空間太陽能電站的準對日定向姿態
2019-02-15 08:47:38李慶軍鄧子辰王嘉琪
宇航學報 2019年1期
李慶軍,鄧子辰,王 艷,王嘉琪
(西北工業大學工程力學系,西安 710072)
0 引 言
太陽能是一種豐富的清潔可再生能源,太陽能的合理利用對解決能源與環境問題有著重要的意義[1]。1968年美國學者Glaser首次提出了空間太陽能電站的概念,通過在太空運行的大型太陽能電池陣列產生電能,并通過無線傳輸的方式將電能傳輸到地面[2]。空間太陽能電站的概念首先得到了美國國家航空航天局和能源部的重視,他們率先開展了空間太陽能電站的概念設計和評估,并提出了首個5 GW級的空間太陽能電站設計方案:1979空間太陽能電站基準系統[3]。到目前為止世界各國已經提出了二十多個空間太陽能電站的設計方案,包括太陽帆塔[4]、圓柱型空間太陽能電站[5]、繩系空間太陽能電站[6]、Abacus空間太陽能電站[7]和多旋轉關節空間太陽能電站[8]等。
與普通的航天器相比,空間太陽能電站具有質量超大、結構尺寸超大、面質比超大、結構超柔等特點,使得空間太陽能電站表現出與普通航天器不同的動力學行為。空間太陽能電站在太空中受到多種軌道和姿態攝動因素的影響,包括地球非球形攝動、萬有引力梯度力矩攝動、太陽光壓攝動、日月引力攝動、微波反作用等[9-10]。在這些攝動因素的作用下,空間太陽能電站會偏離原軌道和姿態,影響系統的正常工作。由于空間太陽能電站尺寸和質量都超大,軌道和姿態的維持需要消耗大量的控制燃料和能量,從而提高了運行成本。在軌道保持方面,有研究者嘗試將空間太陽能電站置于地球同步拉普拉斯軌道,使地球非球形攝動和日月引力攝動造成的影響相互抵消,從而每年節省約36453 kg的控制燃料[9,11]。
在姿態方面,最簡單的姿態方案是采用萬有引力梯度穩定的姿態,如太陽帆塔、繩系空間太陽能電站等的姿態[12]。這種姿態方案在萬有引力梯度的作用下自動保持穩定[13],在不考慮其他攝動力矩的情況下只需很小的控制力矩維持。然而這種姿態方案的太陽能電池陣列無法保持對日定向,因而無法實現持續發電,而且平均發電效率低、需要在兩面安裝太陽能電池板[14]、太陽能電池板的利用率低,從而限制了這種姿態方式的應用。為了克服萬有引力梯度穩定姿態方案的缺點,很多空間太陽能電站采用對日定向姿態方案(如1979空間太陽能電站基準系統、Abacus空間太陽能電站和多旋轉關節空間太陽能電站),即對太陽能電池陣列施加姿態控制力矩,從而保持電池陣列對日指向。對日定向姿態方案需要提供隨時間呈正弦曲線變化的姿態控制力矩,對于Abacus這種超大的空間太陽能電站而言,需要提供很大的控制力矩(峰值為143000 N·m),如果采用動量交換的方式進行姿態控制,則需要采用十萬個控制力矩陀螺,使工程實現成為困難[10]。