基于DLP數字微鏡的結構光三維掃描系統
2019-02-21 09:32:10陳毅楊海馬徐好婷楊萍趙凱袁寶龍李筠劉瑾
光學儀器 2019年4期
陳毅 楊海馬 徐好婷 楊萍 趙凱 袁寶龍 李筠 劉瑾
摘要:為了提高現代化生產中的效率和滿足三維掃描的需求,設計了一種能夠準確提取物件表面三維輪廓信息的掃描系統。系統采用結構光三維成像方法,先通過普通白光將光柵投影到被測物體表面,利用工業相機采集變形光柵圖,再根據變形光柵圖像中的灰度值變化,用傅里葉變換輪廓法解調出三維坐標信息。實驗結果表明,使用傅里葉變換輪廓法重構可獲得效果理想的三維點云,其為三維輪廓掃描提供了實驗方法,同時也為提高點云精度提供參考。
關鍵詞:結構光;三維成像;傅里葉變換輪廓法;點云重構
中圖分類號:TP391 文獻標志碼:A
引言
工業檢測、機器視覺、醫療科學等技術的運用,需要對三維物體進行高精度的三維掃描成像。近年來,對結構光三維掃描成像的研究逐漸增多。本文設計的三維掃描系統,通過DLP-4500數字微鏡投射編碼結構光,采用普通工業相機采集圖像,最后經過PC機處理得到三維點云。
通過對工業相機采集到的圖像進行高度恢復,每個像素點的高度信息與坐標對應起來形成像素坐標系,而像素坐標系轉換到世界坐標系還需要對相機進行標定,通過標定獲得的相機內外參數恢復物件在世界坐標系中的點云形貌。本文使用張正友標定法,克服了傳統標定法需要高精度標定物的缺點,提高了精度,且便于操作;對采集到的形變光柵圖像使用傅里葉變換輪廓術和枝切解纏繞算法求取高度信息;重構策略利用標定得到的內外參數和解碼得到的像素高度三維坐標進行坐標系變換,得到最終的三維點云模型。
1相機標定
本文通過已知特征點的像素坐標信息來求取相機的內外參數和畸變參數,利用得到參數和求取的像素坐標系點云三維信息,恢復物件在實際的世界坐標系中的三維形貌。1998年,張正友教授在《A Flexible New Technique for CameraCalibration》一文中提出通過單平面棋盤格的攝像機標定方法。
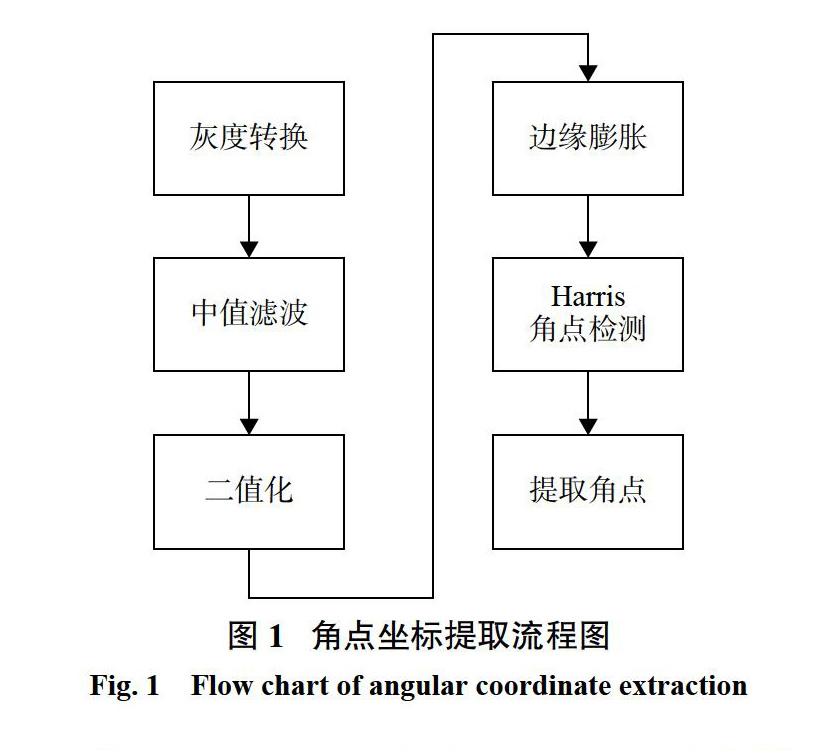
