礦用液壓支架控制器設計
2019-02-21 08:04:56張志宏
煤礦機電 2019年1期
張志宏
(山煤集團煤業管理有限公司 晉東南分公司, 山西 長治 046600)
0 引言
液壓支架是煤礦井下生產中的重要設備,用于控制液壓支架動作的電控系統是其重要部件。通過液壓支架電控系統的控制,既能實現液壓支架各個動作的自動化操作,包括:單臺支架的動作、單臺支架按照指定的順序聯合動作、幾個支架組成一個小組成組集體動作,還能通過預設的通信總線實現遠程操控。液壓支架控制器的使用不僅能提高礦井的生產效率,還能大量減少工作面工人的數量,提高礦井生產的可靠性和安全性。目前我國煤礦井下使用的液壓支架電控系統主要依賴進口,雖然國內也有少許同類型產品,但是在穩定性和安全性方面都無法達到要求。進口產品的缺點是成本高、與國產設備兼容性差、維修周期長等[1]。因此,研發一套擁有自主知識產權的液壓支架控制系統,對于降低礦井生產成本,實現無人化綜采工作面以及礦井生產自動化的發展目標具有重要意義。
本文設計的一種液壓支架控制器具有體積小、自動化程度高、功能齊全和穩定性好等優點,通過井下工業現場試驗證明,該控制器完全符合實際生產需求。
1 液壓支架電控系統整體架構
綜采工作面液壓支架數量眾多,根據工作面長度,液壓支架數量一般在100~200臺左右。通過查閱資料和借鑒現場的工作經驗可知,一般1臺控制器控制3臺液壓支架比較合理,并要求相鄰的液壓支架控制器之間能互相控制。