為了解決這個問題,Wie等[10]提出了采用離子推進器的控制方法,并設計了低帶寬的前饋-反饋控制器。為了實現太陽能電池陣列對日定向的高精度姿態控制,Wu等[15]設計了時變魯棒最優控制器,采用干擾抑制和線性二次型最優控制相結合的辦法,實現了對Abacus空間太陽能電站的高精度對日指向。Li等[16]針對姿態攝動因素隨時間呈周期性變化的特點,設計了基于雙曲正切切換的迭代學習控制方法,在考慮傳感器噪聲、空間姿態攝動、轉動慣量不確定性和目標軌跡慢時變的情況下進行數值仿真,提高了姿態控制精度的同時降低了對噪聲的敏感性。雖然上述的姿態控制方法能達到較好的控制精度,但對于大型的太陽能電池陣列仍然需要提供較大的姿態控制力矩。
為了避免對日定向姿態所帶來的巨大姿態控制力矩問題,研究者們嘗試提出新的空間太陽能電站概念。美國提出了太陽盤空間太陽能電站,通過太陽盤的自轉保持太陽能電池陣列對日定向[17-18]。另外美國提出的圓柱型空間太陽能電站[5]和西安電子科技大學提出的具有球形反射鏡的SSPS-OMEGA方案[19-21],由于結構具有對稱性,降低了萬有引力梯度力矩的影響。錢學森空間技術實驗室提出了多旋轉關節空間太陽能電站,將大型的太陽能電池陣列用多個較小的太陽能電池子陣代替,并將太陽能電池子陣沿南北方向排列,從而大大降低了每一個子陣所需的姿態控制力矩(峰值僅為12 N·m左右)[16]。除了在概念方案設計上改進外,另外一種解決辦法是從姿態方案本身提出改進,從而放松對概念方案設計的要求。Elrod[22]提出了一種不需要控制就能使航天器保持在某個方向附近振動的準慣性定向姿態方案。如果空間太陽能電站采用準慣性定向姿態方案,通過選擇合適的姿態初始條件,在無控的情況下太陽能電池陣列可以在空間中某個固定的方向(本文稱為主方向)附近作小幅度振動,主方向可以是軌道平面內的任一方向。然而文獻[22]中提出的概念認為主方向是固定不變的,而實際上太陽的方向在地心慣性坐標系中是緩慢變化的。Sincarsin在準慣性定向姿態的基礎上進一步考慮了太陽方向的緩慢變化,并將這種姿態稱為準對日定向姿態[23]。
本文在文獻[23]的基礎上研究準對日定向姿態方案,為空間太陽能電站的太陽能電池陣列提供一種可選的姿態方案。本文第1節和第2節通過一個簡化的姿態動力學模型闡述了準對日定向姿態的概念,給出了準對日定向姿態構造的數值方法,并從發電效率和所需姿態控制燃料兩方面對比了對日定向姿態和準對日定向姿態。第3節設計了姿態控制器,使太陽能電池陣列在任意姿態初始條件下收斂到準對日定向姿態。第4節進一步考慮了系統的軌道運動、偏航和滾轉運動、結構振動對準對日定向姿態的影響。最后一節總結了本文研究得到的結論。
1 簡化的姿態動力學模型