張正友標定法是使用棋盤格標定圖片,先對圖片提取角點信息,在提高精度的目標基礎上,再提取亞像素角點信息。對角點坐標提取流程如圖1所示。
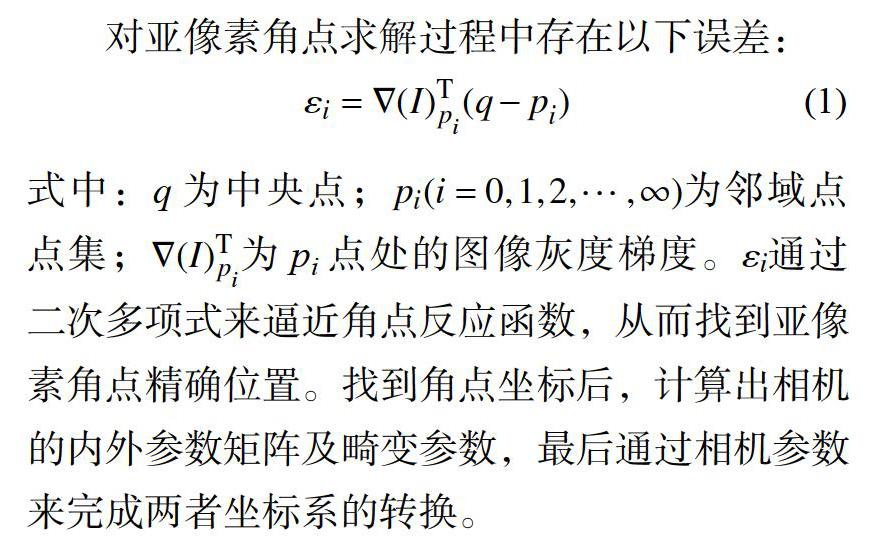
張正友標定法的目的是在Harris角點檢測算法的基礎上,通過亞像素角點坐標提取來提高參數精度。通過以下幾步來提取亞像素角點:使用初始角點信息去計算鄰域點在像素坐標系中的位置信息,由位置信息再去計算領域點在像素坐標系中的梯度信息,再由鄰域點的位置和梯度信息去求取角點位置,經過反復迭代后達到最終條件,即求得角點的亞像素信息。
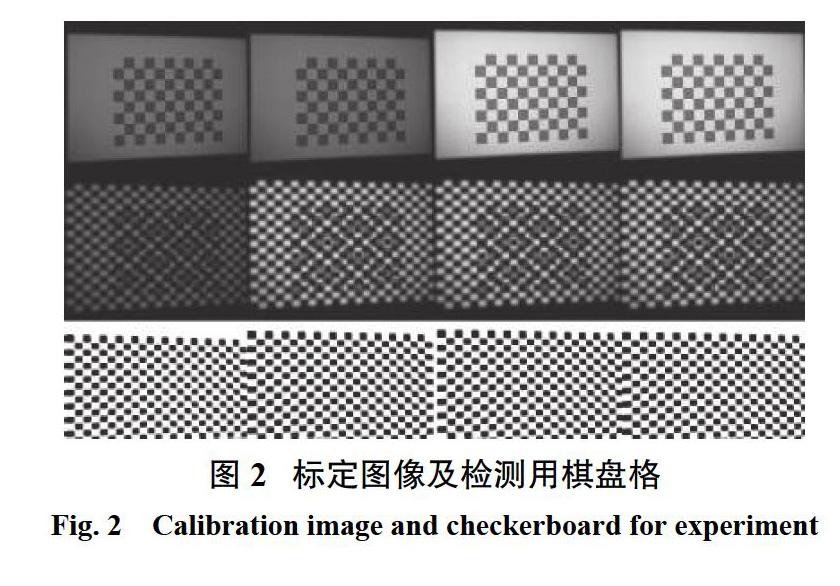
本文設計的步驟為:標定板、DLP數字微鏡投影儀和相機三者成三角方位,使得標定板的角點以及投影儀投射在標定板上的棋盤格圖案完全收納在相機的視野中。拍攝的步驟為:使用DLP數字微鏡投射白光,相機拍攝10幅圖像;再使用投影儀投射棋盤格圖案,拍攝10幅圖像,拍攝過程中三者方位關系保持不變。使用拍攝的20幅圖像,求得相機的內外參數。圖2為相機和投影儀標定圖像及檢測用棋盤格圖案。
2相位信息
獲取物件的相位分為兩步:第一步采用傅里葉變換輪廓法,通過拍攝的調制圖片解調出物件對應點的包裹相位;第二步采用枝切法對包裹相位進行解包裹,求得最終的完整連續的相位值。
2.1傅里葉變換輪廓法
Takeda于1983年采用傅里葉變換的方法,對結構光投影三維成像進行研究。本文采用傅里葉變換輪廓法求解高度信息,原因在于傅里葉變換輪廓法只需要一幅調制圖片即可求得待測物輪廓高度信息,這相比于相移法等需要幾幅物面圖像的算法,大大減少了計算量,提高了系統的運行速度。在對被測物高度信息求取時,相移法比傅里葉變換輪廓法計算精度高,但其對投影儀的投影質量和相機的像素要求也高,在工業應用上帶來不便,經綜合考慮,本文采取傅里葉變換輪廓法來求取高度信息。
本文設計了高通和低通濾波器,目的是消除零頻和高頻噪聲對攜帶有用信息的基頻的影響;采用枝切解纏繞算法,減小頻譜泄露對基于光柵條紋投影的傅里葉變換法的影響。
傅里葉變換輪廓術的原理如下:設待測物體一點坐標為(u,v),在攝像機圖像上成像于(x,y),將正弦光柵投影到待測物體表面后,光柵受表面高度影響變形,調制信息g(x,y)表示為
