基于53H濾波的船舶綜導信息在線平滑方法
2019-01-30 06:37:02耿建寧
艦船科學技術 2019年1期
呂 武,耿建寧
(中船航海科技有限責任公司,北京 100070)
0 引 言
隨著現代控制理論以及計算機技術的發展,為了滿足船舶高精度和高可靠性等方面的導航性能要求,目前國內外船舶導航系統向著以慣性導航系統為中心的多傳感器容錯導航系統的方向發展[1-4]。而導航系統可靠性的提高除了采用可靠的硬件之外,通過有效的數據處理方法也是提高可靠性的重要途徑。
綜合導航系統接收來自不同類型傳感器的信息,由于自身故障、環境干擾或者通信異常等問題,這些信息可能包含異常誤差。如果綜導系統融合了這些含有異常誤差的數據,那么綜導系統的精度會下降,甚至完全不可用。因此在綜導系統進行信息融合前,對各子系統的信息進行在線監測與野值數據處理顯得尤為重要。
針對上述問題,本文提出一種基于53H濾波的綜導信息在線平滑算法。該算法不要求數據滿足高斯正態分布,也不需要事先知道數據的標準差,而且算法實現簡單,適合對各導航傳感器的信息進行在線的信息監測和數據平滑。
1 改進的53H濾波算法
53H濾波算法最先由Tukey提出[13],其基本思想是產生一個曲線的平滑估計,然后通過將測量值與這一估計值進行比較來識別異常點。其基本步驟如下:
1)假設在線測量的數據序列為x(i),根據x(i)構造一個新序列x1(i),方法為:從x(1),x(2),x(3),x(4),x(5)選擇中值作為 x1(3),然后從x(2),x(3),x(4),x(5),x(6)中選出中值作為 x1(4),依次類推,直到當前的數據 x(i)。
2)按照步驟1)類似的方法,從 x1(j)中相鄰的3個數據中選取中值構成x2(k)。
3)最后由序列x2(k)按照如下方式構成x3(l):

4)如果有下式成立,則用 x3(l)代替x(l),

其中,T 為一定的閾值。
易知該算法對數據的前4個和最后4個數據得不到有效的平滑,所以文獻[13]提出了一種改進的53H濾波算法。
5)將x(i)的前8個和最后8個數據點反序排列,其余數據不變生成序列 x′(i)。
6)對序列 x′(i)重復前4個步驟,形成新的 x′3(l)序列,用新序列中的 x′3(5),x′3(6), x′3(7), x′3(8), x′3(l-7),x3′(l-6), x′3(l-5), x′3(l-4)分別替代序列 x(i)中的 x(4),x(3),x′3(2),x(1),x(l), x(l-1), x(l-2), x(l-3)。
為了達到實時平滑的目的, x3(l)和 x′3(l)可以并行計算。由于改進的53H算法對序列的開始和末尾的8個點進行了正反2次平滑,但是容易發現,即該算法仍然存在4個數據點的延遲。
2 基于改進53H濾波的信息在線平滑
船舶綜合導航系統的信息綜合處理路程如圖1所示。
可知,船舶綜合導航系統同時接受來自慣導、衛導、羅經、計程儀等導航傳感器的信息,這些信息經過一些合理性及有效性檢測等預處理后送到導航信息評估模塊,再送信息融合與集成處理模塊進行融合處理與分發。這些導航傳感器信息由于自身故障或者受到干擾以及通信中出現的問題可能會產生跳變等異常的數據,因此需要在預處理中對這些數據進行檢測和提出。目前的野值剔除方法主要有有效位判定,合理性檢查,拉格朗日插值2數據是正常的,否則會導致數據失真;基于加權最小二乘的滑動平滑濾波的計算量較大,且對較大的野值無法有效剔除。