空間太陽能電站的姿態動力學與控制主要關注太陽能電池陣列的對日指向和微波發射天線的對地指向。本文旨在提出一種太陽能電池陣列的對日指向俯仰運動姿態方案,因而暫不考慮微波發射天線的對地指向問題。為了簡化動力學分析過程,本文只考慮萬有引力梯度力矩的影響,而忽略軌道攝動力和其他姿態攝動力矩。
太陽能電池陣列的長度一般比厚度大兩個數量級,且在姿態受控的情況下滾轉角和偏航角近似為零。基于上述假設,太陽能電池陣列可以簡化為質量均勻分布的線型剛體,如圖1所示。慣性坐標系的坐標原點位于地球的質心,OXY平面為軌道平面。為了給出準對日定向姿態方案的統一描述,OY軸指向初始時刻的太陽在OXY平面的投影。在此簡化模型中,太陽能電池陣列的軌道由軌道半徑r和角度θ描述,姿態由俯仰姿態角α描述。
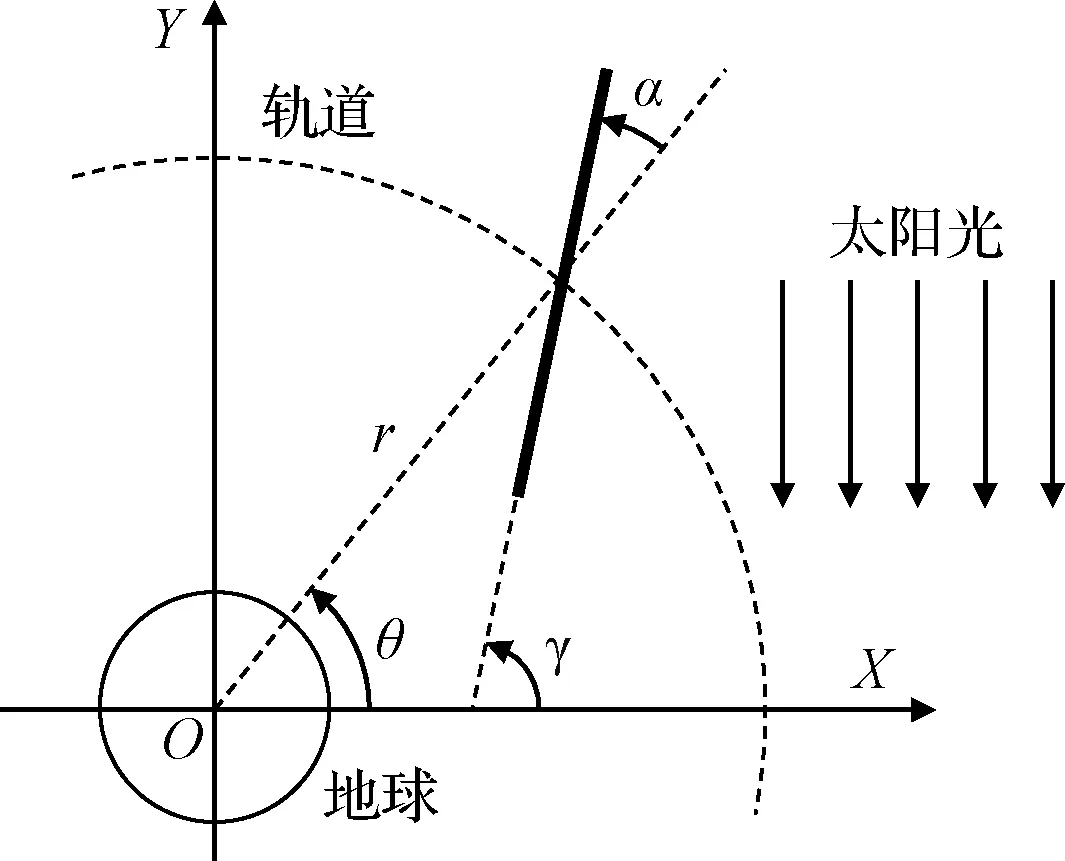
圖1 太陽能電池陣列的剛性模型Fig.1 Rigid model of solar arrays
采用Hamilton原理建立系統的動力學方程,取系統的廣義坐標為q=[r,θ,α]T,系統的動能可表示為隨質心平動的動能和繞質心轉動的動能之和:
(1)
其中,m為剛體的質量,l為剛體的長度。根據文獻[24],系統的勢能為:
(2)
其中,μ=3.986×1014m3·s-2為地球引力常數。為了對系統進行降階處理,引入系統的廣義動量[25]:
(3)

(4)
根據Hamilton原理,系統的Hamilton動力學方程為[25]:
(5)
其中,Q為廣義力,可通過虛功原理求得。當系統受到姿態控制力矩M的作用時,將式(1)~式(4)代入方程(5),得到系統的動力學方程為:
(6)
由方程(6)可知,太陽能電池陣列所受的萬有引力梯度力矩的表達式為:
(7)
2 準對日定向姿態方案
本節給出準對日定向姿態的概念、數值構造方法以及對日定向姿態和準對日定向姿態的比較。在本節的研究中,空間太陽能電站的初始軌道條件是地球靜止軌道,系統的質心位于OX軸的正方向。
2.1 其他俯仰姿態方案
對于萬有引力梯度穩定姿態,姿態角按如下規律變化:
α=0,γ=θ=ωGEOt
(8)
其中,ωGEO為地球靜止軌道的軌道角速度,由式(7)可知,萬有引力梯度力矩Tg恒為零。此時剛體的一端始終指向地心,剛體在萬有引力梯度力矩的作用下處于穩定的平衡狀態[13]。這種方案穩定性好、易于保持,但太陽能電池陣列沒有保持面向太陽,因此無法持續供電,發電效率低,需要在太陽能電池陣列的兩面安裝太陽能電池板,太陽能電池板也沒有得到充分利用。
為了避免上述問題,可以采用對日定向姿態方案,對太陽能電池陣列施加姿態控制力矩,從而使其保持垂直于太陽光方向在軌道平面的投影。由于太陽初始時刻位于Y軸的正方向,從地球指向太陽在軌道平面的投影的單位向量可由下式計算:
vSun=[-sin(ωSunt),cos(ωSunt)]T
(9)
其中,ωSun為地球繞太陽公轉的角速度。對日定向姿態方案的姿態角變化規律為:
