數字單周期電流控制在電磁懸浮系統中的應用
2019-01-31 02:48:32蔣啟龍
西南交通大學學報 2019年1期
蔣啟龍 ,梁 達 ,2,閻 楓
(1. 西南交通大學電氣工程學院,四川 成都 611756;2. 磁浮技術與磁浮列車教育部重點實驗室,四川 成都611756)
電磁吸力懸浮系統具有非線性、不自穩的特點,為達到穩定懸浮的目的,一般采用氣隙-電流雙環控制,其中氣隙外環根據氣隙指令和實際氣隙通過一定控制律獲得電流指令信號;電流內環依據電流指令信號調節電磁鐵線圈中電流,進而改變電磁吸力大小,最終實現系統穩定懸浮[1]. 電磁鐵線圈屬于大感性負載,會限制電流響應速度和跟隨精度,從而影響到系統懸浮效果[2]. 電流環的作用就是讓線圈電流快速、準確地跟隨指令電流信號.
為滿足懸浮系統要求,電流環應具備以下特點:(1) 在噪聲限制允許的范圍內,電磁鐵電流能夠快速、精確地跟隨指令電流[3];(2) 有較強的魯棒特性,以增強系統的抗擾動性能[4];(3) 電流紋波應盡可能小,以避免懸浮力波動[5]. 在現存的電流控制中,基于bang-bang控制原理的電流環時間最優控制具有跟蹤速度快的優點,但誤差帶較大,系統在受到隨機擾動時極易失穩;次速電流控制結合了最速電流控制和PI控制的優勢,電流調整速度與最速電流控制相當,且克服了最速電流控制抗干擾性能差的缺點[6],但存在參數不易整定及控制狀態切換點難以選擇的不足,且達到穩態時會存在一定的跟隨誤差.為了改善電流響應性能,程金路等[7]和張東升等[8]分別采用有限拍算法和三步電流控制法來加速電流響應,但都存在計算復雜的缺點.
數字單周期控制理論是20世紀90年代初提出的一種非線性大信號PWM (pulse width modulation)控制理論[9],其基本控制思想是保證每一個開關周期中開關變量與控制參考量相等或成比例. 該方法被廣泛運用在電壓型控制AC-DC和DC-DC功率變換器的控制中,且主要通過模擬電路來實現[10-11].由于單周期控制存在實現簡單、魯棒性強的優點,近年來有學者致力于單周期控制方法的數字化實現[12-16]. 文獻[17-18]基于對一個開關周期電流波形高速多次采樣,構建了數字形式的積分器來實現數字單周期控制(digital one-cycle control,D-OCC);文獻[19]在一個開關周期內對電流采樣一次,并假設該開關期間電流為常數,忽略了開關周期內電感電流的變化,對系統瞬態性能的影響. 上述內容中,D-OCC方法都是在AC-DC電路中實現的,對此文獻[20]提出將單周期算法應用于懸浮系統DC-DC功放電路控制中,實現了對指令電流的跟蹤,但未與其他控制方法的跟隨效果進行比較,也未在實際系統中驗證是否滿足懸浮系統的性能要求. 本文基于TMS320F28335 設計了EMS (electromagnetic suspension system)的D-OCC電流控制器,并將之應用到在實際懸浮系統的電流控制中進行懸浮實驗. 實驗結果表明,與電流環PID (proportion integration differentiation)控制相比,采用D-OCC具有更加平穩的動態響應性能.
1 懸浮系統及斬波器模型
EMS的反饋線性化模型如式(1)所示[21].