圖1 船舶綜合導航信息綜合處理流程圖Fig. 1 Flow chart of ship integrated navigation information processing
這些信息按照一定的頻率進行傳輸,因此可以把它們當成時間序列。由于數據傳輸頻率遠高于航行速度,因此個別數據點的延遲對綜導系統的影響并不大,因此可以使用改進的53H算法對來自各個導航系統的信息進行在線平滑。
3 試驗驗證
為了驗證本文所提出方法的有效性,采用該方法對海試試驗數據進行處理分析,同時與最小二乘加權濾波和5點3次平滑算法進行對比。其中最小二乘滑動濾波的滑動窗取,假設數據采樣周期 T=1s,53H濾波的閾值設為:經緯度的閾值 Tp=Vmax/R,速度的閾值 Tp=amax?T ,姿態角的閾值 Tφ=ωmax?T,其中,Vmax ,amax ,ωmax分別為船的最大速度、加速度和角速度。
本文所選用的數據為某試驗船綜導系統采集的導航數據,包括慣導系統、衛導系統、計程儀、測速測深儀、電羅經等傳感器的數據,采樣頻率為1 Hz,采樣時間大約為11 h。以慣導為例,其輸出參數包括經緯度、東向速度、北向速度、橫搖角、縱搖角和航向角。輸出數據如圖1~圖3所示。從圖中可以看出慣導參數存在一些野值點,特別是速度和航向信息野值比較突出,如果直接對這些數據進行融合,將會產生較大的誤差。
為了避免野值點對系統精度的影響,對上述數據分別使用最小二乘滑動濾波法、5點3次平滑法以及改進的53H濾波法,進行在線平滑處理。由于篇幅原因不一一列出所有的平滑結果,僅選擇其中的東向和北向速度濾波結果進行分析,如圖5和圖6所示。
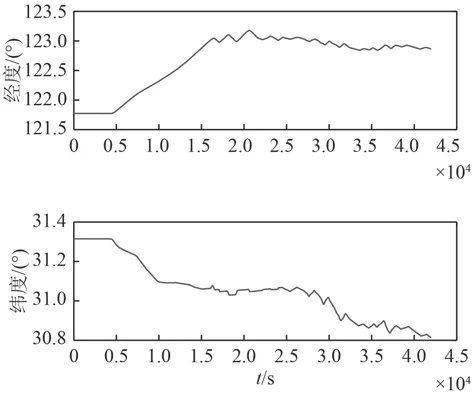
圖2 慣導測量經緯度Fig. 2 Longitude and latitude measured by inertial navigation system
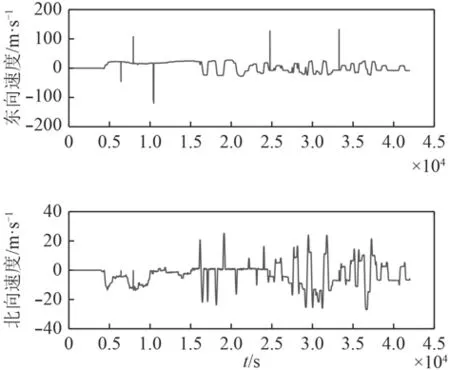
圖3 慣導測量速度Fig. 3 Velocity measured by inertial navigation system
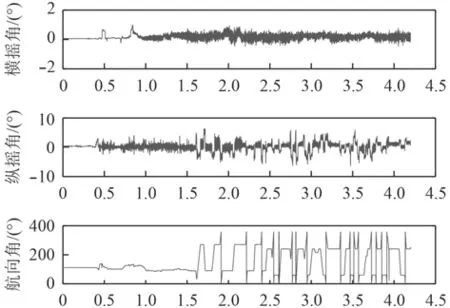
圖4 慣導測量姿態角Fig. 4 Attitude angle measured by inertial navigation system
由圖5和圖6可以看出,5點3次平滑結果嚴重失真,對大的野值沒有完全剔除,僅僅削弱了野值的幅值;最小二乘平滑算法沒有出現失真,但是也沒有完全消除野值;而基于改進的53H濾波法成功剔除了所有的野值點,而且保持了原始數據的真實性。根據上述分析表明,本文剔除的基于改進的53H在線平滑算法可行。
4 結 語
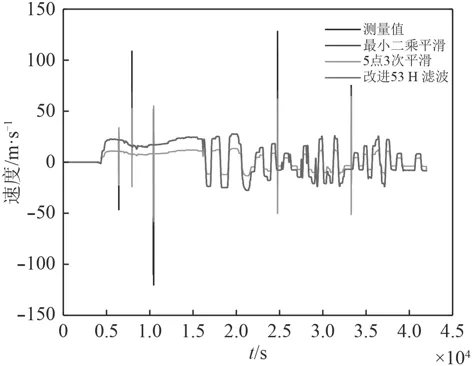
圖5 東向速度濾波結果Fig. 5 Filtering results of eastern velocity
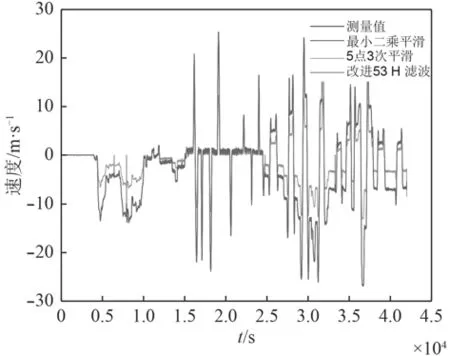
圖6 北向速度濾波結果Fig. 6 Filtering results of north velocity
本文首先闡述了53H濾波方法的原理及其改進方法,然后分析了該方法在船舶綜合導航系統信息在線平滑上的運用,最后通過實測數據試驗,并與最小二乘平滑濾波及5點3次平滑方法進行性能對比,試驗結果表明5點3次平滑方法對于較大的野值點沒法完全剔除,濾波會產生結果失真;最小二乘平滑濾波法計算量較大,且對大野值點只能起到抑制的作用。而本文提出的該方法計算簡單、具有很好的野值剔除效果,可用于綜導系統信息的在線平滑。
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28