(10)
由式(7)可知,姿態控制力矩隨時間呈正弦規律變化,幅值與系統的轉動慣量成正比。因此對于大型的太陽能電池陣列,需要消耗較多的控制燃料。
2.2 準對日定向姿態的概念
為了降低姿態控制燃料的消耗,同時使航天器有一定的指向能力,Elrod提出了準慣性定向的姿態方案[22]。他的方案不考慮太陽方向隨時間的變化,即太陽一直位于Y軸正方向,為了節省姿態控制能量,方程(6)中的控制力矩M取為零。為了更清楚地闡述準慣性定向姿態,取初始條件為
(11)
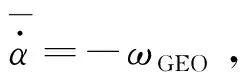
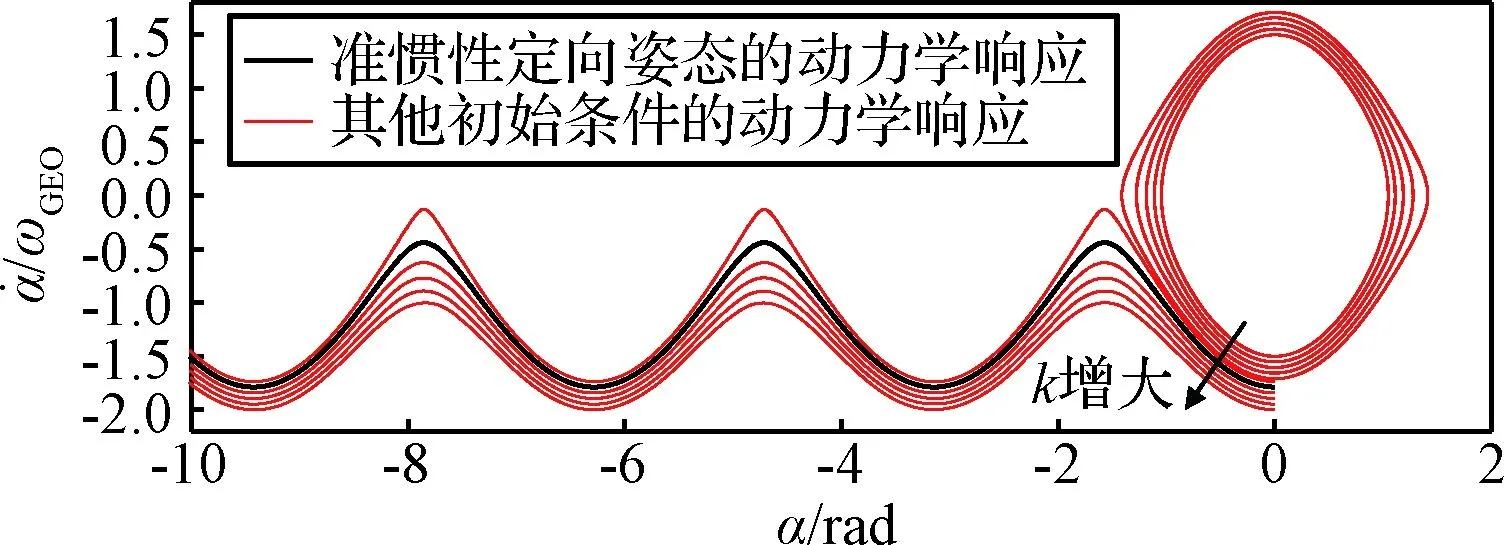
圖2 α的相圖Fig.2 Phase diagram of α
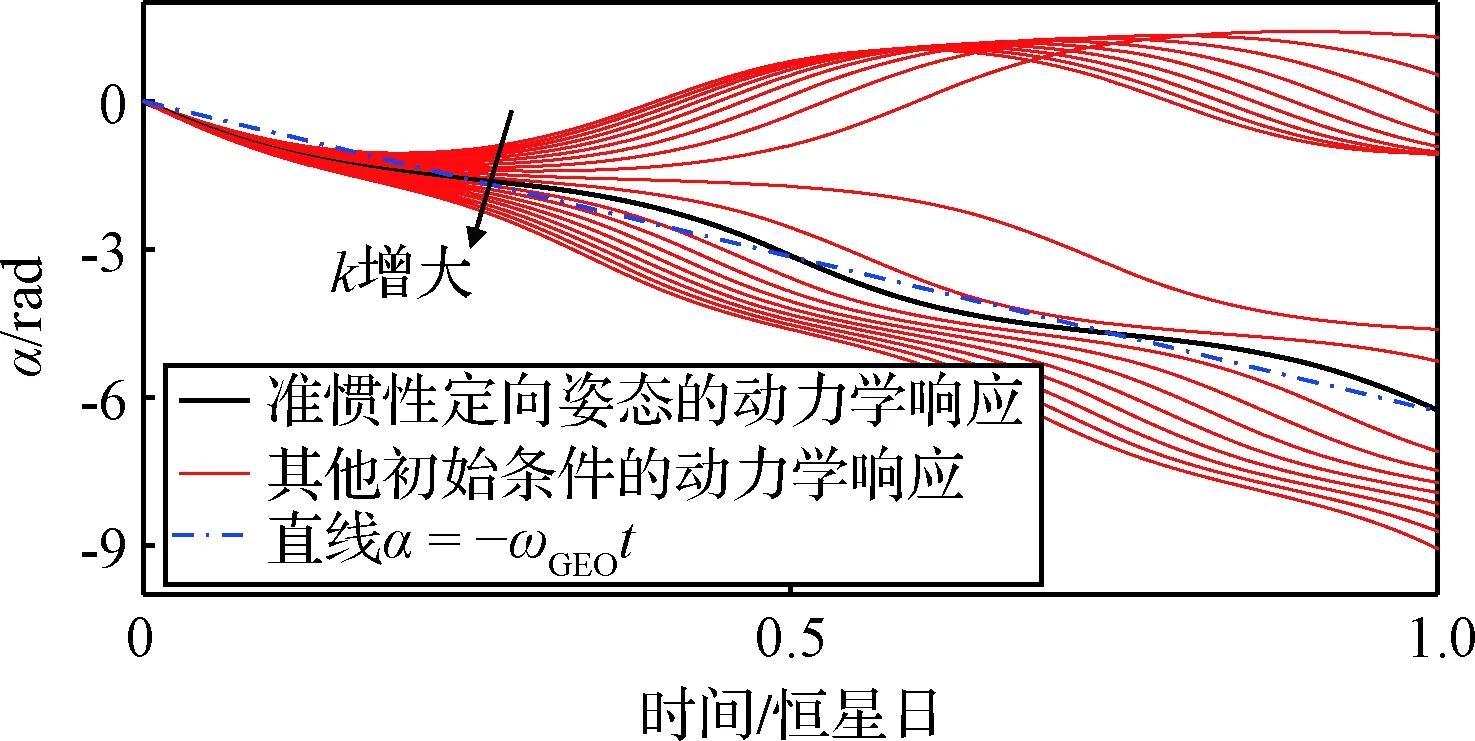
圖3 α隨時間的變化Fig.3 Dynamic response of α
圖4給出了準慣性定向姿態的相圖,由圖4可知,γ作周期振動,振幅約為±0.328 rad,γ的平均角度方向稱為主方向,圖4所示的主方向為γP=0。為了更清晰地表示三種姿態方案的區別,圖5給出了這三種姿態方案的示意圖。
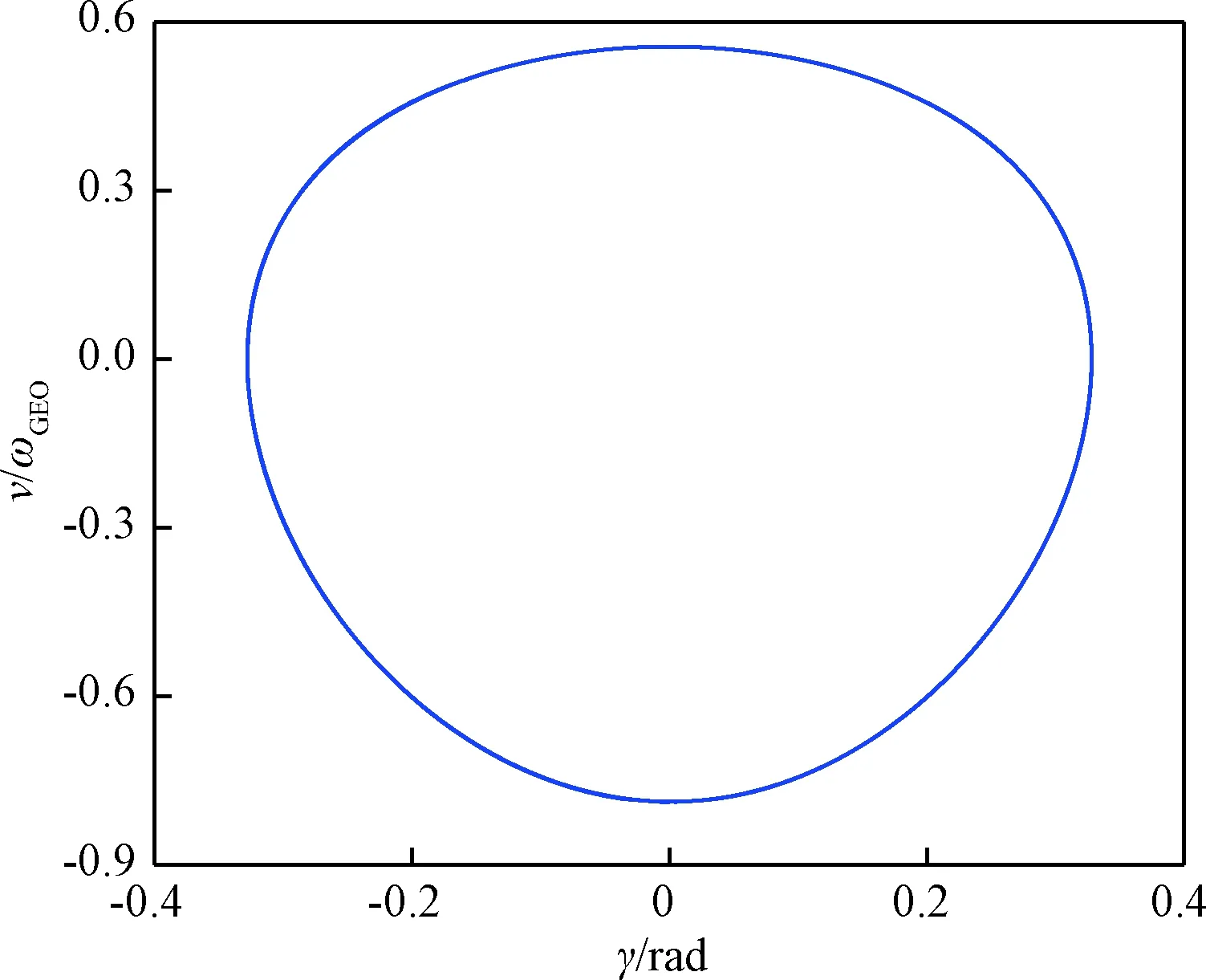
圖4 準慣性定向姿態的相圖Fig.4 Phase diagram of quasi-inertial oriented attitude
Elrod提出準慣性定向姿態的概念時,沒有考慮主方向需要隨時間變化的情形。而太陽在慣性坐標系XOY中的方向是按式(9)緩慢變化的,因此太陽能電池陣列的主方向需要跟隨太陽方向的變化,即采用Sincarsin提出的準對日定向姿態。對于運行在地球靜止軌道的空間太陽能電站而言,不考慮太陽方向的變化時,主方向應為γP=0,一個準慣性定向姿態的周期應為一個軌道周期,即一個恒星日,且周期末時刻的γ和v值與周期初始時刻均相同,即:
γ(t=23×3600+56×60+4)=γ0=0
(12)
v(t=23×3600+56×60+4)=v0=vQI
(13)
式中:vQI為常數。當考慮太陽方向的改變時,主方向應為γPS=ωSunt,準對日定向姿態的一個周期應為一個太陽日,且周期末時刻的v與周期初始時刻相同,周期末時刻的γ值與γPS的值相同,表示為:
(14)
v(t=24×3600)=v0=vQIS
(15)
式中:vQIS為常數。
2.3 準對日定向姿態的數值構造

定義周期末的姿態誤差為
E=γ(t=24×3600)-24×3600×ωSun
(16)