式中:i(t)為電磁鐵線圈電流大小;z(t)為懸浮氣隙;g為重力加速度;u(t)為電磁鐵線圈兩端電壓;μ0為真空磁導率;m為電磁鐵等效荷載;N為電磁鐵線圈匝數;A為有效磁極面積;R為線圈內阻;fd為外力擾動.
根據式(1)給出的數學模型,可得EMS的氣隙-電流雙環控制結構如圖1所示[22],其中:z0為初始懸浮氣隙;iref為電流指令.
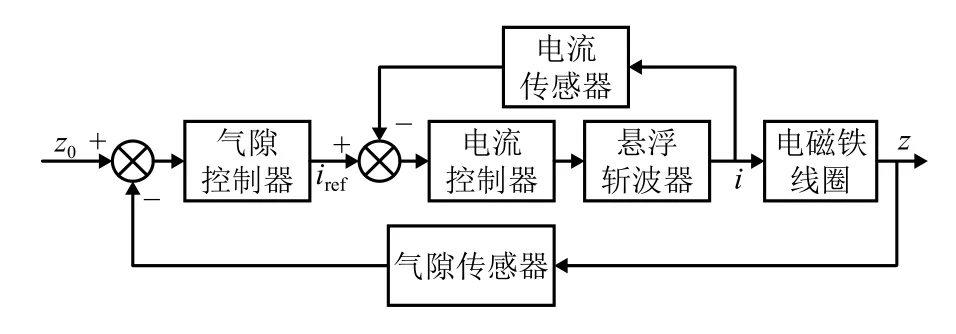
圖1 懸浮系統氣隙-電流雙環控制結構Fig.1 Air gap-current double loop control structure of EMS
圖1 所示控制系統結構的電流環部分傳統方法采用PID控制,本文則采用D-OCC. 結合斬波器電路,該部分具體結構如圖2所示,其中,Vgs1和Vgs2為驅動脈沖.
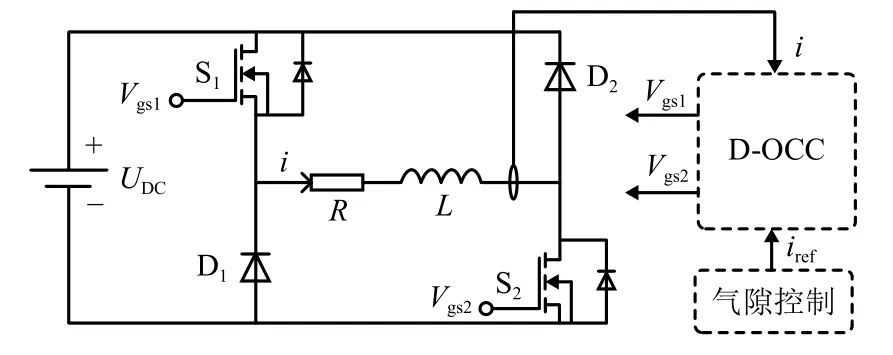
圖2 懸浮斬波器電路及D-OCC原理示意Fig.2 Schematic diagram of chopper circuit and D-OCC
為了進一步研究D-OCC算法,首先對斬波器工作原理進行分析. 為達到電流快速調節的目的,斬波器一般采用S1、S2同時通斷的控制方式. 由于懸浮系統穩定工作時線圈電流連續,且當S1、S2同時導通時,負載兩端承受正向電壓,電源給負載提供能量,線圈電流增加;當S1、S2同時關斷,負載兩端承受反向電壓,能量從負載回饋至電源,線圈電流減小. 因此斬波器的數學模型可用式(2)進行描述.
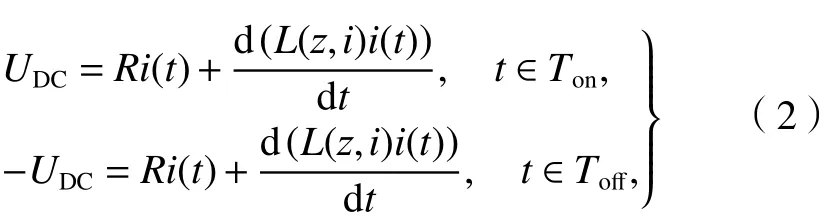
式中:UDC為直流母線電壓;L為電磁鐵的線圈等效電感.
假設懸浮電磁鐵在額定點(z0,i0)鄰域工作,懸浮氣隙微小的變化對線圈電感、電阻的影響可以忽略;開關頻率較快,且電磁鐵線圈電感足夠大,在一個開關周期內電感電流可以認為是線性變化的,則斬波器的數學模型簡化為式(3).

式中:R0、L0分別為電磁鐵線圈在額定工作點的等效電阻和等效電感;iav為被采樣開關周期的平均電流;Δi+、Δi-分別為對應周期內開關導通期間和關斷期間線圈電流的變化量;Ts為開關周期;d為開關占空比.
懸浮線圈中電阻的存在限制了斬波器輸出電流的大小,從而也就決定了系統在額定工作點的電流必須滿足式(4).

當線圈電流達到i0并維持恒定時,要求一個開關周期內開關導通期間電流增加量與斷開期間電流減小量相等,則此時占空比如式(5)所示.

