六軸工業(yè)機器人控制系統(tǒng)的設計與實現(xiàn)
2019-02-04 16:11:04嚴均周煌輝
科技資訊 2019年33期
嚴均 周煌輝

摘? 要:隨著工業(yè)機器人在工業(yè)領域的應用不斷拓展,作為工業(yè)機器人核心組成部分的控制系統(tǒng)成為研究的熱點。該文簡要闡述了工業(yè)機器人的構造以及控制系統(tǒng)在工業(yè)機器人整體設計中的重要性,在現(xiàn)有工業(yè)機器人控制系統(tǒng)的基礎上,探討了六軸工業(yè)機器人控制系統(tǒng)的設計與實現(xiàn),包括六軸工業(yè)機器人控制系統(tǒng)的硬件架構、關節(jié)伺服電機與驅動器以及工控機軟件系統(tǒng)的設計等。
關鍵詞:工業(yè)機器人? 控制系統(tǒng)? 六軸機器人? 控制系統(tǒng)設計
中圖分類號:TP242 ? ?文獻標識碼:A 文章編號:1672-3791(2019)11(c)-0078-03
Abstract: With the continuous expansion of industrial robot applications in the industrial field, the control system as the core component of industrial robot has become a hot research topic. This paper briefly expounds the construction of industrial robots and the importance of control systems in the overall design of industrial robots, and discusses the design and implementation of six-axis industrial robot control systems, including the hardware architecture of six-axis industrial robot control systems. Joint servo motors and drives, as well as the design of industrial control machine software systems.
Key Words: Industrial robot; Control system; Six-axis robot; Control system design
工業(yè)機器人是一種在工業(yè)領域應用廣泛的自動操作裝置,由于具備一些人體的功能特點,因此被稱為工業(yè)機器人。工業(yè)機器人可以代替人類在各種危險、嚴苛的環(huán)境下進行高效作業(yè),在某些方面甚至比人工作業(yè)更具可靠性與高效率。比如在深海、太空、危險化學環(huán)境及真空環(huán)境中等,工業(yè)機器人可以勝任很多人類所無法完成的工作。工業(yè)機器人的出現(xiàn)在很大程度上改變了工業(yè)領域的作業(yè)方式,在安全性、工作效率等方面具有特別的優(yōu)勢,因此受到世界各國廣泛的重視。控制系統(tǒng)是工業(yè)機器人的核心,工業(yè)機器人的性能優(yōu)劣在很大程度上取決于其控制系統(tǒng)的設計水平。該文基于當前工業(yè)機器人控制系統(tǒng)的研究現(xiàn)狀,就六軸工業(yè)機器人控制系統(tǒng)的設計與實現(xiàn)進行一些探討。
1? 工業(yè)機器人的構造
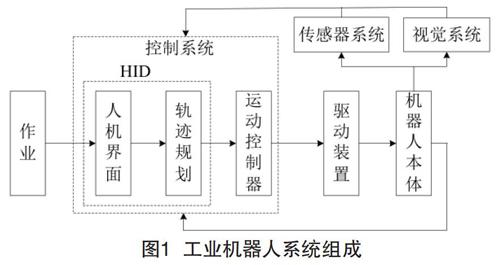