2.2相位展開
由于反正切函數計算出的相位是在[-x,π]區間內的值,不是物件高度對應的真正的連續相位值,包裹相位一般與真正的相位值相差2π,因此還需要通過算法對每一個像素點解出其真正的相位值。目前三維重建領域已有眾多解相位算法,本文采取Goldstein枝切法進行相位展開。Goldstein枝切法包括以下幾個步驟:區分出正負殘差點并標明其極性;用連接線連接最鄰近的殘差點使其平衡,即設置了枝切線;繞過枝切線進行路徑積分來解纏繞。
當誤差點較多時,使用枝切線不能達到很好的效果,但相比于其他主流的解包裹算法,枝切法運算速度快、占用內存小,且可以有效的規避誤差點,使其得到廣泛的應用。
3三維成像結果與分析
根據相機、投影機和物件在空間中的幾何位置關系,采用了基于三角檢測算法的點云重構策略。以投射縱向相移結構光的光柵為例,三維點云重構策略的設計思路如下:獲取照片坐標系上被結構光柵覆蓋的各點的像素坐標值,通過投射縱向結構光柵可以計算出在投影儀參考坐標系中各點對應的像素橫坐標值,通過標定計算出相機內外參數值,并將像素坐標值轉化到相機和投影儀成像坐標系對應坐標值。
圖3(a)是設計的三維掃描系統對紙杯表面掃描所成的深度圖,圖3(b)是掃描形成的點云圖,從圖中可以看出紙杯的三維輪廓和表面紋理特征。根據點云的三維坐標,可以確定物件的幾何信息,其中包括物件在世界坐標系的位置信息和深度信息。
由于得到的點云圖是一系列的點構成的圖像,在實際工業應用中并不能完整地體現物件的三維形貌信息,因此本文采取三角網格算法對得到的點云進行補充呈現。三角網格算法的主要用途在于,單個的點通過對應的算法計算后,將符合要求的鄰近點進行三角連線,點連線后形成面,最后再進行平滑處理形成完整的物件的三維面。圖4(a)是三角網格化后的圖像,圖4(b)是平滑渲染后形成的物件三維面圖像。根據實際測量值,本系統重構的三維點云中相鄰點云間隔
4結論
根據目前市場對三維掃描技術的應用需求,本文設計了能夠重構物件表面點云的三維掃描系統,對系統的標定、編碼解碼、點云重構使用了相應的算法,對物件的三維輪廓進行掃描,檢測了重構的點云滿足精度要求,可以有效地恢復物件的三維形貌。