式中:d0為系統處于額定工作點時維持電流恒為i0所需的開關占空比.
由式(5)可知,維持恒定電流的占空比與電流大小呈現一次線性關系,斜率大小為 R /(2UDC) ,所需占空比隨著電流增加而增大.
2 電流D-OCC原理
D-OCC的基本思想就是通過計算并給定開關占空比,使得采樣開關周期內滿足 iav=iref.
以一個開關周期為研究階段,則在懸浮線圈工作過程中存在電流增加、電流平衡和電流減小3種狀態. 設電流在第n開關周期變化量為Δi(n),則在電流增加狀態 ? i(n)>0 , 電流平衡狀態 ? i(n)=0 ,電流減小狀態 ? i(n)<0 .
以TMS320F28335為控制器,當采用增-減計數模式PWM波作為開關驅動時,3種電流狀態的DOCC 波形分別如圖 3(a)~(c)所示.
圖3中:TBPRD和TBPHS分別為數字處理器時基周期寄存器和時基相位寄存器的值;ik為時刻tk線圈電流大小;Δik為時間段tk~tk+1內電流增量;ΔI為一個開關周期電流增量.
以電流增加狀態為例進行分析. 電流增加狀態的控制波形如圖3(a)所示,第n開關周期電流變化量 Δi(n) > 0,而每個開關周期又可以根據電流變化方向分為3個不同時間段:
(1) 時間段 t1~t2
在時間段 t1~t2,S1、S2同時導通,D1、D2關斷,負載承受正向電壓,線圈電流增大,由式(3)得電流增量方程為

(2) 時間段 t2~t3
在時間段 t2~t3,S1、S2同時關斷,D1、D2導通,負載承受反向電壓,線圈電流減小,電流增量方程為

(3) 時間段 t3~t4
時間段t3~t4與時間段t1~t2類似,電流增量方程為

因此可得在增減計數PWM模式下,開關周期內電感電流的增量方程為

由式(9)可以推導出,該開關周期的開關占空比為

在采用圖3給出的PWM控制波形情況下,周期內平均電流iav如式(11)所示.


圖3 不同電流狀態增-減計數PWM模式D-OCC波形Fig.3 Waveform of D-OCC based on up-down count PWM mode in different current states
根據D-OCC思想 iav=iref,可以得到:

將式(12)代入式(10),可得到最終占空比如式(13).

式中:i1為周期初始電流.
由式(13)可知,在恒壓供電的方式下,每個周期只需要采樣周期電流初值與參考電流大小即可計算出開關占空比大小,而懸浮系統中參考電流由氣隙控制器給定.
上述給出D-OCC算法中開關占空比的計算過程. 對比式(6)和式(7)可知,開關導通時線圈電流增加速率小于開關關斷時電流減小速率,且兩者之間的差值隨著平均電流的增加而增大. 因此,對初始電流為0的線圈負載施加滿足式(5)所示占空比的PWM驅動波形時,線圈電流將以先快后慢的速率增加,當電流均值達到i0時,每個開關周期的電流增量為0 (單個周期開關開通期間電流增加量與關斷期間電流減小量相等).
3 單周期電流控制仿真及實驗
為驗證單周期電流控制算法的有效性,利用Simulink軟件進行仿真驗證,并對電流環D-OCC的懸浮模型與電流環PID控制的懸浮系統進行仿真和實驗比較.
3.1 仿真及實驗參數
磁浮小車的單電磁鐵模型參數如表1所示.

表1 單電磁鐵模型參數Tab.1 Single electromagnet model parameters
為使仿真結果與實際系統相對應,D-OCC算法仿真參數依據實際系統設定,具體參數如表2所示.

表2 仿真參數Tab.2 Simulation parameters
表2中:線圈等效電阻通過離線測量所得,線圈等效電感則根據公式 L0=μ0N2A/(2z0) 計算得出.
3.2 仿真及實驗參數
根據表2給出的參數建立D-OCC的電流環仿真模型,對偏置為3 A,幅值為3 A,頻率為5 Hz的方波指令電流進行跟隨的仿真波形如圖4所示. 由圖4可知,D-OCC和PID控制下電流都可以快速跟隨指令電流,電流穩定時兩種控制方式的紋波幅值均為5 mA,但無論如何調節參數,PID控制始終存在不小于20 mA的穩態誤差,且隨著指令電流值的增加,穩態誤差有增大趨勢. 而在相同條件下,D-OCC則可以精確跟隨指令值,不存在穩態誤差. 仿真結果表明,對指令電流跟隨效果的動態性能和穩態性能,D-OCC均滿足懸浮系統要求.