圖1所示為液壓支架控制系統整體結構圖,整個液壓支架控制系統可分為3層。
1)最底層是液壓支架控制器,其主要作用是收集并上傳傳感器的各種信號,控制液壓支架上的各種閥門,實現液壓支架動作。所有的液壓支架控制器作為節點掛接在由端頭控制器引出的兩條CAN總線上,如果某個控制器發送故障,端頭控制器會自動識別并報警。
2)處在中間層的是液壓支架端頭控制器,其主要功能是將最底層液壓支架控制器收集到的傳感器信號上傳給地面的監控站,下發控制命令等。
3)最上層是地面監控室,可以在組態界面里看到液壓支架各種實時的運行參數,還可以遠程操控液壓支架的動作。
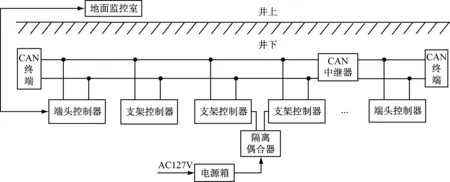
圖1 液壓支架控制系統整體結構圖
整個系統的供電采用井下現有的AC127V電源,通過電源箱的整流濾波后,變為控制器能夠使用的直流低電壓電源[2]。
2 控制器硬件設計
2.1 液壓支架控制器結構
圖2所示為液壓支架控制器硬件總體架構。
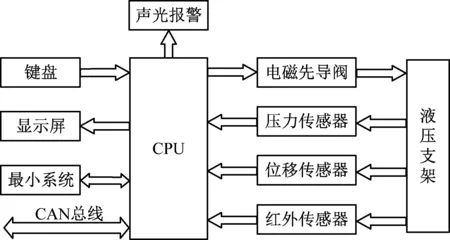
圖2 液壓支架控制器硬件架構圖
整個液壓支架控制器硬件由以下幾個模塊組成。
1)人際交互模塊。包括鍵盤、顯示屏。鍵盤用于參數的輸入和界面控制,顯示屏顯示各種傳感器實時數據以及液壓支架動作狀況。
2)聲光報警模塊。當有故障發生,提示工作人員故障位置和故障種類,便于及時關閉系統,避免造成更大的事故。