通過選擇不同的v0,得到不同的E值,從而形成了從v0到E的映射E=f(v0),其圖像如圖6所示。圖中的不連續點是由于當v0從小到大經過該點時,姿態角α從翻滾的狀態變成了擺動的狀態[13],從而產生了姿態誤差的不連續。從圖6可以看出,曲線在較大的v0范圍內與橫軸只有一個交點,因此可以采用二分法求解映射E=f(v0)的零點,從而得到vQIS的準確數值。為了提高收斂速度,也可以在較小的范圍內采用弦割法。本文采用弦割法得到的初值約為vQIS=-0.7871676ωGEO,準對日定向姿態的γ響應如圖7所示。同理可求得的準慣性定向姿態初值為vQI=-0.7879522ωGEO。
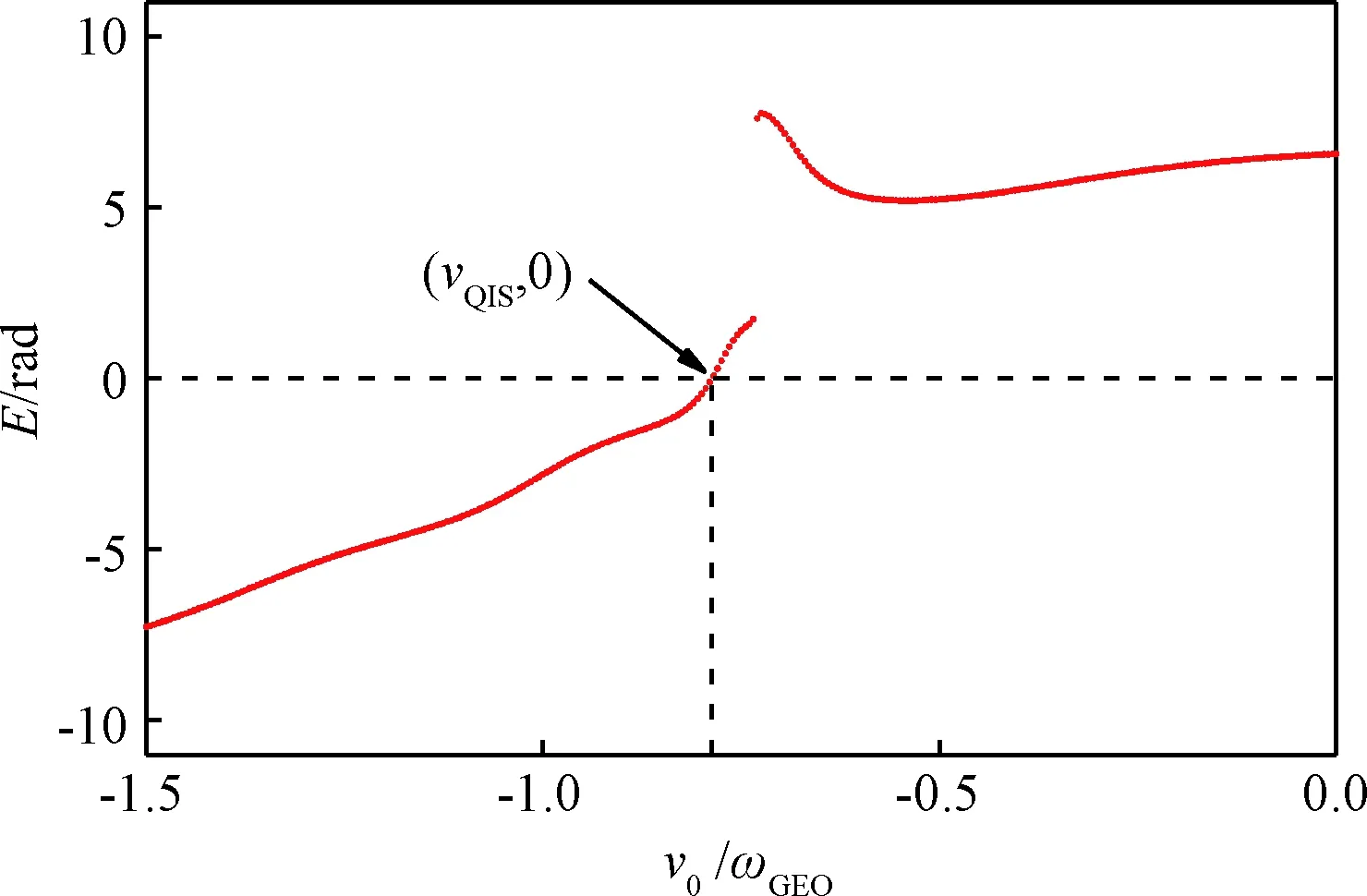
圖6 不同v0下的周期末姿態誤差Fig.6 Attitude errors at the end of a period versus v0
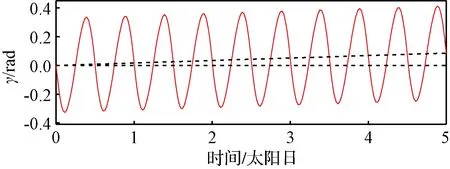
圖7 準對日定向姿態的γ時間響應曲線Fig.7 Time history of γ for quasi-Sun-pointing attitude
2.4 太陽光的捕捉率與姿態控制燃料比較
萬有引力梯度穩定姿態方案、對日定向姿態方案和準對日定向姿態方案的不同之處主要有兩方面:第一是太陽光的捕捉率η不同,在本文中定義為垂直于太陽光方向的太陽能電池陣列面積與太陽能電池陣列面積之比;第二是控制力矩不同。在春分或秋分的一天時間內,太陽可認為位于軌道平面內,三種姿態方案的η隨時間變化規律如圖8所示。從圖8可以看出,對日定向姿態方案的太陽光捕捉率恒為1;萬有引力梯度穩定姿態的太陽光捕捉率按余弦函數的絕對值變化,在一天內從一兩次變為0,再變為1,均值為0.637;而準對日定向姿態的太陽光捕捉率在1附近作小幅度振動,最小值為0.947,均值為0.973。值得注意的是,在萬有引力梯度穩定方案中的太陽能電池陣列需要在正反兩面都安裝太陽能電池板,否則發電效率減半,而對日定向和準對日定向姿態方案中的太陽能電池陣列只需在一面安裝太陽能電池板,因而太陽能電池板的利用率較高。如果不是春分或秋分,由于太陽能電池陣列垂直于赤道平面,所以只能捕捉到太陽光在赤道平面的分量,即圖8中所有點的數值應乘以太陽赤緯的余弦值。在以下分析中只考慮春分或秋分的情況。
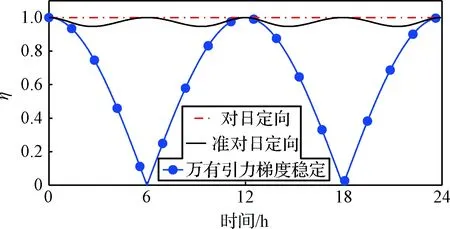
圖8 三種姿態方案的太陽光捕捉率(春分或秋分)Fig.8 Ratios of captured area of solar radiation to area of solar arrays (at equinoxes)

(17)
該力矩可采用一對力偶來提供,則每一個力的大小的變化規律應為
F=|Tg/3200|
(18)

(19)
因而一年內消耗的燃料約為36791 kg。
3 準對日定向姿態控制
雖然準對日定向姿態通過自身的運動避免了萬有引力梯度力矩的影響,但初始時刻的微小誤差會隨時間放大,因此需要對太陽能電池陣列的準對日定向姿態進行控制。