圖4 D-OCC電流跟隨仿真波形Fig.4 Current follow simulation waveform based on D-OCC
將D-OCC算法應用到懸浮系統的電流環控制中進行仿真,系統啟動、加減載及氣隙擾動工況的仿真結果如圖5和圖6所示.

圖5 數字單周期電流控制懸浮系統起浮及加減載仿真波形Fig.5 Simulation waveforms of levitation system using current D-OCC with conditions of no-load floating,50% loading and load shedding
圖5 給出單周期電流控制懸浮系統起浮及加減載時電流和氣隙波形. 由圖5可知,電磁鐵初始氣隙為13.0 mm,起浮時最大電流達到12.0 A,經過0.25 s調整系統穩定懸浮在指定氣隙6.5 mm的位置,電流穩定在3.0 A. 仿真運行至1.00 s時刻,系統加載3.25 kg,相當于空載質量的50%,電流迅速增加,峰值達5.0 A,懸浮氣隙在增大方向上產生1.5 mm波動,經過約0.20 s的調整,電流減小并穩定在3.8 A,懸浮氣隙恢復至6.5 mm. 仿真運行至2.00 s時刻,系統減載3.25 kg,電流迅速減小,懸浮氣隙在減小方向上產生1.5 mm波動,經過約0.20 s的調整,電流增加并穩定在3.0 A,懸浮氣隙恢復至6.5 mm.

圖6 數字單周期電流控制懸浮系統氣隙擾動仿真波形Fig.6 Simulation waveform of air gap disturbance condition in levitation system using current D-OCC
圖6 給出單周期電流控制懸浮系統氣隙擾動的仿真波形. 系統初態穩定在6.5 mm處,穩定電流為3.0 A,仿真運行至0.50 s和1.50 s時刻分別施加幅值為1.0 mm,持續15 ms的氣隙擾動. 波形顯示施加脈沖擾動瞬間電流和氣隙都出現明顯波動,但經過約0.20 s的調整系統重新恢復穩定狀態.
仿真結果表明,采用D-OCC的電流環應用到懸浮系統中,可以實現系統穩定懸浮,并且有良好的抗負載擾動和抗氣隙擾動性能.
為了進一步比較電流環分別采用兩種控制方式時懸浮系統的控制性能,在氣隙外環采用PID控制的前提下,電流內環分別采用PID控制和D-OCC進行仿真.
圖7給出了兩種控制方式在空載起浮和50%加載、減載情況下懸浮氣隙的仿真波形. 由圖7可知,無論是空載起浮、50%加載、50%減載工況,電流環采用PID控制的調節速度比采用D-OCC略快,但調節過程中氣隙波動較大. 圖8給出兩種控制方式在穩定懸浮情況下受到1.0 mm氣隙擾動時的氣隙仿真波形,由圖8可知,PID控制對氣隙擾動較為靈敏,可以迅速作出響應,大約經過0.20 s可以調整恢復至穩態,但調整過程中出現3次氣隙波動. 在相同氣隙擾動條件下,D-OCC的響應情況較遲鈍,但系統恢復至穩定狀態的時間基本與PID控制相同,且調整過程中氣隙波動次數較少,只出現1次波動. 當系統調節達到穩定狀態后,兩種方法對系統的控制效果基本相同.

圖7 兩種控制方式空載起浮及50%加減載氣隙波形比較Fig.7 Comparison of air gap waveforms in two control modes with conditions of no-load floating,50% loading and load shedding

圖8 兩種控制方式1 mm氣隙擾動時氣隙波形比較Fig.8 Comparison of air gap waveforms in two control modes with1mm air gap disturbance
3.3 實驗結果及分析
為了進一步驗證D-OCC算法的有效性,設計基于TMS320F28335的數字單周期電流控制器,并將之投入到實際系統中進行懸浮實驗.
懸浮小車單電磁鐵模型機械結構如圖9所示,圖中:①表示電磁鐵線圈,由500匝直徑為1.62 mm的漆包線繞制而成;②是由鋁合金材料加工成的連接板,用于實現懸浮電磁鐵與懸浮架之間的剛性連接;③是采用電工純鐵材料加工成的U型電磁鐵鐵芯;④是T型導軌,采用10 mm厚度的鍍鋅鋼材料;⑤是氣隙傳感器探頭,通過鐵夾固定在鋼軌上方的懸浮架上;⑥是由鋁合金材料加工而成的懸浮架.