工業(yè)機器人一般由機械本體、驅動裝置及控制系統(tǒng)這3個部分組成,根據(jù)不同的功能需求,有些工業(yè)機器人還包括傳感系統(tǒng)及視覺系統(tǒng)。機械本體是工業(yè)機器人的機械執(zhí)行機構,主要由底座、臂、腕、關節(jié)以及末端執(zhí)行器構成。末端執(zhí)行器是工業(yè)機器人執(zhí)行操作動作的裝置,根據(jù)應用場合的不同及作業(yè)需要,可以在其上安裝各類夾具、工具或傳感器等。驅動裝置用以為工業(yè)機器人的機械本體提供動力,目前常用的工業(yè)機器人驅動方式主要有3種,即電氣傳動、液壓傳動以及氣壓傳動。相較于液壓傳動與氣壓傳動,電氣傳動由于能源供給便利、效率更高以及更具靈活性,在當前工業(yè)機器人設計中被廣泛采用。工業(yè)機器人的電氣傳動通常采用交流伺服驅動系統(tǒng),一般由伺服電機、伺服驅動器以及減速器等部分組成[1]。
控制系統(tǒng)是工業(yè)機器人的核心,是工業(yè)機器人的“大腦”,工業(yè)機器人所要完成的各種動作、操作均需由控制系統(tǒng)來設計實現(xiàn)。工業(yè)機器人控制系統(tǒng)的功能與作用主要是進行機器人動作的軌跡規(guī)劃、插補運算、運動學計算以及計算機器人各軸的位置、姿態(tài)等。同時,控制系統(tǒng)還負責接收并處理來自工業(yè)機器人傳感器系統(tǒng)的信號數(shù)據(jù),依據(jù)系統(tǒng)設定來完成指令輸出,從而使機器人能夠更加可靠、精確、高效地完成工作任務。工業(yè)機器人控制系統(tǒng)的硬件主要包括人機接口設備及運動控制器等。人機接口設備為工業(yè)機器人與操作者建立交互通道,可提供可視化界面;運動控制器則主要負責工業(yè)機器人機械本體各關節(jié)的位置變化及加減速的控制等。
2? 六軸工業(yè)機器人控制系統(tǒng)的硬件架構
控制系統(tǒng)的硬件架構采用了兩級計算機的架構形式,這種架構形式可以使工業(yè)機器人在完成復雜、精細的作業(yè)任務時,能夠進行更為可靠、快速的任務規(guī)劃和分解,并且可以并行完成不同的任務部分。采用工控機作為控制系統(tǒng)的頂層設計即上位機,其提供的成熟、可靠、豐富的接口在與下位機的連接上具有顯著的優(yōu)勢,當需要更換下位機時只需要選擇合適的接口連接即可。此外,工控機還可以提供較大的存儲容量以及快速運算能力,在機器人軌跡規(guī)劃處理、運動學正逆求解等方面處理起來也游刃有余。下位機采用DMC-2163運動控制卡作為控制系統(tǒng),可以同時控制多達6個電機,具備多種接口類型實現(xiàn)與上位機、觸摸屏等設備的連接通信;DMC-2163可靠性高、運算速度快,使用方便,控制卡中灌裝的程序可獨立于上位機運行。
六軸工業(yè)機器人控制系統(tǒng),在工控機上所要實現(xiàn)的功能主要包括:一是同下位機(DMC-2163運動控制卡)及六軸交流伺服驅動器進行通信;二是軌跡規(guī)劃、插補算法運行計算以及機器人運動學求解;三是接收工業(yè)機器人狀態(tài)監(jiān)控信號以及機器人各關節(jié)所對應編碼器的位置信息,并根據(jù)獲取的信息數(shù)據(jù)進行相應處理。下位機DMC-2163接收到工控機發(fā)出的控制指令后,會根據(jù)指令執(zhí)行相應的程序并將執(zhí)行信號發(fā)送到交流伺服驅動器,經(jīng)相應信號處理后,交流伺服驅動器會將驅動指令發(fā)送給機器人各軸的伺服電機,驅動機器人各關節(jié)完成操作指令。與此同時,機器人各關節(jié)編碼器的反饋信號會經(jīng)過DMC-2163上傳至工控機,用于在工控機上實現(xiàn)人機交互,實時地監(jiān)控機器人的狀態(tài)和顯示數(shù)據(jù)[2]。
3? 關節(jié)伺服電機和驅動器