3.1 控制器設計
為了使太陽能電池陣列在初始姿態誤差條件下收斂到準對日定向姿態,并保持姿態的穩定性,本文設計比例-微分控制器進行姿態控制。控制誤差定義為
e=α-α*
(20)
式中:α*是準對日定向姿態的姿態角。雖然α*沒有解析表達式,但可以通過數值方法得到α*在每一時刻的值。另外也可以對α*在每一時刻的值進行快速傅里葉變換,從而用截斷的傅里葉級數近似地表示α*,這樣做的優點是可以對α*進行求導數或積分等理論運算。控制力矩表達式如下:
(21)

(22)
式中:ωc為控制器的帶寬,ζ=0.7為控制器的阻尼比。數值仿真中將給出不同的控制器帶寬的控制效果。
3.2 控制效果數值仿真
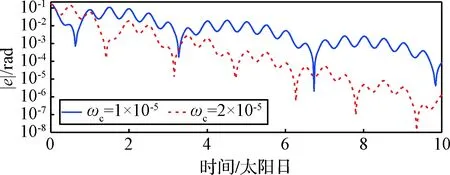
圖9 控制誤差Fig.9 Control error
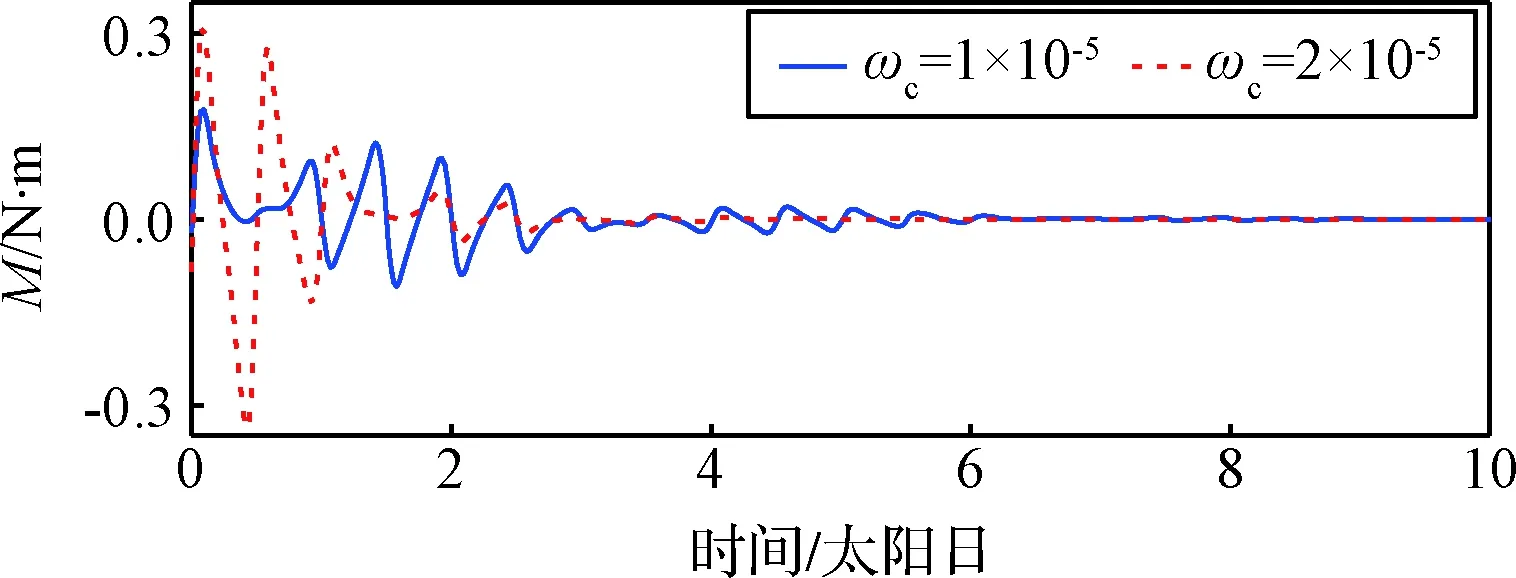
圖10 控制力矩Fig.10 Control moment
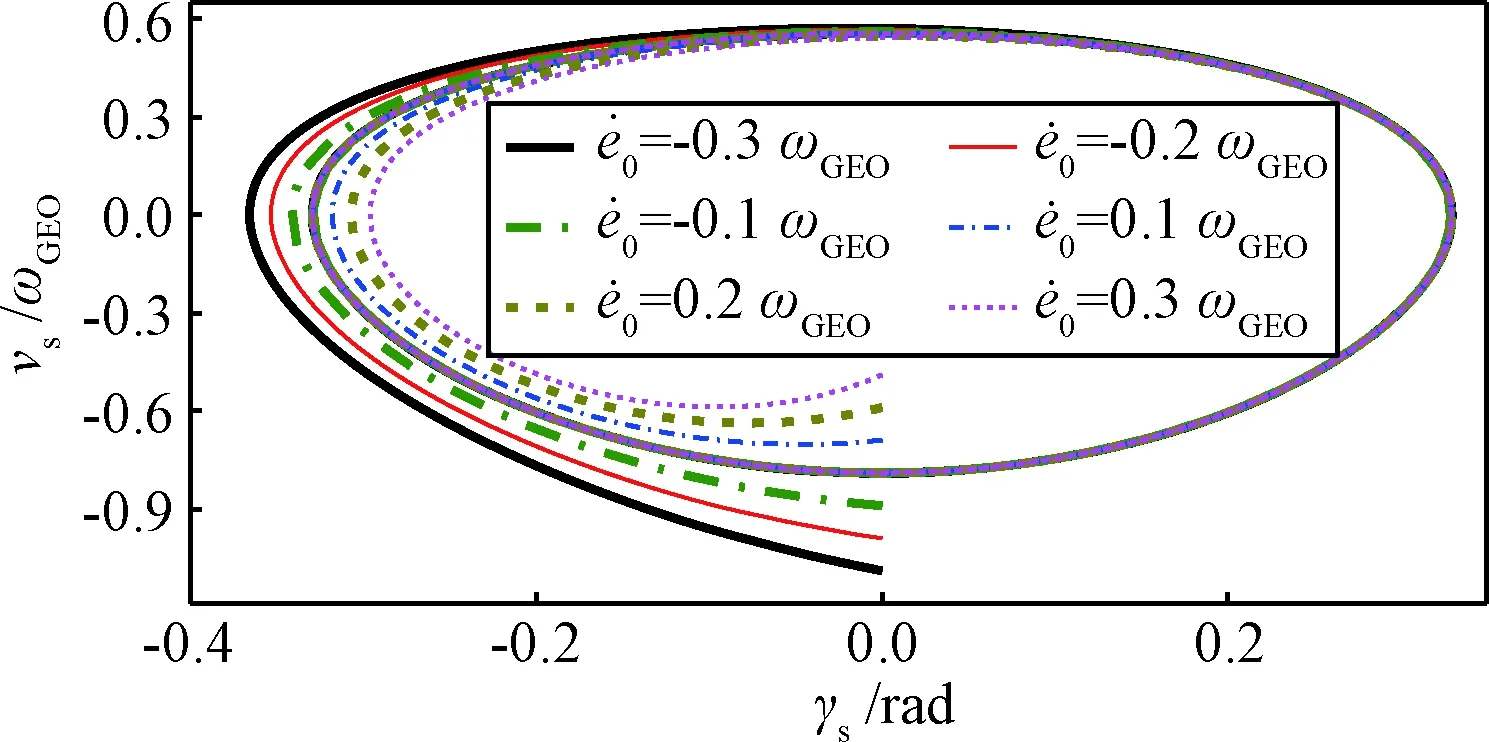
圖11 不同初始條件下的γs相圖Fig.11 Phase diagram of γs for different initial conditions

4 航天器運動對準對日定向姿態的影響
本節在前文的研究基礎上,進一步研究系統的軌道運動、偏航姿態運動、滾轉姿態運動和結構振動對準對日定向姿態的影響規律。
4.1 軌道運動的影響

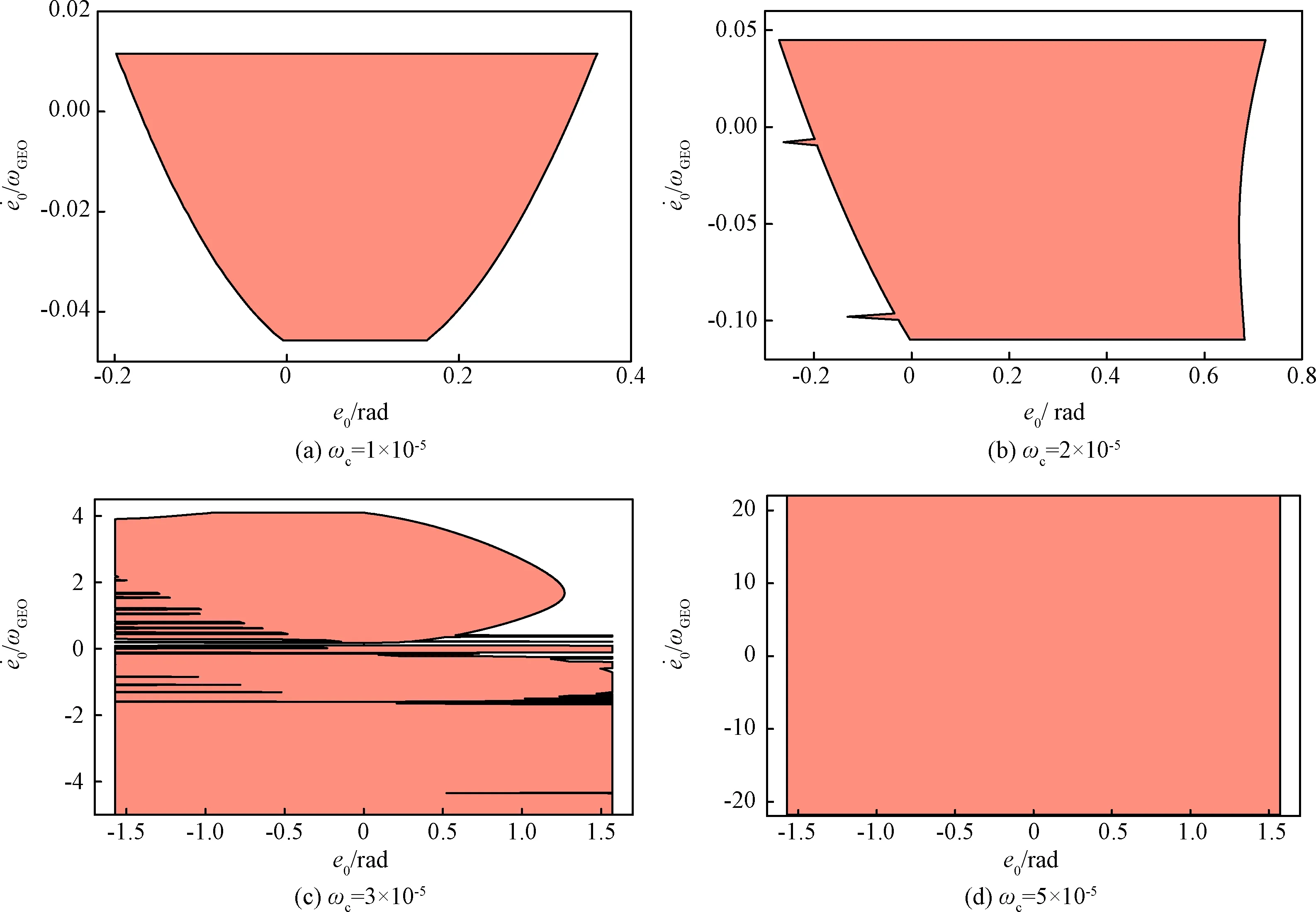
圖12 不同控制帶寬的控制器收斂區域Fig.12 Convergence domains of the controller for different bandwidths
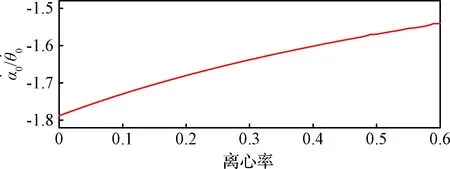
圖13 軌道離心率對準慣性定向姿態初值的影響Fig.13 Effect of orbital eccentricity on initial condition of quasi-inertial oriented attitude
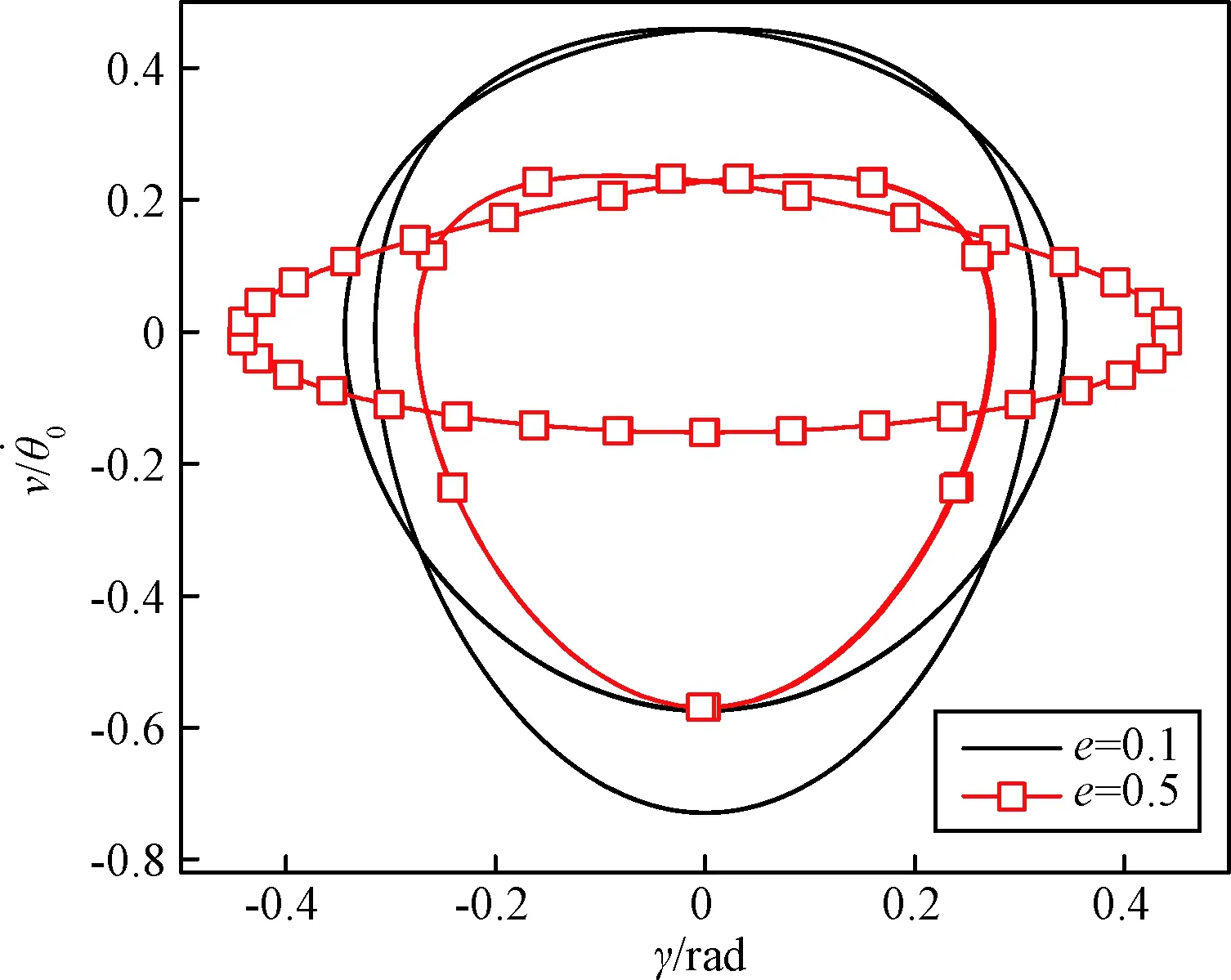
圖14 橢圓軌道下準慣性定向姿態的相圖Fig.14 Phase diagram of quasi-inertial oriented attitude in elliptic orbits

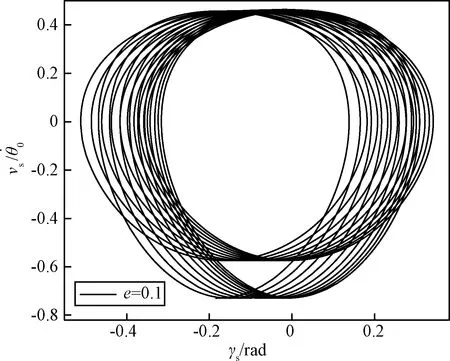
圖15 橢圓軌道下的γs相圖Fig.15 Phase diagram of γs in an elliptic orbit