圖9 單電磁鐵模型機械結構Fig.9 Single electromagnet model mechanical structure
在圖10~12中:示波器通道1測量電流波形,分辨率為2.5 A/div;通道2測量氣隙波形,分辨率為4 mm/div.
圖10給出了兩種控制方式下系統空載(電磁鐵等效質量為6.50 kg)起浮時的電流和氣隙波形. 由圖10(a)可知,電流環采用PID控制的情況下,系統起浮瞬間電流迅速增加,最大達到15.0 A,于此同時懸浮氣隙減小,經過0.50 s的調整達到穩定狀態,但在調節過程中電流和氣隙均出現多次波動. 由圖10(b)可知,電流環采用D-OCC的情況下系統起浮時峰值最大電流約為13.0 A,隨著懸浮氣隙的減小電流減小,大約需要0.40 s的調整系統可以穩定.兩種控制方式下系統穩定在給定氣隙6.5 mm時,電流穩定在3.0 A.

圖10 單周期電流控制懸浮系統起浮實驗波形Fig.10 Experimental waveform of floating condition in EMS using current D-OCC
圖11 給出了兩種控制方式下系統穩定懸浮時50%(3.25 kg)加減載情況下電流和氣隙實驗波形.由圖11(a)可知,電流環采用PID控制,加載瞬間電流出現較大波動,峰值達到7.0 A,對應的氣隙出現約為3.5 mm的波動,經0.50 s調節達到穩態,此時氣隙值為 6.5 mm,電流值為 3.8 A. 由圖 11(b)可知,電流環采用D-OCC,系統加載瞬間,電流最大值約為5.0 A,同時存在2.0 mm氣隙波動,經0.20 s調整氣隙恢復至6.5 mm,電流穩態在3.8 A. 系統進行50%減載瞬間,氣隙與電流出現相同趨勢減小,最終氣隙恢復設定值,電流穩態值由3.8 A減小至3.0 A,但在減載過程中電流及氣隙調節過程都比較平穩.
圖12 給出了兩種控制方式下系統穩定懸浮時施加1.0 mm脈沖氣隙擾動的實驗波形. 由圖12(a)可知,在電流環采用PID控制的情況下,遇到1.0 mm氣隙擾動時,電流和氣隙會產生較大波動,電流波動的最大值為6.0 A,氣隙波動約為2.5 mm,經過0.50 s調整恢復至穩定. 由圖12(b)可知,在電流環采用D-OCC的情況下,遇到1.0 mm的脈沖氣隙擾動時,電流值波動的最大值為5.0 A,氣隙波動約為1.0 mm,經過約0.70 s調整系統重新恢復穩定. 實驗結果表明,電流環采用PID控制對氣隙擾動比較敏感,可以快速調整,但調整過程中電流和氣隙波動較大,而電流環采用D-OCC調整過程中波動較小.
綜上比較,電流環采用D-OCC的EMS可以實現穩定懸浮,且具有良好的抗負載擾動和抗氣隙擾動性能,與電流環采用PID控制相比,在起浮、加減載及氣隙擾動情況下,動態調節過程更平穩. 由于實驗系統漏磁、軌道氣隙不均勻等因素,實驗與仿真結果變化趨勢相同,但具體數據存在一定差距.
4 結 論
本文對EMS懸浮斬波器的D-OCC算法進行了詳細推導,并將采用D-OCC的電流環投入懸浮系統中進行仿真和實驗. 可以得出以下結論:
(1) D-OCC算法簡單,易于實現,較模擬單周控制具有控制靈活、可移植性強、便于調試等優點;
(2) 仿真及實驗結果表明采用D-OCC的電流環能夠實現對指令電流快速準確跟隨,電流環采用D-OCC滿足懸浮系統工作要求,與電流環采用PID控制相比具有較平穩的調節性能,且具有優良的抗干擾性能.
(3) 本文的D-OCC算法是在懸浮電磁鐵處于某一額定懸浮點,即將線圈電感理想化為常數的情況下推導得出的. 因此需要控制系統的外環具有良好的調節能力,使電磁鐵維持平衡點附近,使該算法趨于準確. 在后續的研究中,可以對線圈電感參數進行在線識別,從而使該算法不受外環控制性能的約束.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
電信科學(2016年10期)2016-11-23 05:11:56