖16所示,從圖14、圖15可以看出此時整流機組和變流器電流不為零,按給定功率值輸出電流,且電壓電流基本同相位,實現單位功率因數逆變。
= 0.2 s時,更改有功功率給定值為60 kW,從圖14、圖15可以看出,整流機組和變流器電流快速跟隨功率指令變化。
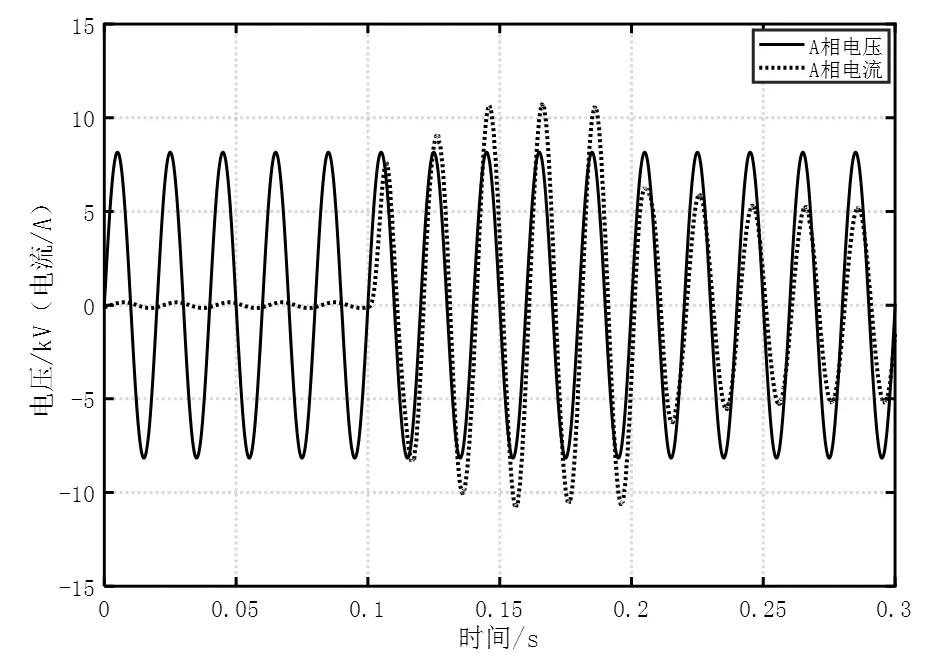
圖14 整流機組A相電壓電流波形
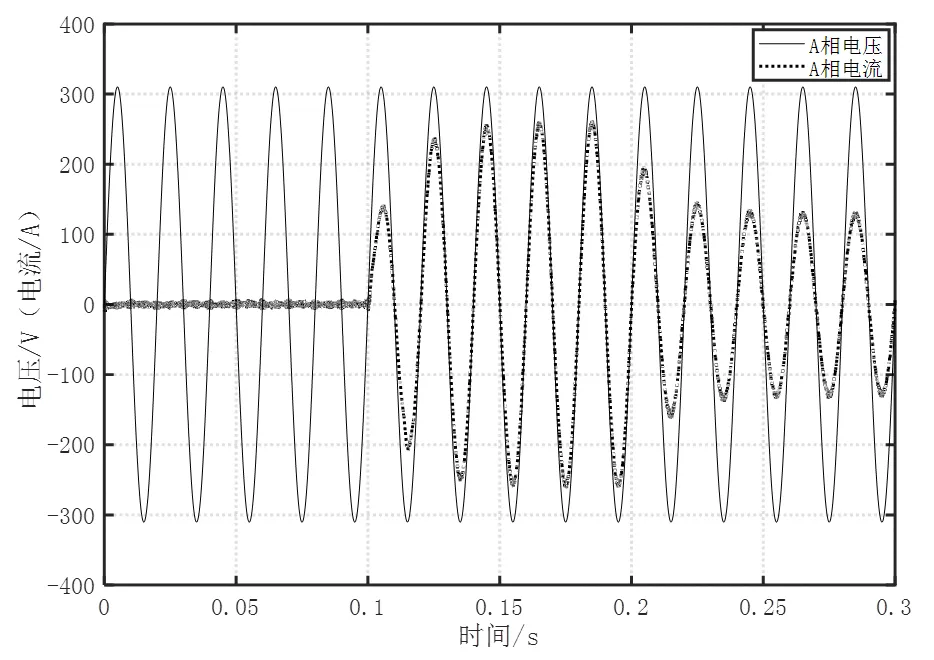
圖15 變流器A相電壓電流波形
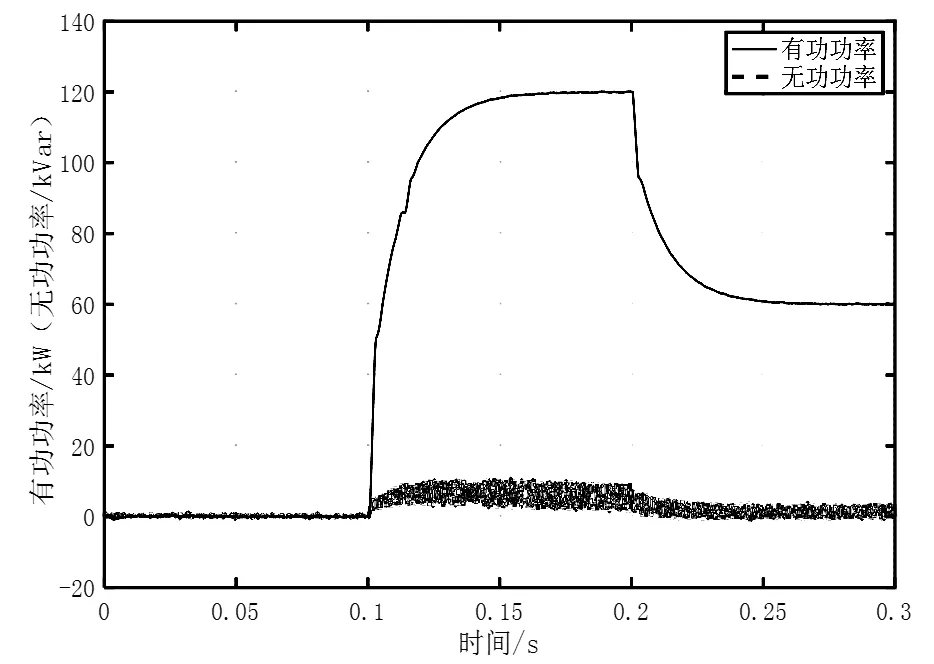
圖16 變流器功率曲線
通過上述仿真過程,說明采用整流機組和變流器結構模擬列車牽引工況具有一定的可行性,設定變流器有功功率給定值,即可模擬列車實際牽引取流過程。
4 結語
采用1臺整流機組、2臺變流器構成的地鐵再生電能利用試驗系統,通過控制2臺變流器整流與逆變功能的切換,即可按列車實際運行牽引功率和再生制動功率大小有效模擬列車典型工況并考核逆變回饋裝置的性能。
[1] 李群湛,郭育華,黃小紅,等. 一種直流牽引變電所再生電能利用試驗系統[P]. 中國,ZL201510560323.0,2015-12-02.
[2] 張興,張崇巍. PWM整流器及其控制[M]. 北京:機械工業出版社,2012.
[3] 王恩德,黃聲華. 三相電壓型PWM整流器的新型雙閉環控制策略[J]. 中國電機工程學報,2012,32(15):24-30.
Along with the common application of regenerative energy technology in field of subway, the regenerative energy utilization, marked by the inverse feedback, is in a vigorous development period; however, it is difficult to simulate the train’s typical working conditions and assess the inverse feedback devices during the actual traction power supply system simulation. On the basis of structural design of subway regenerative energy utilization test system, the paper introduces that the test system is able to simulate the train’s typical working conditions and to assess the performance of inverse feedback devices.
Subway; regenerative energy utilization test system; typical working condition; inverse feedback device
10.19587/j.cnki.1007-936x.2018.06.019
U231.8
A
1007-936X(2018)06-0077-04
2018-04-02
代 靜.西南交通大學電氣工程學院,碩士研究生;
李群湛.西南交通大學電氣工程學院,教授。
猜你喜歡
奧秘(創新大賽)(2020年1期)2020-05-22 02:42:38
小學科學(學生版)(2019年10期)2019-11-16 08:55:02
小哥白尼(趣味科學)(2019年12期)2019-06-15 10:56:32
通信電源技術(2018年3期)2018-06-26 06:34:18
人大建設(2018年2期)2018-04-18 12:17:00
紡織科學研究(2017年2期)2017-05-17 03:59:36
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
山東工業技術(2016年15期)2016-12-01 05:31:29
中學生數理化·中考版(2016年2期)2016-09-10 07:22:44
電測與儀表(2014年16期)2014-04-22 05:20:32