接下來研究圓形軌道下軌道半徑對準對日定向姿態的影響。在圓形軌道假設條件下,動力學方程(6)可簡化為:
(23)
將上述動力學方程的自變量變換為θ=ωt,得:
(24)
式中:上標兩撇代表對θ求二階導數。由方程(24)可知,α隨著θ的變化規律跟軌道半徑(軌道角速度)無關,從而可以判斷在不同軌道半徑的圓形軌道,都存在準慣性定向姿態和準對日定向姿態。準慣性定向姿態的初始條件與地球靜止軌道上的情況相同。
4.2 偏航和滾轉的影響
空間太陽能電站在軌運行時,需要對太陽能電池陣列進行姿態控制,以保持其姿態指向精度。在此情形下,可以認為偏航運動、滾轉運動的角度以及相應的角速度與俯仰運動相比都是小量。在地球質心建立慣性坐標系OXYZ,其中OZ軸與軌道平面垂直,OY軸指向初始時刻的太陽在OXY平面的投影。將太陽能電池陣列近似看作長方體,oxyz為慣性主軸坐標系,采用z-y-x順序的歐拉角對太陽能電池陣列進行姿態動力學建模,分別表示為φ,θ和ψ,如圖16所示。
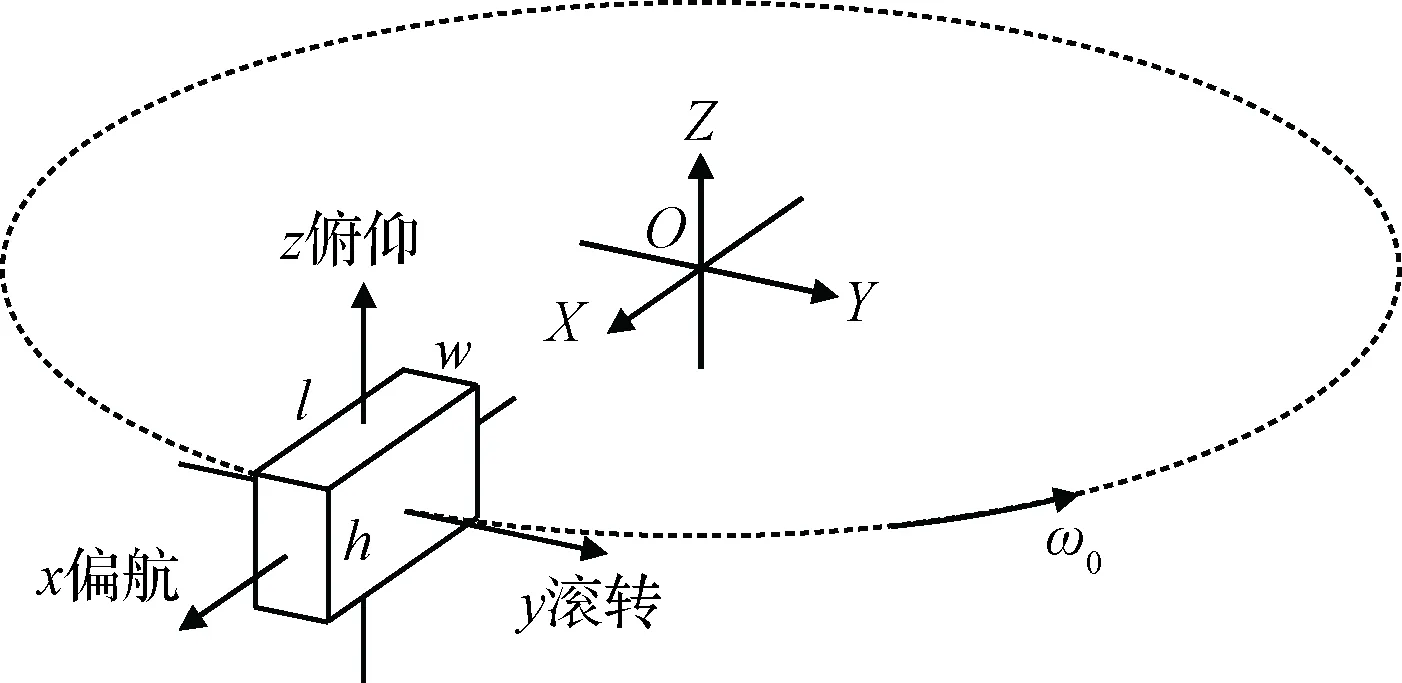
圖16 太陽能電池陣列的三維簡化模型Fig.16 Three dimensional simplified model for a solar array
姿態運動學方程和動力學方程分別為[26]
(25)
(26)
式中:c和s分別代表cos和sin。式(26)中的Tg=[Tgx,Tgy,Tgz]T為萬有引力梯度力矩[26]
Tg=3ω2n×(In)
(27)
式中:I為慣量矩陣,n=[nx,ny,nz]T為從衛星指向地心的單位矢量,可由下式計算
n=A[-cocωt,-sinωt,0]T
(28)
式中:A為姿態矩陣。
當θ,ψ,ωx和ωy均為小量時,可將sinθ和sinψ分別用θ和ψ代替,cosθ和cosψ均用1代替,且忽略小量相乘的項,則俯仰姿態的動力學方程可從上述三維的姿態動力學方程中解耦出來:
(29)
式中:φ即為二維簡化模型里的γ,因此φ-ωt可看作是α。通過將三維的姿態動力學方程忽略高階項,得到解耦的俯仰姿態動力學方程,這說明太陽能電池陣列的偏航和滾轉運動對俯仰運動的影響都是高階小量,在姿態受控的情況下可以忽略。
為了進一步簡化方程(29),設δ=(Iy-Ix)/Iz,對于如圖16所示長、寬、高分別為l,w,h的太陽能電池陣列,有
(30)
當w/l的值變化時,δ的變化如圖17所示。由于太陽能電池陣列的w通常比l小一兩個數量級,因此δ約為1。從而方程(29)可進一步化簡為方程(23),這說明了本文將太陽能電池陣列看作線型剛體的假設是有效的。由圖17可知,對于普通的衛星,三個方向的轉動慣量比較接近,因此δ非常小,從而俯仰姿態受到萬有引力梯度力矩的影響也比較小。
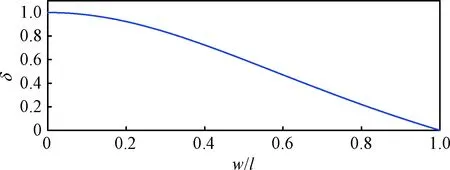