3)最小系統模塊。主要包括時鐘電路、電源、下載接口等。
4)通信模塊。主要是CAN通信,具有傳輸速度快、傳輸距離遠和抗干擾強等特點。
5)傳感器模塊。包括壓力傳感器、紅外傳感器、位移傳感器等,壓力傳感器主要用來監控液壓腔內的壓力,位移傳感器監測液壓支架動作位移的大小,紅外傳感器主要用來監測采煤機的實時位置,便于分析液壓支架下一步的動作[3]。
2.2 主控制器CPU選型
由于工作面空間有限而液壓支架控制器使用數量多,故不便使用以PLC為主控制器的設計方案。本系統使用了以單片機為主控制器的硬件電路設計方案[4]。
STM32F103ZET6微控制器是意法半導體公司生產的基于ARM架構的一款32位處理器芯片,主頻為72 MHz,供電電壓為3.3 V。表1所示為CPU主要硬件資源。

表1 CPU內部主要硬件資源
2.3 CAN通信硬件電路
圖3所示為CAN通信硬件電路圖。該系統使用的TJA1050T型CAN收發芯片具有較高性能和集成度,該芯片在系統中的主要作用是通信協議的控制和物理總線接口,具有較強的差動收發能力,適合遠距離信號的傳輸。由于井下環境比較復雜,各種干擾時有發生,為了保障CAN總線能夠穩定地進行信號傳輸,系統加入了光電耦合模塊來消除干擾,在模塊兩端采用不同的接地方式,能有效地防止共模信號的干擾。在信號的出口處加入了鉗位電路,以防線路上突然的電壓變壓對芯片造成的損害。