工業(yè)機器人的關節(jié)驅動大多采用電氣傳動方式,伺服電機及驅動器是主要部件。日本松下的MINAS系列伺服電機和驅動器,具有轉矩、位置、速度控制和組合控制等多種控制模式,在工業(yè)機器人伺服系統(tǒng)中一般采用位置控制工作模式。伺服電機配置有光電編碼器與伺服驅動器接口連接,再通過運動控制卡實現(xiàn)與上位機的信號傳遞。工控機發(fā)送指令到運動控制卡,就可以通過與之相連的伺服驅動器獲得電機轉動的位置信號,從而形成整個控制系統(tǒng)的閉環(huán)運行[3]。
需要注意的是,工業(yè)機器人的伺服驅動系統(tǒng),除伺服電機、伺服驅動器外,還包括減速器以及其他的外圍電氣部件。伺服電機與減速器由于直接帶動機械本體的關節(jié)轉動而安裝在機械臂中,但驅動器的正常工作需要配套的外圍電氣部件,布置時還得考慮這些部件間的信息干擾等問題。因此,如何對伺服驅動系統(tǒng)進行合理的布局至關重要。通常可以將驅動器及其外圍電氣部件布置在獨立的控制柜中,也可以根據(jù)需要將運動控制器也一并布置進去。
4? 工控機軟件設計
軟件系統(tǒng)在工業(yè)機器人控制系統(tǒng)中具有至關重要的作用,在很大程度上決定著工業(yè)機器人整個系統(tǒng)的性能。基于Windows操作系統(tǒng)的成熟性、穩(wěn)定性及可靠性,工控機的軟件設計采用其作為軟件系統(tǒng)的開發(fā)平臺,集成開發(fā)環(huán)境則采用基于C++的Qt。
根據(jù)控制軟件需求分析以及軟件設計的模塊化原則,六軸工業(yè)機器人控制系統(tǒng)的軟件總體設計為:第一步,在上位機中安裝Win7操作系統(tǒng)并部署Qt開發(fā)環(huán)境;第二步,建立一個新工程,并將DMC-2163控制卡的動態(tài)鏈接庫、頭文件和實現(xiàn)文件添加到新建的工程中;第三步,以QMainWindow為主類,使用QWidget類和QDialog類的派生類實現(xiàn)各個模塊的功能,通過Qt的信號/槽機制、全局變量、事件管理、配置文件等實現(xiàn)各模塊間的通信。
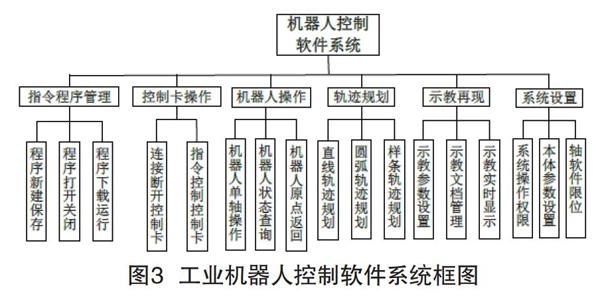
軟件系統(tǒng)功能模塊包括:指令程序管理、控制卡操作、機器人操作、軌跡規(guī)劃、示教再現(xiàn)和系統(tǒng)設置。具體如圖3所示。
5? 結語
工業(yè)機器人的應用與研發(fā)是當前工業(yè)領域技術發(fā)展的前沿與熱點,而作為工業(yè)機器人核心組成部分的控制系統(tǒng),尤其是發(fā)展的重中之重。隨著工業(yè)機器人應用范圍的不斷擴大,對其控制系統(tǒng)的可靠性、穩(wěn)定性及準確性等性能要求也不斷提高,一定程度上促進了工業(yè)機器人控制系統(tǒng)的研發(fā)進程。該文所述六軸工業(yè)機器人控制系統(tǒng)的設計與實現(xiàn),是在已有研究成果之上的應用研究,相信隨著技術的不斷發(fā)展進步,工業(yè)機器人控制系統(tǒng)的設計將日趨完善,通用性、開放性及擴展性也將日益提高。
參考文獻
[1] 李樹民,邸韜,邸仕虎.模塊化工業(yè)機器人運動控制系統(tǒng)研究與設計[J].中國建材科技,2019,28(2):108.
[2] 吳德君.六軸工業(yè)機器人控制系統(tǒng)研究與設計[J].裝備制造技術,2018(4):23-25.
[3] 吳文俊,夏蕾,陳曉斌,等.一種小功率六自由度工業(yè)機器人控制系統(tǒng)硬件設計[J].科技與創(chuàng)新,2017(14):139-140.
[4] 呂冬冬,鄭松.工業(yè)機器人開放式控制系統(tǒng)研究綜述[J].電氣自動化,2017,39(1):88-91.