圖17 δ的變化規律Fig.17 Variation of δ
4.3 結構振動的影響

圖18給出了柔性梁的控制誤差圖,由圖18可知,對日定向姿態的姿態誤差最大約為0.5°,而準對日定向姿態的誤差比對日定向姿態小一個數量級。圖19給出了梁的控制力矩,對日定向姿態需要的控制力矩最大值約為12 N·m,而準對日定向姿態的最大控制力矩僅為0.08 N·m。對日定向姿態的控制誤差和控制力矩均按三角函數的規律變化。在軌運行過程中,梁的端點振動情況如圖20所示。由圖20可知,對日定向姿態的梁端點振幅約為0.63 m,而準對日定向姿態的梁端點振幅約為0.017 m。
通過以上研究發現,在梁的結構振動影響下,準對日定向姿態出現了較小的姿態誤差,從而需要控制力矩來維持,但姿態誤差和控制力矩都很小。同時,準對日定向姿態下梁的振動比對日定向姿態下梁的振動幅值減小約40倍。
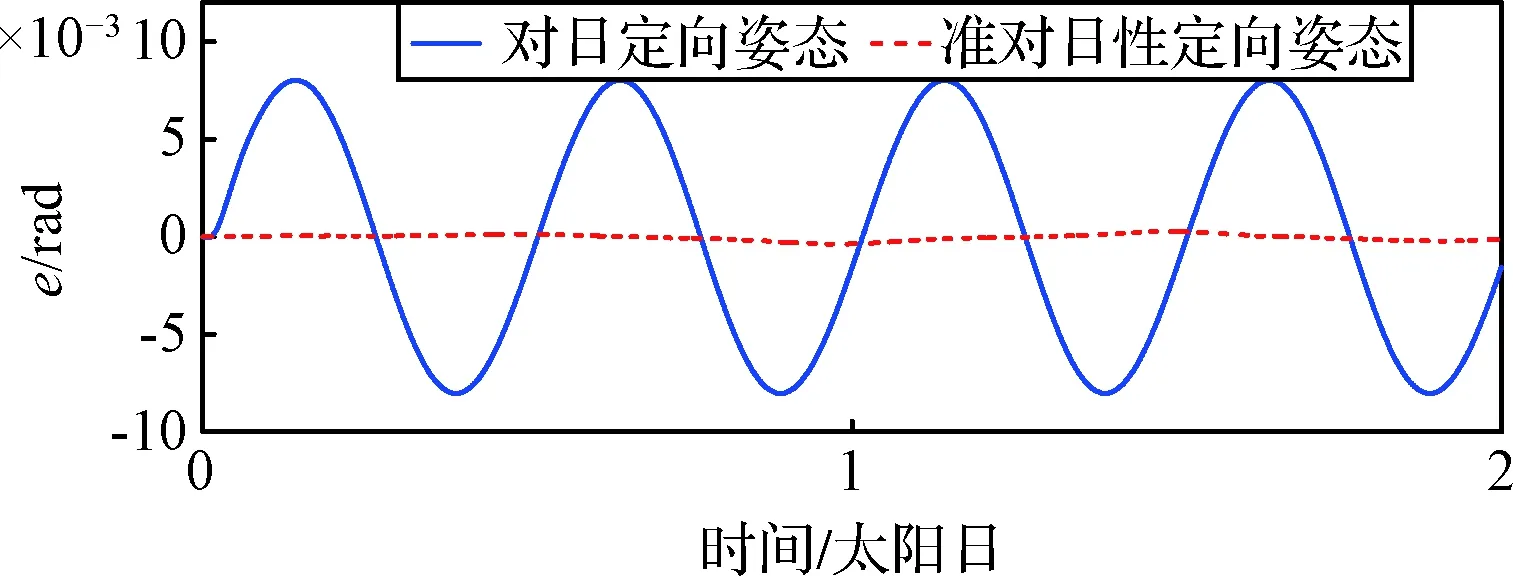
圖18 梁的姿態控制誤差Fig.18 Attitude control errors of the beam
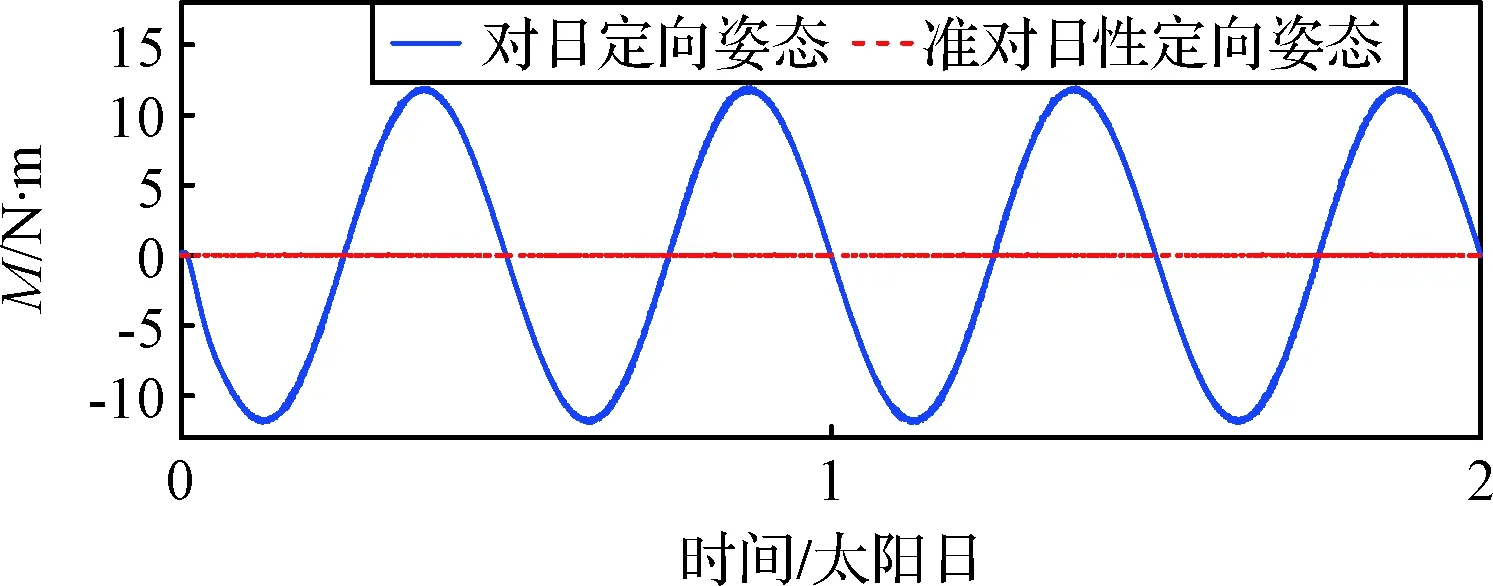
圖19 梁的姿態控制力矩Fig.19 Attitude control moment of the beam
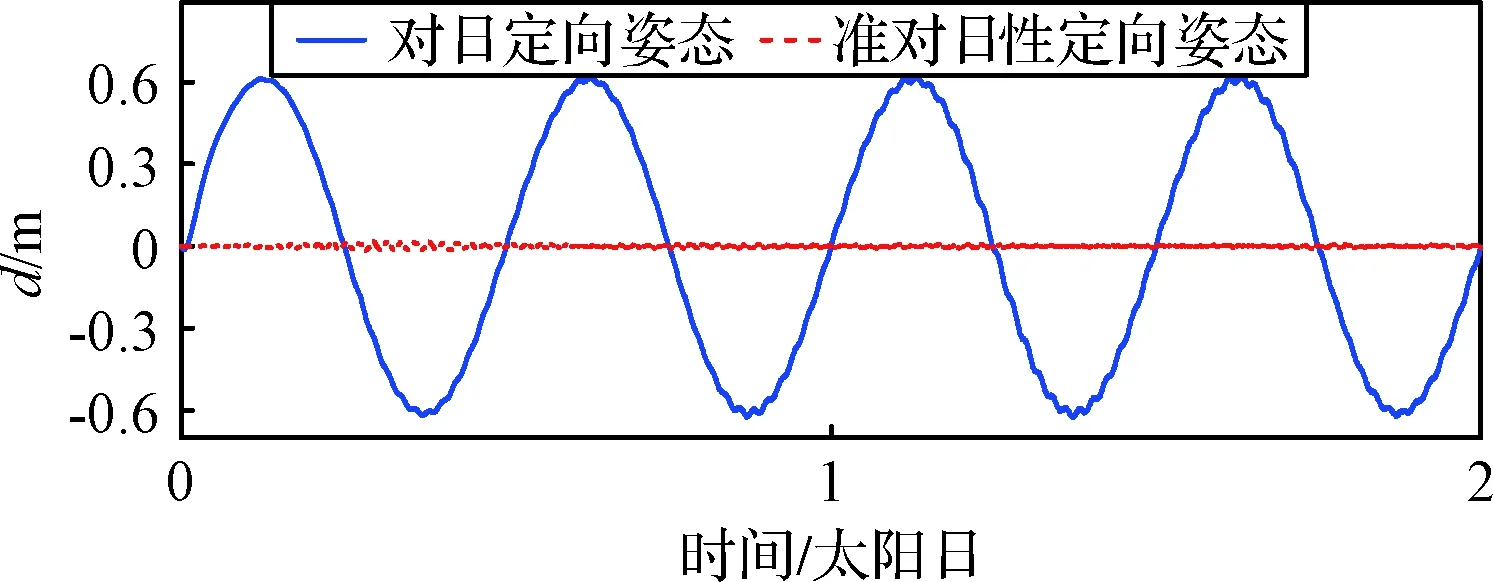
圖20 梁端點的振動Fig.20 Vibration of the tip point of the beam
5 結 論
本文研究了針對大型太陽能電池陣列俯仰姿態的準對日定向姿態方案,并通過弦割法給出了準對日定向姿態的初值。此方案與以往的準慣性定向姿態方案不同的是,此方案能適應太陽方向的長期、緩慢變化。準對日定向姿態在一天內的平均發電效率能達到對日定向姿態的97.3%。對于Abacus空間太陽能電站的離子推進姿態控制方式而言,準對日定向姿態每年能節省約36791 kg控制燃料。為了保證準對日定向姿態的穩定性,設計了比例-微分控制器。通過數值仿真發現,當控制器的帶寬大于ωc=5×10-5時,即可保證靜止軌道上的太陽能電池陣列幾乎在所有初始條件下均收斂到準對日定向姿態。最后,本文還討論了軌道運動、姿態運動和結構振動對準對日定向姿態的影響。研究發現,在離心率不為零的情況下,存在準慣性定向姿態但不存在準對日定向姿態,而在離心率為零時軌道高度對準慣性定向姿態沒有影響。在太陽能電池陣列姿態受控的情況下,偏航運動和滾轉運動對俯仰運動的準對日定向姿態的影響都是高階小量,從而可以忽略以簡化分析過程。結構的振動會引起準對日定向姿態出現微小的姿態誤差,從而需要姿態控制器維持;準對日定向姿態所需要的姿態控制帶寬、姿態誤差、姿態控制力矩和結構振動幅值跟對日定向姿態相比都小1~2個數量級。