C1和C2電容能有效地吸收通信線路上的高次諧波,保障通信的穩定性和準確性[5-6]。
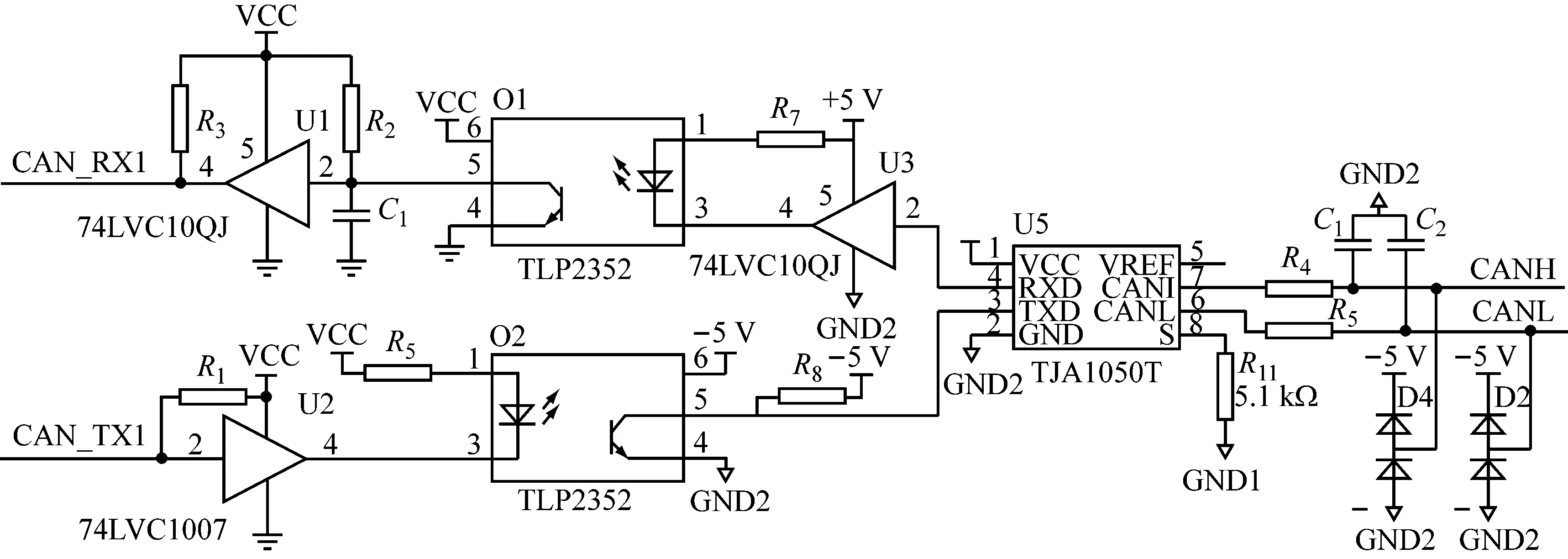
圖3 CAN通信硬件電路圖
3 系統軟件設計
3.1 單架單動作軟件設計
圖4所示為單臺液壓支架動作控制流程。設計中預設由1臺液壓支架控制器控制附近的3臺液壓支架。首先端頭控制器選擇要操控的液壓支架號,選定以后程序進入主控模式。通過CAN總線將信號下發到相應的液壓支架控制器。控制器接收到控制命令后,對命令進行翻譯,即通過對比地址來確定具體的控制對象,控制對象確定后,進入相應的控制模式并開始執行動作,接收到停止命令后停止。隨后將相應寄存器的值清0,以便為下一次的信號接收做好準備,如果沒有接收到控制命令,液壓支架控制器便一直處于空閑模式。
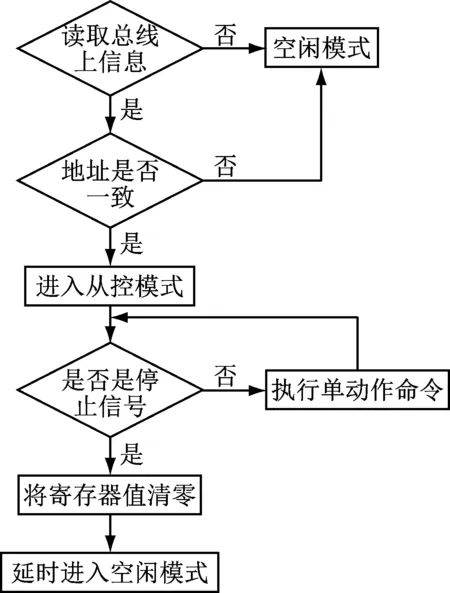
圖4 單架單動作程序流程圖
3.2 液壓支架成組動作軟件設計
成組動作由每一臺液壓支架順序聯動組成,同時需要考慮相鄰液壓支架之間位置的關系,要達到動作之間的相互配合。
圖5所示為液壓支架成組動作流程圖。支架聯動時,首先要確定動作起始和結束的支架號碼,根據聯動支架的數據計算出大概的動作時間。如果在規定時間內沒有完成動作就要發出聲光報警信息。成組聯動時,每一個動作的執行可能會同時涉及多個液壓支架,根據傳感器的信息,時刻判斷各個液壓支架的實時位置,便于程序作出動作的調整。當進入主控模式后,按下成組動作按鍵,通過液壓支架控制器之間的CAN通信總線來傳遞控制信息。動作結束后,程序會立即清除寄存器內的信息,便于接收下一次的控制命令。控制完成后自動進入到空閑模式。
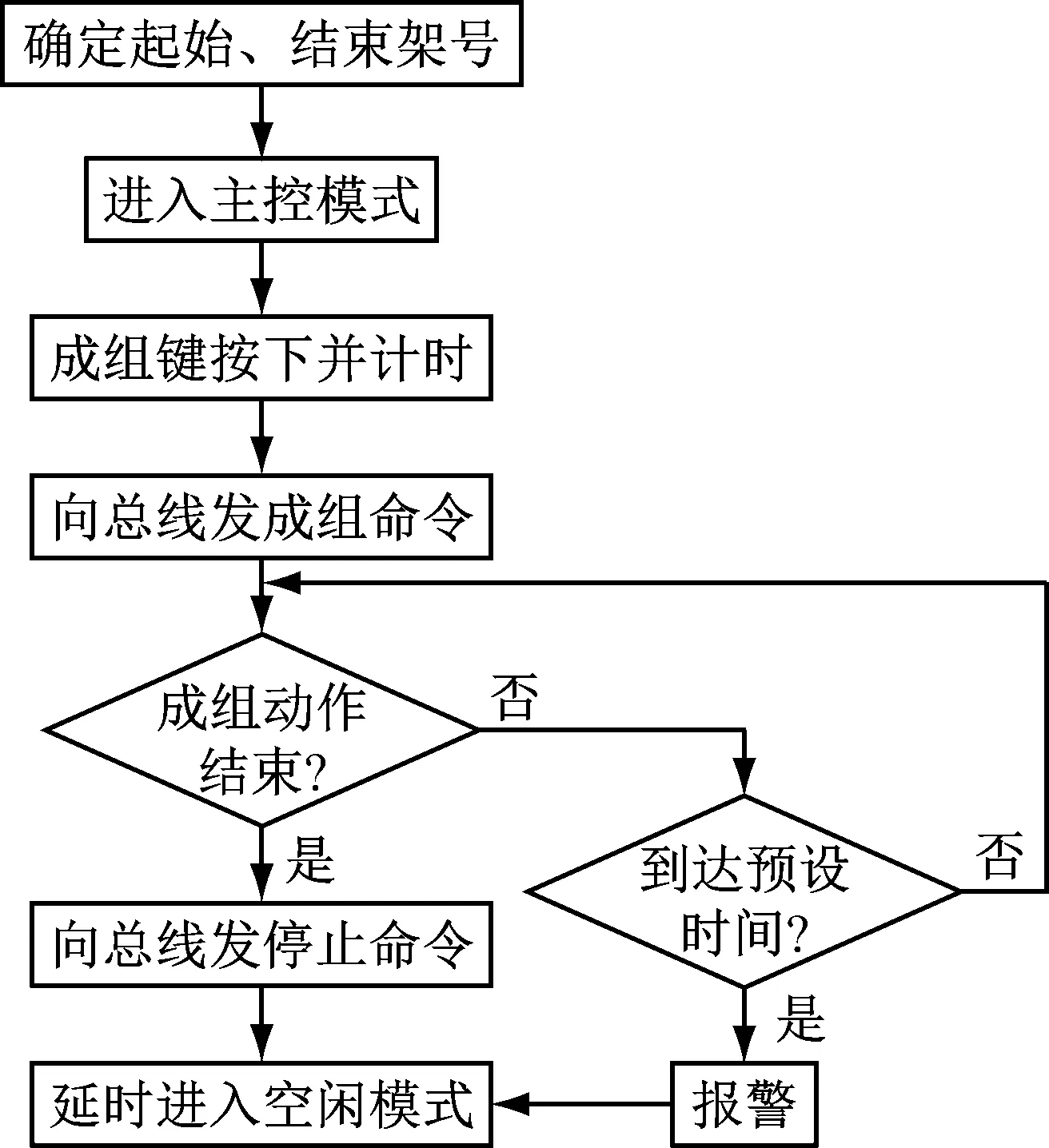
圖5 液壓支架控制器成組動作流程圖
3.3 CAN通信程序設計
系統中CAN總線上傳遞的信息主要包括兩種類型:控制命令的傳遞、液壓支架實時數據的傳遞。控制命令包括控制器與控制器之間、端頭控制器與液壓支架控制器之間等;數據的傳遞包括傳感器采集到的實時數據、液壓支架動作的實時數據等。
圖6所示為CAN通信總線節點初始化流程。首先設置相應的控制寄存器進入復位狀態,然后通過時鐘的分頻計數器設置通信的速率,即波特率。接著設置總線定時寄存器,用于信號接收的時間計算。最后設置輸入輸出接口的控制寄存器,打開中斷進入到正常的運行模式。
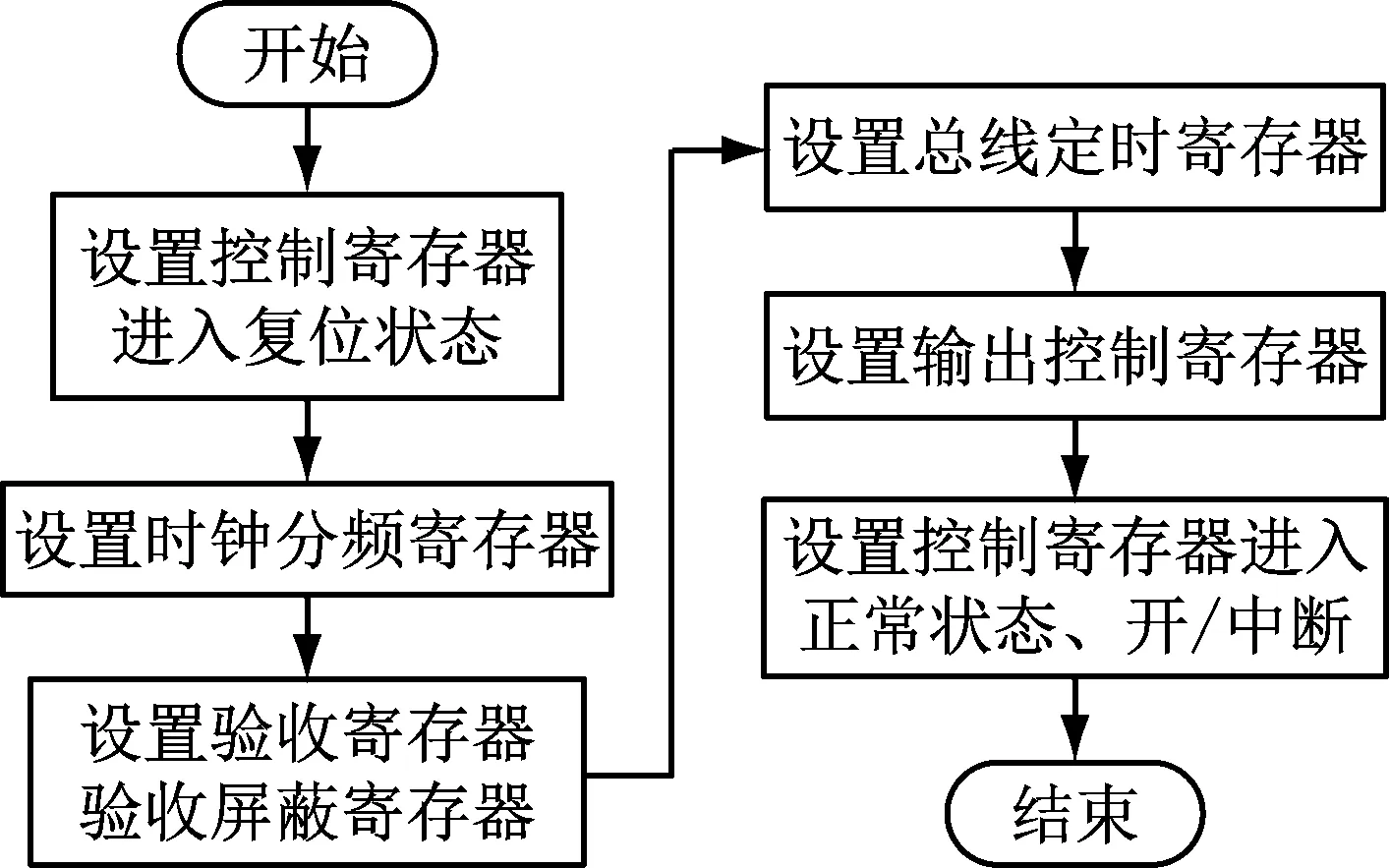
圖6 CAN總線節點初始化流程圖
4 結論
根據工業現場實際需求設計了一套液壓支架控制器,通過井下工業現場試驗表明,該設備運行穩定功能可靠,能夠滿足工業現場需求,為礦井下同類型的控制器設計提供了思路。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37